 > Техника, страница 36 > Генератор переменного тока
> Техника, страница 36 > Генератор переменного тока
Генератор переменного тока
Генератор переменного тока, альтернатор, электрическая машина, служащая для образования переменного тока. В технике под переменным током обычно подразумевают такой ток, мгновенное значение силы которого в зависимости от времени изменяется практически по закону синуса. Для получения переменных токов посредством электрических машин применяются генераторы двух видов: синхронные и асинхронные. Синхро н и ы е Г. п. т. получили в настоящее время наибольшее распространение. Отличительной особенностью этих машин является то, что в них магнитное поле создается посредством постоянных магнитов или при помощи электромагнитов, так паз. индукторов, питаемых постоянным током, а наведение переменной эдс в обмотке якоря происходит вследствие изменения положения витков обмотки якоря относительно постоянного магнитного поля. Совместная или параллельная работа двух или нескольких таких машин возможна только при условии вращения их строго в такт с определенным числом оборотов, или, как говорят, синхронно, откуда и произошло название этих машин. Асинхронные Г. п. т. представляют собою обращенные индукционные двигатели (бесколлекторные или коллекторные); подробно об этих машинах см. Индукционные машины, здесь же будут рассмотрены лишь синхронные Г. п. т.
Принципы действия синхронного генератора переменного тона. Действие альтернатора, как и всякой электрической машины, основано на явлениях электромагнитной индукции. В простейшем виде Г. п. т. имеет следующую конструкцию.
В равномерном магнитном поле (фигура 1), создаваемом двумя полюсами N и S, вращается вокруг оси с равномерной скоростью
Фигура i.
проводник в форме прямоугольной рамки. В плоскости чертежа рамка имеет ширину равную 2 г и в осевом направлении длину I. В указанном на фигуре 1 положении плоскость рамки пронизывается магнитным потоком </’, который равен произведению магнитной индукции В в межполюсном пространстве на проекцию площади рамки нормально к силовым линиям, то есть
Ф=В Sol — В 2г I · cos к.

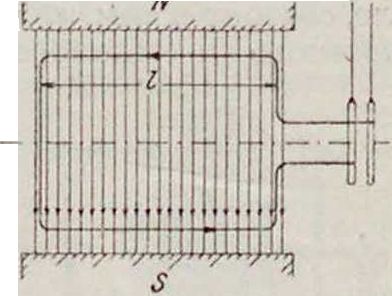
При вращении рамки в ней наводится электродвижущая сила, равная
d4>, d (В-2г· cos α)
it 1υ — d i
= В 2r l siu a · rf,v · 10"8 вольт,
io-8 =
Произведение В 2r· l представляет собою магнитный поток, пронизывающий рамку, когда плоскость последней находится в положении нормальном к силовым линиям; в этом случае Ф достигает своего максимума:
Ф,Ш1Х=В 2г I. выражает угловую скорость
da
dt
Величина
ut
вращения рамки и равна ω; таким образом,
-ф 1П-8 — _ d CWr · cos а) dt J
Kiax Sin <ot ΙΟ-8. (1)
Магнитный поток, охватываемый рамкой во время ее вращения, изменяется по закону:
COS u>t
- Ф sin
(ωί + тонн)
(2)
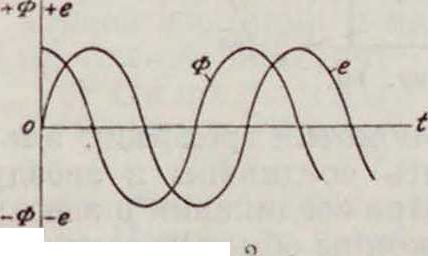
Из уравнений (1) и (2) видно, что при равномерном вращении рамки в однородном магнитном иоле наводятся переменные синусоидальные эдс; при этом магнитный ноток Ф, охватываемый рамкой, также изменяется по закону синуса, но по фазе он опережает н а в о д и м у ю и м эдс на угол г],
7
или на четверть периода, (. Этот процесс наведения эдс графически изображен на фигуре 2, а посредством векторов—на фигура 3. Амплитудное значение эдс равно:
Umax=Фтах «> Ю-8 ВОЛЬТ.
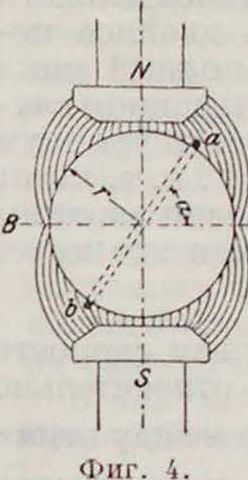
Для получения эдс, применяемых для практич. целей, приходится иметь сильные магнитные поля. Получение сильных магнитных полей в значительн. мере облегчается, если сопротивление магнита, цени сделать малым, а магнита, поле создать посредством электромагнитов. С целью уменьшения магнитного сопротивления между полюсами N и S (фигура 1) помещают железный цилиндр, на наружной части которого располагают проводники, а наконечникам полюсов N и S придают такую форму, при которой в междуже-лезном пространство магнита, индукция распределяется по закону синуса. Так как железное тело якоря подвергается периодическому перемагни- 2^ чиванию, то, в целях уменьшения потерь, сердечник якоря набирается из железных листов, изолируемых друг от друга бумагой или эмалевым лаком. Схема устройства такого Г. п. т. приведена на фигуре 4, а т. э. тц. V.
Фиг.
-L
Фигура 3.
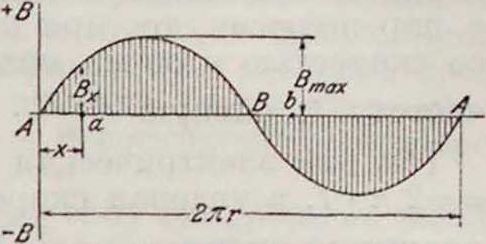
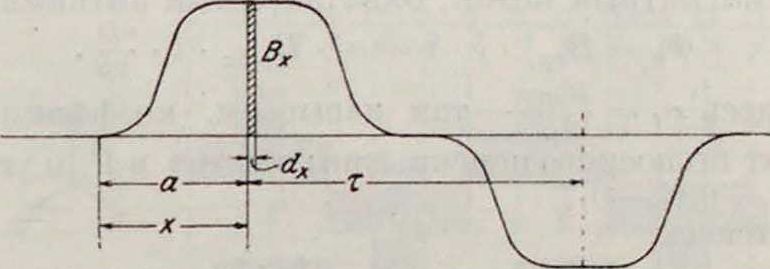
кривая фигура 5 изображает распределение магнитя, индукции в воздушном зазоре между полюсными башмака-ми и поверхностью якоря. Магнитная индукция воздушного зазора в месте, находящемся нарасстоянии х
А
Фигура 5.
по окружности от точки А, может быть выражена следующим образом:
Вт=В„
sin X.
Тогда, при равномерном движении проводов а и Ь по окружности с линейной скоростью
v=dx=г=г (о, в каждом из них наdt dt
водится эдс, равная е,=B.-1-V ΙΟ8=В
,-sin a-l-r-
da.
ΙΟ8 =
= Bnwx· I ·ν ω-sin α· ΙΟ8 вольт.
Таким образом, в витке действует эдс е=2«!=В,Ш1Х I 2г ш sin к 10~8 =
= Ф„Ш1 ω sin a 10-8 вольт, то есть эдс, изменяющаяся по закону синуса. Если в плоскости рамки лежит не один виток, а несколько последовательно соединенных между собой витков wlt то наводимая эдс получается равной е=103 =
= Ml Фп а максимальное равным
• ш sin « · 10~8 вольт, значение ее получается
Β,,ηχ tC1 · ω · Фпшх ·10=2г · f - гг·, · Ф · 10 ~8 вольт.
В технике посредством измерительных приборов учитывают обычно не максимальное значение напряжений, а т. н. э ф ф е к-тивное значение их, к-рое представляет
Фигура 6.
Фигура 7.
собою среднее квадратичное значение из мгновенных значений эдс. Для эдс, изменяющихся по закону синуса, эффективное значение равно 0,707 Е,„ах.
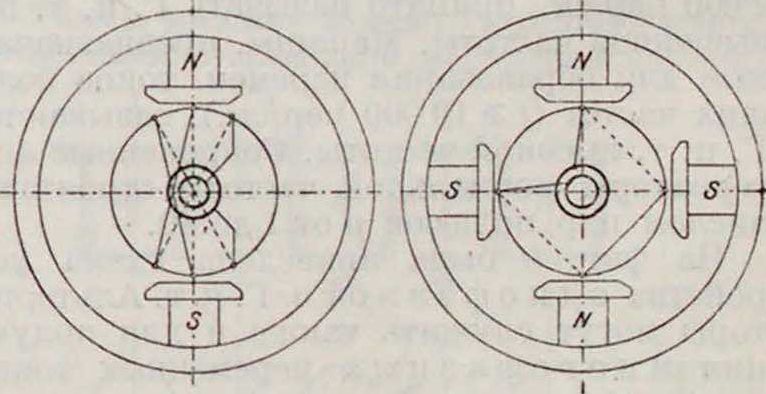
На фигуре 6 приведена схема устройства двуполюсного альтернатора. Для получения переменного тока с частотой f необходимо, чтобы якорь относительно магнитной системы вращался со скоростью /, об/ск., или со скоростью w=60/i об/м. Нетрудно понять, что для получения переменного тока той же
ΙΟ
частоты η четырехполюсном альтернаторе (фигура 7) требуется скорость вращения в два раза меньше, т. к. за период относительного перемещения проводников на двойное полюсное деление совершается полный цикл изменения эдс; следовательно, в данном случае, один полный оборот соответствует двум периодам изменения эдс. Если Г. п. т. имеет р пар полюсов, то, при вращении машины со скоростью и об/м., наводимая эдс имеет частоту f, равную —6Ц-П ·
Так как электрическая угловая скорость ω=2 я · f, а угловая скорость относительно вращения якоря ωΜ=*то между этими двумя величинами получается соотношение:
(о 2 π · 2 ρ·η о л
= · 30=— ---30=р. ИЛИ ω= и- ω„ ;
i» к · п 60п * ·
а отсюда следует, что поворот якоря по отношению к магнитной системе на угол соответствует изменению фазы электродвижущей силы на угол и=р-а1. Наведение эдс в якоре синхрон, машин обусловлено перемещением проводников в магнитном поле; при этом это наведение совершенно не зависит от того, двигаются ли проводники относительно неподвижной магнитной системы или сама магнитная система находится в движении, а якорь неподвижен. Поэтому синхронные машины могут выполняться: 1) с неподвижной магнитной системой и подвижным якорем и
2) с неподвижным якорем и вращающейся магнитной системой. Последний вид устройства получил наибольшее распространение, первый же тип применяется лишь в Г. п. т. небольшой мощности.
В Европе нормальной частотой переменного тока для осветительных и силовых установок является 50 пер/ск.; в Америке же за нормальную частоту принята частота в 60 пер/ск. В электрическ. тяге применяются токи частотой в 25, 162/3 и 15 пер/ск. В старых установках встречаются Г. п. т. частотой в 42, 40, 20 и 120 пер/ск. В радиотехнике употребляются альтернаторы частотой тока от 500 до 30 000 пер/ск. Альтернаторы, дающие переменные токи частотой от 500 до 2 000 пер/ск., принято называть Г.щ. т. повышенной частоты. Машины, предназначаемые для образования перемен, токов больших частот (/> 10 000 пер/ск.), называются Г. п. т. высокой частоты. Современные альтернаторы нормальной частоты строятся с числом нар полюсов р от 1 до 40.
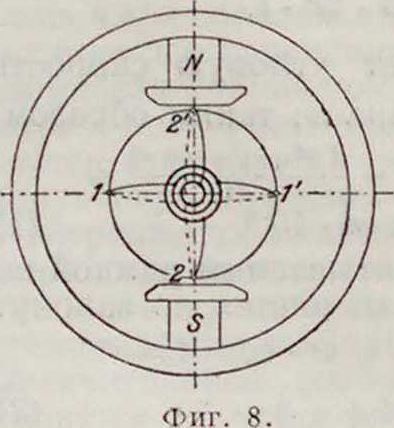
На фигуре 6 была приведена схема устройства о д и о фаз н о г о Г. п. т. Альтернаторы могут служить также и для получения много ф а з н ы х переменных токов, в частности двух- и трехфазного тока; с этой целью якорь альтернатора снабжается многофазной обмоткой. Двух ф а з н ы и альтернатор по своему устройству отличается от однофазного Г. и. т. тем, что обмотка якоря его составлена из двух однофазных обмоток, сдвинутых по отношению друг к другу на половину полюсн. деления, или полюсного шага (фигура 8). Вследствие такого расположения обмоток, наводимые в них эдс имеют сдвиг фаз в 90°, или разность фаз в V* периода. Фазные обмотки двухфазного альтернатора м. б. совершенно разобщены,
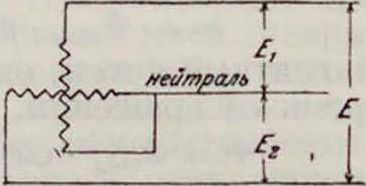
и тогда якорь снабжается четырьмя выводными зажимами; в большинстве же случаев два конца фазных обмоток соединяются между собой электрически и образуют так паз. нулевую точку, или нейтраль (фигура 9). В этом случае напряжение между свободными концами, или междуфазное напряжение Е, равно геометрической сумме фазных напряжений Е1 и Ег. Если Е1=Ец, то Е=]/2-Е1. Соединив электрически не концы, а середины двух однофазных обмоток, сдвинутых но отношению друг друга на половину полюсного деления, можно получить четы-рехфазную обмотку.
Фигура 9.
В трехфазных альтернаторах обмотка якоря состоит из трех однофазных обмоток, сдвинутых относительно друг друга на 2/3 полюсного деления. Так как перемещение обмоток относительно магнитной системы на два полюсных деления соответствует полному циклу изменения эдс, или 360 электрическим градусам, то, при вращении Г. п. т., в трех однофазных обмотках, смещенных друг относительно друга на 2/3 полюсного деления, наводятся эдс, отличающиеся по фазе на 120 электрическ. градусов, или на
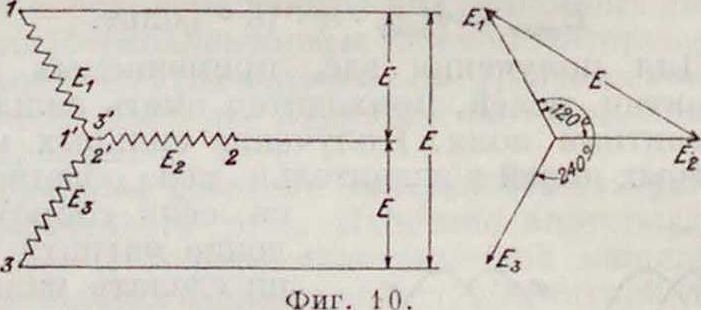
V» периода. Фазные обмотки трехфазн. альтернатора могут быть соединены в звезду или в треугольник. Присоединении в звезду все начала или все концы обмоток соединяются электрически между собою и образуют нулевую точку (фигура 10). При таком способе соединения, в случае равенства Е1=Е1=Е3,
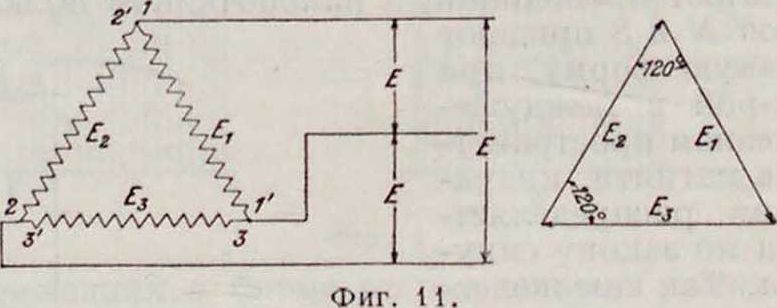
междуфазовое напряжение получается равным Е=У3 ·Εν На фигуре 11 изображена схема соединения обмоток в треугольник. В этом случае три однофазных обмотки якоря образуют замкнутую цепь, и только тогда, когда наводимые в каждой обмотке эдс строго равны между собой и отличаются по фазе на 120°, результирующая эдс в замкнутой цепи обмоток равна нулю; в противном же случае по обмоткам должен течь ток. Из схемы фигура 11 легко усмотреть, что линейное напряжение, или напряжение на зажимах Г. п. т., равно фазному напряжению, то есть, при Е1=Ег=Е3, Е=Е1=Ег—Еа. Обычно соединение обмоток в треугольник применяется в Г. и. т. низкого напряжения при больших силах токов. Отдельные фазные обмотки могут состоять из нескольких параллельных ветвей.
Классификация генераторов переменного тока. I. II о устройству магнитной системы различают: 1) Г. п. т. с неподвижной внешней магнитной системой и вращающимся внутри этой системы якорем; 2) Г. и. т. с неподвижным якорем, или статором, и вращающейся магнитной системой, или ротором.
1) Синхронные Г. п. т. с неподвижной магнитной системой и вращающимся якоре м строились ранее мощностью до 1 000 kVA; в настоящее время Г. п. т. подобного конструктивного типа выполняются мощностью не больше 150 kVA и напряжением не свыше 550 V. Обычной зке конструкцией для синхронных машин является конструкция с неподвижным якорем и вращающейся магнитной системой. У таких машин значительно лучше
разрешается вопрос о выводе тока, надлежащей изоляции и надежном механическом креплении обмоток.
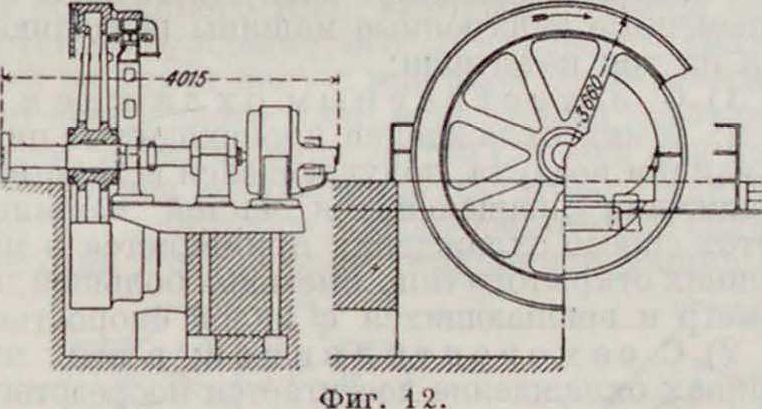
2) Синхро н н ые Г. п. т. с неп о-движпым якорем и вращающей-с я магнитной с и с т е м о й, в свою очередь, разделяются на следующие виды. а) Машины с внешним якорем и внутренней магнитной системой: этот вид устройства является наиболее распространенным, и такая конструкция считается нормальной для современных синхронных машин. По этому типу строятся как тихоходные, так и быстроходные машины. б) Машины с внешней магнитной системой и внутренним якорем: эта конструкция применяется в мпогополюсиых машинах, приводимых в движение от двигателей внутреннего сгорания. В тех случаях, когда маховик двигателя имеет большой диаметр, весьма рационально (с целью увеличения момента инерции) располагать магнитные полюсы на ободе маховика двигателя, а якорь располагать внутри магнитной системы. На фигуре 12 (размеры в мм) изображена схема устройства Г. п. т. подобной конструкции. в) Машины индукторного типа: отличительной особенностью этих машин является то, что вращающаяся многонолюсная маг
нитная система снабжается одной общей обмоткой возбуждения. Для осуществления идеи применения одной общей обмотки для всех полюсов магнитной системы в синхронных генераторах переменного полюсного типа приходится полюсным сердечникам придавать когтеобразный вид. Подобный тип магнитной системы применяется в настоящее время лишь в машинах специального назначения, например, в альтернаторах, служащих для питания радиоустановок и нагревательных и осветительных приборов на самолетах.
