 > Техника, страница 32 > Волчок
> Техника, страница 32 > Волчок
Волчок
Волчок, в широком смысле слова—твердое тело произвольной формы, которое может вращаться около точки опоры с любой скоростью (точка опоры м. б. в состоянии покоя или прямолинейного и равномерного движения). Волчком, в узком смысле слова, или жироскопом, называется твердое тело, вращающееся с большой угловой скоростью вокруг некоторой оси, изменяющей в общем свое положение как в пространстве, так и в самом теле. Обычно жироскоп представляет собою однородное тело вращения, ц. т. которого находится на геометрия. оси; чаще всего он имеет вид плоского диска с утолщенными краями, ось вращения которого нормальна к его плоскости. Из всех внешних сил, действующих на волчок, самой существенной является сила тяжести. Если на В. кроме силы тяжести никакие другие силы не действуют, то он называется свободным или тяжелым, в зависимости от того, совпадает ли точка опоры с ц. т. или нет. Если же на В. действуют еще и другие внешние силы, то могут представиться двоякого рода проблемы: или при данных действующих силах требуется определить характер движения В. или при данном вынужденном движении В. определить действие его на связи. Поэтому главным вопросом в теории В. является установление соотношений между внешними силами, действующими на В., изменением положения его оси в пространстве и в теле и развивающимися при этом силами инерции.
В основе теории волчка лежат следующие теоремы динамики. Пусть г{—радиус-вектор точки приложения силы F{, имеющий начало в ц. т. тела, v(—скорость движения
ί=η
точки,Ж=2 -ri Fi — равнодействующий
ι=ι
момент всех сил относительно ц. т. и 9— момент количества движения тела относительно той же точки (смотрите Момент количества двиоюепия). Тогда имеем:
то есть производная по времени от вектора равнодействующего момента количества движения тела равняется по величине и направлению вектору равнодействующего момента всех сил, действующих на тело.
Пусть далее Т—кинетич. энергия движения тела, ω—вектор мгновенной угловой скорости вращения тела. Тогда:
Т=±(Τω),
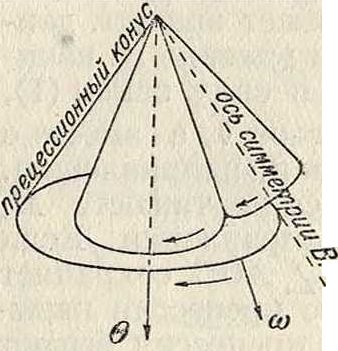
то есть кинетич. энергия движения тела равняется в каждый момент половине скалярного произведения (смотрите Векторное исчисление) вектора момента количества движения тела на вектор мгновенной угловой скорости. В частности, если Ш — 0 (что имеет место, наир., у свободного волчка), то из (1) видно, что 9=Const, то есть что в этом случае момент количества движения тела не меняет ни своей величины ни своего направления в пространстве. Если кинетическая энергия Т остается постоянной, например у свободного В., то проекция ω на направление 9 постоянна. При помощи т. н. эллипсоида Пуан-со (Poinsot) представляется возможным по данному вектору 9 определить вектор ω и наоборот. При движении В. следует различать: мгновенную ось вращения, ось, по которой направлен в данный момент вектор 9, и ось симметрии В. (если В. симметричный). В частности, движение свободн. симметричного В. состоит из равномерного вращательного движения тела вокруг оси симметрии,
Фигура 1. Фигура 2.
описывающей с некоторою постоянною скоростью круглую конич. поверхность вокруг оси постоянного направления, совпадающей с направлением вектора 9, причем оба вращательные движения совершаются в одну и ту же сторону. Движение оси симметрии В. называется прецессией. Можно это сложное движение тела представить как качение без трения одного подвижного круглого конуса по другому круглому же, но неподвижному конусу, причем общая ^образующая дает направление мгновенной оси вращения тела в данный момент, ось неподвижного конуса совпадает с направлением 9, а ось подвижного конуса—с осью симметрии волчка (фигура 1).
