 > Техника, страница 95 > Автожир
> Техника, страница 95 > Автожир
Автожир
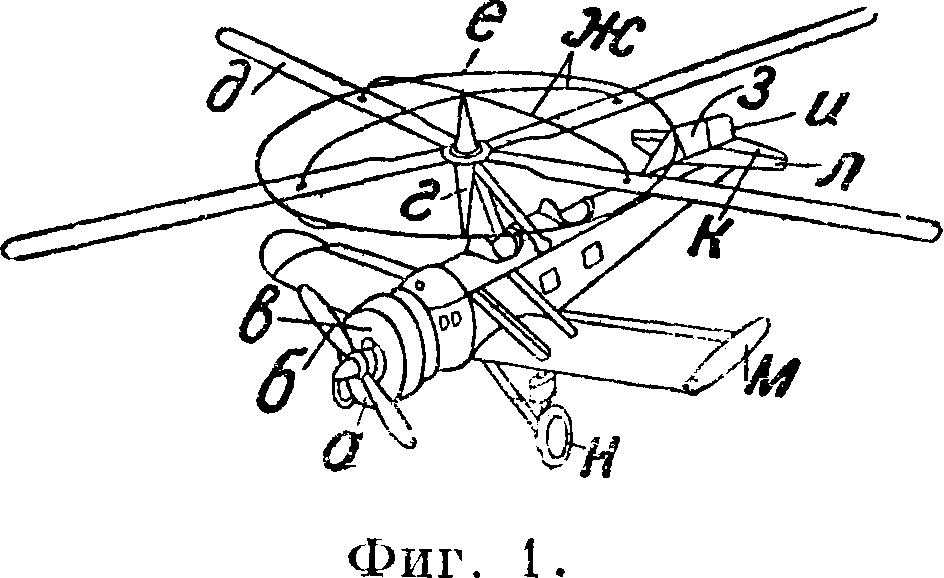
Автожир, летательный аппарат тяжелее воздуха, в котором в отличие от самолета подъемная сила создается с помощью вращающегося на вертикальной оси винта-ротора. За все время полета ротор вращается свободно от встречного потока воздуха. Поступательное перемещение получается с помощью мотора с обычным для самолета пропеллером. Основные части А. за исключением ротора, то есть его фюзеляж, шасси, оперение и управление, мало чем отличаются от самолетных. На фигуре 1 дана схема А. А-4, где а — мотор, б — винт, в — механический запуск ротора, г—втулка ротора, д—лопасти ротора, е— междулопастные расчалки, ж—поддерживающие расчалки, з—киль, и—руль поворота, к—руль высоты, л—стабилизатор, м—крыло с элероном, н—шасси. При косой обдувке винта окружная скорость допасти, идущей по движению, складывается со скоростью полета, а скорость лопасти, идущей против движения, равняется разности этих скоростей. Благодаря возникающей при этом разнице в подъемных силах лопастей, находящихся в различных угловых положениях, появляется поперечный момент, стремящийся опрокинуть винт. Этот момент возникает на всех винтах, имеющих жесткое крепление лопастей ко втулке (большинство геликоптер-ных винтов). У А. для ликвидации Этого момента лопасти ротора прикреплены ко втулке шарнирно т. о., что они могут под действием внешних сил свободно взмахивать вверх и вниз около шарнира с горизонтальной осью. Для уничтожения напряжений в лонжероне лопасти от изгиба в плоскости вращения в крепление лопасти ко втулке введен еще шарнир с вертикальной осью, относрггельно которого лопасть может свободно повертываться в плоскости вращения. В