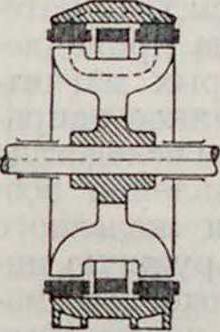
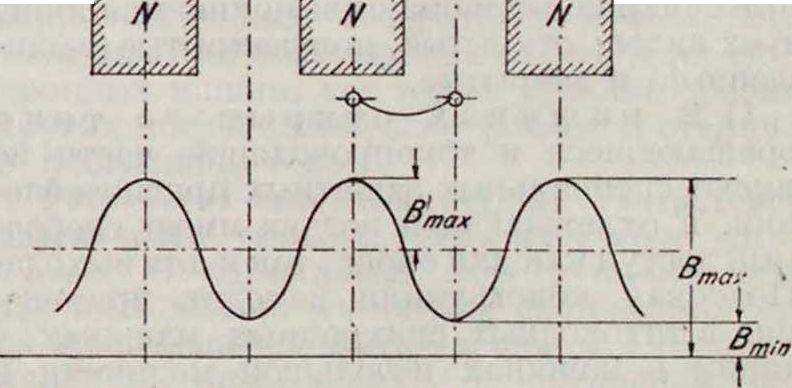
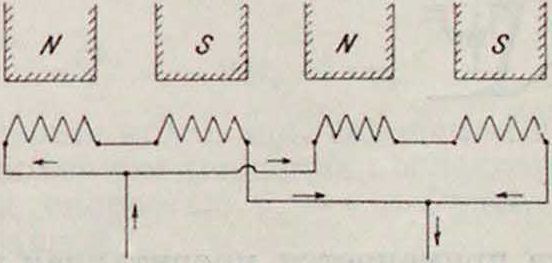
К индукторному типу синхронных машин принадлежат и машины, имеющие одноименно-полюсные магнитные системы (фигура 13). Обмотка возбуждения этих машин неподвижна, а оси полюсной магнитной системы расположены в двух • плоскостях, перпендикулярных к оси вращения, причем в каждой плоскости лежат оси одноименных полюсов. Якорь машины при таком устройстве магнитной системы состоит из двух частей; витки обмотки одной половины якоря находятся под действием лишь северных полюсов, а витки другой половины—под действием южных полюсов. При изучении кривой магнитной индукции в воздушном зазоре такой машины (фигура 14) легко усмотреть, что значение индукции колеблется между некоторым максимумом Втах (против выступа) и минимумом Bmin (против впадины), при этом Вт(п составляет обычно от 0,3 до 0,4 Втах. Если взять виток, активные стороны которого отстоят друг от друга на расстоянии половины полюсного деления, то в каждой стороне его при движении витка будет наводиться эдс, пропорциональная магнитной индукции, а результирующая эдс витка будет равняться разности эдс, наводимых в каждой активной стороне витка. Таким образом, при движении витка будут происходить изменения эдс в пределах, пропорциональных +{Вшах - Вт1„) и -СBmax-Bmin.).
1акую машину молено уподобить машине с переменно-полюсной магнитной системой,
I
Фигура 13.
: i ///////// i
Фигура 14.
имеющей число полюсов вдвое большее, чем у данной, и максимальную магнитную индукцию в воздушном зазоре
Нтяж ~ Нт1«
В =:
пах при чем В„ах составляет от 0,3 до 0,35 В„:
ах·
*10
В машинах, имеющих постоянно-полюсную магнитную систему, полный цикл изменения эдс происходит за период перемещения витка па 7, полюсного деления, поэтому при вращении такой машины со скоростью п об/м. частота колебаний эдс получается равной f="Р№ η, гдер—число одноименных полюсов или число пар всех полюсов.
Синхронные машины индукторного типа в магнитном отношении используются очень слабо, что и является недостатком подобного рода машин. В последнее время машины индукторного типа нашли широкое распространение в радиотелеграфии в качестве Г. п. т. повышенной и высокой частоты (для /’, равной от 500 до 30 000 пер/ск.). К категории машин индукторного типа принадлежат также и машины, в которых магнитная индукция, имеющая постоянное направление, подвергается колебаниям вследствие изменения магнитного сопротивления воздушного зазора при движении железного ротора, имеющего зубчатую наружную цилиндрическую поверхность. Подобные машины строятся для получения переменных токов звуковых частот. г) Турбогенераторы: синхронные машины этого типа предназначаются для сцепления с паровыми турбинами, вращающимися обычно с большими скоростями. Магнитная система турбогенераторов в большинстве случаев не имеет явно выраженных полюсов; она состоит из цилиндрического тела, на поверхности которого делаются впадины для укладки обмотки возбуждения. В машинах, имеющих магнитную систему с неявно выраженными полюсами, воздушный зазор между поверхностями статора и ротора получается одинаковый, и распределение в нем магнитной индукции зависит от соответствующего распределения обмотки возбуждения по поверхности ротора.
II. По способу расположения вала синхронные машины разделяются на вертикальные и горизонтальные. В большинстве случаев машины делаются с горизонтальным расположением вала; с вертикальными ватами I. п. т. выполняются лишь в тех случаях, когда они предназначаются для привода от вертикальных водяных турбин.
III. По способу защиты современные синхронные машины выполняются лишь трех видов: открытые, полузакрытые (защищенные) и закрытые.
1) В машинах открытого типа вращающиеся и токопроводящие части не имеют специальных защитных приспособлений, и охлаждающий воздух имеет свободный доступ как для входа, так и для выхода. Подобная конструкция находит применение в тихоходных синхронных машинах, а также в машинах небольшой мощности и средней скорости вращения.
2) М а ш и и ы защищенного типа имеют приспособления, благодаря которым затрудняется случайное соприкосновение или проникание внутрь машины посторонних тел. Заграждения устраиваются т. о., чтобы охлаждающий воздух создавал определен, ноток, омывающий все нагревающиеся части машины. К машинам этого типа принадлежат быстроходные Г. и. т. малых и средних мощностей, а также машины, снабженные щитовыми подшипниковыми крышками.
3) Машины закрытого типа устроены так. обр., что все токопроводящие и вращающиеся части заключены в закрытый кожух, а подвод и отвод охлаждающей среды (воздуха или другого газа) производится через особые отверстия, посредством труб, каналов или аналогичных приспособлений. Подобная конструкция применяется во всех быстроходных машинах большой мощности, для охлаждения которых необходимы большие количества воздуха. В машинах закрытого типа подвод охлаждающего воздуха можно производить не из машинного зала, а из других помещений или снаружи; благодаря этому обслулсивающий персонал не подвергается неприятному действию циркуляции воздуха, н уменьшается шум машин. Кроме того, при работе с машинами закрытого типа имеется возможность регулировать темп-ру машинного помещения: это достигается тем, что выходящий из машины нагретый воздух по желанию можно отводить наружу (летом) или впускать в помещения, которые необходимо обогревать. Обычно подвод охлаждающей среды производится посредством каналов, устраиваемых в фундаментах.
IV. II о способу охлаждения современные синхронные машины разделяются на три категории:
1) С естественным охлаждением; в них охлаждение происходит от циркуляции воздуха, получающейся вследствие движения вращающихся частей машины. Этот способ охлаждения применяется в машинах открытого типа,имеющих большой ди-аметр и вращающихся с малой скоростью.
2) С самовентиляцией; в этих машинах охлаждение достигается посредством воздуха или газа, приводимого в движение посредством вентилятора или какого-либо другого приспособления, составляющего одно целое с вращающейся частью машины. Подобный способ охлаждения применяется для большинства синхронных машин и, в частности, в машинах полузакрытого или закрытого типа.
3) С посторонним о х л а ж д е-н и е м; в этих случаях охлаждающая сра-да (газ или жидкость) подается вентиляторами или насосами, работающими независимо от машины. Синхронные машины с водяным охлаждением строятся редко, и в настоящее время этим способом охлаждения перестают пользоваться. Применение посто- * роннего вентилятора позволяет уменьшить потери на вентиляцию машины; к тому же вентилятор, приводимый в движение от постороннего двигателя, можно выполнить с более высоким кпд. Обычные вентиляторы, сидящие на валу синхронной машины, обладают весьма низким кпд, около 30%, тогда как отдельные вентиляторы конструируются более совершенно, и кпд в них достигает 60%. Увеличение кпд вентилятора имеет весьма существенное значение для больших машин, где потери на вентиляцию могут достигать больших размеров. Одним из видов постороннего охлаждения является охлаждение посредством замкнутой циркуляции газа (воздуха, водорода, метана), получающее в последнее время все большее и большее распространение и обладающее следующими достоинствами: а) отпадает необходимость устройства специальных фильтров для очистки охлаждающего газа;
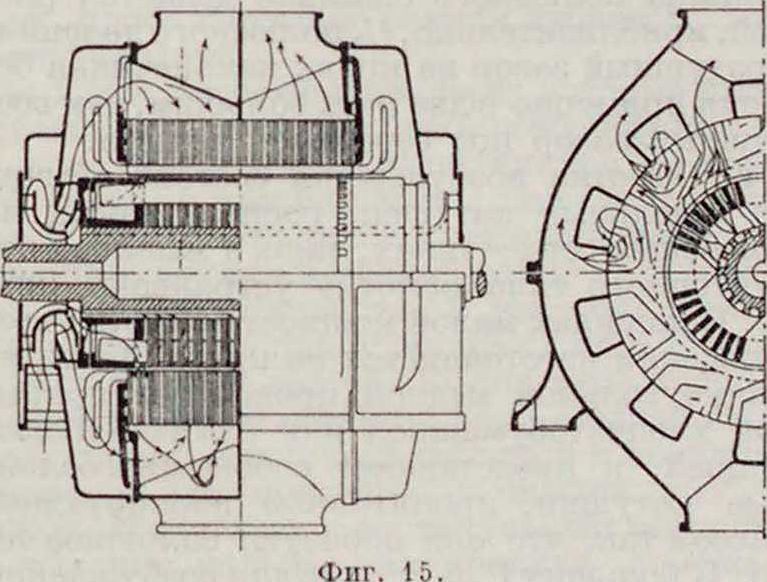
б) имеется возможность применения в качестве охлаждающей среды не только воздуха, по и других газов (иапр., водорода, метана); благодаря применению оолее теплоемких газов можно улучшить условия охлаждения; с другой стороны, благодаря применению газов, не содержащих кислорода, устраняются явления озонизации, способствующей разрушению изоляции; в) уменьшается опасность в отношении пожаров, так как ограничивается распространение пламени, а применение инертных газов для охлаждения совершенно устраняет возможность пожара; г) создается возможность использования тепла нагретого газа для подогрева, иапр., воды для питания котлов и отопительных систем. На фнг. 15 показано устройство одной из подобных систем охлаждения.
V. По способу возбуждения синхронные машины могут иметь собственное и постороннее возбуждение.
1) Машины с собственным возбуждение м имеют в качестве источника постоянного тока, которым питается обмотка возбуждения, особый генератор, сидящий на одном валу с машиной. Этот генератор постоянного тока, называемый возбудителем, имеет в большинстве случаев или параллельное возбуждение (шунтовое) или от другого шунтового генератора, обычно сидящего на том же валу синхронной машины.
II последнем случае возбудительная система состоит из двух возбудителей—главного и вспомогательного, и самый способ возбуждения называется каскадным (фигура 16). Достоинством собственного возбуждения является возможность более независимой регулировки напряжения. Регулировку напряжения можно осуществлять посредством изменения сопротивления, вводимого в цепь возбуждения синхронной машины, или путем изменения напряжения на зажимах возбудителя, что достигается регулировкой реостата, включаемого в шунтовую обмотку возбудителя. Т. к. для возбуждения больших машин требуется постоянный ток большой силы, то реостат цепи возбуждения синхронной машины приобретает громадные размеры; поэтому регулировку возбуждения предпочтительно производить посредством изменения напряжения на зажимах возбудителя (при помощи шунтового регулятора). При каскадном способе возбуждения регулировка возбуждения Г. п. т. производится главным обр. путем изменения напряжения на зажимах главного возбудителя; изменение же напряжения у последнего достигается, в свою очередь, регулировкой реостата главного возбудителя, включенного в цепь возбуждения, или регулировкой шунтового
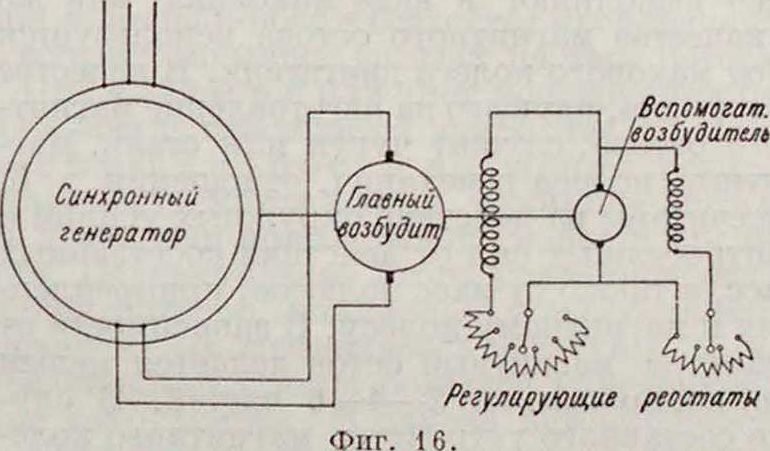
реостата вспомогательного возбудителя. Таким образом, при каскадном способе возбуждения имеется возможность более тонкой регулировки возбуждения синхронной машины; при этом регулирующие реостаты не имеют больших размеров, и сама регулировка возбуждения является более экономичной. Каскадный способ имеет преимущество еще и в том, что при нем устраняется возможность перемагничивания возбудителя, которое может наступить при внезапных коротких замыканиях синхронной машины. Недостатком способа собственного возбуждения является зависимость возбуждения Г. п.т., а следовательно и его действия, от исправности действия своего возбудителя.
2) М а ш и н ы с независ и м ы м во з-б у ж д е н и е м получают постоянный ток от аккумуляторных батарей, сети постоянного тока или особого генератора постоянного тока, приводимого в движение от постороннего двигателя. Независимое возбуждение находит применение лишь в тихоходных генераторах и в тех случаях, когда по соображениям экономичности и надежности действия наиболее выгодно использование отдельных генераторов постоянного тока как для возбуждения нескольких синхронных машин, так и для удовлетворения других потребностей электрической станции в постоянном токе.
Устройство основных деталей генераторов переменного тона. I. Магнитная система. В нормальных конструкциях синхронных машин магнитная система является вращающейся частью машины. Обычно в машинах, вращающихся с небольшой или средней скоростью, магнитная система устраивается с явно выраженным полюсом; синхронные же машины, приводимые в движение от паровых турбин, имеют неявно выраженные полюсы.
1) Магнитная система с явно выраженными полюсами состоит из следующих основных частей: а) остова,
б) полюсных сердечников, в) полюсных наконечников, г) обмотки возбуждения, д) демпферной обмотки и е) контактных колец. а) Обычно остов вращающейся магнитной системы выполняется в виде колеса, состоящего из обода, спиц и втулки с отверстием для вала; в некоторых же случаях магнитное колесо делается сплошным, и оно представляет собою набор стальных плит. Если Г. п. т. приводится в движение от поршневой машины (двигателя внутреннего сгорания, паровой машины), то, с целью уменьшения неравномерности хода, магнитное колесо выполняют в виде маховика, или же в качестве магнитного остова используется обод махового колеса двигателя. В качестве материала, идущего на изготовление магнитного остова, служит чугун или сталь. Магнитные колеса в механич. отношении должен быть рассчитаны на действие окружных усилий и центробежных сил от действия собственных масс, а также от масс полюсов, прикрепленных к магнитному колесу. В зависимости от диаметра магнитный остов делается целым или составным из 2—4—6 частей. В случае составного устройства магнитного колеса отдельные части его скрепляются посредством болтов и анкерных колец, причем
Фигура 17.
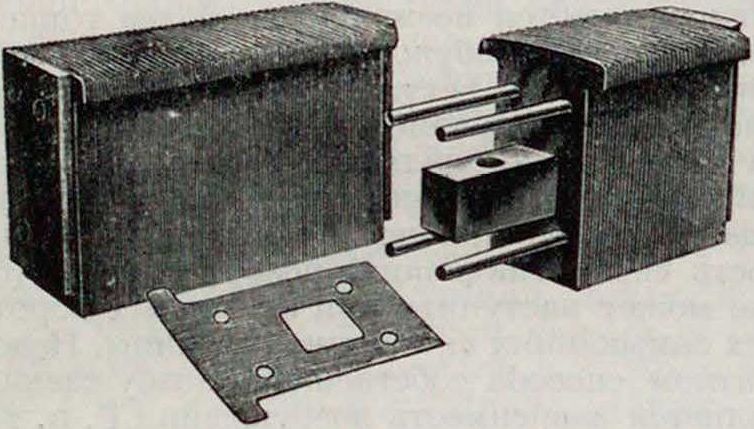
последние надеваются в нагретом состоянии. Спицы магнитного колеса располагаются в одном или двух рядах, в зависимости от осевой длины магнитного остова. При большой осевой длине, что имеет место для больших быстроходных машин, магнитный остов составляется из целого ряда отдельных колес со спицами или из отдельных толстых стальных плит. В машинах малого диаметра магнитный остов обычно выполняется из целого куска стали. б) Полюсные сердечники могут изготовляться как отдельная часть магнитной системы или же представлять одно целое с магнитным остовом. В последнем случае полюсные сердечники отливаются или отковываются вместе с магнитным остовом, в большинстве же случаев они изготовляются отдельно, из динамной стали. Крепление полюсных сердечников к магнитному остову производится по способу ласточкина хвоста или посредством болтов. Если полюсные сердечники изготовляются из тонкой динамной листовой стали, то для прикрепления их к остову применяется конструкция, изображенная на фигуре 17. Для улучшения условий охлаждения полюсные сердечники иногда снабжаются вентиляционными каналами. Поперечное сечение полюсных сердечников рассчитывается по допустимой магнитной индукции, нормальные значения этих индукций составляют 8 0004-10 000 максвеллам2. Высота сердечника обычно берется такой, чтобы при ней можно было разместить обмотку возбуждения. в) Полюсные наконечники могут представлять одно целое с полюсными сердечниками или выполняться отдельно от них. В качестве материала для полюсных наконечников применяется стальное литье, стальные плиты или динамная листовая сталь. Массивные полюсные наконечники применяются тогда, когда статор имеет закрытые или полузакрытые пазы; в тех случаях, когда статор выполнен с открытыми пазами или когда многофазный Г. п. т. предназначается для работы при несимметричной нагрузке, рекомендуется полюсные наконечники выполнять из листов динамной стали, изолированных друг от друга: такие же полюсные наконечники устраиваются и для однофазных Г. п. т. C целью уменьшения высших гармоник эдс, наводимых от зубцовых полей, края полюсных наконечников делают иногда не параллельными оси вала магнитной системы, а наклонными, или же полюсные наконечники располагают вдоль оси ступенями. Массивные полюсные башмаки прикрепляют к сердечникам посредством шурупов или делают свертными. Крепление полюс-hi,гх наконечников, набираемых из листовой стали, производится по способу ласточкина хвоста или стягиванием болтами между двумя щеками. Полюсным наконечникам придают определенную форму с целью получения синусоидального распределения магнитной индукции в воздушном зазоре. Ширина полюсного башмака делается равной, приблизительно, 2/з полюсного деления. Воздушный зазор на краях наконечника берется примерно в два раза ббльшим, чем воздушный зазор под серединой полюса. г) Обмотка возбуждения состоит обычно из отдельных катушек, располагаемых на полюсных сердечниках; лишь в машинах индукторного типа обмотку устраивают иначе. В машинах малой мощности обмотка возбуждения изготовляется из круглой или из прямоугольной медной проволоки, покрытой хлопчатобумажной или бумажной изоляцией, и представляет собою многослойные катушки, пропитанные изолирующей массой так, что они образуют сплошное тело. В больших Г. п. т., где для возбуждения приходится применять большие токи, обмотка выполняется из голой медной ленты, причем все витки располагаются в один слой. Изоляция между отдельными витками осуществляется путем прокладки пропитанного лаком прессшпана или асбеста, а также миканита, изоляция обмотки возбуждения по отношению к корпусу магнитной системы—посредством прокладки шайб и гильз из прессшпана или, в особых случаях, из асбеста. Для увеличения поверхности охлаждения обмотки возбуждения наружные края медной ленты делаются скошенными. В роторах, вращающихся с большими скоростями, между двумя соседними катушками вставляются распорки, предохраняющие витки от соприкосновения под действием центробежной силы. Отдельные катушки возбуждения, как правило, соединяются между собой последовательно; при этом соединение концов обмоток производится посредством пайки, а при больших сечениях проводников—при помощи болтов. Для присоединения концов обмотки возбуждения к контактным кольцам применяются изолированный кабель или медные шины, которые прокладываются но магнитному колесу и валу и надежным образом на них закрепляются. д) Демпферные обмотки применяются гл. образом в однофазных Г. п. т. и служат для компенсации инверсного (обратно вращающегося) поля. Демпферные обмотки в однофазных Г. и. т. выполняются в виде колец, закладываемых под полюсными башмаками, и стержней, проходящих через соответствующие отверстия в полюсных наконечниках. Эти стержни с обеих торцевых сторон надежно электрически соединяются с кольцами; такое соединение должно производиться посредством пайки или автогенной сварки. В качестве материала для демпферных стержней служит красная медь; соединительные торцевые кольца выполняются из желтой меди. Подполюсиые кольца делаются из меди или алюминия. В трехфазных Г. п. т. демпферные обмотки находят применение в тех случаях, когда ставятся повышенные требования в отношении устойчивости параллельной работы, а также для устранения электрических колебаний высшего порядка, наступающих при однофазных коротких замыканиях и могущих повести к перенапряжениям вследствие возможного резонанса. Обычно на каждом полюсе размещают от 10 до 16 стержней; при этом демпферные стержни располагаются друг от друга на расстоянии, приблизительно равном зубцевому делению статора. е) Контактные кольца, через которые происходит подвод тока в цепь возбуждения, в большинстве случаев выполняются из ковкой стали, а при больших размерах их—из литой стали. Эти кольца насаживаются на чугунные втулки и изолируются от последних помощью миканита. В некоторых случаях, для удобства снимания, кольца делаются из двух частей. Контактные кольца обычно располагаются на валу с одной стороны, менаду магнитной системой и подшипником, около которого находится возбудитель. В машинах с вертикальным ротором контактные кольца, как правило, помещаются между ротором и нижним направляющим подшипником. В исключительных же случаях вертикальные машины имеют расположение колец на верхнем конце вала, выше опорного подшипника или поверх возбудителя; при этом соединительные провода, идущие от возбудителя к концам обмотки возбуждения, пропускаются через отверстие, высверленное для этой цели в вал> Г. п. т. Подвод тока к контактным кольцам производится посредством мягких угольных, графитных или медно-графитных щеток.
