 > Техника, страница 23 > Блоки
> Техника, страница 23 > Блоки
Блоки
Блоки, детали машин, применяемые как направляющие приспособления для изменения направления каната или для передачи валу некоторого крутящего момента; в последнем случае канат или цепь не должны скользить по Б., тогда как в направляющих блоках скольжение имеет меньшее значение. Направляющие Б. выполняются преимущественно из чугуна. Диам. Б. обычно берутся: а) для вых канатов: вороты и ручные краны—_D>10 d, с машинным приводом—115=50 d. в шахтных подъемниках—D>80 d, где d—диам. каната; б) для стальных канатов: вороты и ручные краны—
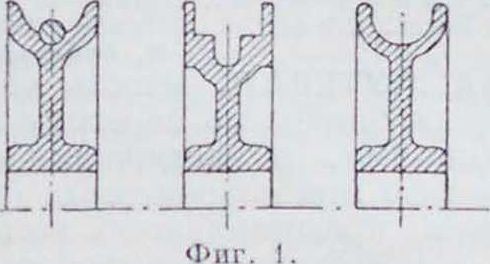
7) >400 dj, с машиин. приводом—I) > 500— 600 d,. в домовых подъемниках—D > 600-1 000 dx, где dl—диаметр проволок каната: в) для цепных Б. диаметр берется не менее 20 диаметров цепного железа. Тип ручья зависит от рода гибкой связи. На фигуре 1:
А—ручей для вого каната, Б и В— для цепи. Иногда тип Б отливается без буртиков. Небольшие Б. отливаются из чугуна цельными, без спиц. Втулка рассчитывается на снашивание по уравнению Q Udi. где Q—давление на опору, ei—диаметр втулки и I -длина ее; допускаемые напряжения на изгиб:
Дли чугуна по железу.. . 4*0,25—0,60 вг/.н.н“
» Пронзи но железу.. . ft о,4и—о,8о »
* G|)OU3U но стали.. . ft=0,60—1.2 »
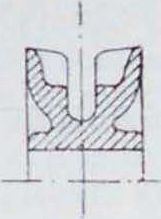
Ось Б. закрепляется неподвижно или же вращается; в последнем случае допускает-мое напряжение на изгиб нужно уменьшать вдвое, до 3—4 %г/ммг, т. к. нагрузка имеет переменный знак. Б., передающие работу, имеют более солидную конструкцию, чем направляющие; в остальном различие сводится к форме ручья. Для вого каната ручей выполняется не полукруглы»!, а клинчатым, чем достигается защемление каната и, следовательно, меньшее скольжение. В цепных Б. делают специальные гнезда по форме отдельных звеньев цепи (фигура 2); :>ти Б. обладают следующими свойствами:
1) длина всех звеньев должен быть одинакова, то есть цепь должен быть калибрована; 2) но окружности Б. ложится целое число звеньев цепи, то есть диам. Б. не м. б. произвольного размера;
А Б В
Фигура 2.
3) каждое звено цепи лежит всей поверхностью в гнезде Б. и не имеет поперечного изгиба, почему диам. Б. не влияет на изгиб звеньев цепи; практически не берут менее 5—0 гнезд. Такие малые блоки называются звездочками. Б. приготовляются из чугуна, звездочки также из стали. Скорость движения при спокойном ходе не свыше 0,.3.ч ск. Налы Б. рассчитываются на изгиб и кручение по формуле Сан-Венана. Допускаемое напряжение на изгиб:
| Для | сварочного железа. | ft.=3—6 | ml миллиметров“ |
| » | литого ж лоза. | ft,-5—6 | » |
| » | литой стали. | fts=5—S | » |
при чем с увеличением нагрузки напряжение повышается. Обоймица Б., в которой укрепляется ось, рассчитывается на смятие н срез; обычно выполняется из полосового или котельного аселеза. Бесшумные Б. и цепи употребляются при высоких числах оборотов: от 100 до 1 600 об/мин.; в этих Б. звенья цепи сцепляются с зубцами блоков без зазора; профиль зуба и выступов звеньев таковы, что сцепление между ними происходит без скольжения. При значительном расстоянии между осями таких Б. рекомендуется накладывать цепь так, чтобы натянутая часть ее находилась внизу.
