 > Техника, страница 95 > Аэрофотосъемка высотно-стереоскопическая
> Техника, страница 95 > Аэрофотосъемка высотно-стереоскопическая
Аэрофотосъемка высотно-стереоскопическая
Аэрофотосъемка высотно-стереоскопическая имеет своей задачей составление по аэрофотоснимкам чертежного плана с рельефом. Отличием от контурно-комбинированной аэрофотосъемки (смотрите) служит то, что рельеф наносится камеральным путем и что конечной продукцией А. в.-с. является план в ортогональной проекции вместо центральной, получаемой на фотоплане. Эта вадача выполняется лишь при том условии, что в результате измерений по аэрофотоснимкам мы получаем три координаты каждой точки, т. e. А, Y и Z, где×и Y являются плановыми координатами, a Z— высотой. Измерения на одном снимке могут дать только две координаты я и у, а потому для получения третьей координаты необходимо произвести какие-то - независимые измерения, которых нельзя получить на том же снимке. Для этих измерений должен обязательно быть снимок того же участка местности,
но снятый при другой экспозиции, когда изменилась точка стояния самолета и переместилась в пространстве узловая точка объектива. Это условие подтверждается и геометрия, представлениями. Пусть (фигура 1) местность ABCD бы-
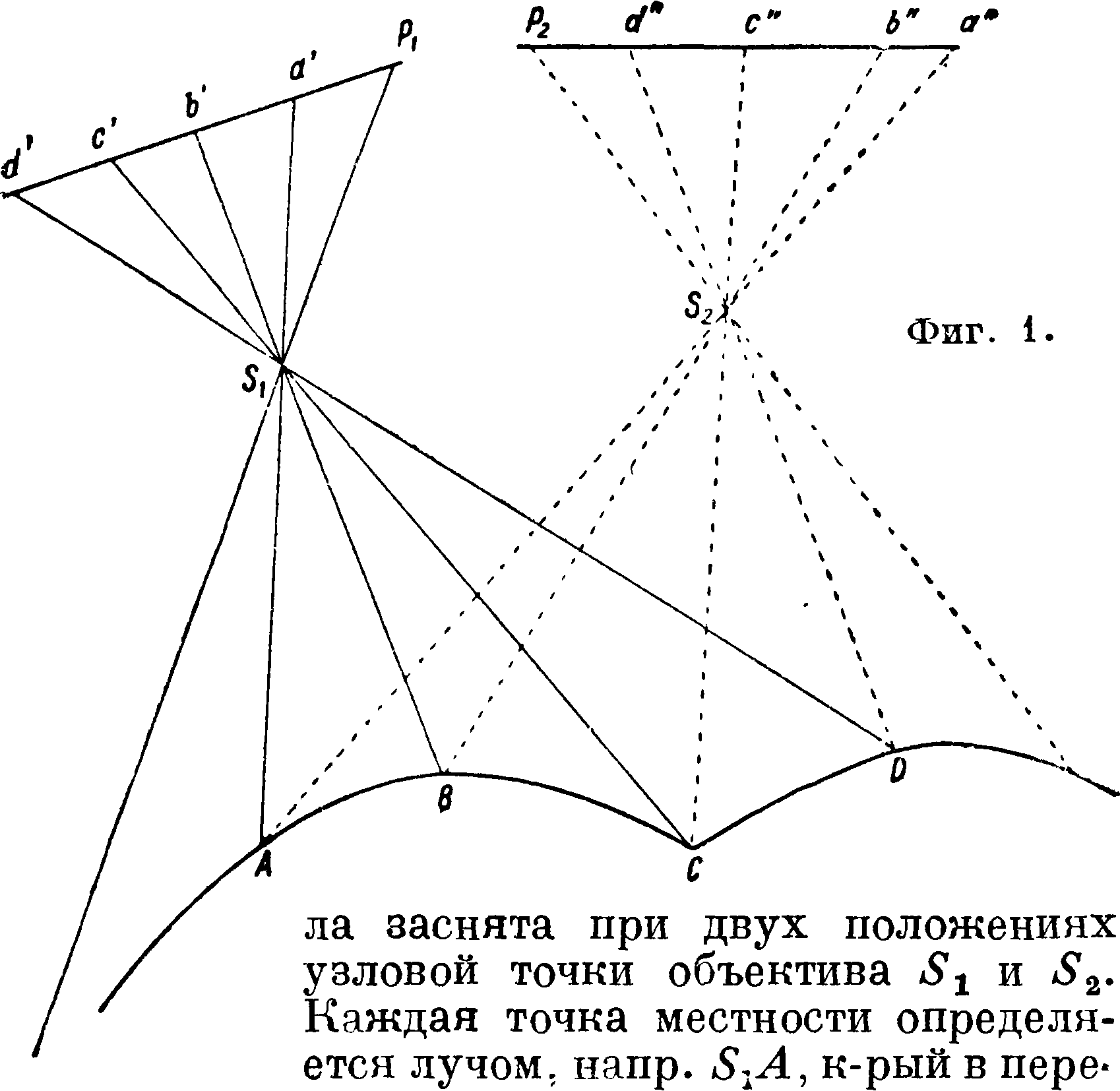
сечении с плоскостью снимка дает изображение в точке а". Очевидно, что если поставить снимок в то же положение относительно местности, к-рое он занимал в момент экспозиции, и спроектировать его на горизонтальную плоскость Q, то пересечение лучей с этой плоскостью даст трансформированную центральную проекцию местности (смотрите Фототрансформирование), не дающую суждения о высотах точек. Именно таким образом разрешает задачу контурная аэрофотосъемка. Если ориентировать в пространстве пару снимков Рг и Р2 и спроектировать, то лучи, идущие на одни и те же точки местности, взаимно пересекутся на определенных расстояниях от центров проектирования и дадут т. н. модель местности. При данном положении экрана, на который проектируются оба изображения, можно наблюдать на его плоскости пересечения ряда точек, лежащих на одной высоте. Перемещая экран вверх— вниз, можно легко менять сечение горизонталей, т. к. с новым положением будут совпадать уже другие пересечения. Для того чтобы правильно поставить оба снимка в то положение, которое они занимали в момент съемки, требуется знание т. наз. элементов ориентирования. Эти элементы характеризуют, с одной стороны, конус лучей внутри самой камеры аэрофотоаппарата, а с другой стороны, положение конусов лучей обоих снимков относительно пространства. Первому условию удовлетворяют элементы внутреннего ориентирования, к которым относятся фокусное расстояние камеры аэрофотоаппарата и положение главной точки (основания перпендикуляра, опущенного из узловой точки объектива на плоскость снимка). Второму условию соответствует знание элементов внешнего ориентирования; трех координат (X, У, Z) одной из точек, стояния; величины и направления линии, соединяющей обе точки стояния и называемой базисом фотографирования; азимутов aytуглов наклона оптич. осей обеих камер и углов поворотов κ обоих снимков в своих плоскостях. Часто при А. в.-с. предварительно находят элементы ^ взаимного ориентировавши, которые
Т. Э. Доп. т.
7
определяются направлением базиса и разностью углов ау1—ау2)со1—ω2κκ1—κ2. После этого, зная элементы внешнего ориентирования одного из снимков, можно легко определить соответствующие элементы другого снимка. Основными элементами работы по А. в.-с. являются: аэросъемочные (летно-съемочные) работы, полевые геодезии. измерения и камеральные (фотограмметрические) работы.