2) Магнитная система с неяв-н о в ы р а ж е н н ы ми полюса м и выполняется в виде цилиндрического ротора. Эта часть является наиболее ответственной деталью быстроходных машин (турбогенера торов). Магнитная система этих машин представляет во многих случаях одно целое с валом и выполняется из специальн. высокосортной магнитной стали; в теле ротора делаются пазы, в которых располагается обмотка, а также отверстия и каналы для вентиляции. Роторы большого диаметра выполняются иногда из отдельных стальных листов толщиной в 40—60 миллиметров. Зубцы ротора или представляют одно целое с магнитным сердечником или делаются вставными; в последнем случае зубцы изготовляются из листовой динамной стали, в виде отдельных пакетов; эти зубцы имеют ласточкин хвост, при помощи которого и создается крепление их в соответствующих гнездах на теле ротора.
При выборе той или иной конструкции ротора всегда приходится учитывать критическую скорость вращения ротора. Обычно стремятся к тому, чтобы она лежала за пределами номинальной скорости вращения. Осуществление этого условия в отношении роторов, номинальная скорость вращения которых составляет 3 000—3 600 об/м., представляет иногда большие конструктивные затруднения. В случае невозможности выполнения этого условия ротор конструируется так, чтобы его первая критическая скорость для машин, вращающихся со скоростью в 3 000 об/м., была около 1 800— 2 000 об/м. Пазы, в которые закладывается обмотка возбуждения, располагают или в радиальном направлении или в параллельных плоскостях, перпендикулярных к оси полюсов. Первый вид пазов является более распространенным; при устройстве их имеется возможность закладывать обмотку, выполненную по шаблону. Пазы распределяются равномерно по всей окружности или на части ее (на 2/з или 4/s окружности). Число пазов и способ расположения их выбираются таким образом, чтобы получилось по возможности синусоидальное распределение магнитной индукции.
С целью лучшего охлаждения ротора, а также для получения определенного магнитного насыщения, зубцы ротора иногда снабжают прорезами и отверстиями; кроме того, под пазом делается осевое отверстие.
Обмотка ротора обычно изготовляется из медной ленты, покрытой хлопчатобумажной изоляцией; обмотка в пазах располагается в 1 или 2 ряда. Изоляция обмотки от тела ротора производится посредством прессшпана. Укрепление обмотки в пазах осуществляется посредством металлических клиньев; в качестве материала для клиньев применяется диамагнитная сталь, обладающая большой электрической проводимостью, или бронза с малым уд. сопротивлением. Головки обмоток закрываются посредством капотов, удерживающих головки от изгиба под действием центробежной силы. Эти капоты должны обладать надлежащей механической прочностью, для чего они выполняются из специальных сортов стали. С целью уменьшения магнитного рассеяния сталь, идущая на изготовление капотов, должна быть диамагнитной. Металлические клинья должны иметь хорошее электрическое соединение с капотами; для достижения этого приходится прибегать к специальным конструкциям.
Металлические клинья, будучи электрически связаны с капотами, образуют сильную демпферную обмотку η виде беличьего колеса и в значительной мере способствуют устранению перенапряжений и влияний обратповра-щающихся полей при однофазных коротких замыканиях.
Контактные кольца располагаются по одну или обе стороны ротора; они обычно выполняются из сименс-мартеновской стали.
Распределение обмотки возбуждения производится таким образом, чтобы кривая магнитной индукции в воздушн. зазоре получилась по возможности синусоидальной. Обычно обмотка возбуждения размещается на !/з окружности; при
Г
Фигура 18.
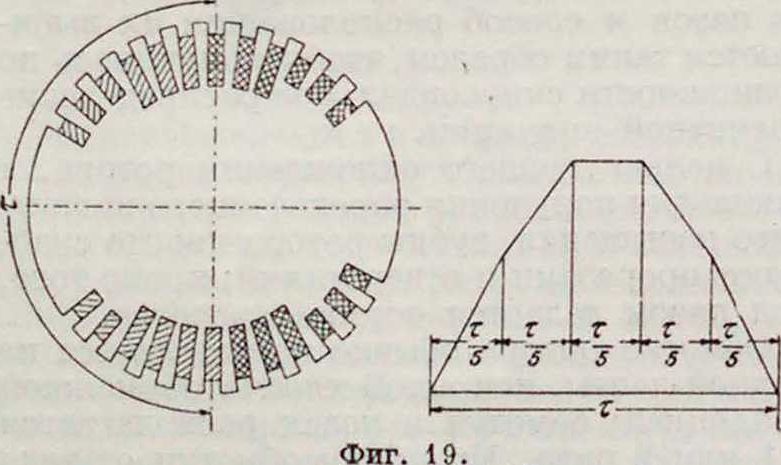
таком расположении кривая магнитодвижущей силы имеет вид ступенчатой трапеции (фигура 18). Заксом (Sachs) предложено производить распределение витков обмотки возбуждения на Vs окружности ротора, причем витки, приходящиеся на каждый полюс, распределять на две части: одну, содержащую в себе 0,617 всех витков, располагать в крайних, более глубоких пазах, а другую—во внутренних (фигура 19). При подобном распределении витков является возможность получить такую магнитную индукцию в воздушном зазоре, кривая которой весьма близко подходит к синусоиде.
При изготовлении вращающейся магнитной системы быстроходных машин, ротора, приходится обращать особенное внимание
на уравновешенность всей системы как в механическом, так и в магнитном отношениях. Неуравновешенные роторы могут вызвать, в особенности в быстроходных машинах, сильные вибрации, делающие дальнейшую работу машины невозможной. Для достижения полной механическ. уравновешенности роторы подвергаются как статической, так и динамической балансировке. С целью достижения магнитной уравновешенности приходится обращать внимание на точность механической обработки и сборки и на однородность применяемых материалов.
Вращающаяся магнитная система, ротор, является одной из наиболее ответственных частей Г. п. т. В современных синхронных машинах окружные скорости достигают 140—155 м/ск. при таких скоростях враща ющиеся части подвергаются большим разрывным усилиям, и неудачная конструкция, несоответствующий подбор материала могут явиться причиной крупных катастроф.
С целью поверки механич. прочности вращающаяся магнитная система подвергается испытанию «на разнос». Это испытание производится при повышенной скорости;согласно нормам, скорость вращения при испытании на разнос устанавливается равной:
а) для Г. п.т., приводимых в движение паровыми турбинами, двигателями внутреннего сгорания,—125% от номинальной, б) для Г. и. т., приводимых в движение от водяных турбин,—180% от номинальной. Испытание на разнос производится в специальных помещениях или ямах.
II. Якорная система. Якорь синхронных Г. π. т., имеющих нормальную конструкцию, делается неподвижным и поэтому является статором машины. Статор состоит из станины, сердечника якоря и обмотки. В зависимости от размера машины статор выполняется целым или составным из 2—3—4 частей.
1) Станина изготовляется из чугуна; она является остовом тела якоря и в то же время служит частью кожуха машины. Обычно в станине машины устраивают каналы и отверстия для подвода и отвода воздуха или газа, служащего для вентиляции машины.
2) Сердечник якоря набирается из сегментов листовой динамной стали, толщиной в 0,5 миллиметров, в редких случаях—в 0,35 миллиметров. Листы этой стали оклеивают с одной стороны тонкой бумагой, с целью изолирования их друг от друга, для уменьшения токов Фуко. В Г. п. т. повышенной частоты сердечник якоря изготовляется из весьма тонких листов (толщиной от 0,1 миллиметров и менее) мягкого железа, обладающего малыми потерями на гистерезис. Обычно сердечник якоря составляется из отдельных пакетов, шириной от 40 до 60 миллиметров; на внутренней цилиндрической поверхности сердечника якоря делают прорезы или пазы, в которых располагают обмотку якоря. Пазы бывают трех видов: открытые, полузакрытые и закрытые. Достоинство закрытых пазов состоит в том, что при наличии их поле в воздушном зазоре получается более равномерным, благодаря чему уменьшаются потери от пульсации магнитного потока; недостатком же закрытых пазов является затруднительность закладки обмотки в эти пазы. При открытых пазах имеется возможность применения шаблонной обмотки, что в значительной мере упрощает и удешевляет изготовление ее. Так как открытые пазы вызывают сильные пульсации магнитного потока, то для уменьшения этих пульсаций между головками зубцов вставляют клинья, набираемые из листовой динамной стали. Конструкция паза оказывает влияние на индуктивное сопротивление обмотки, обусловленное рассеянием потока в пазу и между головками зубцов. Закрытью и полузакрытые пазы, а также пазы, снабженные железными клиньями, создают для потоков рассеяния бблыную проводимость, чем открытые пазы. В нек-рых случаях, с целью увеличения индуктивного сопротнв-
ления обмотки якоря, пазам придают более сложную форму. Тогда паз делается из двух частей, из которых одна предназначена для размещения обмотки, а другая служит для увеличения проводимости потоков рассеяния. Для охлаждения сердечника якоря и его обмотки в теле сердечника делаются в осевом направлении отверстия, а между отдельными пакетами оставляются щели.
2) Обмотка якоря. По конструктивному выполнению обмотки якоря синхронных машин бывают двух видов: стержневые и катушечные. Обычно стержневые о б-мотки применяются в тех случаях, когда в одном пазу располагают только одну или две стороны витков обмотки; такие обмотки употребляются для сил тока от 600
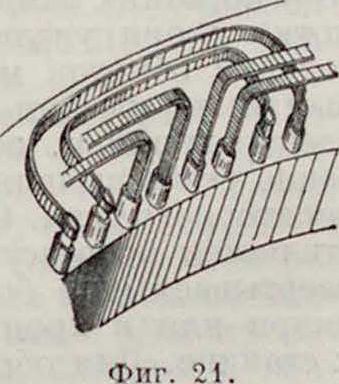
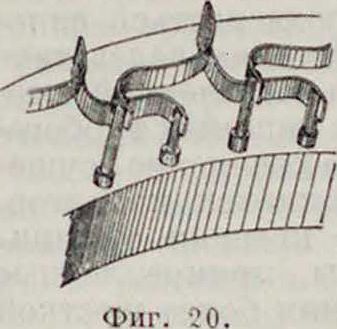
до 1 000 А и более; при этом стержни обмотки изолируются на полное напряжение. Стержневая обмотка чаще всего располагается в полузакрытых пазах. Лобовые соединения в стержневой обмотке имеют вилкообразную (фигура 20) или дугообразную форму (фигура 21). Если поперечное сечение стержней превосходит 300—100 с.м, то для уменьшения дополнительных потерь стержни выполняются в виде кабеля из отдельных тонких полос, сплетенных между собой определенным образом. Конструкция таких плетеных стержней представлена на фигуре 22. Катушечные обмотки применяются для машин высокого напряжения. Катушечная обмотка выполняется вручную и по шаблону. Намотка витков вручную производится обычно тогда, когда якорь снабжен
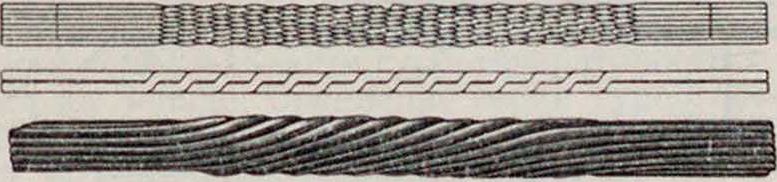
Фигура 22.
закрытыми или полузакрытыми пазами; такой способ выполнения обмотки ограничивается применением в машинах небольшой и средней мощности, напряжением до 5 000— 6 000 V. Шаблонная катушечная обмотка, в зависимости от предполагаемого способа закладки ее в пазах, выполняется в виде иолувитков (разрезанной с одной стороны катушки) или же в виде целых катушек.
Первый вид шаблонных обмоток применяется для якорей с закрытыми или полузакрытыми пазами. Разрезанные витки таких обмоток после закладки в пазы соединяют между собой путем пайки или сварки, а обнаженные части их затем хорошо изолируют.
Фигура 23.
Такие обмотки применяются для напряжения до 8 000—10 000 V. Цельные шаблонные катушки могут закладываться и в полузакрытые пазы тогда, когда ширина прореза паза такова, что неизогнутая часть катушки может свободно проходить по этому прорезу. Такие обмотки находят применение гл. обр. в четырехполюсных машинах и для напряжений до 8 000 V. Шаблонные обмотки, закладываемые в открытых пазах, бывают заранее полностью изолированными; они применяются в машинах большой мощности, с напряжением до 30 000 V. Обмотка якоря может располагаться в один или два слоя, причем двуслойное расположение находит место гл. обр. в стержневых обмотках и в катушечных, выполненных по типу обмоток
постоянного тока. В многофазных машинах обмотку располагают равномерно по всей цилиндрич. поверхности сердечника якоря.


Фигура 25.
В однофазных же машинах обмотка размещается лишь на Vs окружности. Средний шаг обмотки якоря обыкновенно делают равным полюсному делению. За последнее время, с целью уменьшения пульсаций от магнитного потока, вызванных реакцией якоря, обмотка якоря выполняется с укоро-„ ценным шагом, от
- Привод от паровой турбине ·
- Привод турбины
kVA
гооооо
Привод от водяной турби,
ои I
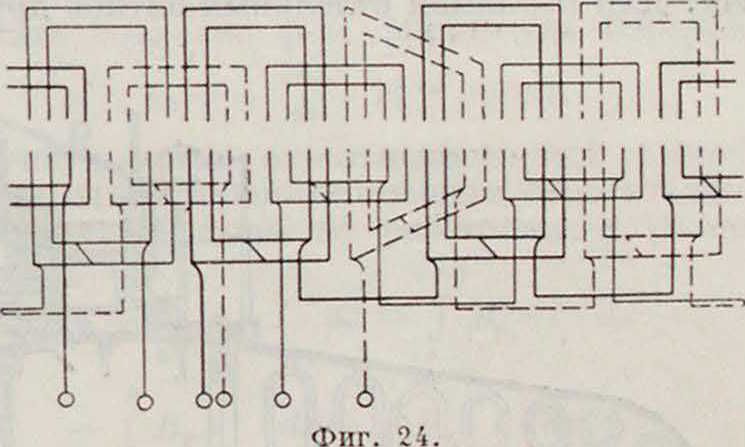
0,7 до 0,8 полюсного деления. Головки обмоток располагаются в два или в три этажа. Схема расположения двухэтажных обмоток изображена на фигуре 23. Па фигура 24 представлена одна из схем соединений типичных обмоток, употребляемых для синхронных Г. п. т. Обмотки якоря могут соединяться из одной или несколь * 3
ких параллельных ветвей. В большинстве случаев число параллельных ветвей ограничивается двумя; при этом параллельные соединения ветвей осуществляются по схемам фигура 25.
3) Изоляция обмотки якоря по отношению к телу сердечника, а также витков ее друг от друга и отдельных частей обмотки одной фазы по отношению к частям обмотки другой, представляет сложную задачу. Для изоляции отдельных витков друг
Годы
1302<* »6 06 ю 12 н 16 а 20 Фигура 26.
лось пространств, заполненных воздухом; при наличии последнего, вследствие озонизации, происходит разрушение изоляции. Изоляция обмоток не должен быть восприимчивой к влаге и портиться под действием воды и к-ты. Изоляция головок обмоток достигается тем, что стороны катушек располагают па определенном расстоянии друг от друга, а места скрещивания сторон катушек двух разноимеп. фаз изолируются прокладками.
4) Закрепление обмотки в пазах производится в большинстве случаев посредством клиньев из динамной листовой стали или же из пропитанного маслом или ком-паундной массой дерева (бук). На крепление головок (лобовых частей) обмотки якоря приходится обращать особенное внимание. При коротких замыканиях, когда ток в обмотке якоря увеличивается в 10—15 раз, головки обмоток могут подвергаться сильным механическим воздействиям вследствие элоктродииамич. эффекта. Последний особенно резко выявляется в машинах турбогенераторного типа. Обычно крепление осуществляется посредством накладок и болтов, ввертываемых в боковые крышки станины якоря или в кронштейны, прикрепленные к станине. Для образования более жесткой системы крепления иногда все накладки механически связываются между собой посредством колец. В тихоходных машинах, вследствие небольшого электродинамич. действия естественная жесткость головок обмоток
от друга применяется пропитанная хлопчатобумажная оплетка в один или два слоя. Изоляция витков по отношению к поверхности паза осуществляется посредством мика-нитовых или слюдяных гильз. Изолированные катушки после пропитки должен быть хорошо спрессованы, чтобы внутри не образовыва-
бывает достаточной для того, чтобы противостоять механическим силам, возникающим при мгновенном коротком замыкании.