Прецессион. движение объясняется следующим обр.: если В. вращается с большой угловой скоростью вокруг оси симметрии, то вектор момента количества движения 9 совпадает с направлением этой оси. Пусть
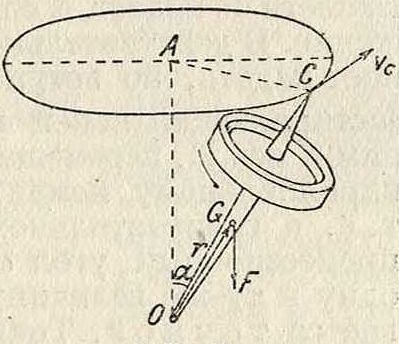
О—неподвижная точка опоры; G—центр тяжести В.; r=OG—радиус-вектор точки G, F—вес В. (фигура 2); при отсутствии вращательного движения волчок под действием опрокидывающего момента силы тяжести, равного rF]=M и перпендикулярного к плоскости ОСА, опрокинулся бы. Но при: быстром вращательном движении вектор 9, совпадая с осью В., перпендикулярен к М, так что (9Ж)=0, следовательно, имеем, принимая во внимание закон (1):
2(βΜ)=2(ϊ= ^=0; 9=Const.
(2)
Пусть далее 0(7=0, 0 — соответствующий единичный вектор и vc—скорость точки С. Тогда имеем:
аь
dt
d(b-b,) й d6, „ db
-d^=e-dt + °ι·3Γ =
db_ dt
то есть направление vc совпадает с иаправле-нием вектора который перпендикулярен вектору 6. Отсюда следует, что вектор vcпостоянен по абсолютной величине и перпендикулярен к плоскости ОАО, то есть точка С равномерно вращается вокруг точки А, а ось ОС вокруг оси О А. Угловая скорость этого вращательного движения Ω называется скоростьюпрецессии. Она определяется следующим образом:
так к&кге=[&0С]=[ιΩ 0]== Μ=[rF],
rF
το fli=rF, откуда Ω=-у-
Τ. о. получается поразительное на первый взгляд явление, что В. под влиянием силы тяжести не падает, а совершает вращат. движение. В действительности вначале В. начинает падать, но вступает в силу закон (1), заставляющий конец вектора 0, а вместе с ним и ось В. перемещаться по направлению, параллельному моменту силы тяжести М, то есть в горизонтальном направлении. Если прецессионный угол α= /_ АО С сохраняет одну и ту яге величину, то прецессия называется точной. Точная прецессия бывает лишь при определенных начальных условиях движения. Обычно же описанное выше движение оси сопровождается небольшими пе-риодич. изменениями прецессион. угла; последнее движение называется нутацией. Если какие-либо внешние силы стремятся повернуть ось В., то появляются т. н. жироскопические силы, являющиеся результатом сопротивления этим изменениям со стороны развивающихся сил инерции В.
В технике В. встречается довольно часто. Во всех тех случаях, когда имеются быстро вращающиеся части, мы имеем дело в сущности с В.; таковы, например, электромоторы, водяные и паровые турбины и тому подобное. Волчок применяют для приведения неустойчивых систем в состояние устойчивого равновесия или для улучшения уже существующего равновесия, то есть для стабилизации системы. Если В. составляет при этом существенную часть массы всей системы, то он называется непосредственным стабилизатором; если яге волчок служит лишь для указания степени отклонения системы от определенного направления, то он называется посредственным стабилизатором. Самый простой способ непосредственной стабилизации тела заключается в быстром вращательном движении самого тела; часто, однако, представляется возможным стабилизировать тело посредством связанного с ним В. Стабилизаторы применяют также для уменьшения нежелательных колебаний тела. При посредственной стабилизации В. действует на стрелку указателя или на электрич. ток либо изменяет определенное давление. Волчки можно подразделить на три вида: 1) астатические В., у которых точка опоры совпадает с ц. т. и ось занимает неизменное положение в звездном пространстве вследствие того, что В. непосредственному действию силы тяжести не подвергается; 2) компасные В., у которых ось приведена в соответствие с горизонтальной плоскостью, и 3) маятниковые В., у которых ось в покое направлена по вертикали.
В 1852 г. Л. Фуко (L. Foucault) и почти одновременно с ним Персон (Person) пытались, пользуясь свойствами астатич. В., доказать вращение земли.
Если предположить осуществимым симметричный волчок, расположенный в невесомом подвесе, движущийся без трения и опирающийся точно в ц. т., то такой В. будет описывать точную прецессию; если же к этому ось симметрии волчка совпадает с направлением момента_количества дви-нгения 0, то эта ось остается неизменно направленной в пространстве.
