 > Техника, страница 36 > Геликоптер
> Техника, страница 36 > Геликоптер
Геликоптер
Геликоптер, летательная машина тяжелее воздуха, подъем которой происходит за счет направленной вверх тяги, развиваемой одним или несколькими воздушными винтами с вертикальною осью, приводимыми во вращение двигателем. Этот принцип поддержания аппарата в воздухе, совершенно отличной от такового в аэроплане (смотрите), делает возможным для геликоптера ряд режимов, которые не могут быть осуществлены аэропланом, а именно: 1) взлет с места без разбега и подъем по вертикали; 2) неподвижное «висение» в воздухе; 3) спуск под любым углом (включительно до прямого) и посадка без горизонтальной скорости, а следовательно, и без пробега. Г., как и аэроплан, имеет возможность двигаться по горизонтальному или наклонному направлению с достаточно большими скоростями. Подъем и посадка без горизонтальной скорости значительно упрощают вопрос о вынужденных посадках на пересеченную местность и дают возможность применять геликоптер как машину ближнего городского транспорта. Неподвижное «висение» в воздухе также представляет большой интерес для целого ряда мирных и военных целей (для фотографирования местности, корректирования артиллерийской стрельбы, метания и проч.).
Проблема Г. еще далеко не получила своего полного разрешения, и работы по его осуществлению не вышли еще из стадии предварительных опытов. Достигнутые в настоящее время (1928 год) результаты полетных испытаний различных Г. сводятся к следующему: а) максимальная продолжительность полета 8 минут, б) наибольшая длина пройденного пути 120 .м, в) наибольшая высота 50 Jit (привязной Г.) и 6 At (свободный Г.), г) максимальный поднятый груз 450 килограмм (пилот, 4 пассажира, горючее, масло) и д) наибольшая горизонтальная скорость 30 км/ч.
На основании ряда построенных машин, а также многочисленных проектов и патентных заявок можно наметить следующие возможные типы Г., распределив их по основным признакам.
I. По способу осуществления подъема: 1) одновинтовые, 2) двухвинтовые с пинтами, установленными па одной общей оси (соосные), 3) двухвинтовые с винтами, установленными на двух параллельных осях, и
4) четырех- и многовинтовые.
II. По способу устранения крутящего ре активного момента могут быть: 1) с вращением несущих винтов в противоположные стороны, 2) с устройством специальных рулевых винтов (одного или нескольких) и 3) с устройством специальных направляющих "поверхностей (лопаток).
III. По способу осуществления поступательного передвижения: 1) с постановкой специального тянущего винта, 2) с наклонением оси винта в сторону движения и 3) с наклонением всего аппарата с винтом в сторону движения путем постановки специального хвостового винта или применения особого приспособления—так паз. автомата-перекоса. Все эти возможные варианты в тех или иных комбинациях представлены