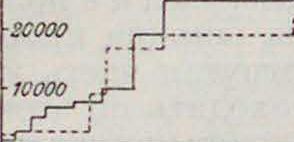
Развитие мощности генераторов переменного тона. На фигуре 20 представлены диаграммы, иллюстрирующие непрерывный рост единичной мощности Г. п. т., приводимых в движение паровыми и водяными турбина- ι ми. Максимальные значения мощностей современных Г. π. т. приведены в таблице 1.
Т а б л. iП редели м о ш пости п о с т р о е и-и ы х турбо- и г и д р о г е н е р а т о р о в.
| Скорость вращения | Мощность в kVA |
| Турбогенераторы: | |
| 3 000 об/м. | 50 000 |
| 1 800 » | 88 000 |
| 1 500 » | 100 000 |
| 1 200 » | 160 000 |
| Гидрогенераторы: | |
| 500—300 об/М. | 50 000 |
| 150— 75 *> | 65 000 |
Наибольшая мощность Г. и. т., приводимых в движение двигателями Дизеля, в настоящее время 13 000 kVA
Развитие генераторостроения в СССР. Производство турбогенераторов в СССР сосредоточено на заводе «Электросила» в Ленинграде.
После всестороннего изучения вопроса о наиболее целесообразном типе турбогенератора для производственных и эксплуат-онных условий в СССР, завод «Электросила» остановился на типе, близком к конструкции Броун-Бовери, характеризуемом применением массивного ротора с фрезиро-ванными пазами для обмотки возбуждения и двусторонней радиальной вентиляцией. Главнейшие преимущества массивного ротора: а) напряжения в поковке массивного ротора, при прочих равных условиях, меньше, чем в роторе со вставными зубцами; б) массивный ротор проще по конструкции, дешевле в производстве и удобнее для ремонта; в) энергия, потребная для возбуждения, при прочих равных условиях, для массивного ротора меньше, так как он имеет преимущества в магнитном и в электрическом отношении перед ротором со вставными зубцами. Двусторонняя радиальная вентиляция имеет преимущества перед другими системами в отношении минимума гидравлического сопротивления и одинакового нагрева воздуха по отдельным струям. Вентиляция железа статора особенно активна, благодаря специальной конструкции (завода«Электросила») воздухопроводов в статорном железе.
Строящаяся в настоящее время на заводе «Электросила» серия турбогенераторов имеет 7 диаметров и дает, благодаря вариации длин, 18 типов по мощности. При проектировании серии были учтены современные достижения в области турбогенераторострое-ния на Западе. Сравнение серии турбогенераторов завода «Электросила» с наилучшими заграничными сериями приводит к следующим выводам: 1) машинные постоянные для русской новой серин машин мало разнятся от машинных постоянных заграничных серий; 2) разница в весах для турбогенераторов относительно малых мощностей (до 5 000 kVA) объясняется применением за границей сварных корпусов и весьма тонкостенного чугунного литья; 3) кпд турбогенераторов завода «Электросила», по испытаниям согласно нормам, выше гарантируемых заграничными заводами на 0,5 — 1,0%.
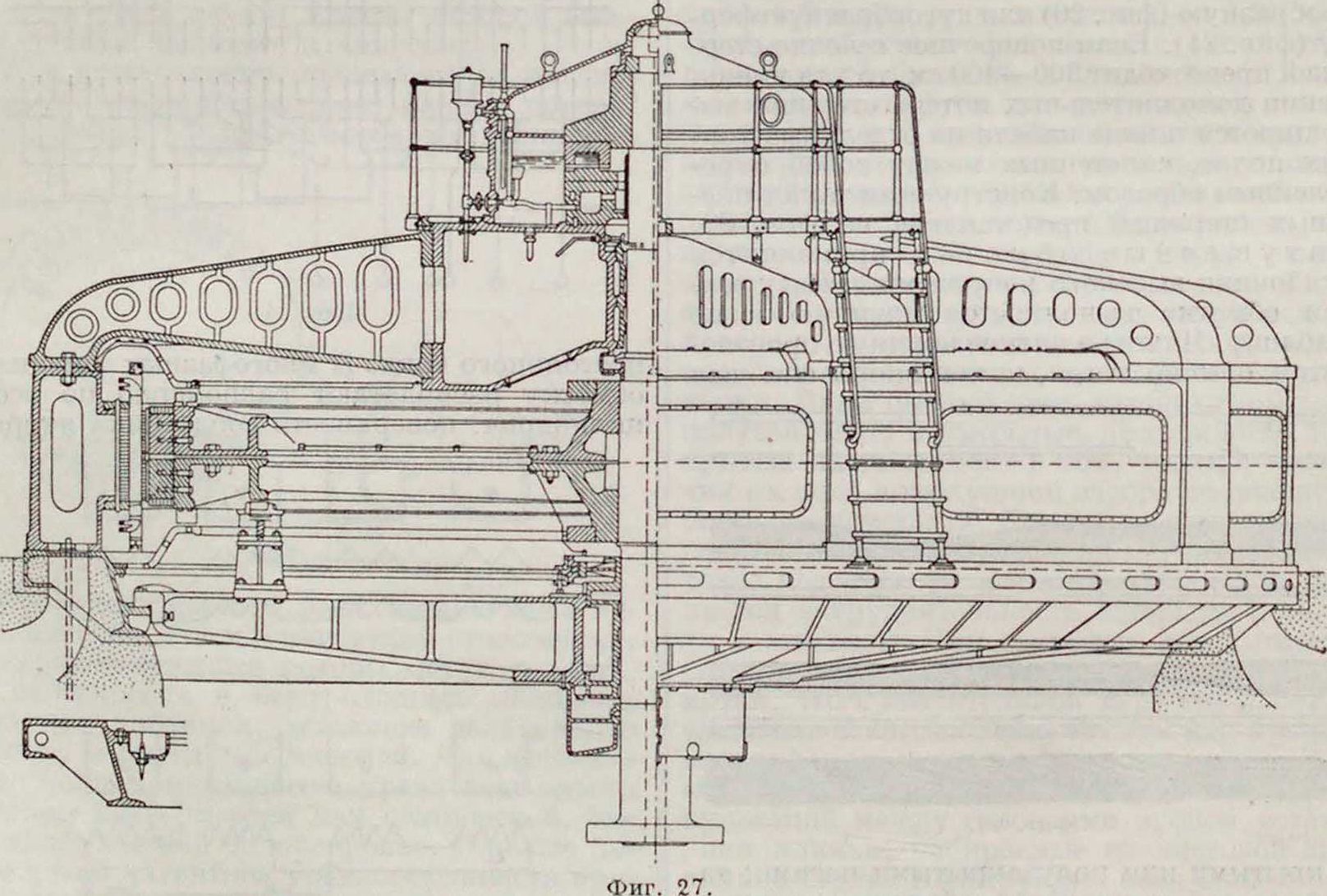
Постройка гидрогенераторов производится на заводах «Электросила» и харьковском электромеханическом. За последние годы большинство гидрогенераторных станций, построенных в СССР, снабжаются Г. п. т. отечественного производства. На фигуре 27 приведены чертежи волховских Г. п. т., построенных на заводах Государственного электротехнического треста (ГЭТ); эти Г. п. т. по своей мощности, при скорости вращения 75 об/м., являются одними из наибольших в Европе (8 750 kVA).
Рабочий процесс генератора переменного тока. I. Наведение эдс в обмотке якоря. Если распределение магнитной индукции вдоль воздушного зазора представить в виде кривой, изображенной на фигуре 28, то
Фигура 28.
в прямоугольном витке, имеющем длину в осевом направлении I см, а ширину τ см, равную полюсному делению, при его движении наводится эдс, значение которой можно определить согласно формуле Максвелла-Фарадея:
е„=— d^‘ 10 ~8 вольт.
Магнитя, поток, охватываемый этой рамкой, когда одна сторона ее смещена относительно нейтральной зоны на расстояние а, равен:
Т + Я T-f-Я
Фа=JT Вх 1 dx=J Вх · I · dx —
а υ
— J Вх I dx=J В х I dx +
о о а
+ Вх I .· (кс — J Вх I dx =
а
— Const — 2 j’ Вх I dx.
О
Отсюда следует, что так как то
d Фаdt
= 2 Вт l
dx dt ’
dx_
dt ~~
d*a
dt
-2Bx I - vx.
Па основании этого, эдс, наводимая в витке при равномерном движении последнего с постоянной скоростью νχ — υ — Const, получается равной е=— · 10-8=2Вх I · V · 10‘3 вольт.
Если обмотка состоит не из одного витка, а из w витков, а синхронная машина имеет γ пар полюсов, то мгновенное значение эдс е=2Вх I w р · V 10-* вольт. (1)
Мгновенное значение е приобретает максимум тогда, когда Вх=Втах, то есть, когда стороны рамки располагаются под серединой полюсов; в этом случае е — етах=2В„тх I w р v · 10-8 вольт.
Если бы в тех же пазах под каждой парой полюсов находилось q катушек, то максимальное значение эдс было бы в q раз больше, то есть
Е„
I
Jmax Q Cirar wax - - V W ·ρ q
Так как линейная скорость проводников v=п, где D—диаметр якоря, то D п
p-w-q-
60
Е =27?. 7. ~с ·
^max max ‘
60
10-8 вольт. (2)
10 "8 вольт.
П
В свою очередь, частота тока равна f=а магнитный поток, охватываемый витками,
61)
фа=Вер. I т=«i Втах · I
r.D
2р
Здесь «г=—так называем, коэффици-
Нтах ент полюсного перекрытия; обычно в Г. п. т. гг,-=0,65—0,7.
Отсюда
Втах I π · D =.
На основании этого
Етю=4 · ± · q w f Фа 10”8 вольт. (3)
В технике обычно посредством измерительных приборов учитывается не максимальное значение напряжений, а так называемым эффективное значение, которое представляет собою среднее значение квадратов мгновенных значений эдс за полный период, то есть
•-V ύ’···
dt
Если кривая эдс симметрична относительно оси абсцисс, то
•-Vi.
Tit
Sе2
dt
или
— ~г J’ (2ИГ I tv · р v q 10-)· dt =
υ
= 1- w· ρ ν q ΙΟ-8]/! J’ В-
dx.
Величинуj * Jbx dx можно предста вить как некоторую долю от В„
то есть
’ /в| · dx=/;„
В„
где fmm, т. н. амплитудный коэфф.,—отношение эфф. значения к макс, значению. На основании этих выводов
В — 4 ^тах.
q · f Φα· 10-8 вольт. (4)
Отношение
fmax
_ В эфф.
-эф/ф.
Вшах ^ср. BCpt ^В
представляет собою не что иное, как коэфф. формы кривой магнитной индукции; т. о. Е=4 /д · w q f Фа 108 вольт. (5)
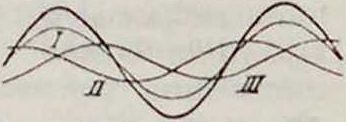
Формула (1) показывает, что кривая имеет ту же форму кривой, что и кривая магнитной индукции Вх =f(x)=f(v,i)=у(г), в том случае, когда активные стороны витков q катушек не смещены относительно друг друга. При практическом же осуществлении Г. п. т. стороны катушек распределяются равномерно по всей поверхности или на части цилиндрической поверхности тела якоря, причем в этом случае стороны витков или катушек сдвинуты по отношению друг к другу па некоторый угол. При одновременном изменении положения всех катушек относительно магнитного поля, в витках отдельных катушек наводятся эдс, отличающиеся по фазе.
На фигуре 29 изображены кривые эдс для каждой катушки и кривая результирующей эдс для случая, когда катушки соединены последовательно. Вследствие сдвига фаз эдс, наводимых в отдельных катушках, максимальное значение результирующей эдс при последовательном соединении катушек получается меньше суммы максим, значений эдс всех отдельных катушек, то есть ЕГтах < Σ Етах, или Eriax<q-Emax. Точно так же и эфф. значение результирующей эдс меньше суммы эфф. значения эдс всех отдельных катушек, то есть Ег < У, Е, или Ег < q-E. Эфф. значение эдс можно представить себе как некоторую долю от q Е, то есть
Er=fw-q· Е. (6)
Величина f„ зависит от q и угла /9, на к-рый сдвинуты отдельные катушки относительно друг друга, то есть от способа расположения обмотки; эта величина носит название обмоточного к о э ф ф-т а.
Если Q—число пазов, приходящихся на одни полюс, то ,9= q,. В машинах однофазных из Q пазов лишь q пазов занято обмоткой, а остальные Q—q пазов остаются незаполненными. В многофазных Г. п. т. с числом фаз т проводники обмотки равномерно распределяются во всех пазах,при чем m-q=Q, и в этом случае β —
° 1 т q *
Пользуясь формулой (5), можно написать следующее выражение для эффективного значения результирующей эдс, наводимой в последовательно соединенных катушках, стороны которых расположены в 2q пазах:
Е=4 fw гв f w q Ф 108 вольт; т. к. q w—общее число витков обмотки, то
Фигура 30.
Фигура 29.
E=4fB-fw-f- w Ф · КГ8 =
= 4 к fw Ф 108 вольт;
здесь произведение fB-fw — к называется коэффициентом Каппа.
Для синусоидальной формы кривой магнитной индукции
Для кривой другой формы этот коэфф. м. б. определен графич. или аналитич. методом, при этом кривая магнитной индукции разлагается на основную волну и высшие гармоники. Если В, Вз, В5 ., B^ —соот-
1тах *тах °пшх шах ветственно амплитуды основной волны, 3-и, 5-й, 7-й гармоник, то
Взфф. — У В‘ + В
1эфф. Лэфф.
Вводя обозначения
Ьз - В, ’
Bl
ьзфф.
Bl
афф.
В,
Dt
i.__ ^7max.
•nuirr.
К — в,
получают
Вмфф.=п так как Вер.=: · в
V
1 nidx
у i ч- ь‘1 ч- ь ч- · · · ч- W i
(1 Ч~ */з Ч- Vs ^5 Ч~ ·* · Ч" J/n ^7i) »
ТО
в V 1 + bl + ь2 +. + ь2
^ &Ср. 2 I 2 (1 + Vtb* + V*b| +. + Vn^«)
Обмоточный коэфф. fw для случаев, когда изменение магнитного индукционного потока происходит по закону синуса, вычисляется по формуле (фигура 30):
L=sin q -j-: q sin -f-
В случае более сложной кривой магнитной индукции, для определения общего обмоточного коэффициента необходимо вычислить заранее обмоточные коэффициенты как для основной волны, так и для высших гармоник, причем вычисление производится по ф-лам:
sin q -γ
ДЛЯ ОСНОВНОЙ ВОЛНЫ. /*=-(Г ;
«Sin--
33
Sin q —
для 3-й гармоники .fw3 —-;
q sin — ίβ
sm q ~
для 5-й гармоники. f„s =-γ ;
«·8ΐητ
для n-il гармоники.f„n =-χ ·
" q · sin γ
Зная после разложения кривой магнитной индукции коэффициенты Ь3,1>й. ., Ьп и,
введя обозначения=А3,=А3,.
"~Ап’ нах°Дят общий обмоточный коэффициент по формуле:
f. · - ь-,л1 - - ь»лп
I 1 4- -i- 4-. +
Па основании этих формул выражение для коэфф-та Каппа принимает следующий вид:
k = /В fix —
Ux
blAl + blAl + - + bn-n
i 1 + ь1 + »1 + ··· +ь»
В среднем, в выполненных синхронных машинах коэффициент Каппа к равняется:
Для однофазных машин..0,92
» двуфазных » ..1,01
» трехфазных » ..i ,065
и, соответственно этому, наводимую эдс Е можно считать равной:
Для однофазных машин. 3,68 w ·/!>· 10* вольт » двуфазных ». 4,04w /<!>· цт“ »
» трехфазных ». 4,26w · Ф · Ю8 »
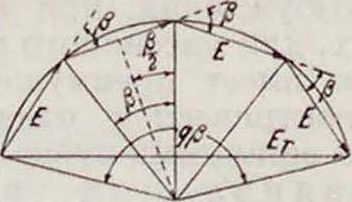
В трехфазных Г. п. т., при соединении обмотки якоря в звезду, третьи гармоники и все кратные трем не оказывают влияния па форму кривой сопряженного напряжения, вследствие чего если в фазовых напряжениях и имеются третьи и кратные трем гармоники, то в междуфазовых напряжениях
Фигура 31.
гармоники этого порядка делаются равными нулю. На основании этого сопряженное (ме-ждуфазовое) напряжение
Емф. — Уз УEj + Ει E“,
между тем, для фазового напряжения
Еф=УЕ* + EI + EI+. +К.
Т. о., в трехфазных Г. н. т., имеющих соединенные в звезду обмотки, Емф. < У 3 Еф. Если обмотка трехфазного Г. п. т. соединена в тр-к, то третьи и кратные трем гармоники в каждой цепи совпадают по фазе и складываются; поэтому, если концы двух соединенных обмоток разъединять и приложить к ним вольтметр, то он покажет эффективное значение эдс, равное 3 У El + El + E t -f..