Суточное движение земли должно было .бы при этом проявиться в виде некоторого вращения вышеупомянутой оси по отношению к наблюдателю. Трудности осуществления жироскопа Фуко заключаются, с одной стороны, в необходимости точного совпадения ц. т. с точкой опоры, так как малейшее несовпадение этих двух точек вызывает нутационное движение, искажающее результаты опыта, с другой стороны — в устранении сил трения.
Опыт Фуко вполне удался лишь впоследствии Ф. Жильберу (Ph. Gilbert) и А. Фёпплю (A. Foppl) при помощи изобретенных ими приборов.
В жироскопе применяется так паз. карданов подвес (фигура 3), в котором ось В. укреплена внутри кольца в направлении диаметра последнего; кольцо укреплено внутри другого кольца так, что оно может вращаться вокруг диаметра, перпендикулярного к первому диаметру; в свою очередь, последнее колесо укреплено в штативе так, что оно может вращаться вокруг оси, перпендикулярной к двум предшествующим осям вращения.
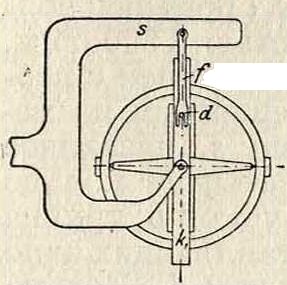
Идеи жироскопа Фуко были положены Обри в основу прибора для регулирования движения мин (в 1898 г.). В задней части мины имеется жироскоп (фигура 4), укрепленный посредством карданова подвеса и приводимый в момент выстрела в быстрое вращательное движение (до 10 000 об/м.). Ось жироскопа горизонтальна и, оставаясь постоянной, сохраняет направление выстрела. Внешнее кольцо подвеса кг снабжено штифтом d, находящимся внутри вилочки f. Как f, так и
Фиг ось внешнего кольца вертикальны. Жироскоп и вилочка подвюкно укреплены к ломаному рычагу s, соединенному с миной так, что всякое отклонение мины от направления оси волчка влечет за собою смещение рычага по отношению к оси внешнего кольца и смещение вилочки относительно рычага. Вилочка приводит при этом в движение особое рулевое приспособление, исправляющее откло-Фигура 4. некие движения в горизонтальном направлении.
Если у астатич. В. с кардановым подвесом неподвижно укрепить внешнее кольцо со штативом, то полученный прибор, имеющий уже две степени свободы вместо прежних трех, м. б. употреблен, как это было указано Фуко, для определения меридиана и географической широты данного места. В этом случае ось В. не будет сохранять постоянного направления, но будет находиться все время в некоторой плоскости S, постоянного направления по отношению к земле в данной точке и вместе с него принимающей участие в суточном движении. Во время движения В. ось его совершает в этой плоскости колебательные движения около некоторого положения равновесия, причем полный период
колебания t=2n
Vгде J-
экваториаль-
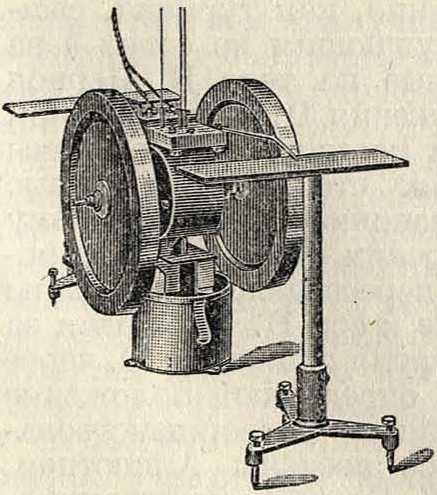
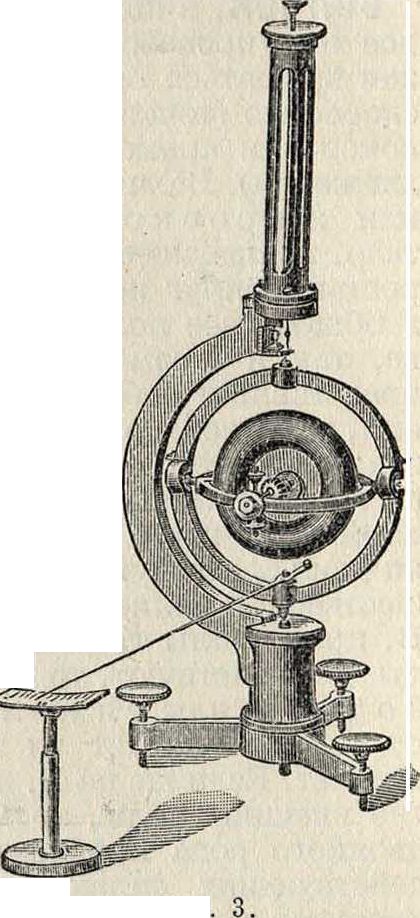