каждый данный момент при полете лопасти устанавливаются по равнодействующей подъемных и центробежных сил. Шарнирное крепле-ррие лопастей исклю-чает также возникновение на роторе жи-роскопических моментов. Небольшое крыло А. берет на себя на малых скоростях 7—8%, а на больших до 30% общей подъемной силы. Основным его назначением является нести на себе элероны, с помощью которых осуществляется поперечное управление аппаратом. Новейшие А., у которых в отличие от изображенного на фигуре 1 управление осуществляется не обычными для самолета органами, а наклонением в продольном и поперечном направлении оси вращения ротора (т. н. непосредственное управление), совсем не имеют крыла.
История. А. был изобретен испанским инж. Жуаном де-ла Сиерва в 1920 году Основной идеей изобретателя было создать летательный аппарат, для которого не была бы страшна потеря скорости и следующий за ней штопор. Им было построено несколько неудачных аппаратов, роторы которых имели разное число лопастей и конструкций, пока в 1923 году не было введено шарнирное крепление лопастей ротора ко втулке, обеспечившее успешные полеты А. Построив еще“ ряд А., Сиерпа в 1928 г. на А. С-8 совершил перелет из Парижа в Лондон и круговой перелет по Англии. В конце 1928 г. компанией Сиерва был построен А. С-19 М-II, имевший приспособление для раскрутки ротора перед полетом, требовавший в предыдущих конструкциях длительной рулежки перед разбегом. Это приспособление состояло в особом устройстве бипланного хвосторого оперения. При отклонении вверх руля и стабилизатора образуется коробка — «дефлектор», отражающая отбрасываемую винтом струю вверх на лопасти ротора. Следующая машина С-19 M-IV имеет уже механич. запуск ротора перед взле-