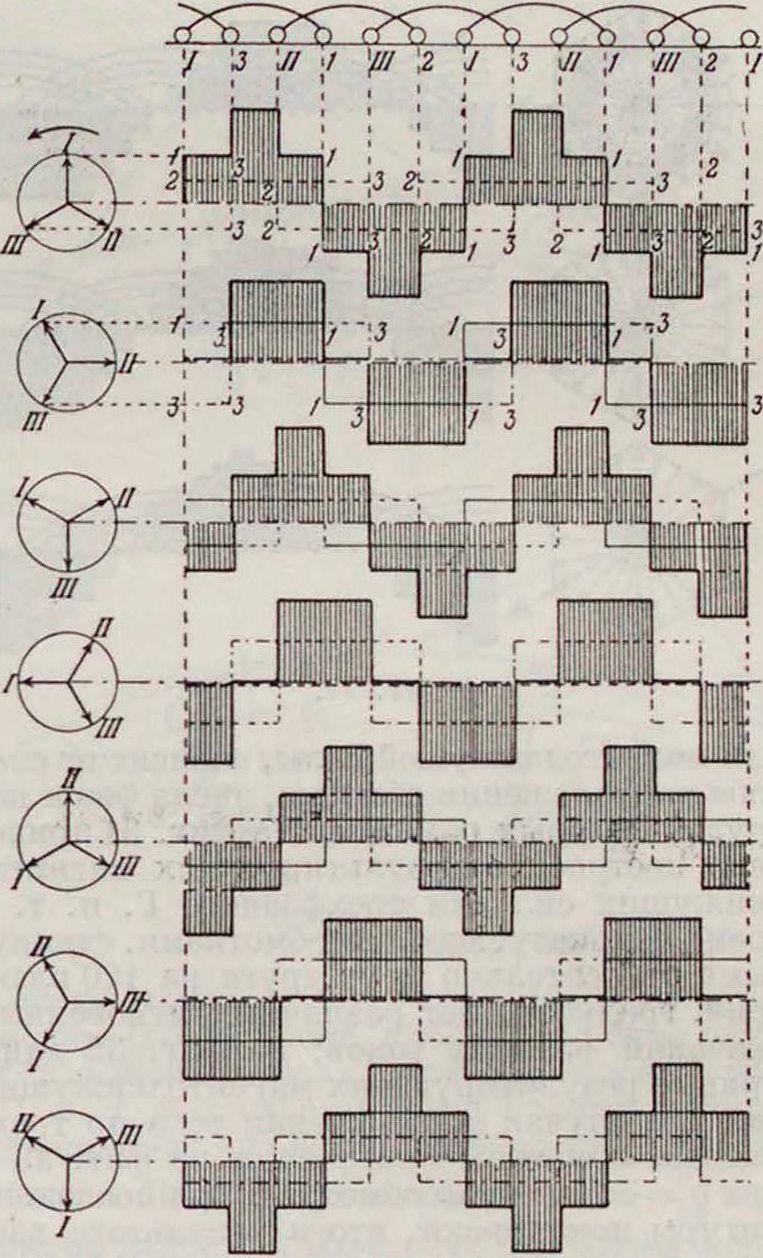
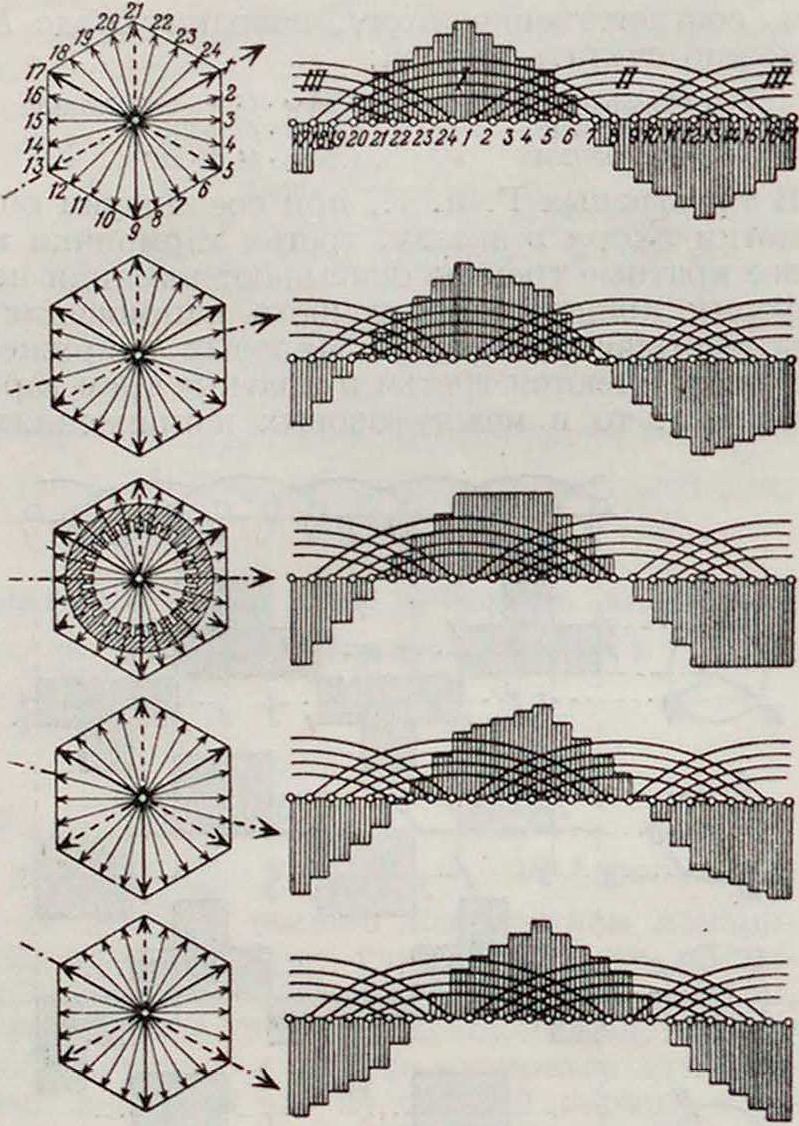
II. Магнитодвижущая сила якоря. При прохождении тока по обмотке якоря создается магнитное поле, причем форма кривой напряженности магнитного поля,
Фигура з;.
или магнитодвижущей силы, зависит от способа расположения обмотки, числа фаз и нагрузок фазовых обмоток. На фигуре 31 приведено построение результирующих магнитодвижущих сил для трехфазного Г. п. т. с тремя однокатушечными обмотками, сдвинутыми относительно друг друга на 120 элек-трич. градусов, для различных мгновенных значений фазовых токов; на фигуре 32 даны кривые результирующих магнитодвижущих сил для случая прохождения тока по трехфазным обмоткам при q=4 и на фигуре 33— при q=со (гладкая обмотка). Три последние фигуры показывают, что в результате взаимодействия трех пульсирующих фазных полей создается поле, периодически меняющее свою форму и передвигающееся синхронно с магнитной системой. Отношение максимальной и минимальной амплитуд равно 1 :0,866. С целью уменьшения пульсаций магнитодвижущей силы якоря, обмотки Г. п. т. выполняют с укороченным шагом.
Если на окружности якоря действуют три синусоидально распределенных поля, сдвинутых относительно друг друга на 120 элск-трическ. градусов и пульсирующих со сдвигом фаз к 120°, то’в результате получается постоянное синусоидально распределенное поле, вращающееся относительно тела якоря с угловой электрич. скоростью (о — 2тс·/, где f— частота тока. Если прямоугольное иоле, получающееся при прохождении тока по катушке, разложить на основную волну и ряд высших гармоник, то амплитуда магнитодвижущей силы основной волны, приходящейся на один полюс, составляет
Л1
V-
1-щ- =0,9 Г ил,
а результирующая магнитодвижущая сила для т фазных катушек, сдвинутых на электрических градусов, равна AWr=™ · 0,9 · и.
Если каждая фазовая обмотка располагается в 2pq пазах, то амплитуда основной волны магнитодвижущей силы, приходящейся на один полюс,
AW2=AW, q fWi
а амплитуда результирующей магнитодвижущей силы фазных обмоток, сдвинутых
360
относительно друг друга на электрических градусов,—
AWr-% -0,9 wx-q- fWi- 1.
Отсюда находят полные ампер-витки якоря : AWa=2р · ™ · 0,9 и>г q I f,Cl =
= 0.9/lfi · т w1 I.
Высшие гармоники магнитодвижущей силы якоря многофазных Г. п. т. проявляют
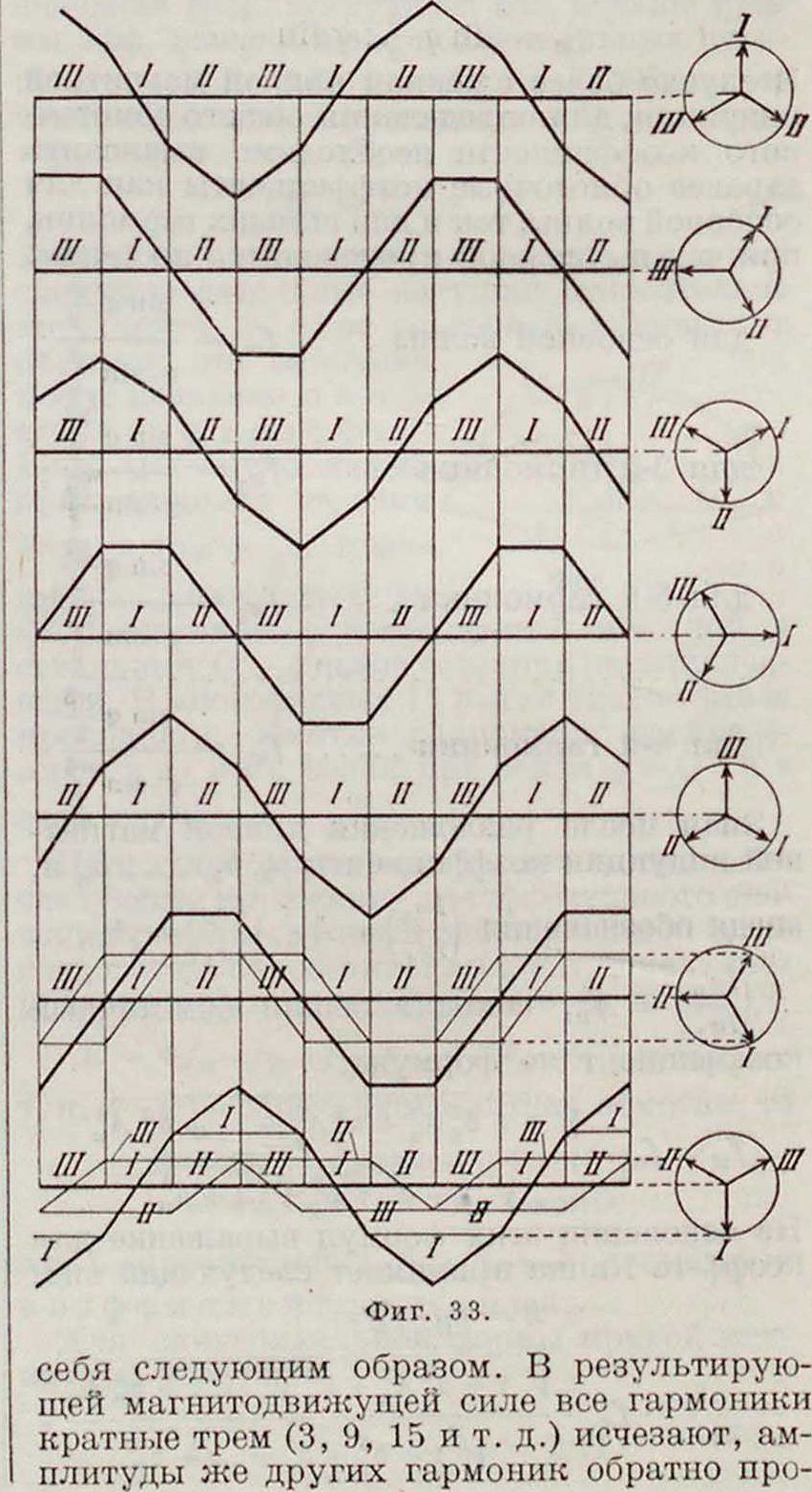
порциональны № гармоники; последние гармоники образуют также вращающиеся поля, причем эти поля гармоник, X» которых м. б. выражены числом За -f 1, имеют направление вращения одинаковое с направлением основного поля, а поля гармоник порядка За — 1 вращаются в противоположную сторону. Скорость вращения результирующего поля
/г-fi гармоники составляет ^ скорости вращения основного поля. В случае применения многокатушечных фазных обмоток поля высших гармоник очень малы. Здесь можно этими полями совершенно пренебречь и практически считать, что симметричный многофазный ток создает при прохождении по многокатушечным обмоткам практически синусоидально распределенное поле, вращающееся синхронно с основным полем магнитной системы.
Из фигура 33 легко усмотреть, что амплитуда результирующей магнитодвижущей силы совпадает с осью какой-либо фазовой обмотки в тот момент, когда в этой обмотке мгновенное значение силы тока достигает максимума. Отсюда следует, что если наводимое в обмотках напряжение и сила тока совпадают но фазе, то результирующее поле якоря занимает положение, перпендикулярное к основному полю магнитной системы.
В однофазных машинах ток, проходящий по обмотке якоря, создает пульсирующее поле. Однако, всякое пульсирующее поле можно представить себе как результат взаимодействия двух постоянных магнитных полей, вращающихся в взаимно противоположные стороны с угловой электрич. скоростью равной 2л · /, причем амплитуда этих полей равняется половине амплитуды пульсирующего однофазного поля. Так. обр., одно из этих полей вращается относительно магнитной системы синхронно, а другое, т. н. инверсное поле, с двойной угловой скоростью в противоположную сторону. Инверсное поле создает дополнительные потери в машине и наводит в обмотке возбуждения ток двойной частоты. Для уменьшения влияния инверсного поля однофазные I. п. т., как правило, снабжаются демпферной обмоткой.
Пользуясь ранее выведен, ф-лами, можно прийти к выводам, что для однофазн. Г. и. т.
AWa=0,45/Vj w I.
В случае несимметричной нагрузки многофазных Г. п. т. магнитодвижущая сила якоря создает пульсирующее вращающееся поле, к-рое можно разложить на два постоянных поля: 1) вращающееся синхронно с магнитной системой и 2) вращающееся относительно магнитной системы с двойной угловой скоростью. Обратновращающееся поле вызывает дополнительн. потери; для уменьшения их в многофазных Г. п. т., предназначенных для работы с неравномерной нагрузкой фаз, должно быть предусмотрено устройство демпферных обмоток.
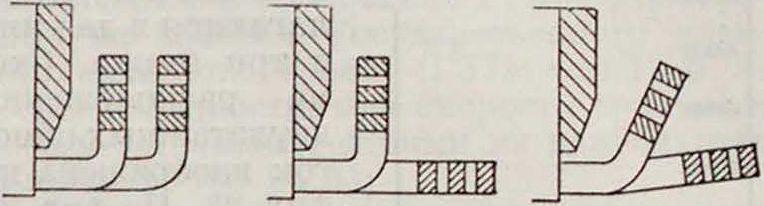
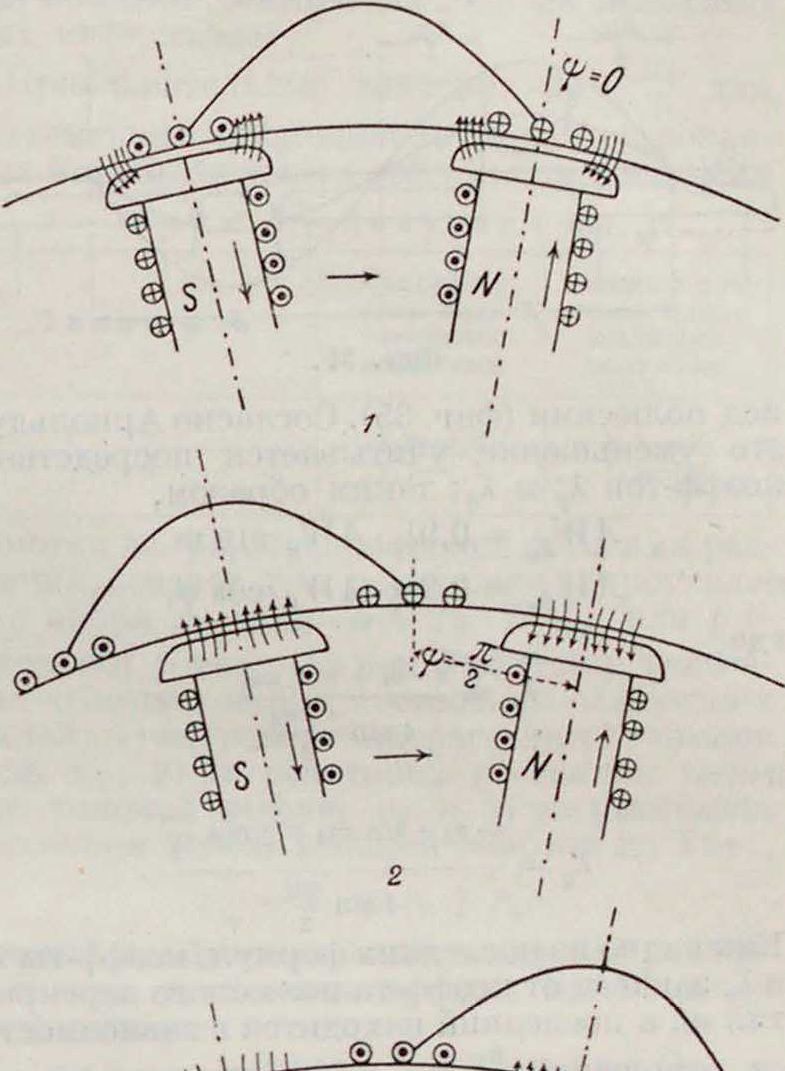
III. Реакция якоря. Магнитное поле, которое создается током, проходящим по обмотке якоря, взаимодействует с основным полем магнитной системы. Это явление, как известно, называется реакцией якоря. На фигуре 24 изображены положения ноля яко ря относительно основного поля для трех случаев: когда ψ=0, ψ=— “ и ψ=+ - ; при этом магнитная система Г. п. т. взята с явно выраженными полюсами. Из фигура 34 можно усмотреть, что при отсутствии сдвига фаз

Фигура 3·ί.
между током и эдс, наводимой основным полем (ψ=0), поле якоря действует поперек основного поля, ослабляя основное поле Г. п. т. под набегающими краями полюсов и усиливая его над сбегающими краями полюсов. При токе отстающем (гр= — j поле якоря действует навстречу основному полю, а при токе опережающем поле якоря направлено в ту же сторону, что и основное поле. Таким обр., в этих случаях поле якоря действует вдоль основного поля, причем в первом случае основное поле от реакции якоря ослабляется,а во втором случае усиливается.
Для промежуточных случаев, когда ψ < “,
поле якоря можно разложить на два составляющих поля: одно—поперечное, с амплитудой пропорциональной I · cos ψ, а другое— продольное, с амплитудой пропорциональной I sin гр. В машинах с неявно выраженными полюсами магнитное сопротивление для потоков, создаваемых поперечным и продольным полями якоря, почти одинаково, вследствие чего эти потоки пропорциональны соответствующим ампер-виткам якоря. В синхрон, машинах с явно выраженными полюсами, для определения реакции якоря необходимо учитывать уменьшение действия продольных ампер-витков AW я и поперечных ампер-витков AWQa, происходящее вследствие наличия воздушных промежутков между явно выраженными полюсами и неравномерности воздушного зазора
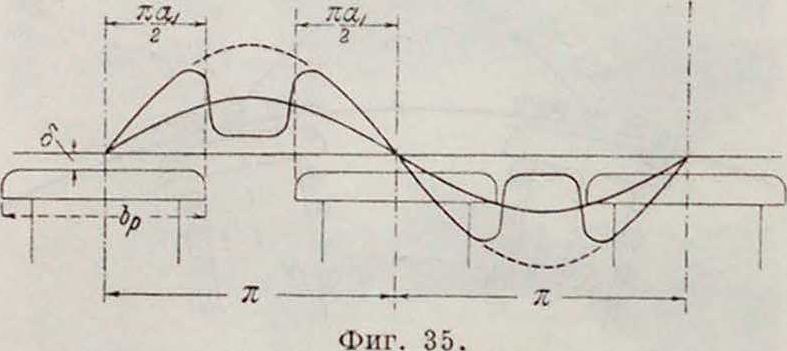
под полюсами (фигура 35). Согласно Арнольду, это уменьшение учитывается посредством коэффициентов 1д и ?.д; таким образом,
AWg=Qfd/.y-A M,· si η ψ и AW(Ju=0,9?.g-AJVa cos ψ,
где л _ Г. · af -f Sill πα*
О к · aj
4 Sin ——
2
И
т: · o-i - Sin -04 + 7,cos -*1 0 _ 2
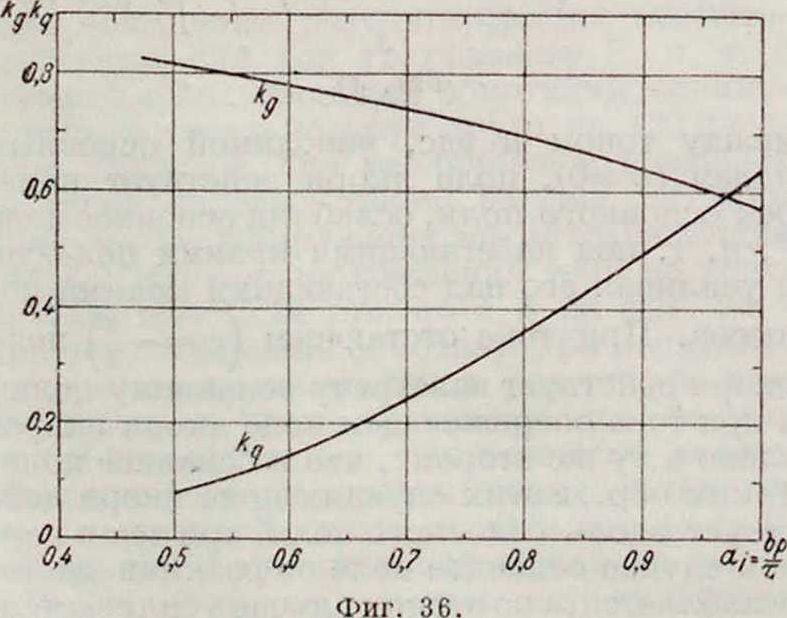
Как видно из последних формул, коэфф-ты и Я? зависят от коэфф-та полюсного перекрытия «,·, а последний находится в зависимости от отношений -р- и. Значения коэффициентов к у=О.9/.0 и=0,9/? приводятся на фигуре 36.