ный момент инерции волчка, a R—величина, определенным образом связанная с угловой скоростью вращения земли и с углами, определяющими направление земной оси как по отношению к плоскости S, так и по отношению к положению равновесия оси волчка. Определяя период колебания и отмечая положение равновесия оси, можно определить географии. положение места, не прибегая ни к каким астрономическим наблюдениям. Обычно плоскость колебания бывает вертикальной или горизонтальной. В первом случае получается возможность при некоторых дополнительных предпосылках непосредственно отсчитывать географическую широту места. Сюда относится барижиро-скоп Жильбера, имеющий на оси волчка подвесок для компенсации вредного влияния неполной астати-зации. Если же плоскость S горизонтальна, т.о цо-лучается возможность определения плоскости меридиана и угловой скорости вращения земли ω. А. Фёппль при помощи усовершенствованного им прибора определил ω с точностью до 2%, совпадающей с астрономическими наблюдениями. Прибор Фёппля (фигура 5) состоит из двух тяжелых колец по 30 килограмм каждое, имеющих одну общую горизонтальную ось и приводимых в быстрое вращательное движение по средством электрическ. тока. Для избежания вредного влияния трения прибор подвешен посредством трех длинных нитей, которые в то же время являются и проводниками тока, и помещен в особую коробку.
Астатич. В. с двумя степенями свободы приобретает за последнее время известное значение в авиации. Деляпорт (Delaporte) безуспешно пытался осуществить как продольную, так и поперечную автоматическую устойчивость аэроплана при помощи двух В., приводивших в движение соответствующие рули (1911 год). Ф. Дрекслер (F. Drex-ler) сконструировал прибор, дающий возможность определять степень отклонения аэроплана от положения равновесия, что особенно важно при ночных полетах или в тумане. Если, далее, осуществить В. с одною степенью свободы, закрепляя неподвижно второе кольцо, то ось В., несмотря на свою неподвижность, будет все же обладать стабилизацион. свойствами, так как при всяком изменении положения оси в подшипниках В.будут появляться жироскоп. силы, стремящиеся противодействовать происход, изменению. Все эти противодавления можно измерить ги-дравл. либо электр. способом и определить степень отклонения от первона-чальн. положения.
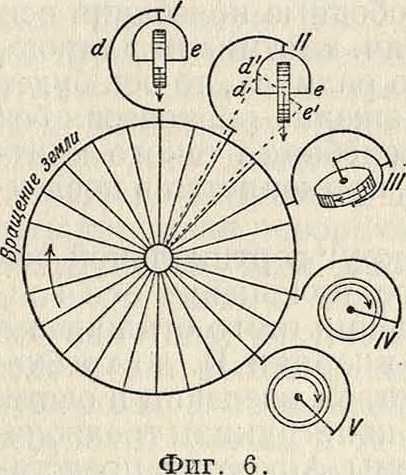
Еще Фуко указал на возможность использования В. в качестве компаса. Способность В. принимать положение, при котором ось его имеет направление на север, объясняется действием на В. силы тяжести и вращения земли. Из фигура 6 видно, что при перемещении В. из положения I во II ось его под влиянием силы тяжести должна будет остаться горизонтальной, то есть принять положение de, не параллельное первоначальному положению de. Это изменение положения оси вызывает вращение волчка вокруг его вертикальной оси, которое будет совершаться до тех пор, пока горизонтальная ось В. не расположится в плоскости меридиана. Одно-волчковый компас (фигура 7) Аншютц-Кемпфе (Anschiitz - Kampf e) состоит из В., приводимого в движение электрическим током (20000об/м.) и помещенного в коробке к. Последняя укреплена к поплавку s, снабженному ветровой розеткой и погружен-ному в ртуть, которая наполняет полость b. Прибор покоится в кардановом подвесе. Ток подводится через штифт I, который служит также для центрирования системы. В установившемся положении ось волчка лежит в плоскости меридиана и отклонена от горизонта на некоторый угол,
Фигура 7.