Аэросъемочные работы мало отличаются от таковых же при контурной аэрофотосъемке за исключением выбора положения оптической оси камеры. Это положение оптич. оси м. б. совершенно произвольным, но в настоящее время на практике применяются только нек-рые заранее выбранные случаи. На фигуре 2 показан
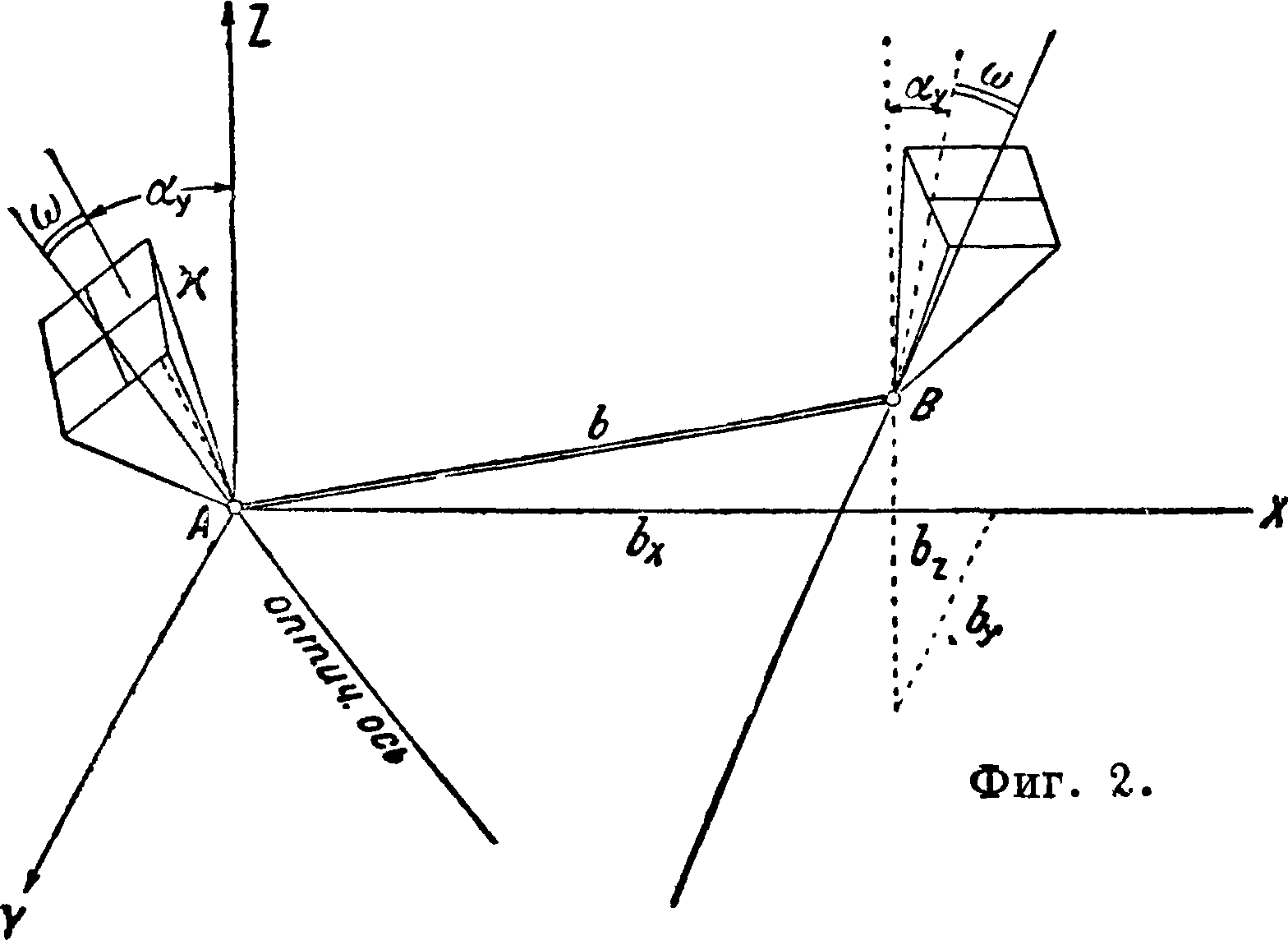
общий произвольный случай положения оптич. оси, когда каждая камера имеет все углы ауи κ не равными нулю и когда базис направлен не вдоль оси хх, то есть так, что он м. б. спроектирован на три оси координат. Необходимо отметить следующие случаи съемки. 1) Верти-кально-парал л«е льная съемка: а^=0, ауя=0, ωΑ—0, сор=0, κ^=0, κΒ=0 здесь мы имеем дело с вертикально направленными оптич. осями. Для высотных целей м. б. обработана перекрытая зона снимков, что заставляет во избежание разрывов делать перекрытие не меньше 60%. 2) Вертикально-конвергентная съемка: ауА — 0, ауВ=0, соА—0, ω5=0, κ^=0, κ5=0; в этом случае оптич. оси будут непараллельны друг другу, и угол у, образованный ими, носит название угла конвергенции. Очевидно, что у — ауА + ауВ. Наклоны оптич’ осей направлены по направлению полета, а потому почти не увеличивают ширину снимаемой полосы местности. Для аэро-фотосъемочных работ при вертикально-конвергентной съемке пользуются двухобъективными аэрофотоаппаратами, в которых оптич. оси сходятся под заданным углом у. В настоящее время в двухобъективных аэрофотоаппаратах применяется конвергенция в 30—40°. Для обработки служат стерео
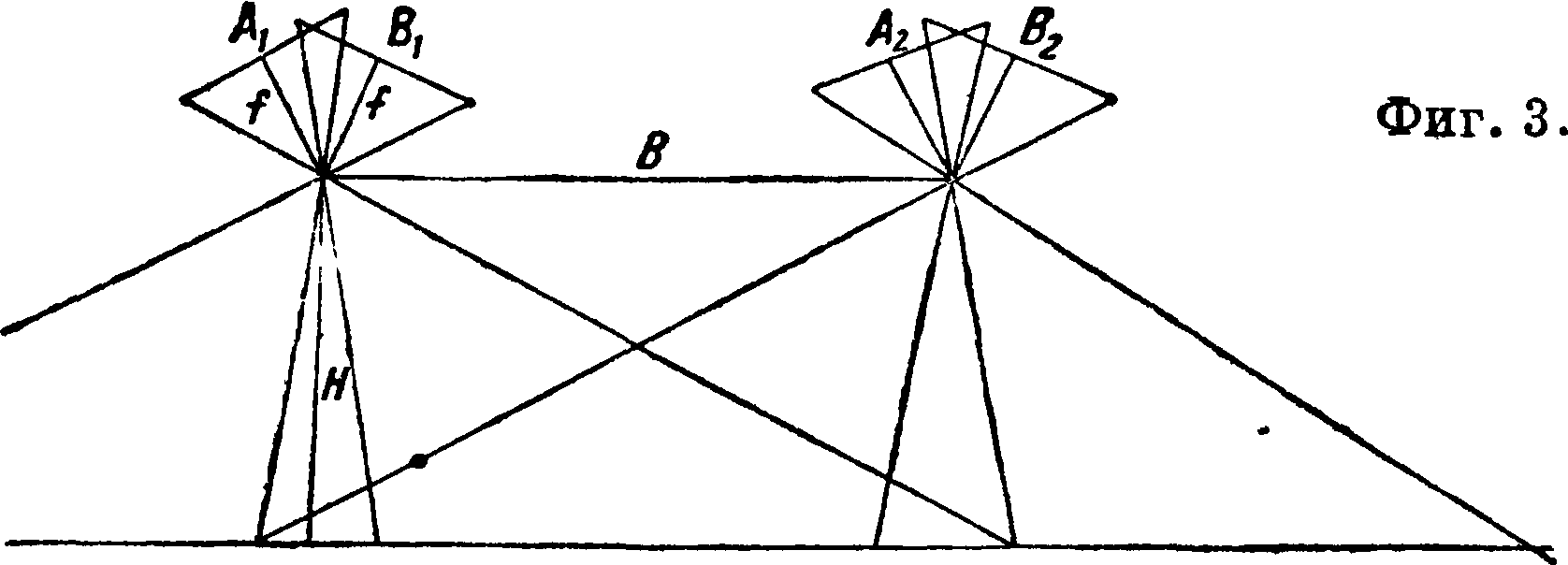
пары, образованные снимками Ах и В2 (фигура 3), снятыми с различных точек стояния и имеющими между собой 100% перекрытия. Этот вид съемки имеет наибольшее значение вследствие значительной величины перекрытой площади и вследствие выгодности при дальнейшей обработке.
3) Перспективн о-к онвергентная съемка: ауА — 0, ауВ — 0, ωΑ=0, ω5—0, κΑ=0, κΒ=0. 4) Перспективн ο-π араллель-н а я съемка: ауА—0, ауВ—0, ω^=0, ω5—0, κΑ—0, κΒ=0 здесь наклон оптич. оси задан в направлении, перпендикулярном к направлению полета, что дает значительное уменьшение числа маршрутов. Однако ряд неудобств в обработке как в этом, так и в предыдущем случаях не дал им широкого распространения.
Во всех рассмотренных случаях принималось, что bх—bу bу—0 и Ьг=0, то есть что базис фотографирования совпадает с осью X. Вычисление расстояния между маршрутами производится так же, как и в контурной аэрофотосъемке, причем сперва производится вычисление координат заснимаемой площади по ф-лам:
sin GLy cos ω -f у sin Оу sin CD -f x cos ay
X=H —:---:--:,
COS a^cos ω + У COS a у Sin ω — x Sin ay у COS au — f sin ω
Y TT _z__
1 П 1 COS ay COS w + y COS ay sin ω —X siП ay
(x,y — координаты на снимке, Η — высота полета, /—фокусное расстояние). Рассчитав перекрытие и высоту полета и произведя аэрофотосъемочные работы, необходимо перекрытые зоны обеспечить достаточным числом геодезич. точек, после чего негативы поступают для камеральной (фотограмметрической) обработки.
Камеральная обработка в настоящее время ведется тремя путями, отличающимися друг от друга как методикой работы, так и применяющимися приборами. Эти применяемые методы следующие: 1) диференцированный ме тод, получивший законченную производственную форму в работах амер. фирмы Брок; 2) метод двойного проектирования, развитый в конструкциях Гассера и Нистри; 3) метод непосредственного измерения направлений, имеющий наибольшее распространение и отразившийся в целом
Ёяде конструкций (стереопланиграф Бауэрсфельд-[ейсса, аэрокартограф Гугерсгофа, автограф Вильда, стереотопограф Пуавилье и прочие).