IV. Постоянные э л е к т р и ч е с к о и пели якоря. Электрич. цепь якоря состоит из т. н. активного сопротивления /i,r,
самоиндукции, обусловленной потоками рассеяния Ls и емкости С„. Емкость витков якоря по отношению друг к другу и относительно корпуса сравнительно мала; поэтому при исследовании рабочего процесса синхронных машин влиянием емкости обмотки якоря пренебрегают.
Под активным сопротивлением обмотки якоря альтернаторов подразумевают то сопротивление, которое вызывает джоулевы потери при прохождении переменного тока. Джоулевы потери в обмотке якоря при прохождении переменного тока больше потерь в тех же проводниках при постоянном токе. При прохождении переменного тока по обмотке плотность тока, вследствие образования токов Фуко, распределяется неравномерно по площади поперечного сечения проводника; от этого потери на нагревание в обмотке увеличиваются. В этом случае джоулевы потери Pj — I--J{а, где Ла—т. н. акт. сопротивление, которое для диамагнитных материалов, при постоян. t° провода и не-изменяющейся частоте тока, почти не зависит от эфф. значения силы тока 1. Активн. сопротивление Ra больше омич, сопротивления R. Увеличение сопротивления проводника при прохождении по нему переменного тока выражается коэффициентом ка, представляющим собою отношение активного сопротивления к омическому:
Если магнитные поля, образующиеся при прохождении переменного тока по обмотке, наводят в соседних металлич. частях вихревые токи, то количество развиваемого этими токами тепла, при постоянной частоте и одной и той же форме кривой тока, также пропорционально квадрату эфф. силы тока I, протекающего по обмотке. Т. о., все джоулевы потери, имеющие место при прохождении переменного тока но проводнику, могут быть определены как Pj=Р Р,г; при этом 11 < Нп < Uw. Для уменьшения дополнительных потерь в соседних металлич. частях обмоток головки обычно удаляют на возможно большие расстояния от металлич. частей. На увеличение эфф. Rw оказывают влияние колебания коэфф.самоиндукции якорной обмотки, если машина имеет явно выраженные полюса, токи высших гармоник и токи, наводимые инверсными полями (наир., при несимметричной нагрузке или несимметричных многофазных системах, токи двойной частоты в однофазных машинах). Определение И„ для якорных обмоток производится на основании вычислений потерь на токи Фуко в этих обмотках.
Потери на токи Фуко в проводниках зависят, при постоянном значении /, главн. обр. от частоты, устройства обмотки и размеров проводников. Потери на токи Фуко проводников, заложенных в пазы, зависят от высоты проводника (размера по радиусу якоря). Для каждой обмотки, по которой протекает переменный ток и которая заложена в пазы, существует определенная высота проводника, т. и. критическая, при которой увеличение акт. сопротивления получается наименьшее. Если в пазе размещены друг под другом несколько проводников, то проводники, ближайшие к прорезу паза, лежат в более сильном поле, чем проводники, находящиеся внизу паза, и вследствие этого потери в них больше. Па потери от вихревых токов оказывает влияние отношение ширины проводника к ширине паза. Если проводник разбит на полоски, параллельные основанию паза, причем эти полоски спаяны своими выступающими из паза концами, то потери на токи Фуко зависят от отношения длины части проводника, утопленной в пазу, к длине части его между местами спайки полосок.
Н частях проводников, лежащих вне лазов, распределение плотности переменного тока нормальной частоты, в 50 пер/ск., происходит в большинстве случаев б. или м. равномерно. Только в машинах большой мощности, имеющих большие головки обмоток и большие сечения проводов, увеличение сопротивления в лобовых частях может достигать весьма значительных размеров. Для токов нормальной частоты средний коэфф. увеличения сопротивления последовательно соединенных проводников, заложенных в пазы и имеющих прямоугольное сечение, м. б. вычислен но ф-ле
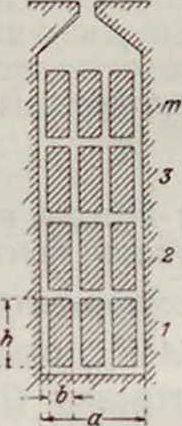
lcN — 1 Η-----g— ь. здесь т—число рядов проводов, лежащих друг под другом (фигура 37), а £—отвлеченное число, так называемая приведенная высота провода, равная а-к, где
α= 2*1/5·^··-Vi
У а р 10‘
(в последнем выражении п—число проводов в каждом горизонтальном ряду, Ь—глубина провода в см, а—ширина паза, f—частота с.к"
©°go§%·
°%®сРо°
•-®®ogogp
.Чо.оо“
Фигура 37.
Фигура 38.
переменного тока, р—удельное сопротивление в миллиметров“/м). Для проводников с круг-л ы м сечением
- 1 + 15.25 * * ’
при этом для вычисления f принимается k=b—d. Коэфф-ты увеличения сопротивления последовательно соединенных проводников в части, находящейся вне пазов, определяются по формулам: для проводников с прям о у голь н ы м сечением
Ь =14- ~
“9 1 1 9а
0,8
для проводников (смотрите фигура 38)
36 э ’
круг л ы м сечением при больших значениях числа проводников п
Для медных проводников и для 50-периодно-го переменного тока ь _ i, *J J>‘ л. _L,
/f* - 1 132 d’ η
d*
где *=я · βΓ
На основании вышеприведенных ф-л средний коэфф. увеличения сопротивления к для всей обмотки определяется так:
kд7 · 1 + kg · lg hp; + hg · λ
k„ =
l + 1»
1 + )
где ί—длина якоря, ls—средняя длина головки витков и λ=г* · С целью уменьшения к,с в современных машинах часть обмотки, заложенной в пазах, выполняют слоями (фигура 22), а капоты и крепления головок обмотки статора делают из немагнитных материалов.
η
Приблизительные значения к„= " для современных рационально сконструированных машин указаны в табл.2. Самоиндукция
Таблица 2. — Значении kw.
| Машины с | Машины с не- | |
| Число фаз | явно вира- | явно выра- |
| женными | женными | |
| полюсами | полюсами | |
| 1 | 1,2—1,6 | 1,2—1,6 |
| 3 | 1,1—1,5 | 1,1—1,4 |
обмотки якоря, обусловленная потоками рассеяния, создает т. и. реактивное сопротивление якоря xs=L, · ш=2.т · · L„ или р е-актанц рассеяния. Реактанц рассеяния обмотки якоря состоит из следующих частей: 1) из реактанца рассеяния потоков паза ждг, 2) из реактанца рассеяния потоков головок зубцов хк и 3) из реактанца рассеяния лобовых частей обмоток х8. Т. о.,
= % + *к + ire-
Реактанц, обусловленный потоками рассеяния паза и головок зубцов, вычисляется по формуле:
где f—частота тока в пер/ск., гс—число витков в фазовой обмотке, I,—т. и. идеальная длина якоря, р—число пар полюсов, q—число активных пазов, приходящихся на полюс и фазу, —проводимость для потоков паза п /.к—проводимость потоков головок зубцов. Проводимости Яд- и /.к вычисляются по приведенным ниже формулам.
Проводимость паза:
а) для однослойной обмотки
^=0,9^ +
ь. о-ι 4- а“
ht. α4 *
б) для двуслойной обмотки
= 0,9
Проводимость потоков зубцов:
а) для машин с неявно выраженными полюсами
).к =
и
~т
D.75 (а.,„ + а.„)
61:„, i
б) для машин с явно выраженными полюсами
21- - о, 4ί- - а,
).к=0,32In—2 + 0,64 In2t;a _ gg ·
a,a l:a a
Здесь a, —ширина прореза головки паза магнитной системы, δ—воздушный зазор, t; —зубцовый шаг якорной системы, ί, — зубцовый шаг магнитной системы.
Если в якоре применяются закрытые пазы, то эдс, которая наводится в обмотке якоря потоками рассеяния, замыкающимися через перемычку, м. б. учтена в предположении,
11
Г. Э. 771. V.
что перемычка в магнитном отношении насыщена до 22 500 максвелл/см2. В этом случае Е. =4,44 f- w dk · (,- · 2 · 22 500 · 10~8 =
= JW · 1Ί dk ВОЛЬТ,
где dk—толщина перемычки.
Реактанц, обусловленный потоками рассеяния головок обмоток, вычисляется по следующей формуле:
| ( 1 | ( w Υ |
| © | νιού) |
где ls—длина головки обмоткн [обычно 1S —=(2,2 -Р 2,8) г] и /.s—проводимость потоков рассеяния лобовых частей обмотки; приблизительное значение λ5 может быть при-
пято равным 0,8 —, где s =.
Векторные диаграммы синхронных генераторов переменного тока. В нагруженном синхронном Г. п. т. напряжение на зажимах машины при постоянных значениях скорости вращения и силы тока возбуждения отличается от того, какое имела машина при холостом ходе, потрем причинам: а) вследствие падения напряжения, вызываемого наличием эффективного и индуктивного сопротивлений обмоток якоря; б) вследствие реакции якоря или влияния поля якоря на основное поле машины, создаваемое обмоткой возбуждения; в) вследствие изменения коэффициента рассеяния магнитного потока обмотки возбуждения с изменением значения и характера нагрузки генератора.
Влияние всех этих факторов на напряжение Г. п. т. лучше всего уясняется при помощи векторных диаграмм. Ниже приведены построения векторных диаграмм только для многофазных синхронных машин, имеющих симметричную обмотку якоря и равномерную нагрузку каждой фазной обмотки якоря, причем построение диаграмм выполнено для цепи одной фазы. Если яге в некоторых случаях встречается необходимость в построении векторных диаграмм не для фазовых напряжений, а для напряжения плеча сети, то есть для сопряженного или междуфазового напряжения(что представляет практический интерес, когда машина имеет обмотку, соединенную в звезду), то при построении диаграмм напряжений непосредственно для плеча сети нужно лишь умно-жить полное сопротивление обмотки якоря z на У3 и пользоваться характеристикой холостого хода, снятой тоже для напряжения сети, а не для фазы.
Что касается векторных диаграмм напряжений для однофазных альтернаторов, то построение таких диаграмм производится так же, как и для многофазных синхронных машин; здесь необходимо только надлежащим образом учитывать реакцию якоря, а именно—при определении изменений напряжения следует принимать во внимание ампер-витки только синхронно вращающегося ноля якоря. В этом случае амплитуда этих ампер-витков
А ΗΓβί=0,45/^ w · I.
I. Диаграмма Блондель — Арнольд— Ла-Кура (Б.-А.-К.) для синхронных Г. п. т. Эта диаграмма применяется в тех случаях, когда синхронные машины имеют магнитную систему с явно выраженными полюсами"
Пусть отрезок OI представляет вектор силы тока фазной цепи якоря (фигура 39). Внешняя цепь машины состоит из эффективного и индукт. сопротивлений, и вектор силы тока отстает от вектора напряжения на зажимах машины на /_ ψ. Из точки U проводят вектор эдс ОЕ„, наводимой при холостом ходе машины, под углом ψ к вектору ΟΙ,при чем этот угол откладывают в направлении вращения векторов.
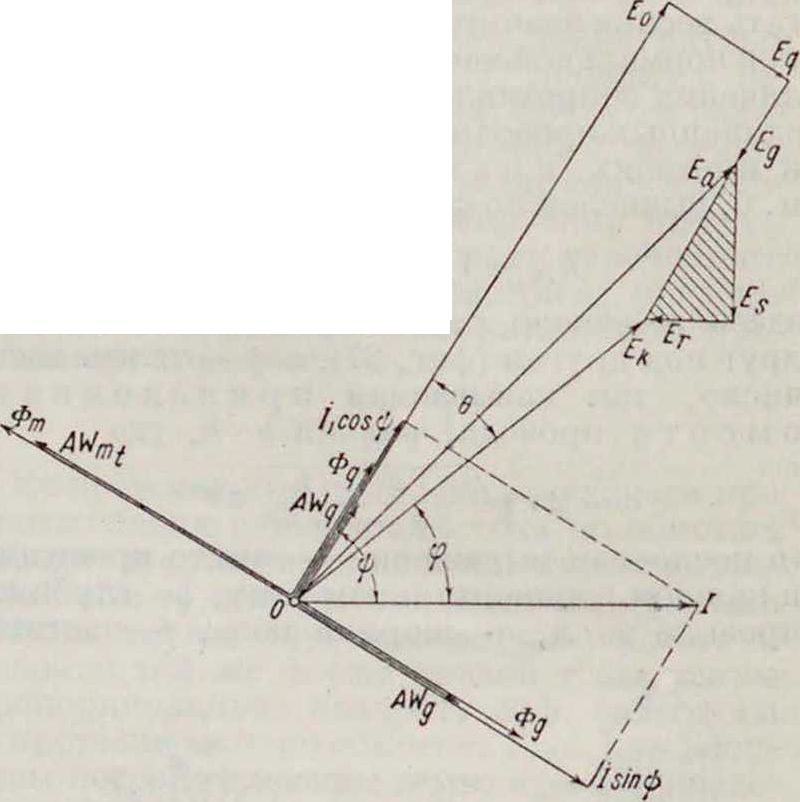
Фигура 39.
Вектор основного потока, или потока возбуждения 0<1>т доля-сен опереисать вектор
ОЕ0 на угол “, поэтому вектор ампер-витков основного поля возбуждения AWm откладывают перпендикулярно к отрезку ОЕ0. Для нахождения вектора эдс якоря ОЕа, наводимой результирующим магнитным потоком якоря, необходимо учесть влияние реакции якоря. В этом случае поле якоря следует разложить на две составляющие: поперечное поле, сдвинутое в пространстве под углом в “ относитель по основного поля,
и продольное поле, совпадающее с направлением основного поля, причем первое поле пропорционально 1 cos ψ, а второе 1 · sin ψ. Поперечно действующее поле ослабляет основное поле машины-генератора под набегающими краями полюсов и усиливает под сбегающими, вследствие чего результирующее поле сдвигается в сторону, обратную вращению машины. Продол ь-ное поле, создаваемое составляющей тока,
отстающей от эдс на угол “, действует навстречу основному полю, почему происходит размагничивание машины; при опережающей на + * составляющей происходит усиление основного поля.
Т. к. в машинах с явно выраженными полюсами магнитное сопротивление для потока якоря неодинаково по окружности якоря, то это обстоятельство должно быть принято во внимание. Амплитуды ампер-витков поперечного и продольного полей якоря A Vqи А 1могут быть вычислены по формулам: A Vq — ).q · 0,9т w f„ · I cos ψ —
— kq m it; fKi I cos ψ — Xq · AWa cos ψ,
A Wg=).д · 0,9т tv fw I sin φ =
= kg in tv f№i I sin ψ — ?.g AWa- sin ψ,
где m—число фаз, tv—число витков в фазовой обмотке якоря, fw—амплитудный обмоточный коэфф-т, λ. и ).д—коэфф-ты, учитывающие уменьшение действия поперечных и продольных ампер-витков якоря, происходящее из-за наличия воздушных промежутков между явно выраженными полюсами машины, AWa—полные ампер-витки якоря; значения коэффициентов кд и kq приведены ранее на диаграмме (фигура 36). Вычислив значения ампер-витков AW„ и A Vg, откладывают векторы их соответственно по направлениям векторов /-cosij’ и I-sin φ.
Поперечные и продольные ампер-витки якоря A И’ и AWg создают магнитные поля Φν и Фд, которые, в свою очередь, наводят в оомотке якоря эдс Eq и Ед, отстающие по фазе от соответствующих магнитных пото ков на угол “. Векторы магнитных потоков
Ф9 и Фд, вследствие явления гистерезиса, несколько отстают от векторов ампер-витков AWg и А И у. Эти углы отставания очень малы, и практически при построении векторных диаграмм векторы Фд и Фд направляют соответственно по векторам A Wq и A Wg.
Из векторной диаграммы видно, что
/COS <р~ ь * ’
между тем, вследствие неодинакового магнитного сопротивления для потоков Фд и Фд
(/.g =с ).д), отношение j’? может быть больше
9 ф „ ^
или меньше tgtr, то есть
В таком же соотношении должны находиться и эдс:
Eg=4fB ’ /«л f w фд ’ 10-8 вольт,
ЕЯ=4fВ /«·, · Ϊ -W Фд Ю-8 ВОЛЬТ, аимеино: у1 -g tg№. Вследствие этого вектор,
равный сумме векторов Ед+Ед, не образует прямого угла с вектором силы тока I. Т. о., результирующая эдс якоря Еа представляется геометр, суммой трех эдс: Е0, Ед и Ед,то есть
Е„ == Eg -f Eq ф Eg.
Для нахождения напряжения на зажимах машины Ек необходимо учесть падения напряжения от активного сопротивления обмотки якоря Ег=1 -Я,с и от индуктивного сопротивления обмотки якоря или от влияния потоков рассеяния
E, — I- х, Ф,.
Вектор Ег должен иметь направление, обратное вектору I, а вектор Ев должен отставать от вектора 1 па угол ζ.
Из векторной диаграммы, данной фигура 39, следует, что
/·.„ -i- Eq + E, + E, + hr. Совершенно таким же образом можно построить диаграмму напряжения Г. п. т. для емкостной нагрузки, когда сила тока 1 опережает эдс Ед. В этом случае вектор напряжения Ек может получиться бблыним, чем вектор Ε0 (фигура 40).
Для построения векторной диаграммы Б.-А.-К. необходимо иметь данные относи тельно обмотки машины и ее сопротивлений га и х, и уметь находить эдс Ед и Ед. Поперечный поток Фд, индуктирующий эдс Ед, замыкается главн. обр. через воздух; поэтому можно принять, что Фд, а следовательно, и .Ед, пропорциональны ампер-виткам A Wq, то есть
Eg AWg. На основании этого для нахождения ПО AWg значения эдс Eqможно воспользоваться характеристикой холостогохода машины, а именно ее прямолинейной частью, которая определяется глав, обр. числом ампер-витков, потребных для проведения основного магнитного потока через ме-ждужелезное пространство (фигура41).