зависящий от географии, широты места. Так как время колебания до достижения положения равновесия очень значительно, доходя до 2 ч., то компас снабжен еще приспособлением для амортизации этих колебаний. Если В. находится на движущейся системе (на корабле), то при изменении скорости
.Север
последней ось волчка выйдет из положения равновесия, придя в колебательное движение. Однако, если свободные колебания оси синхронны с математич. маятником длиною, равною длине земного радиуса, то ось будет принимать новое положение равновесия без колебаний. Период колебания такого маятника, равный 84 мин., применяется в последних конструкциях.
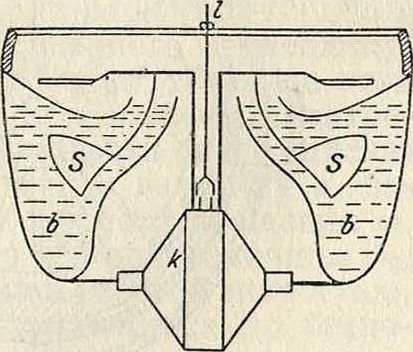
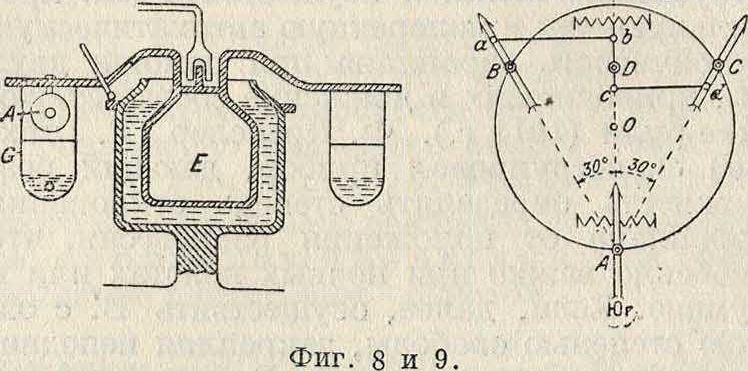
Вращение судна вокруг вертикальной оси изменяет меридианное положение оси волчка. Для предупреждения этого отклонения увеличивают момент инерции В. до требуемых размеров посредством введения в систему добавоч. В. Схема конструкции трехволч-кового компаса системы Аншютца представлена на фигуре 8 и 9. Три В.: А, В, С расположены в вершинах равностороннего тр-ка (фигура 9). Главный волчок А имеет направление оси по меридиану и расположен на ветровой розетке с юга. Положение оси главного волчка по отношению к розетке фиксируется двумя спиральными пружинами. Оси дополнительных В. В и С расположены в направлении на С.-З. и С.-В. и составляют
угол в 30° с осью главного В. Тяги аb и cd соединяют оси дополнительных В. с угловым рычагом Ώ, к-рый двумя спиральными пружинами удерживается в среднем положении. Розетка с расположенными В. соеди нена с поплавком Е. Волчки помещены в кожухах Q, нижняя часть которых наполняется маслом для смазки В.
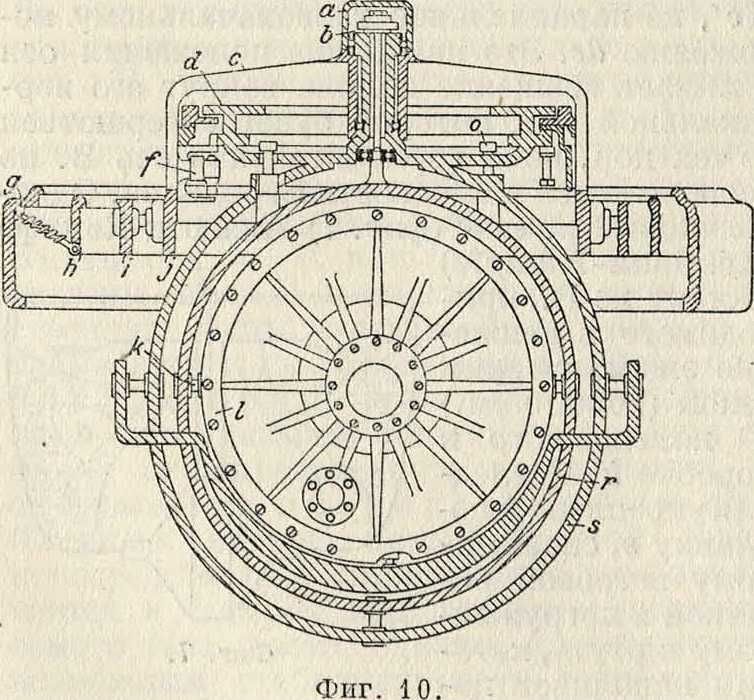
На фигуре 10 изображен компас Сперри (Sperry, С. III. А.). В кожухе I помещен волчок, вращающийся со скоростью 8 600 об/м. Кожух шипами к шарнирно соединен с вертикальным кольцом г, подвешенным на ме-таллич. нити. Второе кольцо s, названное изобретателем «фантом», охватывает кольцо г и оканчивается наверху трубкой b трубка b имеет опору на лапах с составляющих одно целое с горизонтальным кольцом j. Кольца j, i, ii осуществляют карданное соединение. Вся система подвешена на пружинах h к раме д. Кольцо s имеет розетку d, которая т. о. не соединена непосредственно с кожухом I. При повороте кожуха I и кольца г вокруг вертикальной оси включается мотор f, который вращает розетку d и фантом s до совпадения плоскости фантома с плоскостью кольца г. В то же время розетка d вращает специальный генератор, током которого приводятся в движение розетки вспомогательных компасов, расположенных в местах управления судном.