Диференцированный метод по способу Брока заключается в том, что вся камеральная работа по получению ортогонального плана дифе-ренцирована на ряд самостоятельных процессов, выполняемых на различных приборах, а не производится на одном приборе, как это имеет место при других методах. Эти процессы следующие: определение по паре снимков элементов внешнего ориентирования, трансформирование аэроснимков по полученным элементам и рисовка рельефа. В способе Брока пользуются снимками вертикально-параллельной съемки, то есть имеющими лишь случайные углы наклона оптической оси, происшедшие из-за колебаний самолета в полете. С негативов делаются диапозитивы, которые увеличиваются вдвое по сравнению с оригиналом для увеличения точности работы. Увеличенные диапозитивы вкладываются в специальный стереокомпаратор, на котором производят измерения горизонтальных параллаксов шести точек, расположенных, как по-
о о о о о о,
_____________j
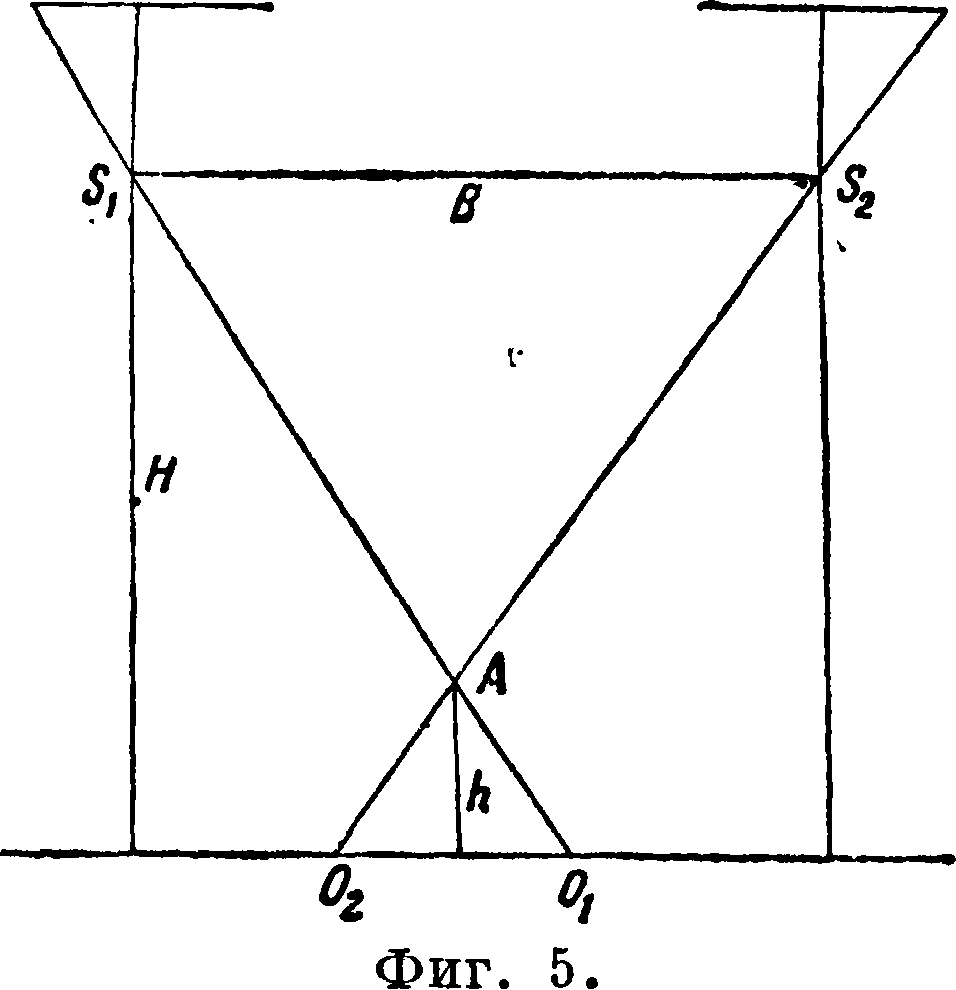
казано на фигуре 4, и имеющих высоты, полученные из полевых геодезич. измерений. Т. к. во время съемки имелись случайные отклонения оптич. оси от вертикали, то каждый отрезок на снимке будет искажен, что вызовет и соответствующее искажение горизонтального параллакса, т. к. он выражается ф-лой р—х2—хг) где х2 и хг— отрезки между соответствующими точками на двух снимках, спроектированные на ось XX, За ось XX принимается линия, соединяющая точки надира обоих снимков (или при малом отклонении оптич. оси — линия, соединяющая главные точки). Зная высоты этих же точек, легко вычислить горизонтальный параллакс, долженствующий быть при вертикальном положении оптич. оси. Соответствующая формула найдется из подобия тр-ков А и 0Х02 А (фиг, 5), где Sx и Sа — узловые точки объективов при двух экспозициях, находящиеся на высоте Н над средней плоскостью, В — базис фотографирования, aS’jOx и S202— направления визирных лучей на одну и ту же точку местности h, лежащую на высоте h над средней плоскостью;
тогда р=Вычислив по этой формуле гори зонтальный параллакс, можно сравнить его с измеренным и получить искажения для всех шести точек. Эти искажения будут вызываться наклоном оптич. оси, а потому, зная их, можно вычислить наклон и другие элементы внешнего ориентирования. Пользуясь специальным фототрансформатором (смотрите), к-рый снабжен точными шкалами для установки элементов внешнего ориентирования, можно странсформировать снимок на диапозитивную пластинку, все точки которой будут исправлены от искажений за наклон оптич. оси. Влияние разности высот точек стояния (то есть ΔΗ—ΗЯ2) исправляется промером на местности в начале и конце маршрута специальных базисов и сравнением масштабов снимков между собой, как это имеет место при приведении снимков к одному масштабу (смотрите Фотоплан, т. XXY). После этого диапозитивы, исправленные за масштабные и угловые искажения, закладывают в стереокомпаратор и на них от руки наносятся горизонтали. Полученные диапозитивы не представляют собой ортогонального плана, а несут ошибку за центральную проекцию, т. к. каждый участок местности, находящийся между двумя горизонталями, получен в другом масштабе (как
известно, но с переходом к другой гори зонтали высота самолета Н над плоскостью, образующей эту горизонталь, будет H—hi а потому Мг=-jfzrfi > что учитывается и в контурной аэрофотосъемке трансформированием на различные плоскости). Для исправления этой ошибки фирмой Брок построен прибор, проектирующий изображение на планшет. Перекопировав ситуацию внутри одной горизонтали, изменяют масштаб соответственно приведенной формуле и переходят к участку внутри следующей.
Недостатком описанного способа является большое количество геодезических работ, так как на каждую пару необходимо шесть опознанных и снабженных высотами точек, не считая геодезической подготовки для определения масштаба. Ряд работ советских и иностранных ученых показал возможность и других решений задачи диференцированным методом. Так например, возможно, измеряя вертикальные параллаксы пяти точек, высоты которых неизвестны, определить элементы взаимного ориентирования двух снимков и, определив заранее элементы внешнего ориентирования первого снимка, получить ориентировку в пространстве второго снимка. Продолжая таким же образом передачу ориентирования со второго снимка на третий и т. д., теоретически возможно ограничиться полеврй геодезич. работой лишь для первого снимка, но возникающие ошибки начинают сильно искажать получаемый результат, а потому необходимо довольно часто давать геодезич. опору. Произведенные исследования говорят о возможности применения «метода продолжения» для пяти снимков. Второй возможный вариант определения элементов ориентирования заключается в использовании фотоизмерительного теодолита (смотрите ниже). Этими работами значительно упрощается геодезич. подготовка, благодаря чему возрастает рентабельность диференцирован-ного метода.
Метод двойного проектирования заключается в том, что весь негатив проектируется на экран, на к-рый одновременно проектируется изображение и второго негатива. Для осуществления этого метода сконструированы специальные приборы (Гассера, фотокартограф Нистри, аэросимплекс Гугерсгофа), которые в основном представляют собой как бы соединение двух трансформаторов с одним общим экраном. Наибольшее производственное значение имеет фотокартограф Нистри, применяющийся в Италии. Фотокартограф предназначен для обработки вертикально-параллельной съемки, причем для сохранения конгруэнтности связки проектирующих лучей в приборе осуществлен принцип Коппе, то есть фокусное расстояние каждой камеры прибора в точности равно фокусному расстоянию аэросъемочной камеры. Принципиальная идея прибора заключается в том, что две камеры, установленные в то же положение, к-рое занимали съемочные камеры в момент съемки, проектируют перекрытую часть негативов на одно и то же место экрана. Поэтому на экране наблюдается конкретное пересечение направлений, идущих на одну и ту же точку местности (фигура 1), причем если экран сечет модель местности по плоскости, в которой расположена данная точка, то изображение получается одно, в противном случае каждая камера даст свое изображение, и точка будет казаться раздвоенной. Соединяя нераздвоенные точки кривой, получим соответствующую горизонталь, а изменив расстояние между объективами и экраном, можно переменить сечение горизонтали. В приборе оптические оси камер расположены горизонтально, а потому экран, представляющий собой матовое стекло, находится в вертикальной плоскости. Определение элементов внешнего ориентирования производится методом обычной трансформации, но только с учетом высот опорных точек, для чего фотокартограф снабжен восемью экранчиками с нанесенными на них точками — марками. Каждый из экранчиков может перемещаться по всем направлениям, т“ е., как в вертикальной плоскости, так и в направлении к камере, независимо друг от друга, и нанесенная на нем марка изображает геодезическую точку, определенную по положению и высоте. Зная координа1ы четырех геодезич. точек, можно в требуемом масштабе воспроизвести их пространственное положение четырьмя экранчиками, с марками которых должны совпасть проектируемые направления. Трансформация производится независимо для каждой камеры и достигается соответствующими перемещениями и наклонами камер. После восстановления пучков лучей, существовавших в момент съемки, экранчики убираются, и изображение принимается на стеклянный матовый экран. Пересекшиеся в плоскости экрана лучи обводятся от руки меткой, причем движение метки передается пантографом на чертежный стол в любом масштабе. Изображение, получившееся на экране, увеличено в 10 раз по сравнению с негативом, а потому неточность фиксирования пересечения лучей до 0,5 миллиметров даст в окончательном уменьшении удовлетворительную точность.