При определении Е„ необходимо учитывать насыщение машины и находить Ε4 как разность двух эдс, а именно: эдс, соответствующей ампер-виткам возбуждения А И„,(, и эдс, соответствующей разности AW,„—AWg (для индукционной нагрузки) или сумме А + +Alig (для емкостей нагрузки). Нахождение эдс Ед и Ед для Г. п. т. осложняется еще
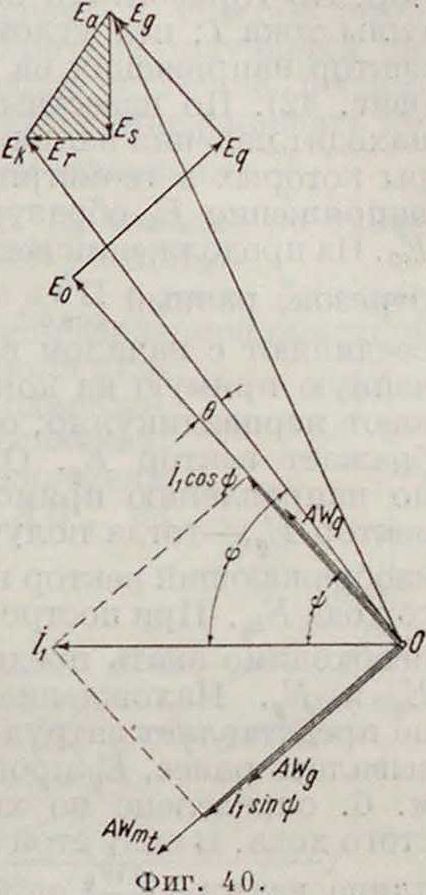
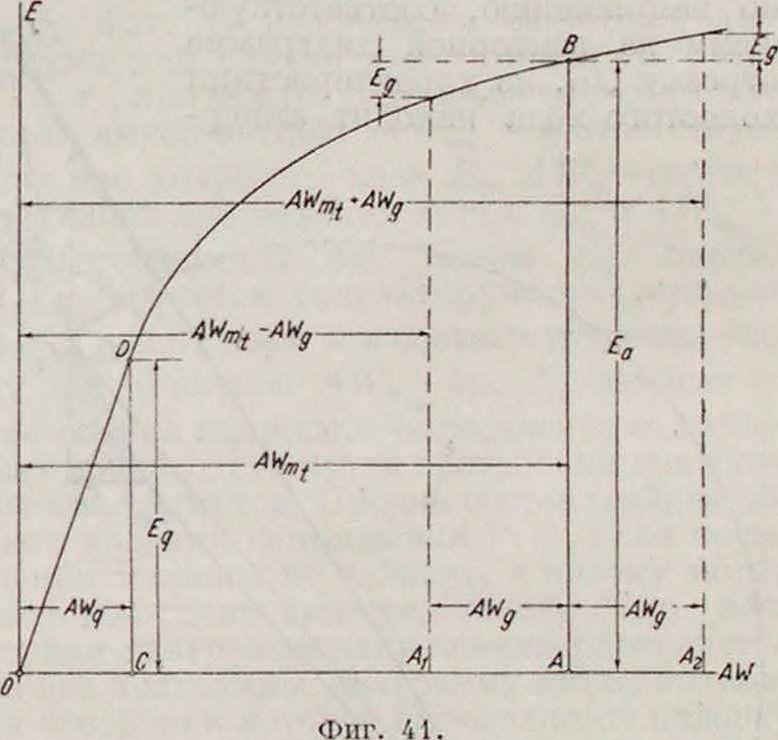
и тем обстоятельством, что для определения AWg и AWg необходимо знать угол ψ, равный φ + θ. Угол φ между векторами напряжения на зажимах машины и вектором силы тока обычно известен; он определяется характером нагрузки и задается указанием коэффициента мощности. Угол 0, а следовательно, и угол ψ могут быть найдены лишь из векторной диаграммы напряжения, а потому для построения последней приходится применять искусственные методы.
1) Для определения нов ы ш е-п и я напряжения диаграмма Б.-А.-К. может быть построена по характеристике холостого хода и параметрам машины след, обр. По горизонтали откладывается вектор силы тока I; под углом у к нему проводят вектор напряжения на зажимах машины Ек(фигура -12). По известным значениям г„ и xsнаходят падения напряжений Ег и Е„ векторы которых в геометрия, сумме с вектором напряжения Ек образуют вектор эдс якоря Еа- На продолжении вектора Е, откладывают отрезок, равный, и конец последнего соединяют с началом векторов О. На полученную прямую из конца вектора Е„ опускают перпендикуляр, отрезок которого изображает вектор Eg. От конца вектора Eqпо направлению прямой ОЕ0 откладывают вектор Ед,—тогда получается отрезок ОЕк, изображающий вектор напряжения холостого хода Еко. При построении этой диаграммы необходимо знать предварительно значения Ед и Ед. Нахождение длины вектора Eqне представляет затруднений, ибо, как указывалось ранее, Ед пропорционально А1Г8 и м. б. определено по характеристике холостого хода. В си.чу этой пропорциональности длина вектора ~ ? определяется по кривой характеристики холостого хода абсциссой, равной. 5, причем для нахождения - ‘
не требуется знания угла ψ, потому что
S=V т w 1=V А W«=Const.
Что касается падения напряжения Ед, то его определение также производится по характеристике холостого хода. С этой целью
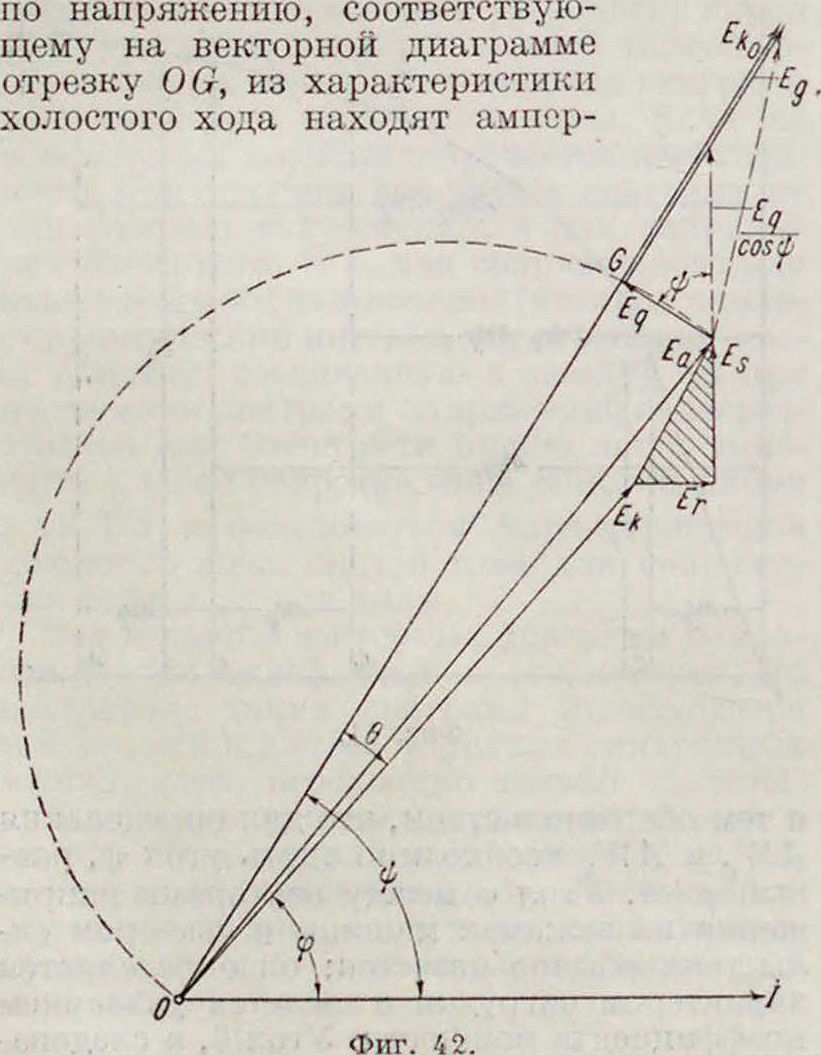
витки AW„, равные разности ампер-витков возбуждения АП и ампер-витков А1Гр:
АП μ=AW„,t — A Vg.
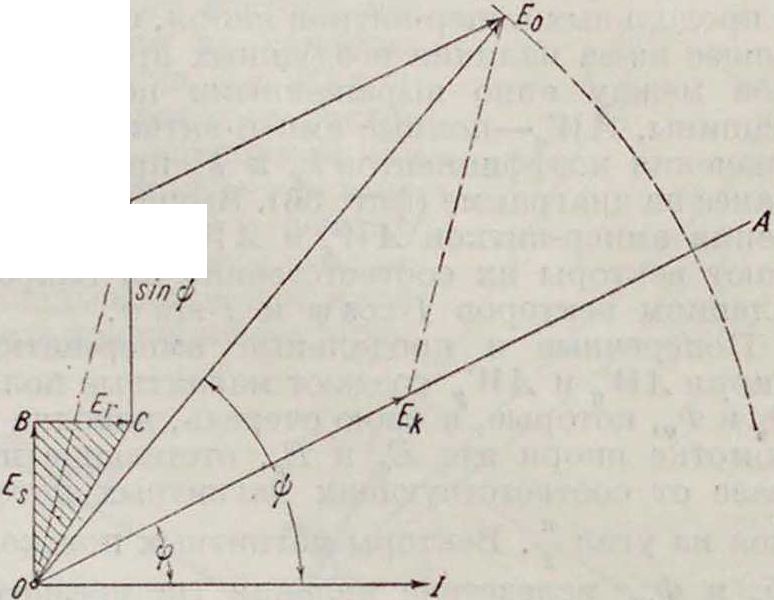
Поэтому для нахождения падения напряжения Ед нужно к абсциссе A Vm приложить отрезок, соответствующий ампер-виткам А1Г?; тогда по получен, абсциссе определяются эдс Е„ и падение напряжения Ед.
N
Фигура 43.
-±-
Так как угол ψ определяется из построения векторной диаграммы, то число ампер-витков AWg в этом случае м. б. вычислено по приведенной ранее ф-ле:
A Wg=}.д- A Wa - sini;).
2) Для определения падения и а и р я лс е и и я построение векторной диаграммы Б.-А.-К. возможно лишь приблизительное; при этом диаграмму на основании заданных значений Е0=Еко, I и cos y строят следующим образом. Из точки О (фигура 43) проводят вектор силы тока 1; под углом у к нему из той же точки проводят прямую О А; затем строят векторы Е,=1-х, иЕг—1 га; из конца вектора Ег точки С восстанавливают перпендикуляр к вектору силы тока I
или к вектору Е,. и на этом перпендикуляре откладывают отрезок CD, равный После этого из точки О, как из центра, описывают окружность радиусом ОЕ0, соответствующим заданному напряжению холостого хода Ек‘, из точки В проводят прямую ВЕ0, параллельную лучу ОА, до пересечения с описанной окружностью; тогда отрезок ВЕа представит собою искомое напряжение на зажимах машины Ек для нагрузки I и коэфф-та мощности cos у. Для построения этой диаграммы должно быть известно Если машина достаточно насыщена и точка, соответствующая номинальному напряжению, лежит за коленом кривой характеристики холостого хода, то в известных пределах можно с достаточной точностью считать, что эдс Ед пропорциональна числу ампер-витков А Уд, а следовательно, и
AU
-2. :
sin ψ
: ).g A Wa — Const,
то при определении угол ψ может 6ι
неизвестен.
Описанные выше построения векторных диаграмм Б.-А.-К. выполнены в нредполо-
жении, что коэфф-т магнитного рассеяния машины остается постоянным при изменении нагрузок. В действительности лее коэфф. магнитного рассеяния изменяется с нагрузкой, хотя это изменение невелико (в самых неблагоприятных случаях не превосходит
7—8%). Если же принять во внимание, что коэфф-т магнитного рассеяния оказывает влияние только на ампер-витки, потребные для проведения полезного потока машины через ярмо магнитной системы и полюсные сердечники, то вполне можно пренебречь изменением коэфф-та рассеяния для машин, не особенно сильно насыщенных.
Когда машина сильно насыщена, то учет изменения коэфф-та рассеяния при построении векторной диаграммы напряжения производится следующим образом. На основании описанных выше способов построения,
Еп по данным, значениям Ек, ЕГ1 Е8 и на ходят (фигура 42) вектор OG=Ek+Er+Es + Еди угол ψ, а по значению последнего и А д— Хд · AWa sin ψ·
Если, как это делалось выше, из характеристики холостого хода определить по значению вектора 01) число соответствующих ампер-витков ОА1 (фигура 44), то влияние изменения коэфф-та рассеяния на найденное значение ампер-витков О А, остается неучтенным. Если же, с другой стороны, на кривой характеристики холостого хода отложить ординату, равную 01) 4 (аь и а0—коэфф-ты
’о рассеяния при нагрузке и холостом ходе), то соответственно этой эдс приходится изменять число всех ампер-витков, тогда как изменение коэфф-та рассеяния должно оказывать влияние лишь на ампер-витки ярма и сердечников полюсов. Поэтому, для более точного учета влияния изменения коэффициента рассеяния, рекомендуется поступать так: из точки 11{ кривой характеристики холостого хода провести линию, параллельную
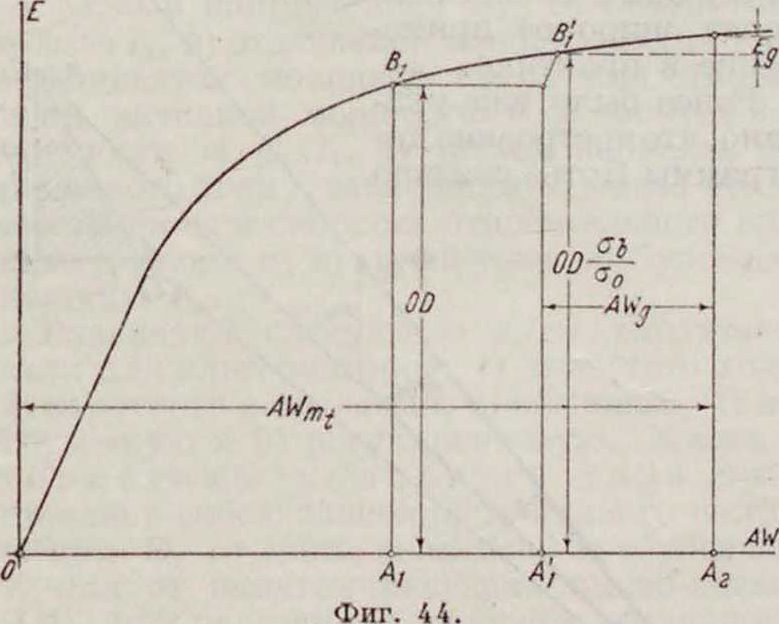
прямолинейной части начала кривой характеристики; точка пересечения этой прямой с прямой, проведенной параллельно оси абсцисс через конец ординаты, равной OD, и даст искомое число ампер-витков, необходимых для наведения эдс OU при измененном коэффициенте рассеяния. Таким образом, отрезок AjAi изображает в данном случае увеличение числа ампер-витков, вызванное увеличением коэфф. рассеяния. Так как прямолинейная часть начала кривой характеристики холостого хода не вполне точно представляет магнитную характеристику между-железного пространства и тела якоря, то при описанном графическом способе определения числа ампер-витков получается несколько преувеличенное значение последних. Эту ошибку можно компенсировать не
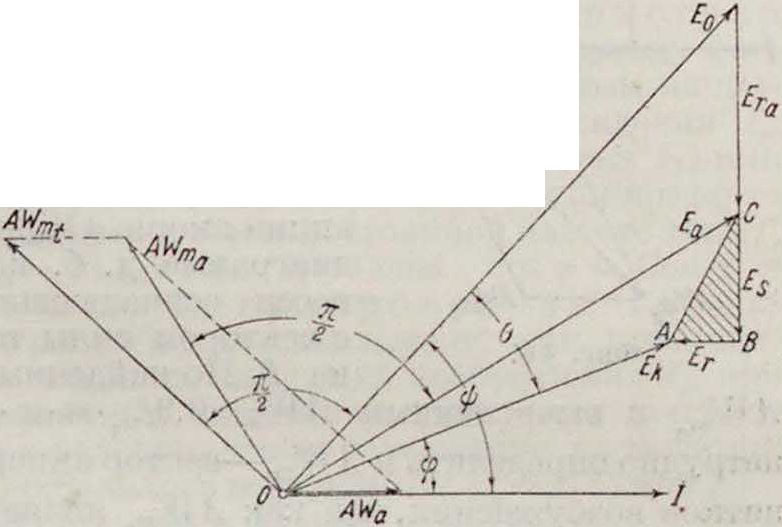
которым уменьшением отношения 7,1.
Эдс холостого хода Е0 находят по сумме ампер-витков ОАх + А д=А[Аг.
II. Диаграмма Потье. Для синхронного Г. п. т. с распределенной обмоткой возбуждения, когда поля якоря машины имеют одинаковое магнитное сопротивление, необходимость в разложении ампер-витков якоря A Wa на
Фигура 45.
AWq и А д отпадает. В этом случае вектор эдс реакции якоря ЕГп, представляющий геометрическую сумму векторов Ед+Ёд, располагается перпендикулярно к вектору силы тока, так как при Хд=Хд получается
На фигуре 45 изображена векторная диаграмма для случая индуктивной нагрузки Г. п. т., причем на диаграмме нанесены векторы ампер-витков: А УЩ—соответствующих эдс холостого хода Е0, AWa—соответствующих эдс реакции якоря А’г„ и A Wm — соответствующих эдс якоря Еа. Вектор Λ I Г,„ является результирующим векторов А !Г,„( и .41 Г„, причем соответствующая числу ампер-витков AWm эдс Е„ зависит от насыщения машины,—определение ее надлежит производить путем построения диаграммы ампер-витков. Прочие составляющие общего падения напряжения Г. п. т. от насыщения машины не зависят, а потому могут быть построены непосредственно. Т. о., векторная диаграмма напряжения распадается на две диаграммы: диаграмму ампер-витков, на основании которой определяется падение напряжения, вызываемое реакцией якоря, и диаграмму эдс, учитывающую падение напряжения от сопротивления (эффективного и индуктивного) обмотки якоря. На фигуре 40 указано построение векторной диаграммы Потье для случая емкостной нагрузки синхронного Г. п. т. Построение диаграммы Потье м. б. осуществлено по характеристике холостого хода и параметрам машины.
1) Для определения повыше-н и я н а п р я ж е н и я диаграмма строится следующим образом. По заданным Ек, 1,
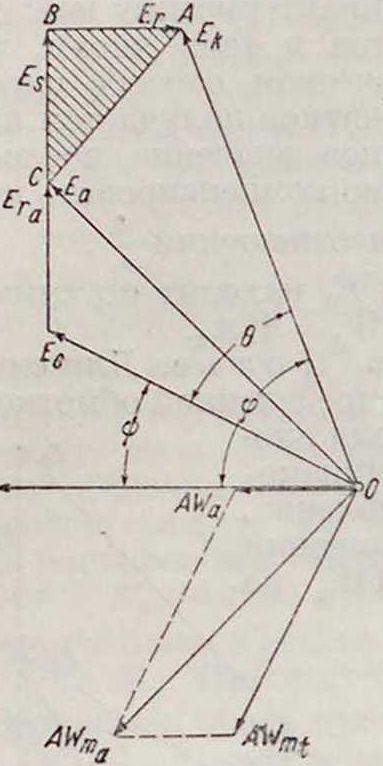
cos φ и сопротивлениям г„ и ха, путем сложения векторов находится вектор результирующей эдс якоря Е„ (фигура 46). Из характеристики холостого хода, по получен, результирующей эдс Е„ находят AWwj вектор этих ампер-витков, в предположении отсутствия влияния гистерезиса, должен опережать вектор Еп
на угол [], поэтому он на диаграмме откладывается перпендикулярно к отрезку ОС в положительном направлении вращения векторов. Вектор ампер-витков реакции якоря AW„ на диаграмме должен быть нанесен совпадающим с вектором силы тока Г. По найденным AWm и вычисленным AWa=0,9fWl-m-w I нетрудно определить и А ТГ„1(—вектор ампер-витков возбуждения, так как AW„,t является геометрич. разностью между A Wma и А11 „ (фигура 45). После нахождения А УЩ напря жение холостого хода машины определяется по характеристике холостого хода (фигура 47).