К маятниковым В. следует отнести те В., у которых центр тяжести не совпадает с точкой опоры и лежит на оси волчка. Они применяются для определения горизонтальной плоскости или вертикального направления на подвижных системах (судах и тому подобное.). Еще в середине 18 века делались попытки применения волчка для этой цели на судах; но все они оказались безуспешными главн. образом вследствие отсутствия постоянной силы, приводящей волчок в движение.
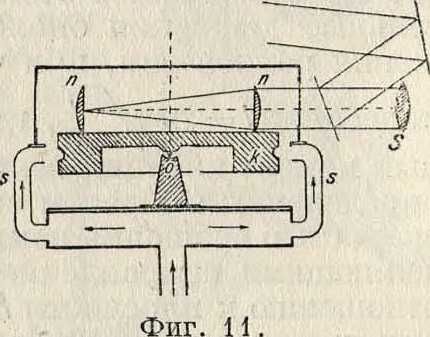
Вполне пригодным, однако, для этой цели является прибор Флерие (G. Fleuriais) для определения искусственного горизонт а. Прибор в основном состоит (фигура II) из В. к весом 175 г, опирающегося посредством штифта, на шпенек о, причем ц. т. отстоит от точки опоры на 1 миллиметров. В. приводится в движение, как турбина, сжатым воздухом, поступающим из сопел s на лопатки, укрепленные на теле В. Период прецессионного движения В. равняется при этом 2 минутам. На корпусе В. укреплены два плосковыпуклых стекла п, фокусные расстояния которых равняются их взаимному расстоянию. На плоских сторонах линз нанесены две черты, пересекающие оси линз и перпендикулярные к оси В. Наблюдая за положением их во время движения В. через трубу S секстанта, определяют положение горизонта. Дальнейшие усовершенствования в этом приборе введены Аншютцем, Ф. Дрекслером и Е. Сперри, сконструировавшими особые волчковые приборы для определения горизонта при полетах. Этот же тип волчка пытались применить для достижения автоматической стабилизации аэропланов при полете, но эти попытки не дали в полной мере желаемых результатов.
Самым простым способом непосредственной стабилизации служит приведение в быстрое вращательное движение самого стабилизируемого тела. Примером такого непосредственного В. служит орудийный снаряд, обладающий при выходе из дула наряду с поступательным также и быстрым вращательным движением. К непосредственным стабилизаторам относятся стабилизаторы для однорельсовой ж. д., у которой ц. т. вагона находится выше, чем точка опоры колеса на рельсе. В 1909 г. были почти одновременно сконструированы Ереваном (L. Brennan), Шерлем (A. Scherl) и Ф. Шиловским три системы такой ж. д. Если стабилизация при помощи В. при прямолинейном и равномерном движении вагона и достигалась, то при криволинейном и неравномерном движении потребовались дополнительные приспособления для амортизации тех затухающих колебаний вагона, которые возникают при изменении характера его движения.