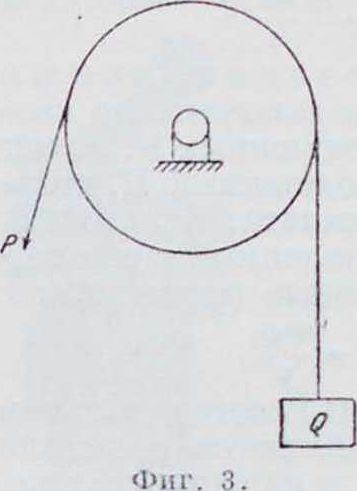
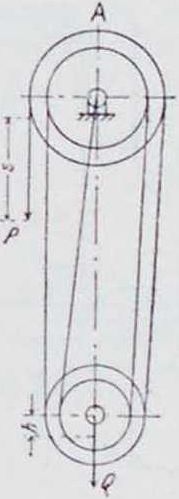
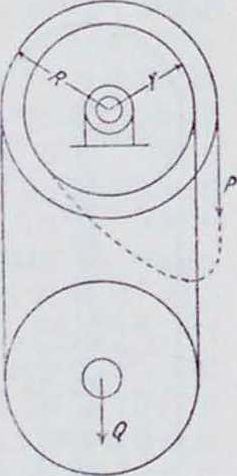
Б., передающие работу, бывают поп о-д в и ж и ы е и подо и ж н ы e. i) Неподвижные Б. вращаются на оси с неподвижными опорами (фигура 3). При отсутствии вредных сопротивлений натяжение обоих концов гибкого тела было бы одинаковым, P—Q.
В действительности нужно преодолеть жесткость каната или цени и сопротивление в опорах, и фактически: (^=ηΡ, где η—кпд блока. Для ходовых диам. Б. имеем:
d — 1C 20 23 26 ,29 36 46 S2 ММ
Ч=0,92 0,90 0,69 0,88 0,87 0,85 0,82 0,80
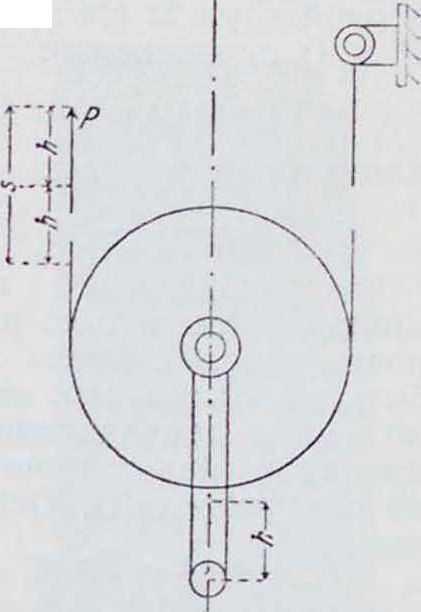
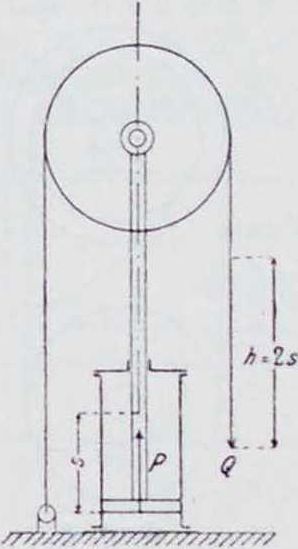
Т. о., выгодно но возможности увеличивать диаметр Б. 2) Подвижные Б. вращаются вокруг оси, перемещающейся в пространстве
.if. ii υυοι 11 < i,
пять груз Q на высоту λ,рабочий должен пропустить через руку длину ве-
iff
Фигура 4.
ревки s-- 2h, причем равенство работ вы разится ур-ием: Ps>]=Qh, или Р =Q. Для вого каната:
d=16 20 23 26 29 36 46 52 аш Ч— 0,96 0,95 0,95 0,94 0,93 0,92 0,91 0,90
Для цепи j?=0,98. Тот же Б. м. б. использован для выигрыша в скорости (фигура δ). Действующая сила приложена к обоймице, груз привешен к свободному концу гибкого тела. Сила Р проходит путь s. меньший, чем груз Q. Основные ур-ия для этого случая:
Полиспасты кратные представляют систему подвижных и неподвижных блоков при условии, что канат последовательно огибает все блоки; м. б. применены для выигрыша в силе и в скорости. Возможны
Фигура 5.
Фигура 6.