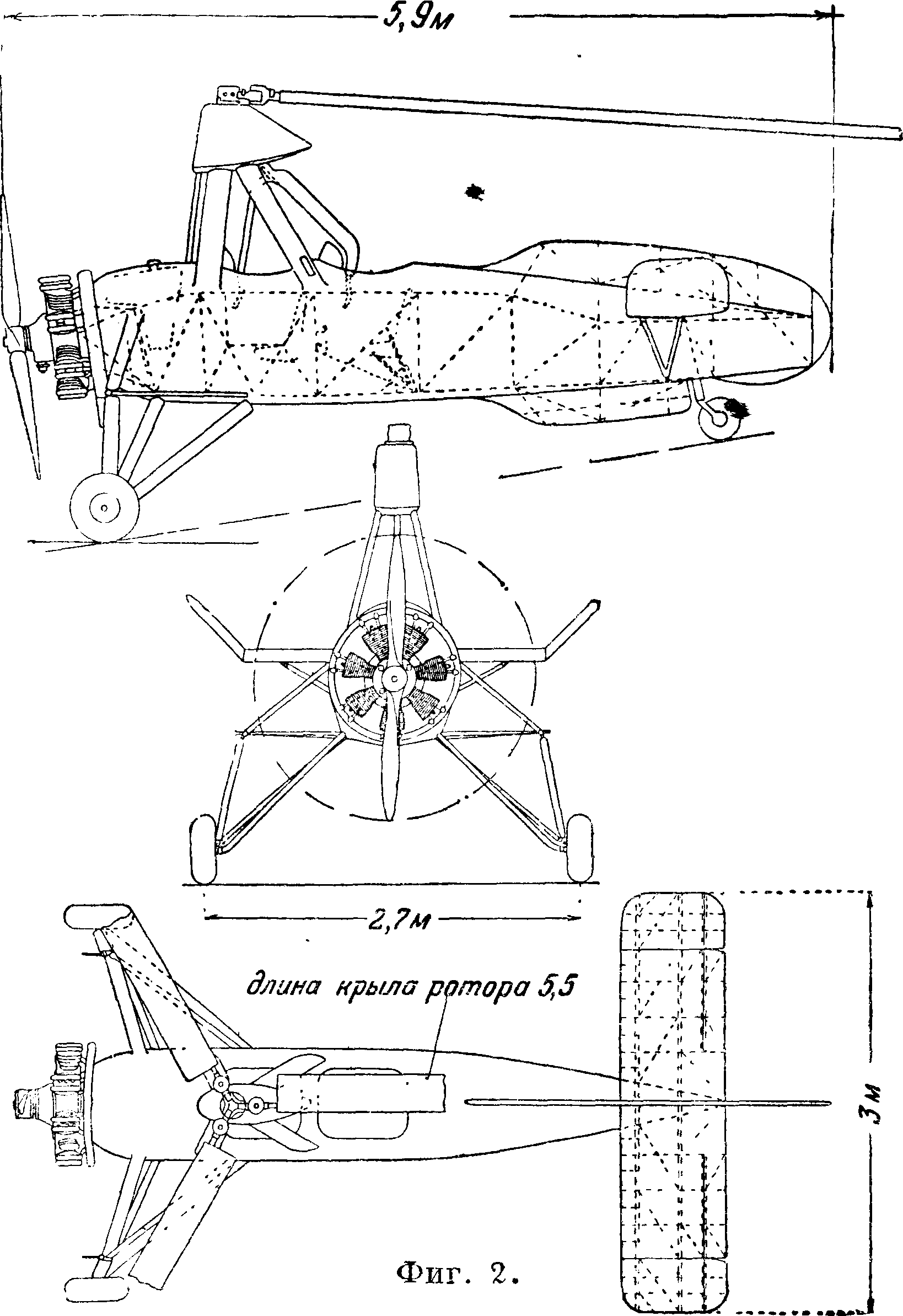
Т, Э. Доп. т. том от мотора, в дальнейшем целиком вытеснивший деф-лекторный. К 1933 г., то есть за 10 лет существования, было построено 130 А., которые налетали ок. 30 000 час., перевезя десятки тыс. пассажиров и покрыв более 4 000 000 км. В 1933 г. компанией Сперва построен и испытан бескрылый двухместный А. с непосредственным управлением С-30, который в 1934 году строился заводом де-Хавиланд (Англия! серийно под маркой С-ЗОР (фигура 2). В Со
ветском Союзе первый А. был построен в 1929 г. инже нерами Н. И. Камовым и II. К. Скрдаииским па средства Осоавиахима. Этот аппарат с мотором «Титан» 230 л. с. совершил ряд удачных полетов, показав скорость до 110 км/ч на высоте 450 метров.
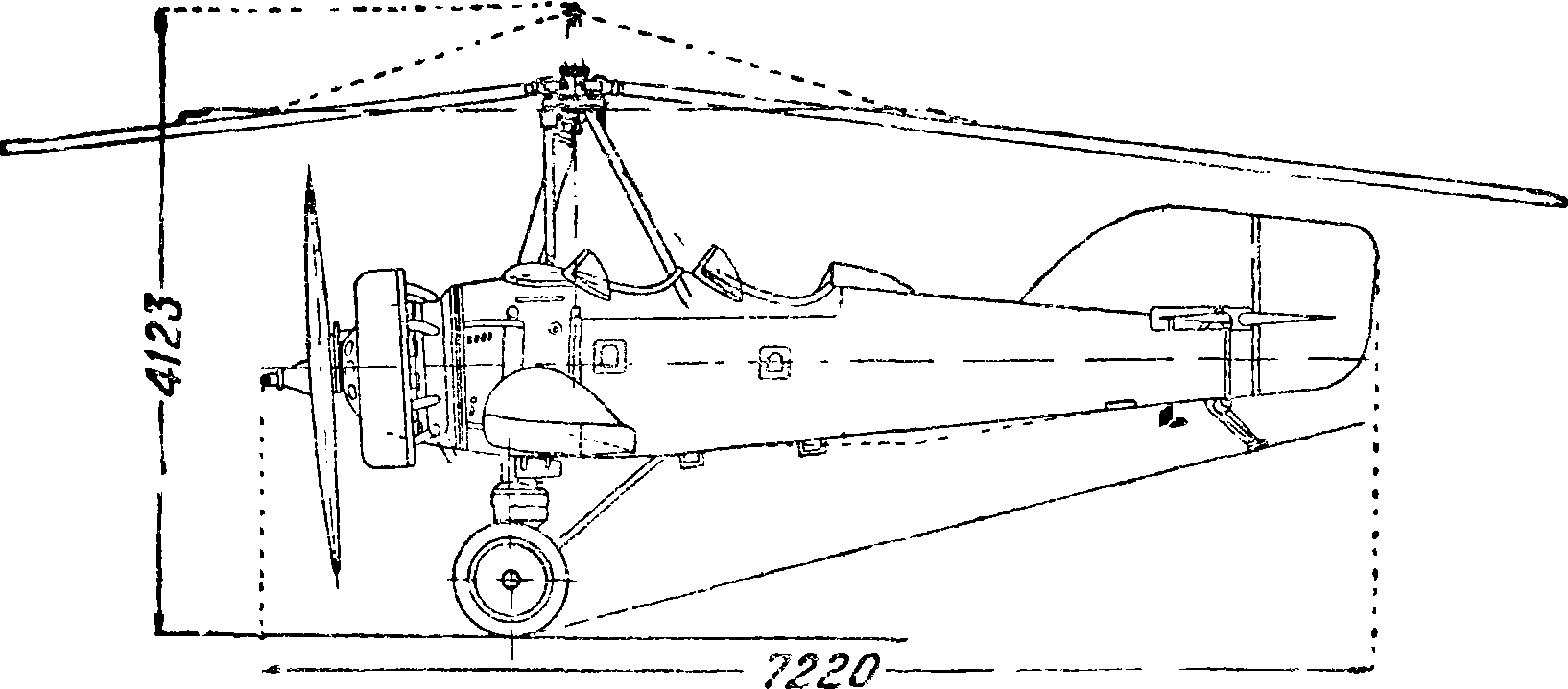
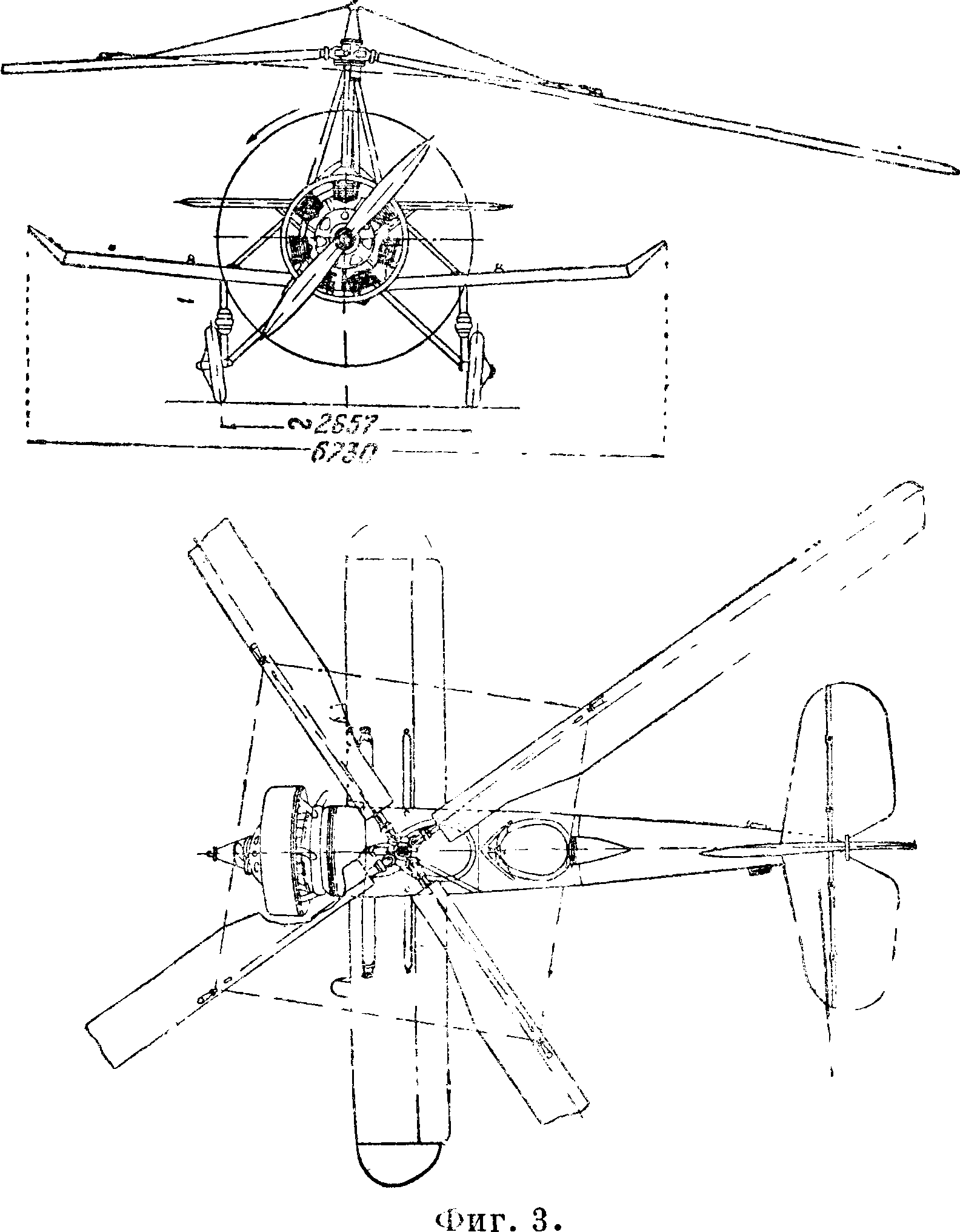
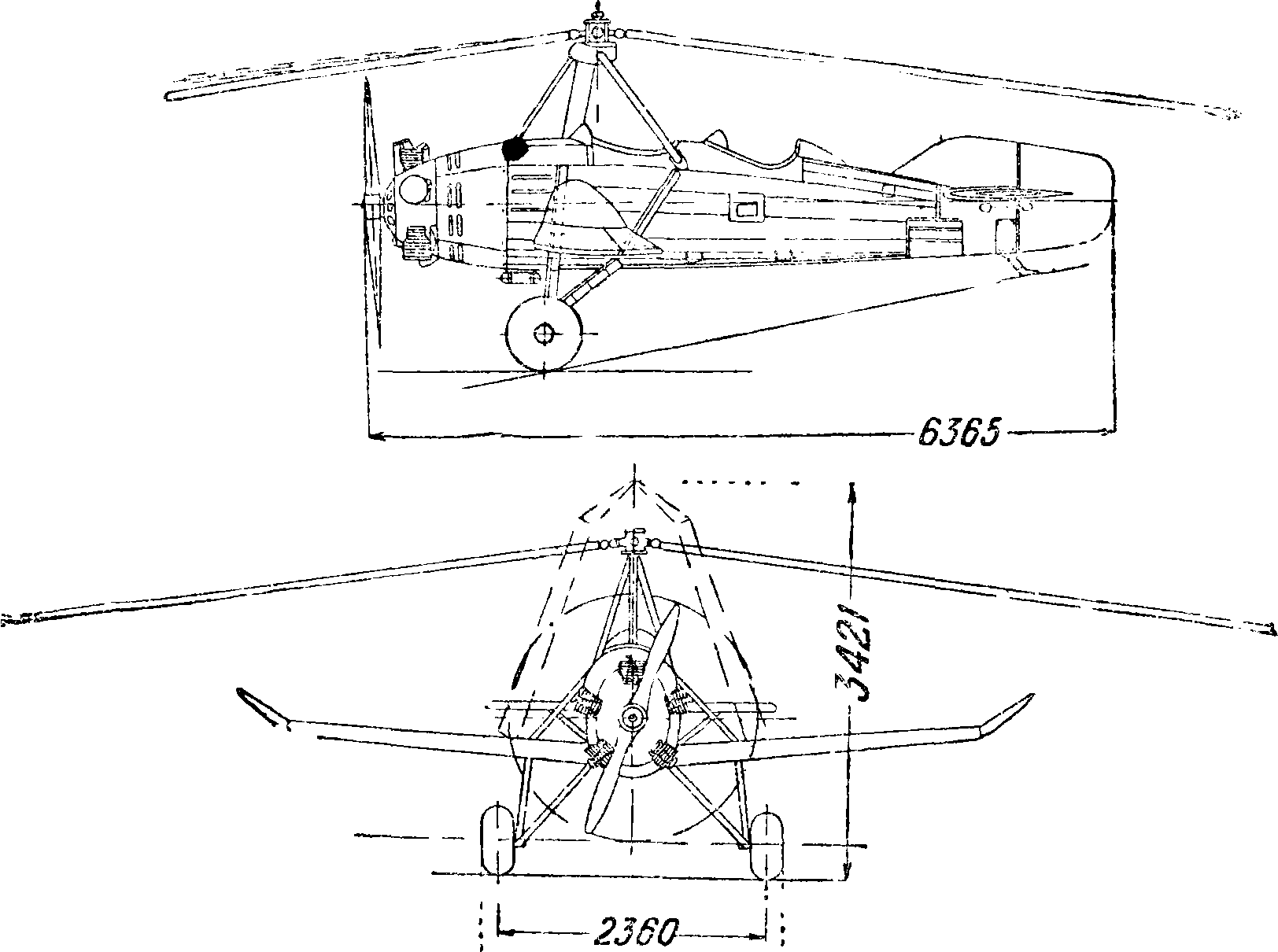
После ряда теоретич. и экспериментальных работ в 1931 г. ЦАГИ был построен А. 2-ЭА, показавший данные, не уступающие заграничным: максимальная скорость 160 км/ч, минимальная — 55 км/ч, потолок 4 200 метров В конце 1932 г. Отделом особых конструкций ЦАГИ был выпущен двухместный А. А-4 с мотором М-26 300 л. с., к-рый в 1933 г. выпускался небольшой серией (фигура 3). В том же году был выпущен двухместный А. А-6 с мотором 100 л. с., имеющий свободнонесущий 3-лопастный ротор. А. А-6 очень портативен, крылья его и ротор легко складываются (фигура 4). Этот А., как и А-4, снабжен механич. запуском и тормозом ротора. В 1933 г. выпущены А. А-7 с мотором 100 л. с. и А-8—экспериментальный аппарат с мотором 100 л. с., имеющий кроме обычных органов управления еще и управление с помощью наклона головки ротора. Ниже мы приводим конструктивные данные наиболее характерных А. (смотрите таблицу).