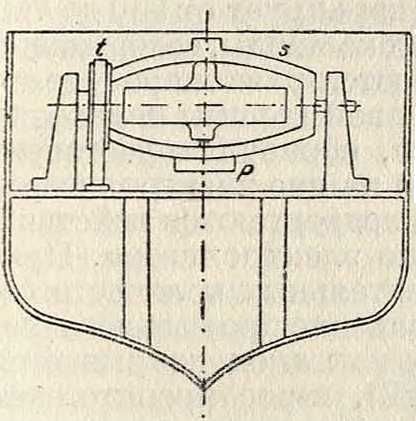
В предыдущих случаях свойствами волчка пользовались для стабилизации неустойчивых самих по себе систем, но можно использовать эти же свойства для улучшения уже существующей устойчивости. Этот принцип и лежит в основе корабельн. волчка Шлика(0. Schlick) (фигура 12), который применяется для уменьшения боковой, наиболее существенной, качки судна. В. с верти-кальн. осью, весящий 500 килограмм и диаметром в 1 м, приводится в движение, как паровая турбина. Волчок помещен внутри рамы s, вращающейся вокруг оси, направленной поперек судна. Рама снабжена тяжелым подвесом р. Появляющиеся при бортовой качке колебательные движения волчка амортизируются либо при помощи тормоза t либо гидравлическим способом. При практическом осуществлении этого В. оказалось не так важным сообщать В. большой момент количества движения, как сильное торможение, причем наилучшей устойчивости соответствуют некоторые определенные значения как силы торможения, так и момента количества движения, выше или ниже которых устойчивость ухудшается. Наибольшее свое влияние на судно В. оказывает при опасных без него явлениях резонанса (смотрите) между собственными колебаниями судна и колебаниями волн, в то время как он оказывается почти бесполезным при наличии очень больших или очень малых периодов волн. Шлику после продолжительных опытов удалось достичь хороших результатов—уменьшения амплитуды колебания судна с 18 до 1°. Но, несмотря на эти результаты, от применения такого стабилизатора на кораблях пришлось отказаться вследствие целого ряда неблагоприятных моментов, в том числе из-за вредного влияния жироскопических сил на скрепы корабля.
Жироскопич. силы играют известную роль во многих областях техники, где встречаются быстро вращающиеся диски, колеса, пропеллеры ιϊ т. п. В ж.-д. движении жироскопич. силы появляются на закруглениях пути, увеличивая давление колес на внешний рельс и уменьшая давление на внутренний, то есть действуя на рельсы в том же направлении, что и силы инерции. Особенное значение жироскопические силы приобретают в начале и в конце закругления. При неравной высоте рельсов получается вращающий момент вокруг оси, параллельной рельсам; это влечет за собою появление сил, стремящихся повернуть ось колес вокруг вертикальной оси, что, в свою очередь, вызывает т. н. виляющее движение вагона. Такие же в общем явления имеют место и при изменении курса судна, увеличивая крен, вызванный центробежной силой. Если на судне имеются паровые турбины, то качка или изменение курса влекут за собою значительные изменения давлений в подшипниках. Особенную роль жироскопические силы играют при полетах, благодаря большой угловой скорости вращения пропеллеров. При изменении курса аэроплан под действием жироскопич. сил наклоняется в направлении движения, при изменении же высоты аэроплан поворачивается вокруг вертикальной оси. При движении велосипе-д а жироскопич. силы также имеют известное значение, играя, в противоположность только что рассмотренным случаям, полезную роль. В современном велосипеде центр переднего колеса и точка его опоры лежат по обе стороны от направления рулевого стержня, причем точка пересечения этого направления с направлением пути находится впереди точки опоры. Когда велосипед начинает наклоняться, то приложенная к центру переднего колеса сила тяжести начинает поворачивать колесо вокруг рулевого стержня, велосипед начинает описывать кривую, причем возникает центробежная сила, стремящаяся воспрепятствовать его падению. Кроме того в то же время возникают и жирбскопические силы как в переднем, так и в заднем колесах, действующие в том же направлении, что и силы инерции. Жироскопич. силы появляются также в некоторых случаях при наличии круглых дисков, насаженных на вал и вращающихся вместе с ним вокруг оси последнего, как это имеет место, например, в паровых турбинах. Если ц. т. диска, насаженного перпендикулярно к оси вала, не лежит точно на этой оси, то возникающая при вращении центробежная сила (помимо тяжести самого диска) прогибает вал на нек-рую величину g, зависящую от угловой скорости вращения со. При увеличении со до некоторой величины <лк, называемой критической угловой скоростью, прогиб g стремится увеличиться до бесконечности; практически имеется возможность превзойти а>к. При данной величине со каждой точке оси вала соответствует определенная величина прогиба g. Если точка максимального прогиба лежит в плоскости диска, то при вращении диск остается в одной и той же плоскости, а ось его остается параллельной сама себе; если же это
обстоятельство не имеет места, то ось диска совершает вынужденное прецессионное движение, вследствие чего появляются жиро-скопич. силы, влияние которых тем значительнее, чем больше о>. Действие жироскопических сил проявляется в том, что при наличии их все явления, связанные с прогибом вала, имеют место при большей угловой скорости, чем в их отсутствии, то есть что жироскопич. силы как бы делают вал более жестким, вследствие чего они действуют положительным образом, если угловая скорость вращения остается ниже критической. Жироскопич. силы могут возникнуть также вследствие неполного совпадения ц. т. с геометрическим центром.