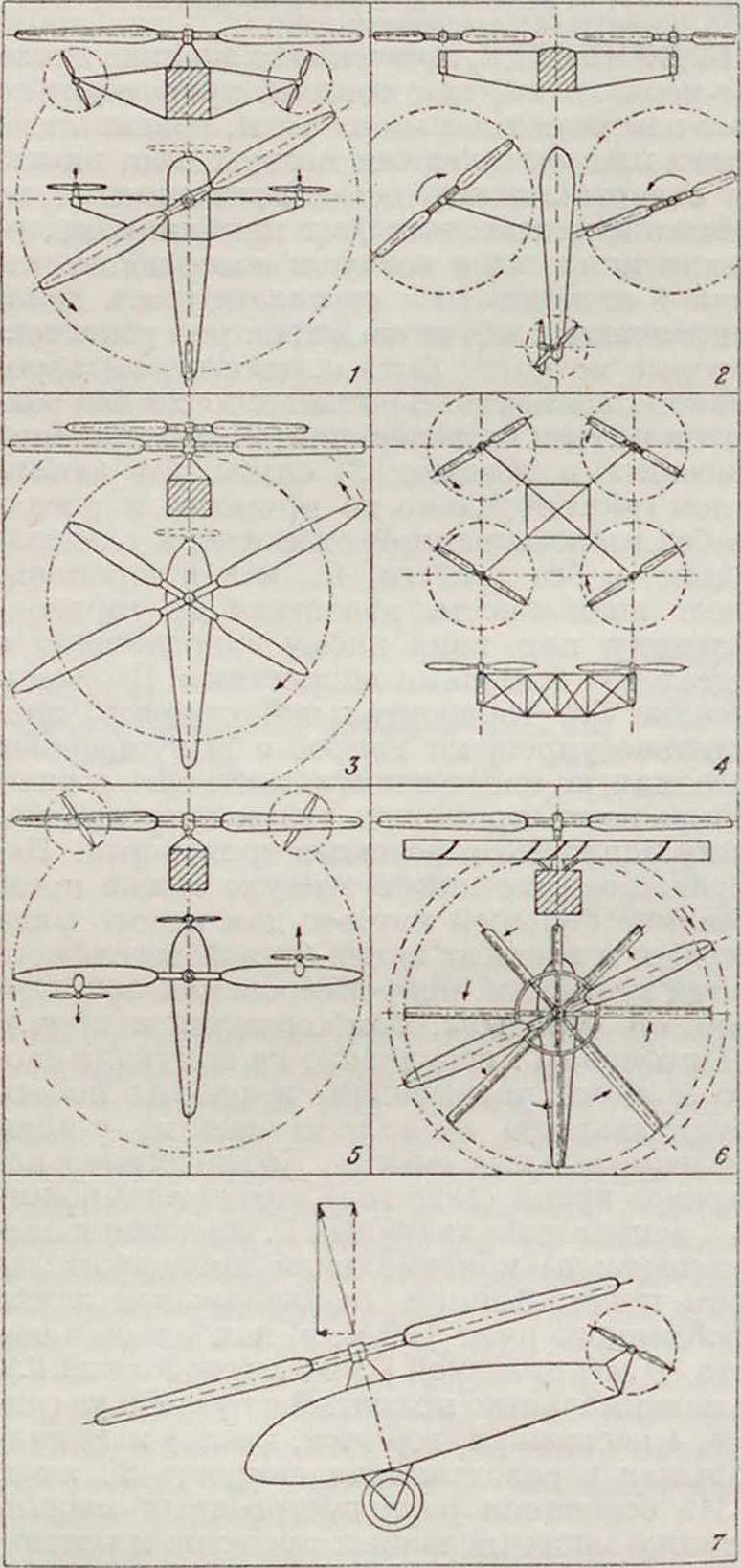
ФИГ. 1.
в схематическом виде на фигуре 1. В таблице приведены основные данные наиболее интересных из построенных геликоптеров. устойчивость аппарата, «висящего» в воздухе на вращающемся винте. Целый ряд причин (ветер, близость земли, горизонтальное движение и тому подобное.) могут вызывать моменты, опрокидывающие его в ту или иную сторону. Точно так же вопросы веса всей конструкции, имеющие для Г. значение не меньшее, чем для аэроплана, становятся более трудными для разрешения, т. к. здесь прибавляются сложные передаточные механизмы, легкое и надежное осуществление которых весьма затруднительно.
По основному принципу своей работы несущий винт Г. не отличается от обычного воздушного винта (смотрите), но может, однако, находиться в условиях, совершенно отличных от винта аэропланного. Прежде всего винт геликоптера или вовсе не перемещается вдоль своей оси (при «висении») или перемещается со сравнительно небольшой осевой скоростью (при подъеме и спуске). Чтобы достигнуть возможно большей тяги на 1 Н3, выгодно увеличивать диаметр винта, причем приходится уменьшать число оборотов. Однако с увеличением диаметра возрастает пес винта, так что для каждого отдельного случая путем расчета могут быть выбраны наивыгоднейш соотношения между мощностью мотора, диаметром, числом оборотов и шагом винта. Сообразно с указан, выше, винты делаются двухтрех- и четырехлопастными. При всяком движении геликоптера, кроме строго вертикального,особенно же при горизонтальном, впит окажется работающим в косом потоке воздуха, или, как это принято называть, с косой обдувкой, то есть в плоскости винта будет иметь место известная скорость воздуха. Так, например, правая лопасть (смотря по направлению полета) будет иметь скорость относительно воздуха, равную сумме окружной скорости ?·ω и скорости гори-зонтального полета ν, а левая—равную их разности (фигура 2). При этом подъемная сила каждой лопасти, проходящей через правое положение, будет больше, чем проходящей через левое, примерно, в отношении что дает некоторый момент относительно центравинта в плоскости,проходящей через его ось и перпендикуляры. к направлению полета. Чтобы не дать этому моменту перевернуть Г., надо или устранить его или уравновесить таким же моментом. В многовинтовых Г. это легко достигается вращением винтовв противоположные стороны; при одновинтовых требуется специальный механизм—так называемым автомат-
характер истина геликоптеров.