Прибор Гассера аналогичен изложенному, но экран у него расположен горизонтально, и для отбрасывания на него изображения перед объективом находятся зеркала. Метод работы несколько расходится с методом Нистри, т. к. в приборе поочередно в каждой камере освещается негатив. В силу того что перемена освещения производится очень быстро, все точки, проектирующиеся на экран, будут казаться двигающимися, за исключением тех", которые расположены на высоте, фиксируемой экраном. Этот «способ мигания» дает значительно более точный результат, так как глаз лучше схватывает неподвижные места в двигающемся изображении. Недостатком же этого способа является очень тяжелая работа для зрения наблюдателя. Кроме «способа мигания» м. б. применен и «способ анаглифов», в котором оба проектируемых изображения могут рассматриваться раздельно обоими глазами, если эти изображения окрасить взаимно дополняющими цветами (поставив соответствующие светофильтры) и наблюдать проекцию через очки, левое и правое стекло которых также окрашено в соответствующие цвета (например красный и зеленый). Этот способ дает возможность наблюдать стереоскопия, эффект, но по точности уступает обоим предшествующим. Оба описанных" выше прибора не обладают достаточной резкостью изображения, т. к. переход к другой горизонтали вызывает опускание экрана без соответствующего изменения фокусного расстояния (то есть здесь имеет место нарушение 111
основной ф-лы оптики=у, где d — рас стояние от узловой точки объектива до предмета, D — до изображения, а — фокусное расстояние), что имеет значение при большой разности высот. Кроме того точность работы сильно зависит от характера местности, то есть от нечеткости, незаметности определенных точек, а также и от однообразия рельефа. При однообразной местности и ровном рельефе этот метод оказывается вовсе непригодным (например при луговых склонах).
Указанный недостаток способа двойного проектирования устраняется, если оба изображения не накладываются друг на друга, а проектируются на экране рядом, причем каждое изображение рассматривается только одним глазом, что дает етереоскопич. эффект и слияние двух изображений в одну мнимую модель. Этот принцип осуществлен в аэросимплексе Гугерсгофа (фигура 6), в к-ром одна из проектирующих камер или Рг2) смещена из своего начального по ложения (Рг2) в сторону на отрезок к. Поэтому одноименные точки Q± и Q2, совпадающие в плоскости экрана с матовым стеклом представляются отстоящими друг от друга на К. Наводя на эти точки метки т1 и тг и рассматривая их через стереоскоп, образуемый зеркалами σ±, σχ и а2, σ2 и окулярами Окг и 0/г2, можно будет видеть мнимое изображение предмета, соприкасающееся с мнимым изображением меток в пространственной точке Q. Метки могут совместно перемещаться по всей плоскости проекции,
Ί
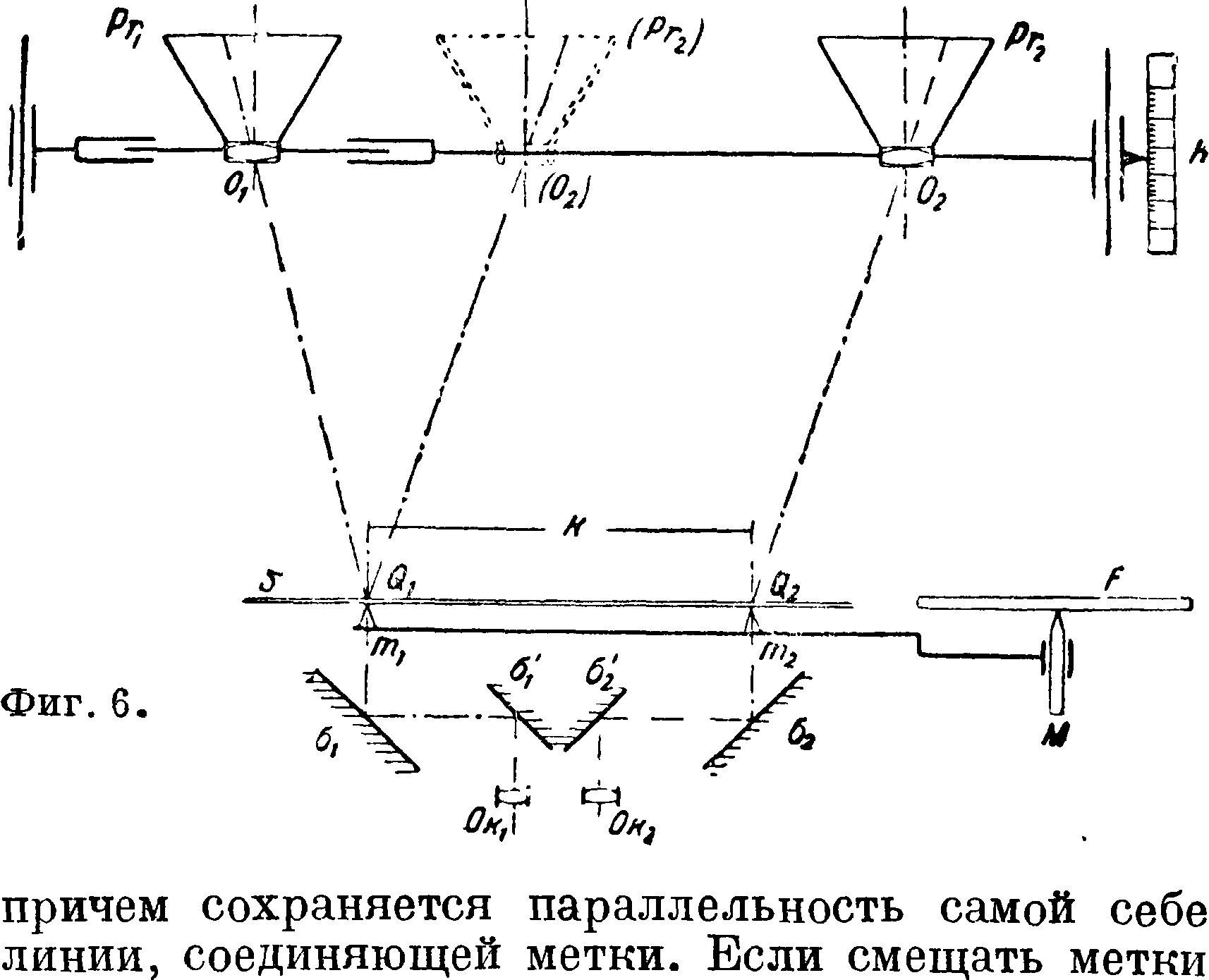
так, чтобы их мнимое изображение все время кась поверхности модели, то движение это будет происходить вдоль горизонтали и воспроизводиться карандашом М на поверхности планшета F. Перемена сечения производится изменением расстояния между экраном и камерой и отсчитывается по шкале Н прибора. Масштаб обработки определяется из отношения установленного базиса Ь0 к базису съемки В0 и м. б. изменен при установке другого расстояния 0г02. Для ориентирования камер в пространстве они имеют три линейных перемещения ЬХ) bу и bг, а также наклоны и повороты ay0i ω0 и κ0. Достоинством прибора является возможность работать и в мало контуристых местах, но некоторая не-резкость сохраняется и здесь. Во всех приборах этой группы имеется возможность применения «методапродолжения», т. к., найдя элементы внешнего ориентирования одного из снимков, можно к нему по-дориентировать (то есть найти элементы взаимного ориентирования) второй снимок, пользуясь пятью точками, общими обоим снимкам, и соответствующими перемещениями второй камеры.
Метод непосредственного измерения направлений получил в настоящее время наибольшее распространение и особенно хорошо теоретически разработан в Германии. Он заключается в том, что вместо измерения прямоугольных координат снимка производят измерения направлений. Если взять направление луча, идущего от точки местности к задней узловой точке объектива съемочной камеры, то луч, идущий от передней узловой
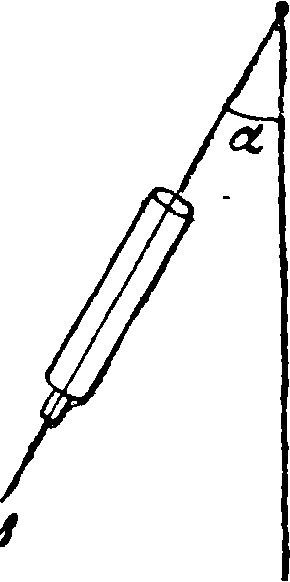
точки к изображению на снимке, будет иметь другое направление, вызванное дисторсией объектива, то есть афс^ (фигура 7). Если же обратно спроектировать точку т через тот же ооъектив, то получится опять правильное направление AM. Поэтому, поставив негатив в те же геометрич. и оптич. условия, при которых он был получен, и наблюдая любые его точки через зрительную трубу, можно заметить, что повороты трубы вокруг передней узловой точки объектива будут соответствовать истинным направлениям в пространстве. Этот принцип Порро-Коппе идентичности объективов и фокусных расстояний съемочной и проектирующей камер является основным в А. в.-с. Так как во время съемки расстояние между узловой точкой объектива и точкой местности будет бесконечно бблыним по сравнению с расстоянием между узловой точкой и плоскостью негатива, то изображение получается на главном фокусном расстоянии, а следовательно выходящие из камеры лучи при обратном проектировании будут параллельны между собой. Это приводит к тому, что зрительная труба должен быть всегда установлена на бесконечность и что лишние ошибки установки на резкость будут отсутствовать. На этом принципе Порро-Коппе построен фотоизмерительный теодолит, входящий основной частью во все конструкции данного метода.