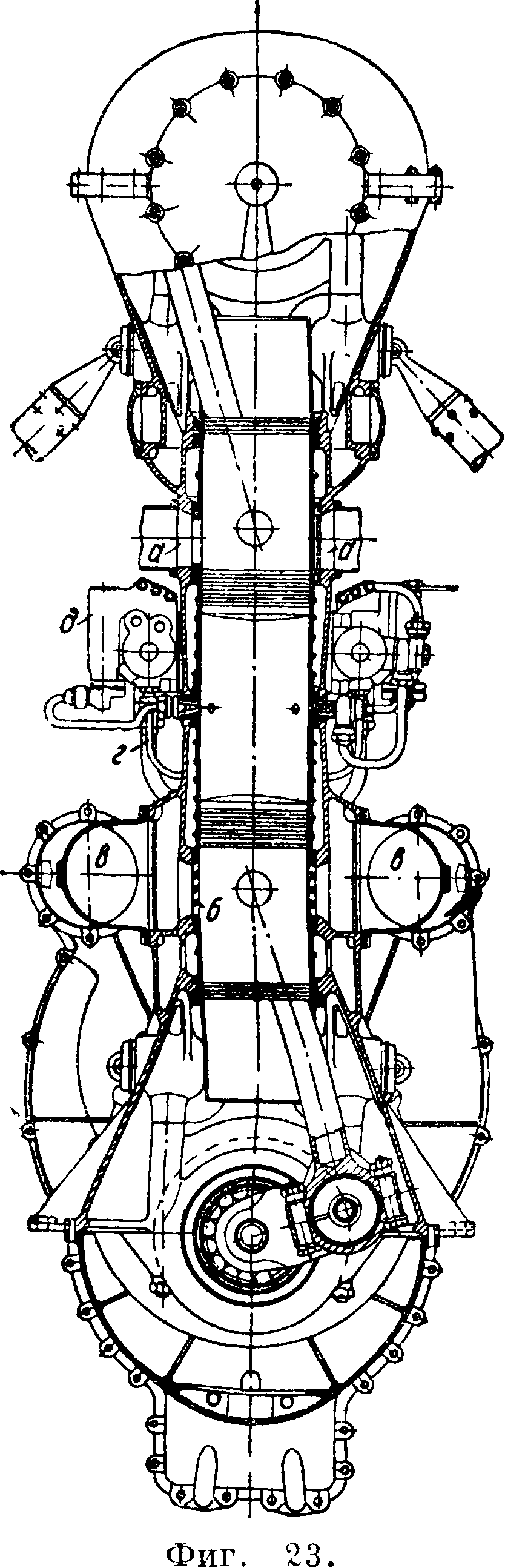
Конструкция А. На фигуре 5, А, Б, В даны основные детали А. С-30; на фигуре 5, А дан вид А., где а — вал запуска, б — бензиновый бак, е — муфта и редуктор, г — дроссель, д — совместное выключение запуска g тормозного колеса, е — замок ручки управления, жнз — регулировка поперечного и продольного управлений, и— колесный тормоз, включение и тормоз ротора, я—регулировка угла заклинения; на фигуре 5, Б изображена управляемая втулка, гдеаиб — вертикальный и горизонтальный шарниры лопасти, i—ручка управления, г и д—пружины продольной и поперечной регулировки, е — зубчатое колесо, ж — управление тормозом, a — поперечный шарнир, и — втулка механич. запуска, к — валик механич. запуска, л — фрикционный демпфер;
в
ООН
к я. - R и
Н×м д К (ч
3 В
и
Я
о
О
о И
E W
Б &
о
!§
Я К
И ί
Я I
а ! О i
§ E
π S
• В
§ ft ,J
«a
, i -
n ^ й
о И К
В и и о К >>* м го ft 1-4 Я и
* н ~
О с£ * V О ft ϋ
ft д о. Э а f- е В Я о
В О В В го д гС К ί
«в »
Е g
е“*
-в Н
а к Я ft а
в 03 0Е
| ю | ! | ||
| «сГ | «θ | ί
J |
| 1 833 | 1 350 | 820 | t>-
оо |
хС
Г- |
| Е-
<о Во ft N1 О ^ X! 1 |
«о
<N1 о А 1 |
β о
1 О |
Еч ft
О CD IgS В го1-"1 |
i Пуллин 50 |
ft
!>>
н в в
О О
К
η
и
«а“
о о 5rv
И
о
И
PU К QQ
ОСС
Ом
В ГО-Я Н°н В fto
Н О
о я»
<; С5 ^
в
Я ft В -Я и о в на фигура 5, В показаны: муфта включения а, редуктор б, включающий валик в, пружина включения г и рычаг включения д. Лопасти ротора (фигура 5, А) имеют обычно трубчатый лонжерон из хромомолибденовой закаленной стали с надетыми на него деревянными или металлич. нервюрами. Передняя кромка обшита фанерой или
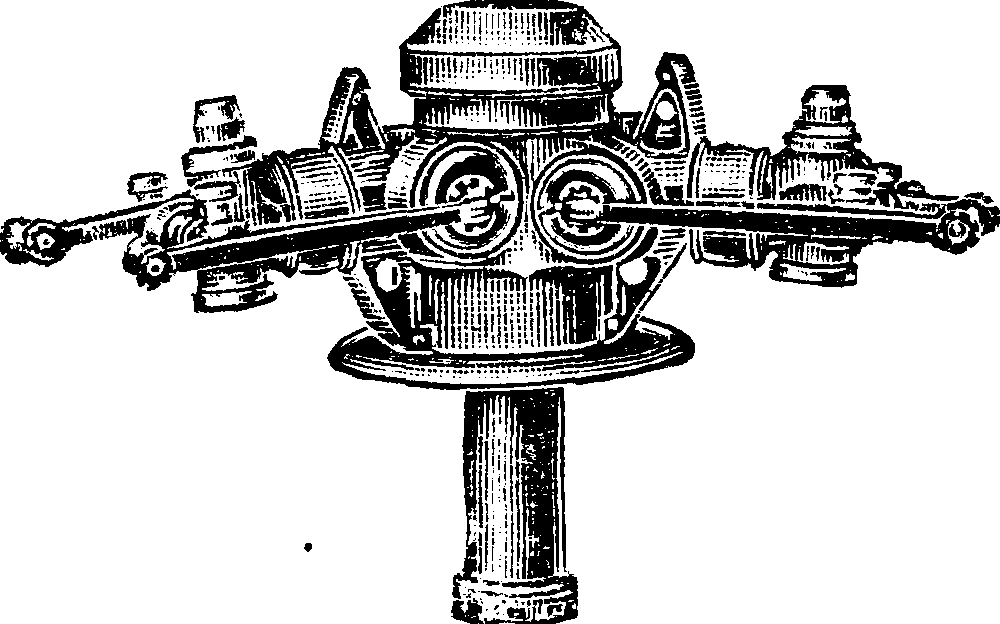
нира относительно оси вращения играют очень большую роль в обеспечении плавной работы ротора. Благодаря шарнирному креплению основной действующей на лопасть силой является центробежная сила (примерно в 10 раз превышающая подъемную силу лопасти), которая и является расчетной для нервюр и стрингеров. Расчетным для лонжеронов лопасти является случай изгиба при падении и ударе об ограничитель после случа ного поддува ветром на земле и случай кручения от инерционных сил в полете. Недостаточная жесткость лопасти на кручение кроме нежелательного увеличения угла закручивания вызывает вибрации и биение ротора в полете. Для обеспечения плавной работы ротора необходимо соблюдение полного подобия в расположении массы не только вдоль, но и поперек лопастей. Втулка ротора, вращающаяся на прикрепленной к кабану оси, имеет уши с шариковыми или обычными подшипниками, куда вставляются пальцы горизонтальных шарниров наконечников лопастей. Втулка имеет обычно два радиальных и один опорный подшипник, несущие на себе всю нагрузку. Материал втулки— высококачественная сталь. На фигуре 6 изображена втулка советского А. А-7, а на фигуре 5, Б—управляемая втулка A. G-30P. Последняя имеет 2 взаимно перпендикулярных шарнира а и б, откоеп-
*-66/2