многочисленные комбинации с различным числом блоков, однако основных групп две:
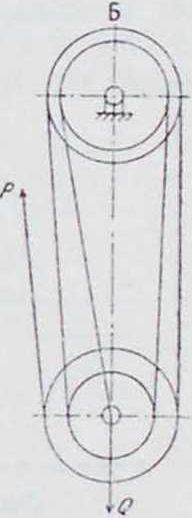
1) свободный конец каната (или цени) сбегает с неподвижного Б. (фигура 0, А) и 2)—с подвижного Б. (фигура 6, Б.). Из условий рав-
повесил получаются основные ф-лы: а) в случае выигрыша в силе—для первой группы:
и
s — nh подвижных
Р= Q,
где п—число рой группы:
s=(п + 1 )h
ηη
блоков;
ДЛЯ ВТО-
11 Р=
<3
(И + 1)4 ’
б) в случае выигрыша в скорости—для первой группы (те же схемы, но места сил Р и Q переменены):
s =
и Р —
nQ.
S =
и Р =
(п-ИНЗ
для второй группы:
h
П -f- 1
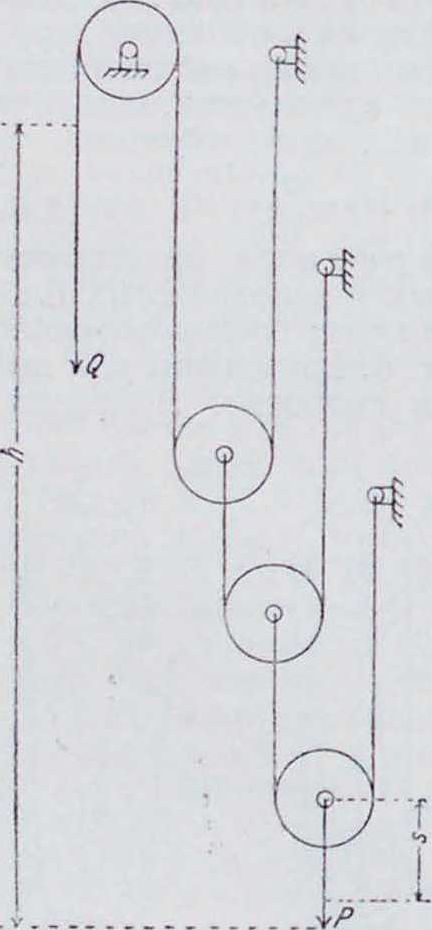
Полиспасты потенциальные применяются только для выигрыша в скорости (фигура 7). Число подвижных Б. может быть произвольным; неподвижный Б. только меняет направление каната. Каждый Б. имеет свой канат, прикрепленный к обойми-це следующего Б. Основные уравнения:
<упп
h=2ns и Р=-^,
V
где и—число подвижных Б. В потенциальном полиспасте часто употребляются цепи или канаты разной толщины в каждом участке, так как натяжения на этих участках весьма различны. Полиспасты групповые— комбинации кратных и потенциальных—в практике почти не применяются. Полиспасты Тима для проволочного каната отличаются от обычных кратных полиспастов тем, что на оси обоймицы вместо нескольких Б. посажен один с несколькими ручьями. Это дает полиспасту Тима высокий кпд >7=0,97 вместо обычн. 0.89, потому что в обычных конструкциях втулки блочков быстро изнашиваются, начинают тереться бортиками друг о друга и этим понижают кпд.
Фигура 7.
Фпг.
Всем полиспастам свойственны следующие недостатки: 1) отсутствие самоторможения, 2) малое передаточное число (s .h), 3) большая длина каната для подъема груза, 4) сильное и неравномерное изнашивание канатов и блочков. Обычно полиспасты употребляются в помощь вороту, а также как ходоуменыпители в подъемниках.
Д и ф ференциа л ь н ы и блок Вестона обладает свойством самоторможения, но очень низким кпд. Б. Вестона (фигура 8) имеет в верхней обоймице два ручья разных диам. и один Б. в нижней подвижной обоймице. Цепь огибает все три Б., причем верхний-в противоположных направлениях и потом у етремится вращать его в разные стороны. При определенном подборе диаметров действующий момент на верхнем Б. не сможет преодолеть вредные сопротивления, и груз опускаться не будет. Зависимость между путями силы s и груза h в Б. Вестона выражается так:
71=’ C9-si>) ’
а действующая сила:
Р =
Кпд меняется в зависимости от отношения числа гнезд на верхнем Б. (г.: г,):
z : z,=8 : 7 9:8 10:9 11:10 12:11 13:12
ίί=0,41 0,42 0,39 0,37 0,34 0,3
Недостатками блока Вестона являются медленная работа и сильное стирание цепи и блочков.
Лит.: Кифер Л. Г., Грузоподъемные машины, т. 1, М., 1922; Берлов Μ. II., Детали машин, Москва, 1927; Польгаузен А., Детали машин. Берлин, 1923. И. Бобарыков.