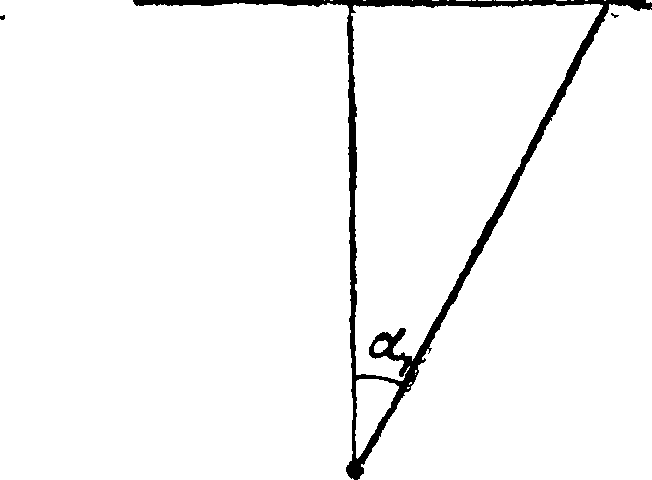
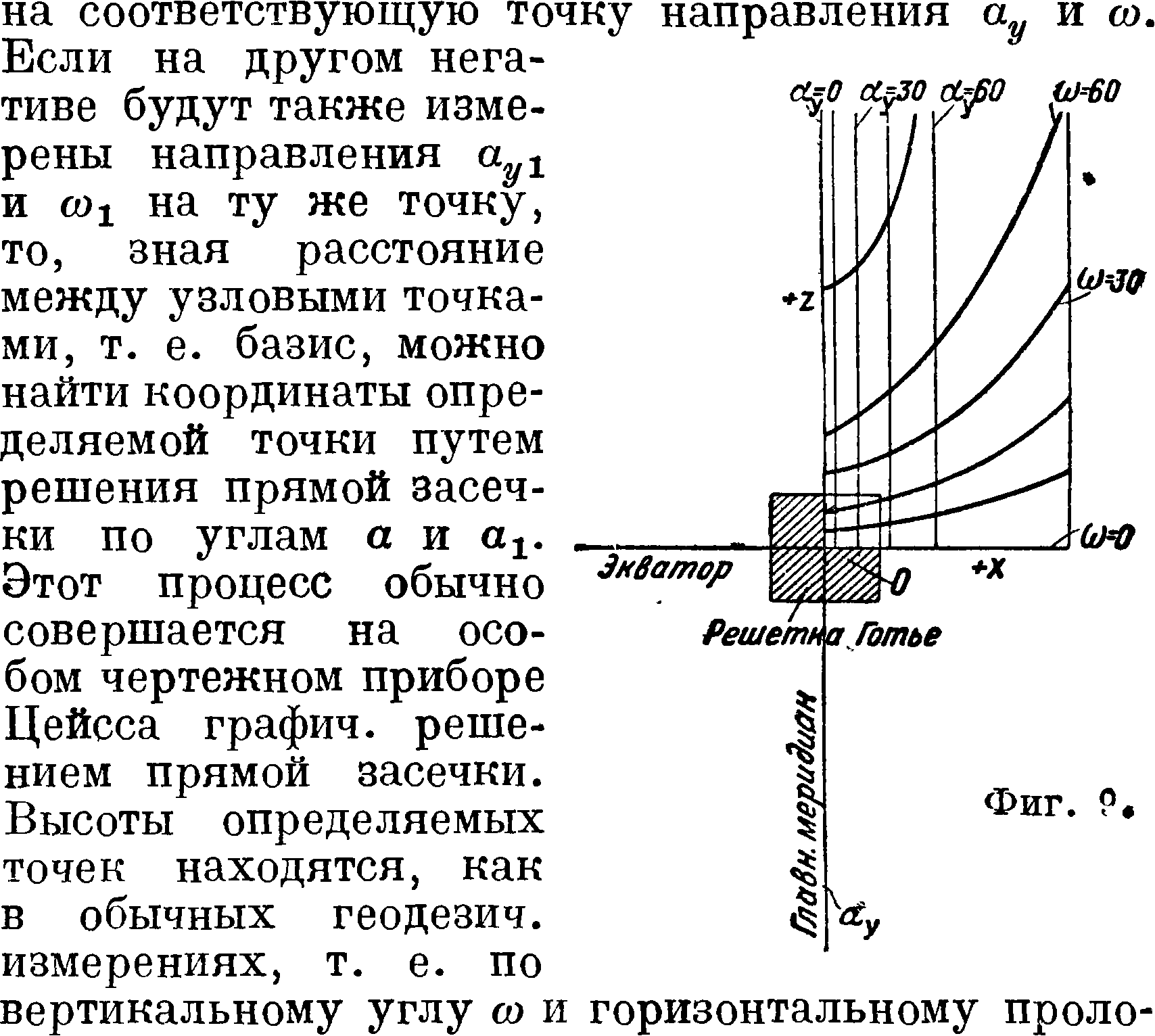
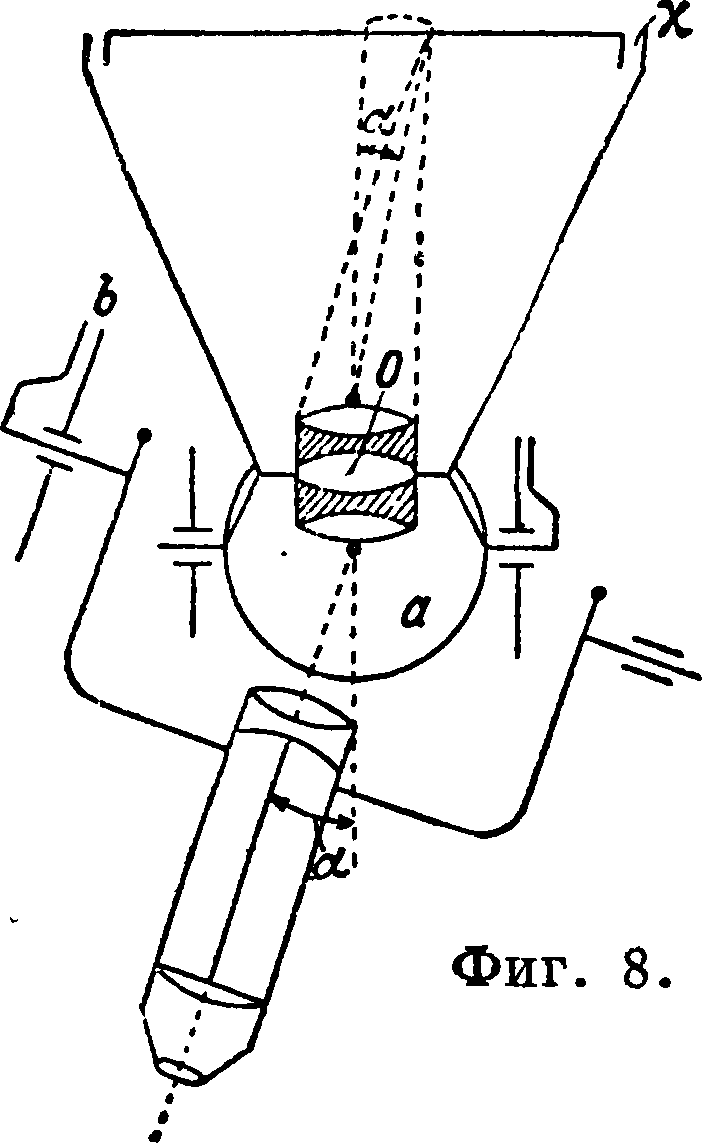
Фотоизмерительный теодолит (фигура 8) представляет собой соединение теодолита с камерой, которая снабжена прикладной рамкой для установки негатива. Прикладная рамка может вращаться вокруг оптич. оси камеры на углы κ, а наблюдение осуществляется при помощи зрительной трубы через объектив О, укрепленный в камере, которая может наклоняться вокруг горизонтальной оси и снабжена вертикальным кругом для отсчитывания установочных углов со0. Зрительная труба теодолита имеет два круга: горизонтальный а и вертикальный b для отсчитывания направлений (ау, ω) на точки, что соответствует обычным теодолитным измерениям. Для поверки работы фотоизмерительного теодолита употребляется решетка Готье, представляющая собой стеклянную плоско-параллельную пластинку с выгравированными на ней параллельными и перпендикулярными линиями через строго определенное число миллиметров с очень высокой точностью (до 0,02 миллиметров). Эта решетка укрепляется в прикладной рамке камеры и по ней производятся измерения. Необходимо рассмотреть зависимость между угловыми перемещениями теодолита и прямоугольными координатами правильно ориентированной решетки. При вращении вокруг вертикальной оси какая-либо точка (фигура 9) оптической оси трубы описывает малые круги, которые будут параллельными друг другу при изменении наклона оптич. оси на угол ω. При вращении вокруг горизонтальной оси та же точка будет описывать большие круги, в плоскости которых лежит вертикальная ось вращения инструмента. Т. о. при вращении на углы ау и ω произвольная точка М оптич. оси строит в пространстве шар радиуса OM=R с параллелями и меридианами, к-рый проекти руется на плоскость решетки лучами из центра вращения О. Тогда пройденные отрезки по осям решетки выразятся ф-лами:
Z—R tg cose α^, x=R tgciy.
Задачей фотоизмерительного теодолита является измерение координат отдельных точек местности; эта задача выполняется не путем измерения на стереокомпараторах, как в фототеодолитной съемке, а путем измерения углов, поэтому, укрепив негатив и установив на фотоизмерительном теодолите элементы ориентирования (смотрите выше) ау0, со0 и κ0, можно измерить наведением трубы
жению согласно ф-ле
Нт=нл — D tg со + г,
где НА—высота точки стояния, г—поправка на кривизну земли и на рефракцию; D берется из графич. решения засечки; так как это нахождение координат точек основывается на знании элементов ориентирования, то сперва надо найти их, для чего опознают на снимке три пункта местности и определяют посредством геодезич. измерений их координаты. Для отыскания верных координат точки стояния необходимо, чтобы эта точка не лежала на поверхности прямого круглого цилиндра, описанного вокруг трех опорных точек. Действительно, при проектировании точки стояния на плоскость, проходящую через опорные точки, получается, что определяемая точка лежит на окружности, а следовательно решение обратной засечки невозможно.