дюралем, задняя образуется металлич. стрингером. Сверху лопасти обшиваются полотном и лакируются. В Англии делаются также лопасти сплошные из легкого дерева «бальза», причем лонжероны остаются в виде трубы. Лопасти расчаленного ротора (фигура 1) поддерживаются при стоянке на земле с помощью тросов, крепящихся к пилону, установленному на втулке, имея при этом угол свеса вниз 5—7°. Между собой они связаны «межлопастными тросами», включающими в себя резиновые амортизаторы и прикрепленными к лопастям с помощью фрикционных демпферов. Межлопастные тросы имеют назначение обеспечить равномерную раздачу крутящего момента на все лопасти при механич. запуске и других неустановившихся режимах работы. В отличие от расчаленного ротора сво-боднонесущий ротор (фигура 5) [например А-6 (фигура 4), С-ЗОР (фигура 2)] не имеет поддерживающих тросов, которые заменены ограничителем у корня лопасти, а также межлопастных тросов, замененных фрикционными л или иными демпферами у вертикального шарнира а, ограничивающими и смягчающими движения лопастей в плоскости вращения (фигура 5, Б). Надлежащая работа этих демпферов, а также положение вертикального шар-
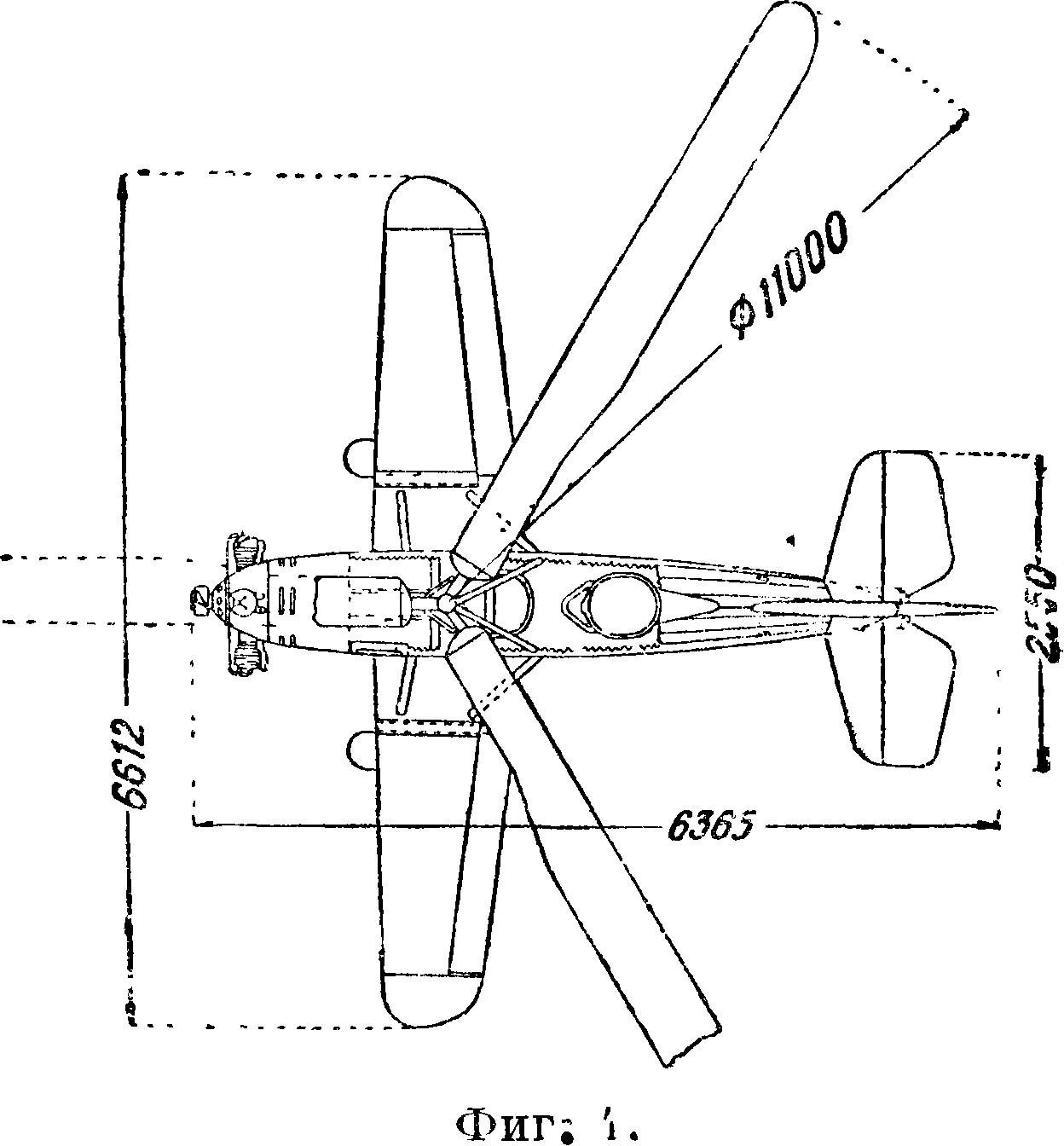
тельно которых она может поворачиваться. Положение втулки при нейтральном положении ручки управления в регулируется специальными пружинами гиб, которые также облегчают и упрощают управление аппаратом. Схема управления по-I казана на фигуре 7.
Шасси имеют широкую колей для придания аппарату большей устойчивости против поддува боковым ветром при посадке. Применяются масляная амортизация с большим ходом (120—150 миллиметров) и баллонные колеса (смотрите Самолетостроение). Угол выноса шасси, особенно у А. с непосред-
должна превосходить 0,8 от действительной площади лопастей. В целях обеспечения надлежащей продольной устойчивости А. крыло должно иметь центровку в пределах 25—35% средней аэродинамич. хорды. Отгибы на концах крыльев (фигура 1), служившие для увеличения поперечной статической устойчивости и противодействия боковому скольжению, на последних автожирах устранены, причем их действие компенсировано увеличением поперечного V крыльев до 8—10°. Стреловидность крыла назад в плане, выгодная
ственным управлением, очень велик (до 30°). Посадочный угол желателен не меньше 13°. Костыль, воспринимающий при крутой посадке большие нагрузки, выполняется обычно в виде колеса на стойке с масляной амортизацией. Для улучшения маневренности на земле, что важно в условиях неподготовленных посадочных площадок, он делается управляемым.
Оперение. Благодаря наличию ротора вертикальное оперение А. имеет малую высоту, а вместе с тем и небольшую эффективность в смысле устойчивости пути. Этот вопрос решается часто постановкой маленьких боковых килей на стабилизатор или же установкой бипланного вертикального оперения. Горизонтальное оперение А. отличается от самолетного лишь процентным соотношением между рулями и общей площадью оперения. Для А. этот процент доходит до 55. У бескрылого А. общая площадь горизонтального оперения несколько больше для создания достаточной поперечной статической устойчивости.
Крыло. Площадь его подбирается из условий постоянства оборотов ротора в полете и не конструктивно, м. б. полезна из соображений продольной и поперечной устойчивости. Все остальные агрегаты А. (фюзеляж, винтомоторная группа) ничем существенно не отличаются от таковых у самолета (смотрите Аэроплан и Самолетостроение).