Лит.: 1) Классические труды по теории В.: Р о i η-s о t L., Theorie nouvelle de la rotation des corps, P., i852; Klein F. und Sommerfeld A., Uber die Theorie des Kreisels, Η. I—YI, Lpz., 1897—1910 (4 выпуска, из которых 4-й посвящен техническим приложениям В.); Bogaert E. W., L’effet gyrosta-tique et ses applications, P., 1912; Crabtree Η. An Elementary Treatment of the Theory of Spinning Tops and Gyroscopic Motion, L., 1909; Perry J., Drehkreisel, hbersetzt v. engl., Leipzig, 1904; G r a m-m e 1 R., Der Kreisel, seine Theorie u. seine Anwen-dungen, Braunschweig, 1920; G e 1 f ert J., Der Kreisel und seine Anwendungen, Berlin, 1927; Routh E. J., Treatise on Dynamics of a System of Rigid Bodies, London, 1905; Levi-Civita T. ed Amal-d i U., Lezioni di meccanica razionale, v. 2, parte II, Bologna, 1927; Lorenz H., Teclmische Anwendungen d. Kreiselbewegung, «Z. d. VDI», 1919, B. 63, p. 1224. 2) Труды, трактующие отдельные вопросы теории и технич. применений В.: а) Об опытах Фуко: Recueil des travaux scientifiques de L6on Foucault, P.,1878; Person, «CR», 1852, t. 35; T r о u v 6 G., «CR», 1890, t. 101; б) Об опытах Фёппля: Foppl A., «Physikal. Ztschr.», Lpz., 1914, B. 5; в) Об астатич. электрич. В.: D r e х 1 e r F., «Motorwagen», Berlin, 1913, В. 16; Neuburger A., «Motor», В., 1919; г) О компасных В.: Anschtitz H., Kam pf е и. S с h и 1 е г М., «Jahrb. d. Schiffbautechn. Ges.», Berlin, 1909, В. 10; M a 1 g о r n G., «GC», 1928, 2; д) О приборе Флерие’: F a v έ L., «Revue maritime et colo-niale», Paris, 1910, v. 84; e) Об однорельсовых ж. д.: В а г k h a u s e n G., Eisenschienenbahn und Kreisel-bahn, «Z. d. VDI», 1910, B. 54, а также статьи в «Engineering», L., 1907, 1910; ж) О В. Шлика: S с h 1 i с к О., Schiffskreisel, «Jahrb. d. Schiffbautechn. Ges.», Berlin, 1909, В. 10; Foppl A., «Z. d. YDI», 1904, B. 48, p. 478, 1906, B. 50, p. 1032; з) О действии жироскопич. сил в турбинах: S t о d о 1 a A., Dampf- und Gas-turbinen, 5 Aufl., Berlin, 1924; Mises R., Stabili-tat rotier. Wellen, «Monatshefte f. Mathem. u. Phys.», "Wien, 1911, B. 22; Lorenz H., «Z.d. YDI», 1919, В. 63; Stodola A., «Zeitschrift f. d. ges. Turbinen wesen», Miinchen, 1918, B. 15. 3) Библиография: G г a m m e 1 R., Der Kreisel, seine Theorie und seine Anwendungen, Braunschweig, 1920; St ackel P., Element. Dynamik d. Punktsysteme, «Enzykl. d. mathem. Wissenschaften», B. 4, T. I, Art. 6, Lpz., 1901 (библ. до 1905 г.); Bogaert E. V., Leffet gyrosta-tique (библ. до 1912 г.), P. 1912. M. Серебренников.