При наличии правильно расположенных геодезич. точек решение пространственной пирамиды м. б. произведено несколькими способами, распадающимися на 3 основные группы: аналитический, графический и оптико-механич. способы решения. Аналитич. и графич. способы не имеют широкого применения вследствие сложности вычислительных работ или неточности получаемого результата. Для фотоизмерительного теодолита м. о. применен метод Фишера а н а л и-тического решения. По приближенно известным значениям элементов ориентирования ω0 и κ0 производят установку негатива в фотоизмерительном теодолите и измеряют направления на опознанные точки. По полученным углам решают обратную засечку и получают приближенное значение координат точки стояния в плане, а высота Н0 определяется согласно известной ф-ле
Н0=Н+р tgco-r,
где ω—истинный вертикальный угол. Ошибка в установочном угле влияет на точность определения высоты #0, вместо которой получается ошибочное значение #0. Т. к. на негативе имеются три опорные точки, то каждая из них дает новое значение для Я0, несходное с предыдущими. Это несогласие м. б. объяснено только неправильно взятыми углами ω0, и надо изменить соответствующее ур-ие, переписав его в виде
Я0=Я+Я tg(co+Aco)—г,
где ошибка Δω складывается из ошибок со0 и κ0. Составив три ур-ия для трех высотных точек, можно определить Δω0 и κ0, чем и достигается правильное решение. Невозможность решения задачи“ при малых углах наклона оптической оси привела к значительному усложнению задачи, ставшей слишком громоздкой для решения. Графический метод заключается в развертывании пространственной световой пирамиды (образованной лучами, идущими на опознанные точки) на плоскость основания и в нахождении координат вершины пирамиды, а следовательно и длин ребер. Полученные данные не дают одного решения, и поэтому приходится исключать из них те, которые не вяжутся с решениями соседних снимков. Получив определенное положение вершины пирамиды, определяют элементы внешнего ориентирования, но неточность самого гра-фич. построения не дает их точного значения. Поэтому если и пользуются графич. методом, то только лишь для того, чтобы узнать, не лежит ли вершина на «опасном месте», то есть на поверхности круглого цилиндра, что потребует перемещения одной из опорных точек. Определение же элементов ориентирования м. б. произведено с тем, что дальнейшее уточнение результатов будет произведено аналитич. способом.
Эти вкратце изложенные способы (аналитический и графический) не получили широкого распространения, в то время как метод оптико-механического решения пространственной засечки отразился в целом ряде конструкций и нашел применение. Из сконструированных приборов наибольшее значение имеют етереопланиграф Бауэрсфельд-Цейсса, аэрокартограф Гугерсгофа и автограф Вильда, отличающиеся друг от друга не только конструктивно, но и по вложенным в них теоретич. обоснованиям. Основной задачей всех этих приборов является непосредственное получение ортогональной проекции заснятой местности и рельефа, что достигается конкретным воспроизведением пространственной засечки. Это требует того, чтобы на одном приборе происходили определение элементов ориентирования, трансформация и рисовка рельефа, то есть все те процессы, которые разбиты на отдельные, не связанные друг с другом операции в диференцированном методе. Такое решение, с одной стороны, повышает точность выпускаемой продукции (за счет уменьшения числа ошибок), но с другой, — создает значительно более сложные и дорогие конструкции, предъявляющие и большие требования к оператору. Схема этих приборов видна на фигуре 10. Пусть имеются две камеры (фотоизмерительного теодолита) Кх и К2, расположенные в пространстве таким же образом, как и аэросъемочные камеры в момент экспозиции, причем расстояние межд узловыми точками объективов должно равняться базису фотографирования, взятому в выбранном масштабе. Если в камерах укрепить негативы и осветить их, то лучи, идущие от идентичных точек обоих негативов, пересекутся между со бой, а рассматривая стереоскопически оба изоб^ ражения, можно фиксировать это пересечение при помощи марок, находящихся в наблюдательной системе. Если материализировать пересечение пространственных лучей механически или оптически, то, перемещая точку пересечения в системе координат ΧΎΖ, можно подвести под марки любую точку негатива. Эти движения точки пересечения лучей связаны с координатографом, повторяющим их на планшете, то есть вычерчивающим наблюдаемые контуры и рельеф.
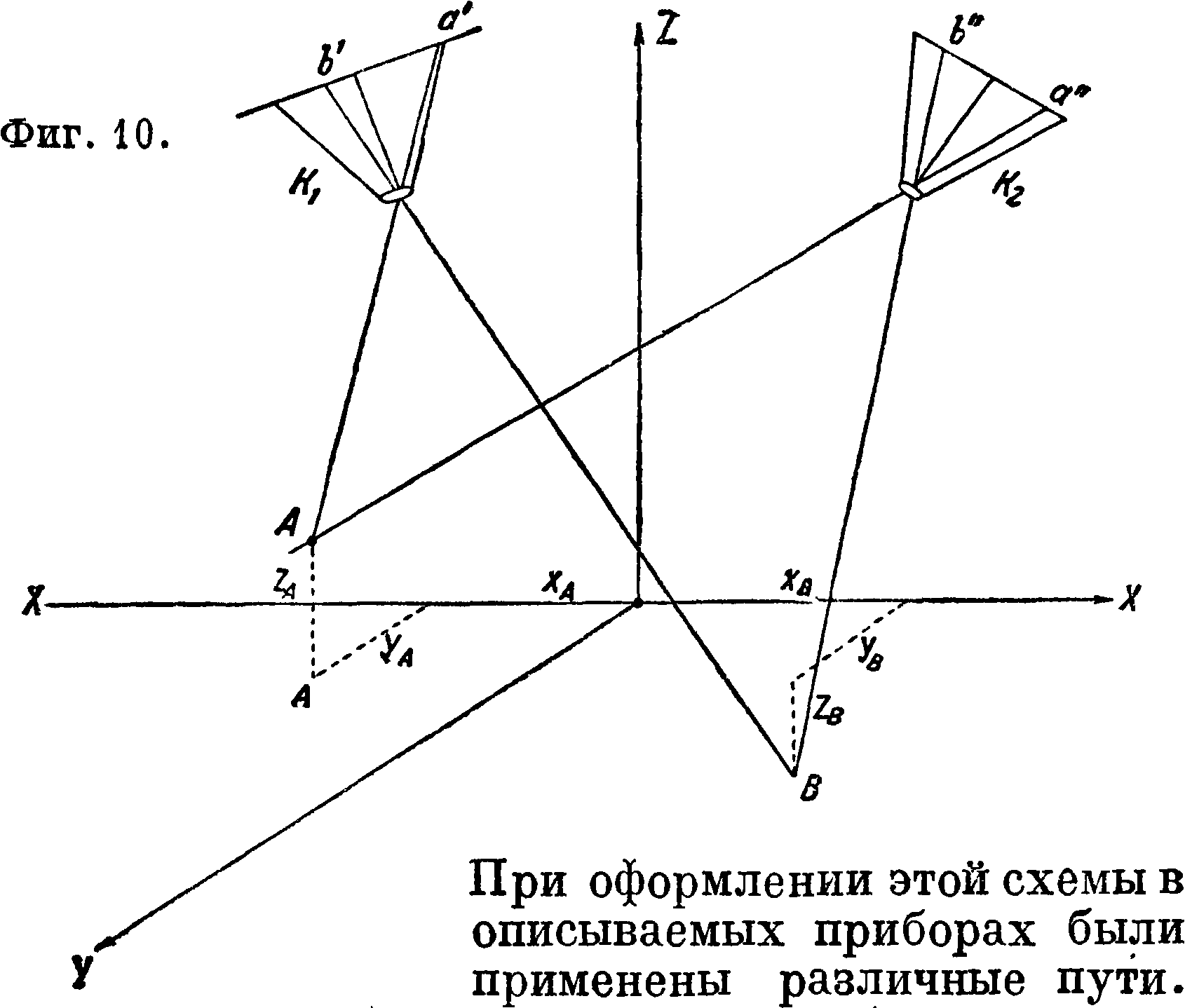
1) Камеры прибора неподвижны; наблюдение различных точек достигается перемещением пространственных лучей вместе с визирными осями; задача осуществлена оптич. путем в стереоплани-графах Цейсса Сх и С4. 2) Камеры прибора неподвижны при перемещении пересечения лучей вдоль оси Ζ (вращение на углы ω вокруг оси XX) и при наклонах осей визирования. Наклоны пространственных лучей на углы ау (вокруг оси ΖΖ) вызывают соответствующее перемещение камер при неподвижных осях визирования. Этот принцип осуществлен в аэрокартографе Гугерсгофа.