Аэродинамика. На всех режимах полета обороты ротора остаются почти постоянными (для обычных конструкций 150— 160 об/мин.). Благодаря вращению ротора даже при больших углах атаки его, измеряемых между потоком и плоскостью, перпендикулярной к оси вращения, сечения лопастей работают на малых углах атаки. Отношение поступательной скорости к окружной скорости конца лопасти А меняется от 0 при вертикальном спуске до значения 0,5—0,7 при максимальных скоростях. Так. обр. даже при максимальной скорости полета внешняя половина лопасти, движущейся назад,
находится в условиях нормального обтекания. Устанавливаясь в каждый данный момент по равнодействующей всех сил, лопасти совершают маховое движение относительно оси горизонтального шарнира. Описываемый лопастями конус, так называемым «тюльпан>>, симметричен лишь при вертикальном спуске. При поступательном
Фигура 6
движении А. несимметрия скоростей в плоскости вращения (у лопасти, которая идет по движению аппарата, относительная скорость больше, чем у идущей против движения) вызывает несиммет-рию сил. Ось конуса наклоняется назад и в сто-
Продольное управление Поперечное управление
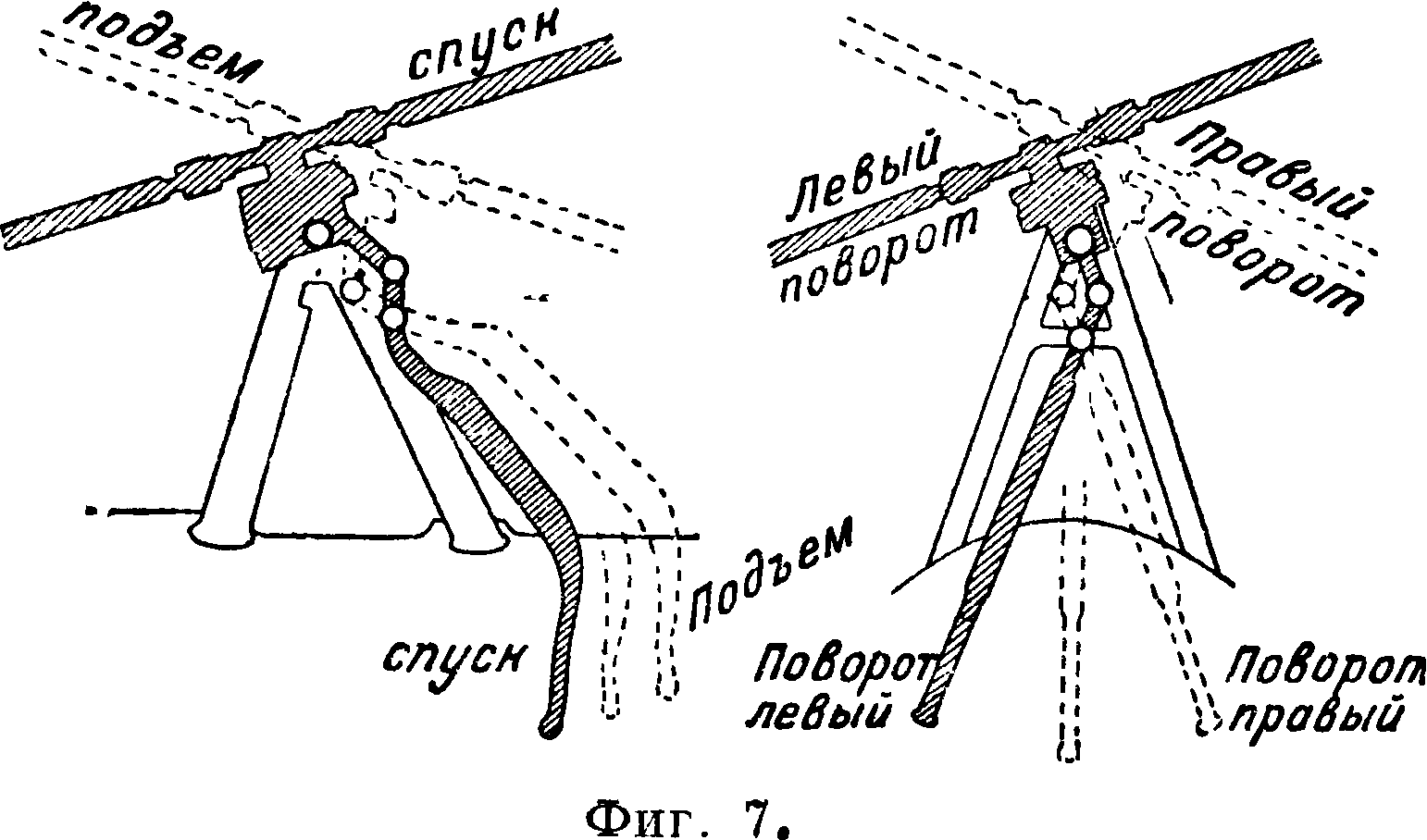
рону. Т. о. полная аэродинамич. реакция ротора имеет 3 компонента: тягу, направленную по оси вращения, продольную силу, перпендикулярную к ней и лежащую в направлении движения, и боковую силу, направленную в сторону лопасти, идущей вперед. Для компенсации этой последней в конструкциях А. ось ротора наклоняется несколько в противоположную сторону (на 1—2,5°). Для выявления причины авторотации ротора рассмотрим силы, действующие на элемент лопасти (фигура 8) при вертикальном спуске А. Истинная скорость, подходящая к элементу под углом атаки а, является равнодействующей окружной скорости и скорости протекания воздуха сквозь диск ротора. Полная аэродинамическая реакция h, как известно, будет отклонена назад от перпендикуляра к истинной скорости на угол y=arc tg -ρ-, то есть на угол обратного качества профиля. Как видим из фигура 8, сила R при проектировании на ось вращения дает силу Ρλ — элементарную тягу, а в плоскости вращения — силу L, которая вызывает вращение лопасти носком вперед. Установившееся вращение имеется тогда, когда сила R направлена по оси вращения. Однако при установившейся авторотации ротора это положение
Ось вращения ротора

Истинный угол атаки d
Угол уста- новый Θ
Плштст^ращения^ртора хорда профиля"^ лопасти
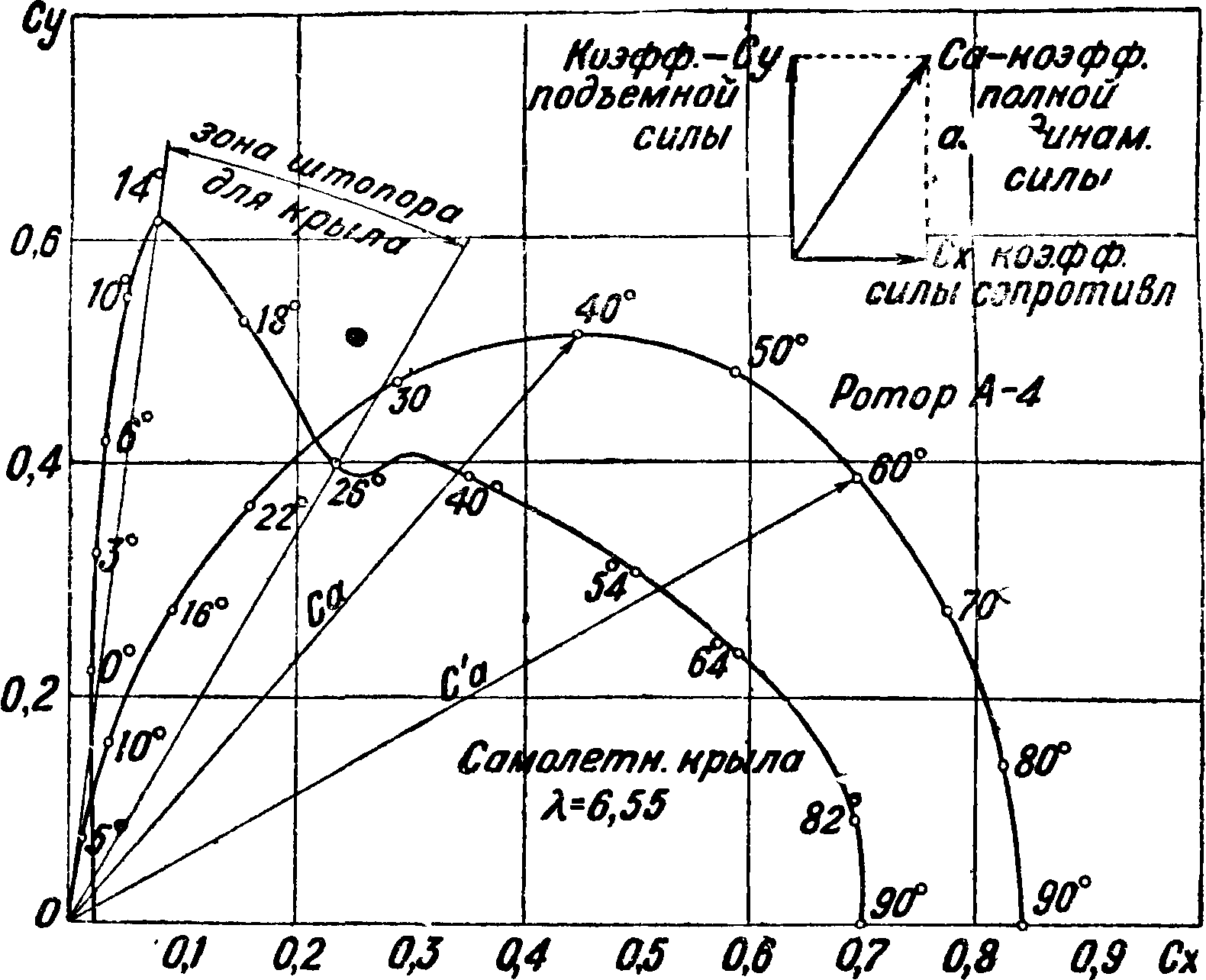
Вертим, сморость сквозь диен ротора имеется только в одном сечении лопасти, находящемся примерно на ~ R. На сечениях внутренней части лопасти равнодействующая наклонена вперед и создает крутящий момент, к-рый поглощается внешней частью лопасти, где равнодействующая отклонена назад. Если находящийся в состоянии установившейся авторотации элемент притормозить, то благодаря уменьшению окружной скорости угол атаки возрастает, равнодействующая наклонится вперед, и возни кает компонент, восстанавливающий вращение. Точно так же при ускорении вращения возникает затормаживающая сила, восстанавливающая состояние установившейся авторотации. Угол установки лопасти определяет собой угол атаки данного профиля для условий установившейся авторотации. Авторотация возможна лишь при узком диапазоне положительных углов установки лопасти, верхнее теоретич. значение которого для профиля Геттинген 429 0=7°. На фигуре 9 изображена аэродинамическая характеристика ротора; для сравнения нанесена характеристика крыла. Все коэф-ты для ротора отнесены не к действительной площади лопастей, а к площади ометаемого ими диска. Между тем мы видим, что максимальное значение коэф-та подъемной силы Су ротора близко к таковому для крыла. Если же Су отнесем к действительной площади лопастей, то его максимальное значение будет в 8—10 раз больше, чем таковое у крыла. Ротор не имеет режима срыва, наступающего у крыла при углах атаки 15—17° и обусловливающего штопор. Коэф. суммарной силы ротора с увеличением угла атаки постоянно возрастает.