| Название Г. | Мотор | Колич. и мощность моторов в 1Р | Число поддержи в винтов | Их диам. в -vt | Полный вес Г. в килограммах | Нагрузим в килограммах I IP | Нагрузка в килограммах мг |
| Ботезат. | Ротат. | 1 Х220 | 4 | 7,62 | 1 680 | 7,64 | 9,21 |
| Берлинер i.. | » | IX 80 | 2 | 5,5 | 600 | 7,5 | 12,6 |
| » 2. | » | 1×220 | 2 | 4,5 | 800 | 3,6 | 21,3 |
| Пескара 1. | Пспано | IX 60 | 2 | 7 | 600 | 10.0 | 8,16 |
| ·> 2. | » | 1×180 | 2 | 7,2 | 850 | 4,72 | 10,45 |
| Р. К. Z № 2.. | Рон | 3X120 | 2 | 6 | 1 400 | 3,9 | 21,8 |
| Эмишеи № 2. Бреге. | »
Стацио- |
1X120 | 4 | 1 2X7,6 1 2X6,4 | 850 | 7,08 | 5,48 |
| Корню. | нар гг. | 1×45 | 4 | 8 | 578 | 12.88 | 2,93 |
| Антуанетт | 1X13 | 2 | 6 | 260 | 20,0 | 4,6 |
Одной из наиболее трудных задач для I практического использования Г. является г
//-скорость полета i 7ХО-Окружк
__ OMcpOGihb
·<------------>-
7 суммарная тяга
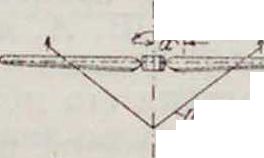
подъемная сала калсд. я on а с/пи
d- эксцентриситет Фигура 2.
перекос. Сущность последнего заключается в том, что он дает возможность изменять углы атаки лопастей винта при вращении т. о., что при прохождении лопасти через правое положение угол атаки лопасти, а следовательно, и ее коэффициент подъемной силы, уменьшается, при прохождении же через левое—увеличивается. Таким путем может быть достигнуто равенство подъемных сил правой и левой лопасти и уничтожен опрокидывающий момент. При помощи этого же механизма летчик может произвести наклон всего аппарата в любом направлении. Элементарная схема такого устройства изображена на фигуре 3.
Кроме косой обдувки, интересно отметить режим «торможения», то есть спуска геликоптера с работающим мотором (на неполн мощности). Здесь винт будет испытывать как бы тормозящее действие воздуха, обдувающего его снизу. В зависимости от соотношения между мощностью мотора и вертикальн. скоростью величина этого торможения может быть различна; она может быть и такова, что остановит винт и начнет его вращать в обратную сторону, как ветряную мельницу.
Кроме того, представляет особый интерес работа винта Г. на режиме авторотации, когда геликоптер спускается с неработающим хютором и винт вращается от набегающего снизу потока. Выяснилось, что в этом случае винт оказывает сопротивление падению большее, чем сплошн. диск с диаметром, равным диаметру винта; это дает возможность осуществить спуск Г. даже в случае остановленного мотора. Однако, чтобы не дать винту вращаться в обратную сторону (что весьма невыгодно в силовом и в аэродинамическом отношении), нужно иметь возможность одновременно у всех лопастей изменять шаг, уменьшая его и даже доводя до отрицательного. При подходе к земле можно до некоторой степени использовать живую силу вращающегося винта и внезапным увеличением угла атаки всех его лопастей вызвать кратковременное увеличение его подъемной силы, что может быть весьма существенно для уменьшения вертикальной скорости в самый момент посадки.
Все перечисленные режимы винта Г., простые в принципе, на практике с трудом поддаются расчету и требуют ряда опытов для окончательного выяснения. Равным образом и конструктивное осуществление механизмов автомата-перекоса, изменения шага, передач и тому подобное. настолько трудно, что до сего времени не получено хотя бы сколько-нибудь приемлемого решения.
Лит.: «ВВФ», 1923, /, 1921, 10—11·. «Самолет», М., 192-1, 2; Lami Μ., I,е vol vertical et la sustenta-(ion indipendante, P., 1929; M a г к о u 1 i s W., l.es liClicopt^res, P., 1922. А. Изаксон, А. Черемухмн.