3) Ось визирования неподвижна; камеры наклоняются совместно с пространственными лучами на углы а и ω. Такой путь не дает правильного решения задачи, т. к. точка снимка, совпадающая с маркой, не соответствует той точке, которая характеризуется пересечением лучей. Если поставить в камеру решетку Готье и наклонять пространственные лучи, то каждая точка оптич. оси будет перемещаться по большим кругам, проекции которых на плоскость решетки дадут прямые линии. Поэтому есмпри ау=0 (или ω=0) наклонять камеру с пространственным лучом на угол ω (или ау), то визирный луч будет двигаться по меридиану (т. к. в начальном положении он совпадает с пространственным лучом) и проекция его перемещается по прямой линии; если же α^φθ(ωφθ), то визирная ось образует угол с пространственным лучом, и ее перемещение будет совершаться по параллели, что даст кривую на плоскости решетки, благодаря чему марка попадает на точку A вместо требуемой точки А
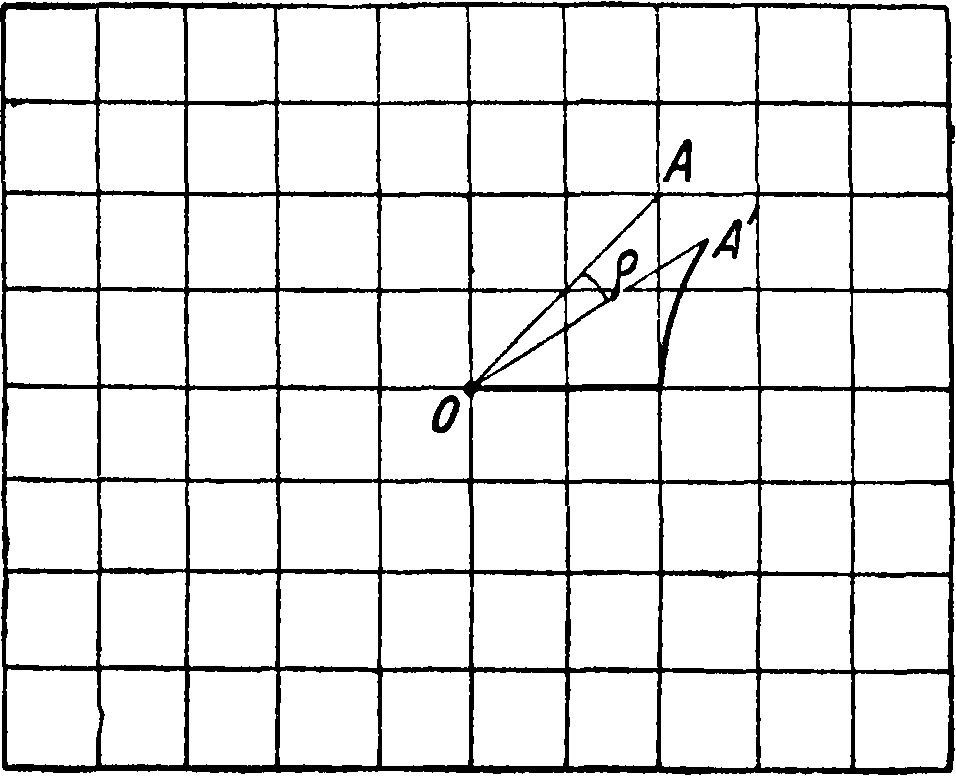
(фигура 11). Эти точки А и А лежат на одинаковых расстояниях от главной точки О, и для совмещения с маркой правильной точки А необходимо сделать дополнительный поворот камеры в своей плоскости на угол ρ, выражающийся ф-лой sin О.Ц · sin it) ter о =-.
° * COS ay + COS O)
Из ф-лы видно, что поворот на угол ρ должен совершаться непрерывно при переходе от одной наблюдаемой точки к другой. К приборам этого последнего типа, учитывающим, дополнительные повороты, относится автограф Вильда. В силу высказанных выше принципиальных отличий и конструктивные схемы этих приборов существенно отличаются между собой.
Стереопланиграф Бауэрсфельд-Ц е и с с а, представленный на фигуре 12 и 13, осуществляет пространственную засечку оптич. путем и является прибором, в к-ром камеры неподвижны, а перемещается луч визирования. На основной станине жестко укреплены две трубы, лежащие в горизонтальной плоскости и образующие друг с другом угол в 90°; они представляют собой неподвижные пространственные оси координат×и Ζ, в то время как ось У, связанная
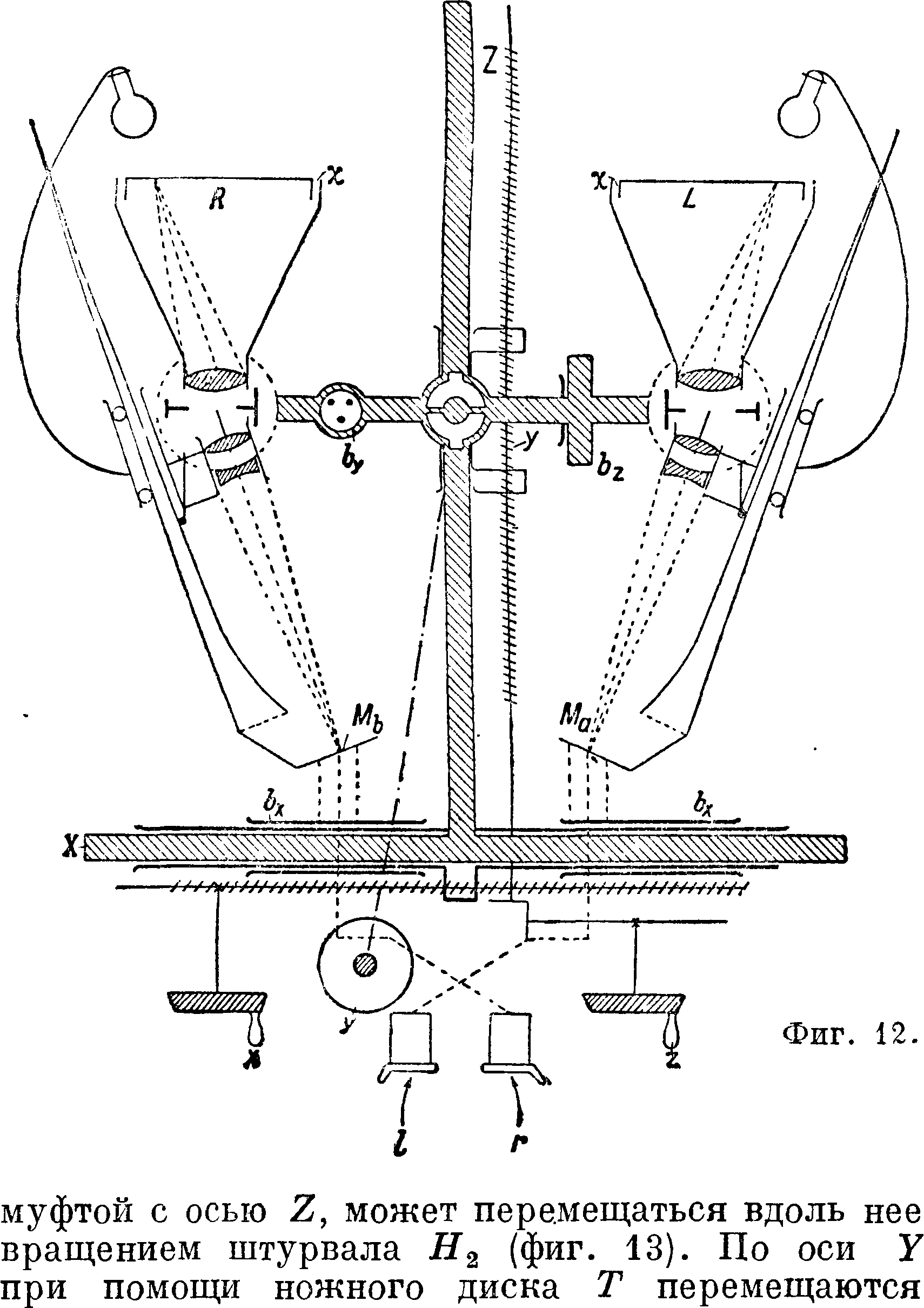
две камеры А и В (L и R, фигура 12), в которые вставлены негативы i?!. В приборе применен принцип Порро-Коппе, а потому фокусное расстояние камер устанавливается винтами Вг на равенство с фокусным расстоянием аэросъемочных камер. Перед работой камеры должен быть ориентированы относительно пространственной системы координат, для чего они могут наклоняться винтами К, Кг и К2 на углы ау0, со0 и κ0, образуемые оптическими осями в моменты съемки. Впереди объектива Ог камеры находится проектирующее приспособление—телеобъектив; телеобъектив связан особыми направляющими Lx и L2 с экранами,
представляющими собой стеклянные пластинки с нарезанными марками С и D (Ма и Мъ, фигура 12), находящимися на каретке, перемещающейся по оси XX вращением штурвала Ях. Изображение части негатива проектируется телеобъективом на
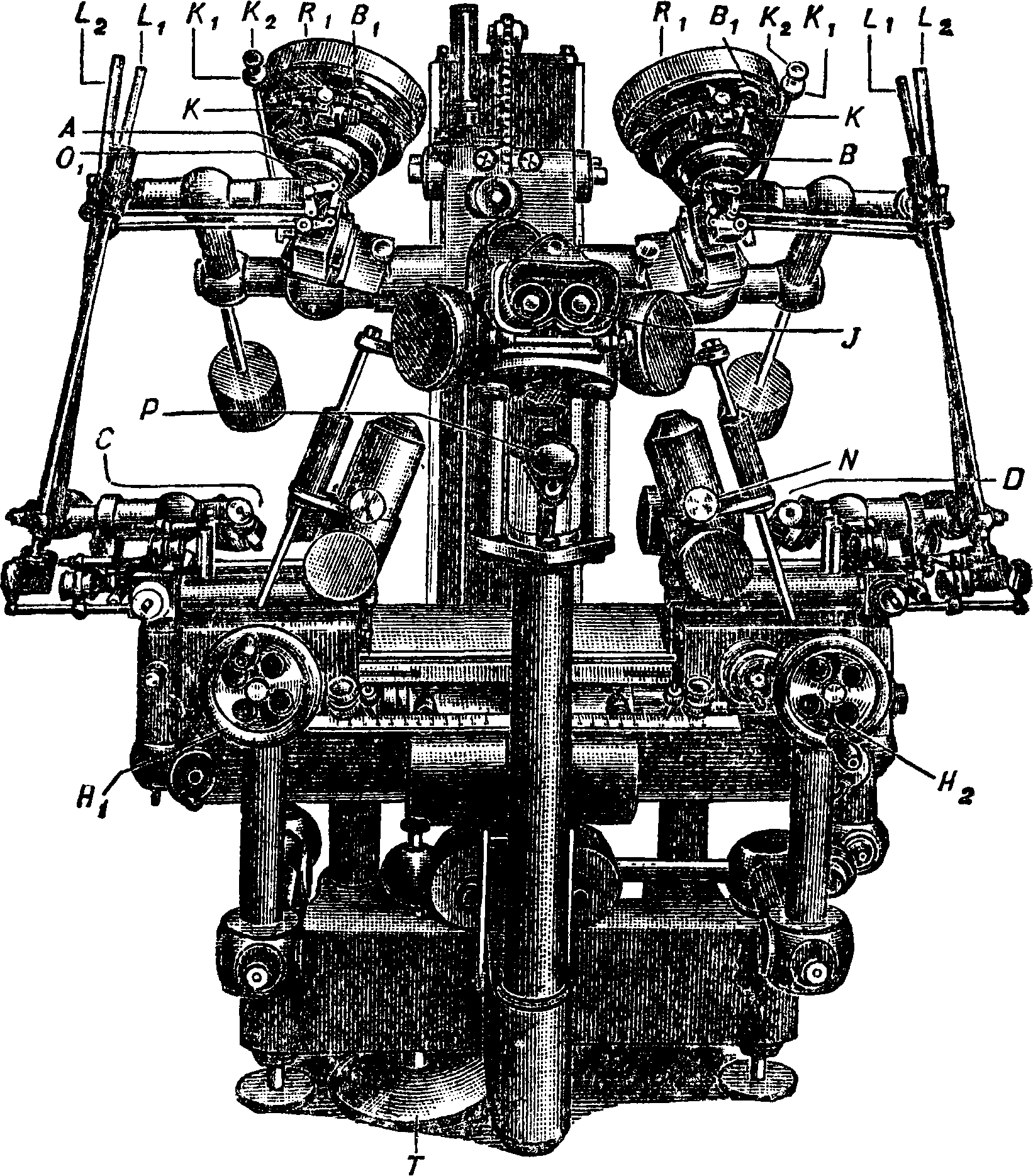
Фигура 13.