Фигура 9.
Переходя на большие углы атаки (20—30°), А. спокойно переходит в крутое снижение с малой скоростью. Максимальное качество ротора около 8—10 (в зависимости от угла установки и коэф-та заполнения /с, то есть отношения действительной площади лопастей к ометаемой площади), причем качество прямо пропорционально первому и обратно пропорциональ- гно второму. Максималь- ^ Ί ное качество приходится на малые углы атаки, а следовательно и на малые значения Су, то есть на условия максимальной скорости (фигура 10). При размахе крыла, равном диаметру ротора, мощности, затрачиваемые на преодоление индуктивного сопротивления того и другого, а также на вредное сопротивление А. и самолета, могут считаться равными. Мощность же, затрачиваемая на преодоление Профильного сопротивления крыла, как известно, пропорциональна кубу скорости (Np=CpgSVz), а на преодоление профильного сопротивления ротора благодаря почти полному постоянству числа его оборотов на всех скоростях— только первой степени скорости. Т. о. надо полагать, что при небольшой нагрузке на лошадиную силу мотора, то есть При скоростном
| i | N | А | т | о | *3 | 5 | |||||
| ч | on | ю | 17 | А- | 4 | ||||||
| ч | < | ||||||||||
| < |
О° 10° 20° 30° 40° 50° cl Фигура 10.
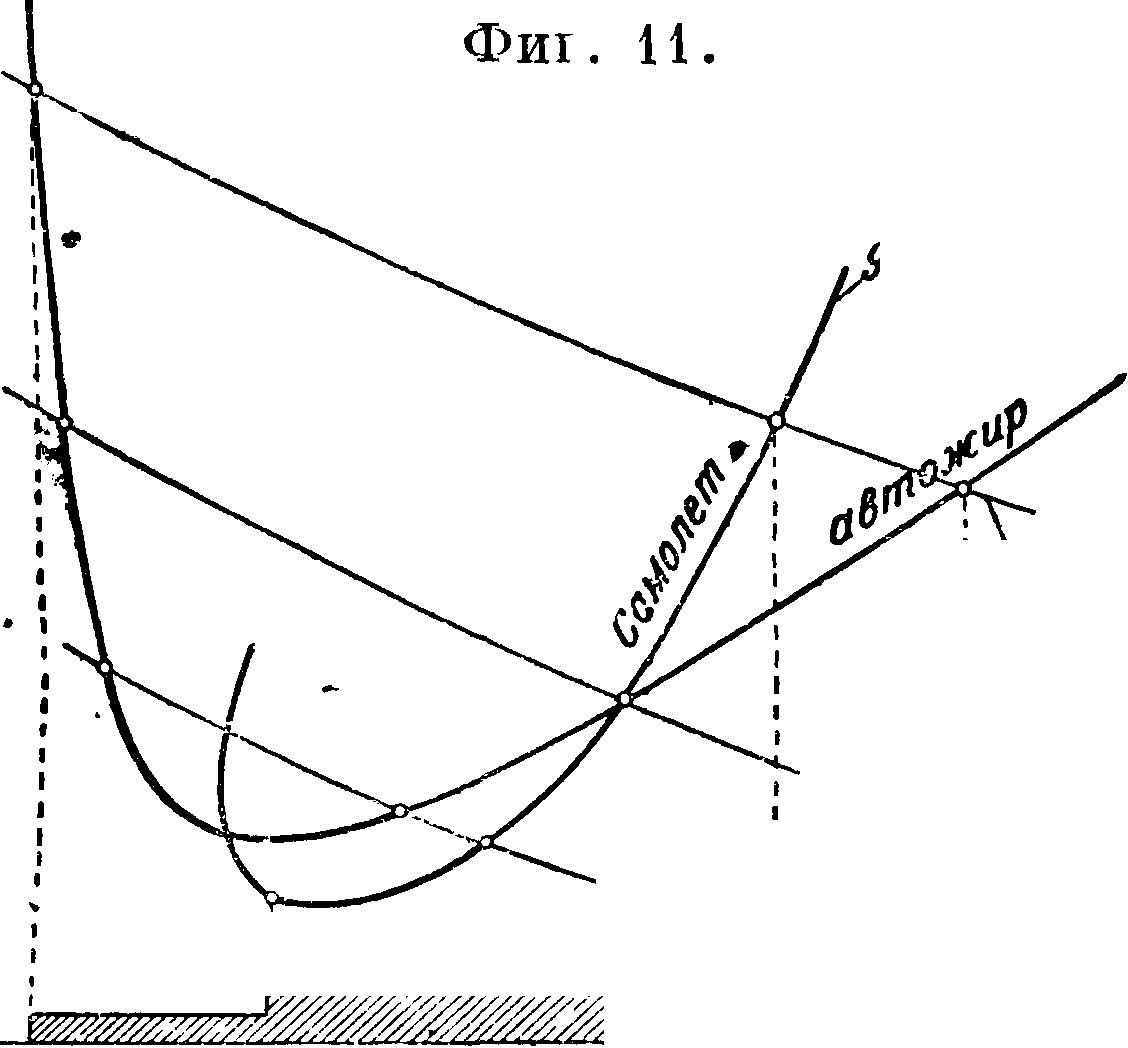
аппарате, А. при равном весе и мощности мотора будет иметь большую максимальную скорость, чем самолет. Это положение иллюстрируют приведенные на фигуре 11. кривые Пэно А. и самолета (смотрите Аэродинамикаή с
Фхг
Потребная гяга бинго тля горизонт, палета
Утш
, Л Тяга 6 метров гриппы i соответствующая 1 очень малой J нагрузке на 1 гг среди нагр. на 1 fP больш. Уагр. на I fP
уДиапазон скоростей горизонт, полета самолета отожира
Vmax
Укм/час
Летные характеристики А. вытекают из его аэродинамических характеристик: высокий коэф. подъемной силы делает возможным горизонтальный полет с очень малыми скоростями порядка 30—40 км/ч в то же время А. при небольшой нагрузке на 1 л. с. не уступает самолету в максимальной скорости. Диапазон скоростей А. достигает значений 5—б вместо 2,5—3 для самолета. Возможна очень крутая траектория снижения вплоть до вертикального спуска, скорость которого, замеренная в летных испытаниях, составляет 10 м/ск. Кроме того А. имеет возможность планировать полого, по-самолетному. При соответствующей раскрутке ротора перед стартом А. имеет очень короткий разбег (порядка 25—40 метров и меньше), разбег А. С-30 с непосредственным управлением равен 11 метров Это условие вместе с возможностью посадки без пробега чрезвычайно сокращает размеры потребного аэродрома, позволяя А. работать в условиях неподготовленных посадочных площадок. Так как качество ротора ниже качества крыла, А. обладает худшей (примерно на 15%) скороподъемностью и более низким потолком, чем самолет. Однако в угле взлета он не уступает, а иногда и превосходит самолет, т. к. у А. скорость по траектории значительно меньше. Безопасность А. характеризуется гл. обр. невоз-. можностыо штопора, отсутствием явления потери скорости, нулевой посадочной скоростью. В неспокойном воздухе он более устойчив, чем самолет, благодаря инерции вращающихся · лопастей. Управление А. проще управления самолета; это качество особенно ярко проявляется у бескрылого А. с непосредственным управлением. Хорошая маневренность А. определяется гл. образом широким диапазоном скоростей, более плавной передачей перегрузки на корпус и малым моментом инерции аппарата относительно вертикальной оси. Необходимо „отметить, что все специфические характеристики А. нашли свое наиболее яркое выражение в автожире с непосредственным управлением. Этот последний имеет: более короткий разбег за счет увеличения угла атаки ротора при подрыве; большую безопасность от опрокидывания боковым ветром при посадке благодаря возможности быстро погасить подъемную силу ротора, соответственно наклонив его; полную управляемость на малых скоростях, где обычное самолетное управление мало эффективно; возможность чисто вертикаль ного спуска, доступного обычному А. далеко не при всякой центровке, и целый ряд других преимуществ. Именно этому типу А. принадлежит будущее.
Применение. Не конкурируя с самолетом во всех областях применения, А. найдет себе целый ряд новых областей, недоступных обыкновенному самолету. Широкий диапазон скоростей и исключительные взлетно-посадочные качества позволяют А. хорошо работать в условиях сильно пересеченной местности. Возможность посадки на пахоту, взлета с небольшой лужайки, простота в управлении сделают его ценным аппаратом для исполкомовской авиации. Для аэрофотосъемки А. открывает новые перспективы благодаря возможности полета на малых скоростях. Он м. б. также с успехом использован для аэросева и борьбы с вредителями с. х-ва. В США А. используются для борьбы с лесными пожарами, для туризма и для несения полицейской службы. Военное применение А. также имеет весьма широкие перспективы: замена А. змейковых аэростатов для наблюдения и корректировки стрельбы, для целей сопровождения самолетов и ближней разведки, для сопровождения военных судов и борьбы с подводными лодками. Помимо этого имеется вероятная возможность применения А. как скоростной и маневренной машины в роли истребителя.
Лит.: Братухин И., Автожиры, М.—Л., 1934; его же, Теория ротора автожира, «Техника воздушного флота», М., 1933, 7; е г о же, Аэродинамический расчет автожира, там же, 1934, 3; Миль М., О разбеге автожира, там же, 1934, 5; е г о ж е, Продольная балансировка и устойчивость автожира, «Техника воздушного флота», 1934, 9; Кузнецов В. и М и л ь М., Экспериментальный аппарат ЦАГИ 2ЭА типа автожир, там же, 1933, 5; G 1 a u е г t, A General Theory of the Autogyro, «Rep. a. Mem.», Wsh., 1111; Lock, Further Development of Autogyro Theory, ibid., 1127; Glauert, Lift a. Torque of an Autogyro on the Ground, ibid., 1131; Bennett J., Liber den Flug cines Autogyro mit grosser Geschwindigkeit, «ZFM», 1933, 17; Bennett J., tfber den senkrechten Abstieg eines Autogyro, ibid., 1932, 8; Schrenk M., Die aerodyna-mischen Grundlagen der Tragschraube, ibid., 1933, 15, 16, 17; Larsen, Engineering Aspects of the Modem Autogyro, «Journal of the Society of Automative Engineers», N. Y., 1932, v. 30, 6; Lock a. Towend, Wind Tunnel Experiments on a Model Autogyro at Small Angles of Incidence, «Rep. a. Mem.», Wsh., 1154, «Technical Report NACA», Wsh., 427 (реферат В. Квашнина, Испытания американского автожира, «Техника воздушного флота», М., 1933, 7); Whe аЧ ley J., Wing Pressure Distribution a. Rotor Blade Motion of an Autogyro as Determined in Flight, «Technical Report NACA», Wsh., 475. Конструкция и эксплоатания: С к р ж и н с к и и Н., Автожир А-4 ЦАГИ, Москва—Ленинград, 1934; Brie R., The Autogyro and How to Fly it, London, 1933; «Aeronautical Engineering», 1932, v. 4, 4; С к p ж и ii с к и и Н. и М и л ь М., Опытный автожир А-4 конструкции НАГИ, «Техника воздушного флота», Москва, 1933, 10; Три коммерческих автожира; «Aviation», New York, 1931; Autogyro, «The Aeroplane», London, 1934, 5. M. Миль.