экран, причем перемещение марок по оси XX вызывает наклон направляющих, а следовательно и поворот телеобъектива на угол ау перемещение же каретки Y по оси Ζ(φπΓ. 13) дает поворот на угол со. Эти движения изменяют расстояние от телеобъектива до марки, а потому для сохранения резкости проектируемого изображения необходимо иметь переменное фокусное расстояние оптич. системы; эту задачу и выполняет телеобъектив. Марка стереопланиграфа, являясь засекаемой пространственными лучами точкой, могла бы быть одной, но в целях конструктивного удобства их сделано две, раздвинутых между собой на постоянную величину так же, как камеры в аэросимплексе Гугерсгофа. Для установки базиса фотографирования марки раздвинуты еще на дополнительные величины bXi bуи bZf представляющие собой проекции базиса на соответствующие оси координат. Изображение, спроектированное на марки, рассматривается через неподвижную бинокулярную систему J. Для того чтобы нанести на планшет наблюдаемые контуры и рельеф, к координатным осям инструмента присоединен координатограф, воспроизводящий все перемещения в заданном масштабе, то есть он имеет возможность установки нескольких коэфициентов увеличения или уменьшения. Если закрепить в камеры стереопланиграфа негативы и осветить их, то на экраны будут проектироваться изображения, которые рассматриваются стереоскопически через наблюдательную систему. Одновременным наведением обеих марок на идентичные точки негативов фиксируется касание пространственной маркой земной поверхности (поверхности модели), причем если все время сохранять это касание при вращении штурвалами х и ζ (фигура 12), то на планшете будет вычерчена горизонталь сечения, отсчитанного по шкале высот Р (фигура 13). Точно так же и контуры м. б. обведены маркой, только при этом приходится пользоваться и изменением высот. Элементы внешнего ориентирования камер определяются на самом приборе; сперва, вставив негативы в камеры, добиваются их взаимного ориентирования, показателем которого является отсутствие вертикального параллакса любой точки взаимно перекрытой зоны. Т. к. при взаимном ориентировании имеется 5 неизвестных, то достаточно на пяти точках уничтожить вертикальный параллакс, чтобы снимки приняли правильное взаимное расположение; геодезич. обоснования при этом никакого не требуется. Полученная оптич. модель м. б. наклонена по отношению к горизонтальной плоскости, а потому необходимо повернуть ее относительно местности и ввести в заданный масштаб. Эта задача выполняется при помощи четырех геодезич. точек, имеющих все три координаты, причем четвертая точка служит только для контроля. При помощи геодезич. точек или вводятся соответствующие поправки в наклоны обеих камер (как в стереопланиграфе Сг) или вся модель сразу поворачивается вокруг двух осей (как в стереопланиграфе С4).
Аэрокартограф Гугерсгофа решает ту же задачу, как и стереопланиграф, но только механич. путем. Вместо оптического луча, проектирующего изображение на экран, у него имеется стержень (прецизионный рычаг), могущий наклоняться в двух карданах. Пересечение оси рычага с передними карданами представляет собой засекаемую точку, причем соответствующие точки снимков рассматриваются через наблюдательную систему и объектив, в фокальной плоскости которого находится марка. Задний кардан связан с камерой т. обр., что при перемещении рычага вдоль оси XX камера наклоняется на углы ау. При вращении же на углы ω камера остается неподвижной, а прецизионный рычаг толкает призму, стоящую перед объективом камеры, благодаря чему меняется направление визирного луча, который начинает скользить по снимку. Отдельные конструктивные части прибора (приспособления для перемещения рычагов по осям координат, базисные установки, камеры, координатограф) соответствуют таковым же частям стереопланиграфа. Введение механич. стержней (прецизионных рычагов) вместо оптич. лучей внесло ряд дополнительных требований к механич. изготовлению и большее число ошибок, но зато значительно упростило оптич. схему. Получаемые точности ниже, чем на стереопланиграфе.
Автограф Вильда ближе стоит к аэрокартографу, чем к стереопланиграфу, т. к. решает задачу также при помощи прецизионных рычагов. Прибор сконструирован т. о., что наклон рычага на углы а^ио вызывает наклоны камеры в обеих плоскостях. Здесь имеет место третий из перечисленных выше случаев. Поэтому для правильного фиксирования наблюдаемой точки необходимо выполнить поворот снимка в своей плоскости на угол ρ, что достигается устройством особого коррекционного приспособления, автоматически, при изменении наклонов рычага, поворачивающего камеру на этот угол. В осталь ных частях конструктивная схема несущественно отличается от аэрокартографа.
Применение А. в.-с. Описанные методы А. в.-с. могут быть применены для крупных и средних масштабов, но являются совершенна нерентабельными при мелкомасштабной съемке. Пт )ичина кроется в сложности самого процесса обработки и в стоимости применяемой аппаратуры, которая не оправдывается требуемой точностью, почему для мелкомасштабных съемок применяется топографический, а иногда и просто зеркальный стереоскоп. В этом случае снимки принимаются за снятые при вертикальном положение оптич. оси и обрабатываются, как и в диференцированном методе, но без определения элементов ориентирования и трансформировав ния. Это сильно уменьшает точность (т. к. наклон оптич. оси может доходить до 3°), но все же горизонтали сечением в 20—30 метров возможно проводить стереоскопически при надлежащей высотной подготовке. В настоящее время А. в.-с. не получила широкого распространения, и причиной этого является сложность камерального (фотограмметрического) процесса. Имеющиеся за границей фирмы производят А. в.-с., но все эти работы имеют незначительный объём и являются случайными, гл. обр. изыскательскими, работами. Основными масштабами обработки являются: от 1 : 5 000 до 1 : 10 000, при этом в масштабе 1 : 5 000 на 1 км2 площади потребуется 6—1 геодезич. точек, а одна пара охватывает 0,4 км2; соответствующие цифры для масштаба 1:10 000 будут 1—2 точки на 1 км2 и одна пара охватывает 1,2 км2. Указанные данные касаются аэрофотосъемки аэрофотоаппаратом с фокусным расстоянием в 210 миллиметров на пластинку формата 18x18 сантиметров при продольном перекрытии 60% и поперечном 30%. Кроме этих геодезич. работ приходится после камеральной обработки вести еще дополнительную съемку, т. к. всегда на местности окажутся пространства, которые не могли быть обработаны на стереоприборах. При работе в масштабе 1 : 5 000 горизонтали проводятся через 1 м, причем ошибка достигает 0,5 метров.
А. в.-с. в СССР не получила никакого развития, и до 1933 г. для нее не имелось собственной аппаратуры. С 1933 г. Научно-исследовательский ин-т аэрофотосъемки проводит работу по конструированию приборов и по обработке методики А. в.-с., в результате чего были сконструированы: стереопланиграф Дробышева, стереометр Дро-бышева, двойной проектор Дробышева и разработана схема высотоплана. Из перечисленных приборов стереопланиграф, двойной проектор и высотоплан в своей теоретич. схеме принадлежат к тем же приборам, как стереопланиграф Цейсса, аэрокартограф Гугерсгофа и фотокартограф Нистри, в то время как стереометр разрешает задачу трансформирования параллаксов и рисовки рельефа.
Лит.: Келль Н., Пространственная обратная засечка в фотограмметрии, Л., 1931; Gruber О.,
Ferienkurs in Photogrammctrie, Stg., 1930; Gast P., Vorlesungen titer Photogrammetrie, Lpz., 1930; Huger-sholf R., Photogrammetrie u. Luftbildwesen, Hndb. d. wissenschaftliche u. angewandte Photographie, hrsg. v. A. Hay, B. 7, W., 1930. M. Коншин.