2) Для определения падения напряжения диаграмма Потье, так же как и диаграмма Б.-А.-К., не может быть точно построена за отсутствием данных относительно угла п>. Диаграмму в этом случае строят так. Под углом φ к вектору силы тока проводят луч прямой OQ, даю щий направление
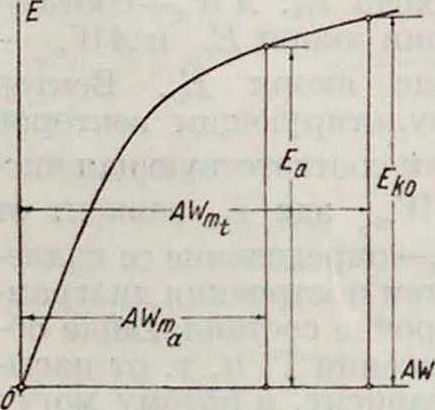
вектора Ек (фигура 48), а под углом у=1,05 ψ (для индуктивной нагрузки) —линию ОС, иредставляю-щую направление вектора эдс Еа; это соотношение между У и φ в большинстве случаев бывает весьма близким к действительности.
Под углом + “ к
Фигура 47. линии ОС проводят прямую, дающую направление вектора Л Wm, а на обрат, продолжении вектора 1 откладывают вектор А11 и проводит прямую KN, параллельн. направлению Л W,„ ,Т. к. Е„ известна, то по характеристике холостого хода молено найти Л 1Г,П<; приняв AW,4 за радиус, а точку О за центр, описывают дугу до пересечения ее с прямой KN. Т. о. находят направление и величину вектора Л1Г,„;, а по последним—из характеристики холостого хода—и Еа — ОС. После определения вектора Е„ строят тр-к падения напряжения СНА, в котором, если угол у был принят правильным, вершина А должна
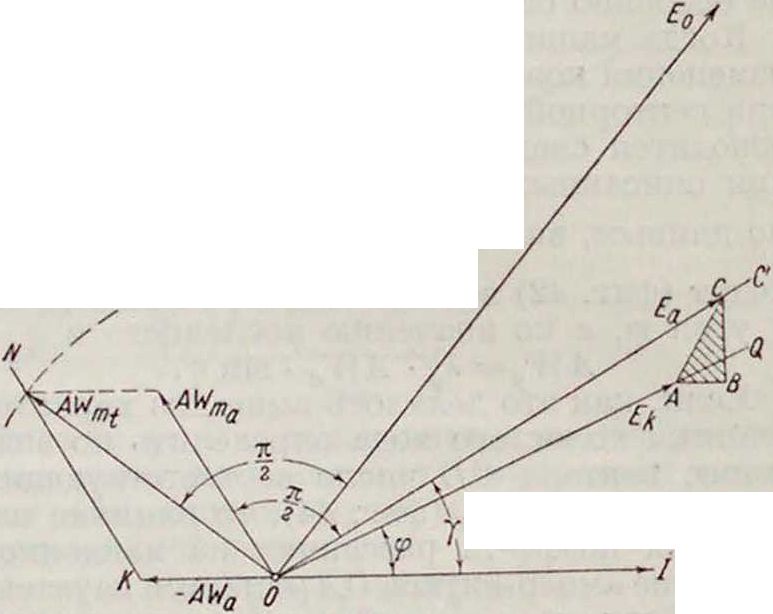
1.05Р
Фигура 48.
попасть на прямую OQ (направление вектора Ек). Если этого совпадения вершины тр-ка не произойдет, то необходимо построение повторить, изменив соответствующим образом угол у. Если при построении векторной диаграммы Потье приходится вводить поправку на изменение коэффициента магнитного рассеяния при нагрузке, то эта поправка м. б. сделана аналогичным образом, как и при построении диаграммы Б.-А.-К. Для машин, не сильно насыщенных, введение поправки на изменение коэфф-та рассеяния никакого практического значения не имеет, поэтому обычно ее не делают. Диаграмма Потье представляет по существу диаграмму Б.-А.-К., примененную к машине с распределенной обмоткой возбуждения; потому
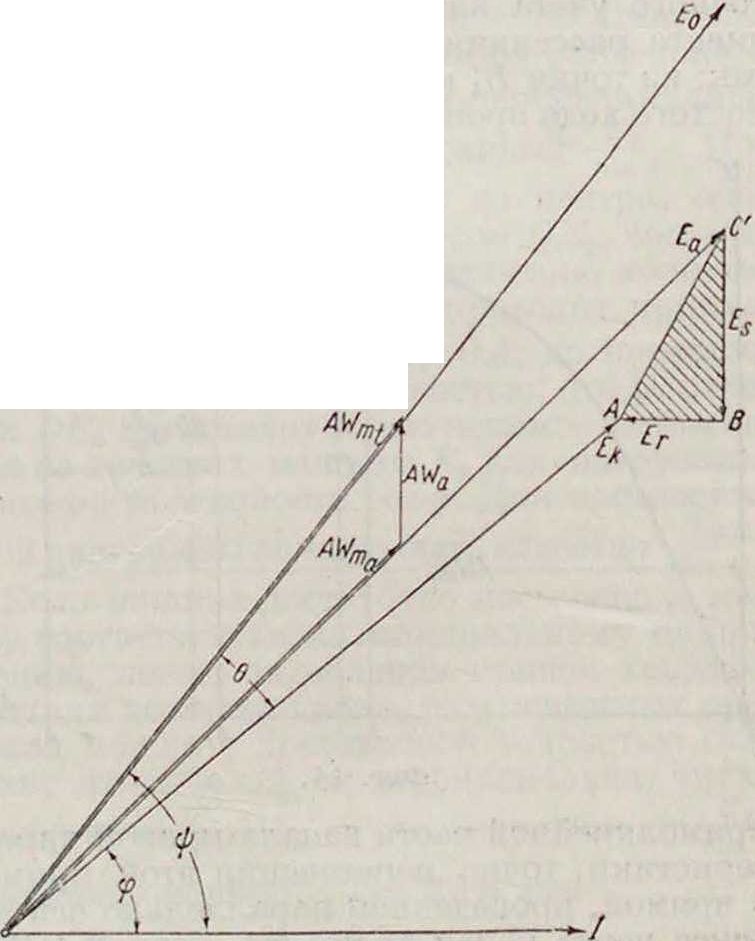
теоретически она применима лишь для этого типа синхронных машин. Практически оказывается, что диаграмма Потье прилолшмн также и для машин с явно выраженными полюсами, и расхождение результатов с теми, которые дает диаграмма Б.-А.-К., получается незначительным, в особенности для тех случаев, когда а, не очень мало и cos ψ <1. Т. к., кроме того, диаграмма Потье строится значительно проще, чем диаграмма Б.-А.-К., поэтому она и нашла себе более широкое применение в практике.
Ранее было уже указано, что построение диаграммы Потье связано
Фигура 49.
с отысканием угла у и требует, при неудаче, второго, а иногда и третьего построения; поэтому при практич. испытаниях синхронных машин обычно довольствуются построением диаграммы для случая повышения напряжения. С целью облегчения выполнения построений диаграмме Потье можно придать более компактный вид, повернув диаграмму ампер-
витков на угол — ; тогда вектор ампер-витков A W„, совпадет с вектором Е„, вектор AW„ направится перпендикулярно к вектору силы тока /, а вектор А 1Г„,( совпадет с вектором /<,’„, и вся диаграмма примет вид, изображенный на фигуре 49. Для построения диаграммы напряжения целесообразно воспользоваться теми же осями координат, в которых произведено построение кривых характеристики холостого хода и короткого замыкания. Ход построения диаграммы в этом случае легко уясняется из фигура 50.
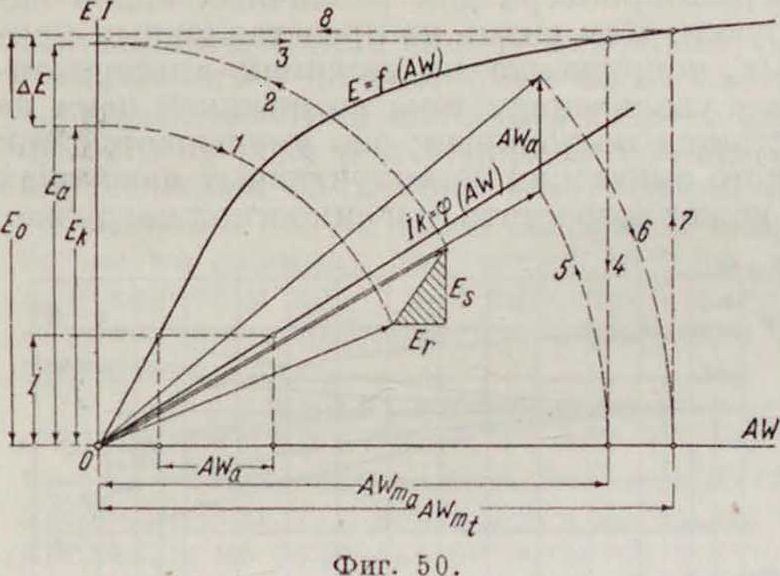
Характеристика синхронных генераторов переменного тока. Классификация характеристик. Электрические и магнитные свойства синхронных Г. п. т. выражаются также при помощи характеристик, представляющих собою зависимость между двумя какими-либо факторами, обусловливающими рабочий процесс машины. Обыкновенно синхронные Г. и. т. характеризуются следующими переменными величинами: а) фазным напряжением Elt б) силой тока в фазе 1и в) отдаваемой мощностью/, г) коэффициентом мощности cos ψ, пли отношением активной мощности к кажущейся мощности т Ь /, д) числом периодов переменного тока f, зависящим от числа полюсов машины и скорости относительного вращения якоря п, е) силой тока возбуждения машины /„,.
Различают следующие виды характеристик для альтернаторов: 1) холостого хода, 2) короткого замыкания, 3) внешнюю, 4) нагрузочную и 5) регулировочную. Характеристика холостого хода представляет собою зависимость фазного напряжения /?! от силы тока цепи возбуждения /,„ или от намагничивающих ампер-витков 111,, при постоянной скорости вращения и якоря или магнитной системы н отсутствии тока в фазовых обмотках; то есть эта ха-пактеристика изображает зависимость наводимой эдс в фазе от силы тока возбуждения; E1/i=E(fm) при /,=0 п п — Const или f — Const. Характери.ст и к а к о р о т-к о г о з а м ы к а и и я дает представление о том, как изменяется сила тока в фазе 1ц при коротком замыкании обмоток якоря от силы тока возбуждения /,„ и постоянной скорости вращения п или постоянной частоте /; 1ц=/*’(/,„) при Ет=0 и п=Const или /=Const. Внешняя характеристика представляет собою связь между фазным напряжением Ег и силой тока фазы /1при постоянной скорости вращения я,постоянной силе тока возбуждения /,„ и постоянном коэффициенте мощности cos ψ. Эта же характеристика может представлять собою зависимость между напряжением на зажимах машины Ек от линейной силы тока 1 при условии, что значения других величин, как то: п, /„, cos φ, остаются постоянными, Ек=Е(1) при Ек—0 и η — Const или /= Const. Нагрузочная характеристика устанавливает взаимоотношение между фазным напряжением Ег или линейным напряжением Ек и силой тока возбуждения /,„ при постоянной силе фазового тока 1и или линейного тока и при постоянном коэфф-те мощности cos ψ и постоянной частоте тока/; Ек=/’’(/,„) при Ix=Const, COS φ=Const и ιι=Const. Регулировочная характеристика показывает, как необходимо изменять силу тока возбуждения /,„ при различных изменениях нагрузки машины при условии, чтобы напряжение на зажимах Л’“, оставалось постоянным; /,„=/’(/) при Ек= Const, cos φ=Const и η=Const.
1) Характеристика холостого хода синхронных Г. п. т. [Ек =Е(1,„), f=Const, /j=0]. Как известно, наводимая эдс в альтернаторе
El(l=4А·-f-ιι-Φ· 10_8 вольт, где к—коэффициент, зависящий от формы кривой распределения магнитной индукции в воздушном зазоре и от устройства обмотки. Т. к. магнитный поток Ф зависит от намагничивающих ампер-витков (А I Vm=/,„· 11 „,), то при постоянной скорости вращения якоря или при /== Const наводимая эдс ч=Ι-Ίί = кг-1 (/„,).
На фигуре 51 представлен нормальный вид характеристики холостого хода альтернаторов. Как видно из изображенной кривой,вначале эдс возрастает почти прямолинейно. Наклон этой прямолинейной части характеристики зависит от воздушного зазора: чем меньше воздушный зазор, тем круче поднимается прямолинейная Фигура 51.
часть характеристики.
С увеличением возбуждения, вследствие насыщения железа, увеличения потока рассеяния и реакции от вихревых токов, повышение эдс происходит в значительно меньшей степени, и поэтому кривая характеристики холостого хода за своей прямолинейной частью имеет загиб в виде колена, а затем снова переходит почти в прямую линию, с гораздо меньшим наклоном по отношению к оси абсцисс. На основании имеющихся характеристик холостого хода можно исследовать магнитные и электрич. свойства машины. С помощью этих характеристик можно
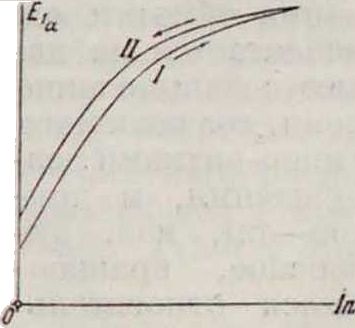
определить коэфф. и % насыщения машины, % ампер-витков междужелезпого пространства и ампер-витков железа.
2) Характеристика короткого з ам ы к а н и я синхро н н ы х Г. п. т. [/,=/(/,„), Ек—0, п—Const], При установившемся коротком замыкании в обмотке якоря альтернатора наводится эдс за счет результирующего действия намагничивающих ампер-витков обмотки возбуждения и реакции якоря; при этом наводимая эдс компенсируется общим падением напряжения в коротко замкнутом якоре. Т. к. индуктивное сопротивление х6 обмотки якоря, по сравнению с эффективн. сопротивлением ее га, велико, то сила тока короткого замыкания ]к отстает по фазе от результирующей эдс Е„к почти на четверть периода, и поэтому реакция якоря сводится к образованию лишь продольного размагничивающего поля.
Обычно в альтернаторах нормального типа кажущееся сопротивление цепи якоря невелико, и поэтому сила тока короткого замыкания достигает номинального значения при слабом возбуждении. Т. о., при мало насыщенной магнитной цепи машины, кривая характеристики короткого замыкания представляет собою вначале прямую, а затем, по мере увеличения насыщения, слегка загибающуюся к оси абсцисс линию (фигура 52). При коротком замыкании однофазного альтернатора (или при одно- и дву-нолюсном замыкании многофазного) в обмотке якоря протекает переменный ток, который создает переменное магнитное поле, то есть изменяющееся от + до —Н. Как известно, действие переменного магнитного поля м. б. приведено к действию двух постоянных магнитных полей, вращающихся во взаимно противоположные стороны с равными скоростями. Т. о., переменное магнитное поле, создаваемое током короткого замыкания обмотки однофазного альтернатора, разлагается на два ноля: одно—совпадающее с направлением вращения магнитного ноля, создаваемого ампер-витками возбуждения, и другое—так называемым инверсное, вращающееся относительно магнит, системы с двойной угловой скоростью. Инверсное магнитное поле, пересекая витки обмотки возбуждения, наводит в последней эдс, которые вызывают появление в цепи возбуждения ^переменных токов двойной частоты (фигура 53). В этом случае в цепи возбуждения действует пульсирующая эдс Ет, эфф. значение к-рой
Действительно, мгновен. значе ние результирующей эдс в цепи возбуждения e„v=Ет + е{=Е,п + V 2 -Et · sin 2wt,
Фигура 53.
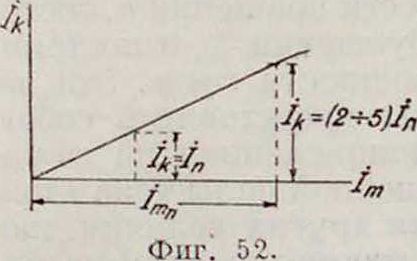
а эффективное значение вычисляется по ф-ле:
Ет>. =| т (Em + V”2"·Si-sin 2ωΐγ iit.
Под действием пульсирующей эдс в обмотке возбуждения течет пульсирующий ток,
эфф. значение силы которого Г,„г=У /"„+ 1} Для точных измерений силы тока возбулс-дения, при снятии характеристики короткого замыкания необходимо применять амперметры только по системе Депре-д’Арсон-валя или Вестона.
3) Внешняя характеристика с и н х р о н н ы х Г. п. т. ГЕк=Е(1) при /„,==Const, cos у,=Const, /’= Const], На фигуре 54 изображены кривые внешней характеристики альтернатора для различных видов нагрузки. Как видно из представленных кривых, напряжение на зажимах альтернатора с увеличением тока во внешней цепи не остается постоянным: оно уменьшается при чисто омических и индуктивных нагрузках и может возрастать при емкостной нагрузке.
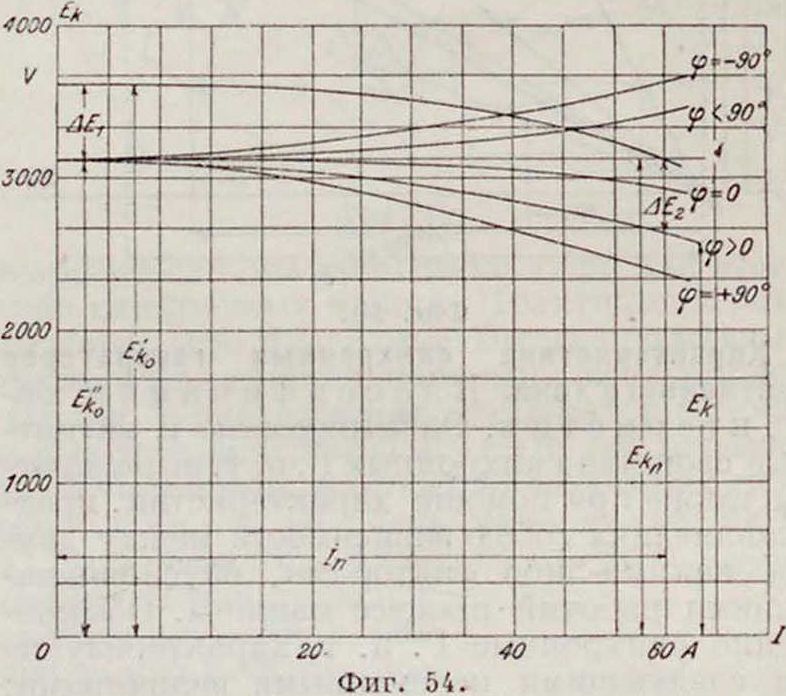
Для cos=1,0 кривая внешней характеристики имеет вид эллипса, оси которого совпадают с осями координат. Для cos <р=0 кривые имеют почти прямолинейный вид, причем эти линии имеют уклон: при опережа-ющем угле сдвига фаз (</>=— 90°)—вверх, а при отстающем (<=+90°)—вниз. Внешние характеристики позволяют определить т. и. %-ное изменение напрялюния для определения условий нагрузки. Обычно в альтернаторах, дающих постоянное напряжение, под изменением напряжения разумеют повышение напряжения при сбрасывании определенной нагрузки с определенным коэфф-том мощности, выраженное в процентах от номинального напряжения при полной нагрузке. В табл. 3 приведены данные относительно изменений напряжения в нормальных типах синхронных машин.
По нормам повышение напряжения в синхронных Г. п. т. допускается не свыше 50%.
4) II а г р у з о ч и а я характери с т и-ка синхронных Г. п. т. [hk= /’(/,„) при=Const, cos ψ=Const, м=Const]. Па фигура 55 изображены нагрузочные характеристики для различных видов нагрузок альтернатора. Как видно из фигуры, нагрузоч-
Т а б л. 3.—3 н а ч сине измене н и и н а п ри ж(кип пых машинах.
| Трехфазвые генера- | Значения и % при | Однофазные генера- | Значения в % при | ||
| торы частотою в 50 пер/ск. | COS ®== 1,0 | COS <f==0,8 | торы, частотою в 50 и 10’/. нер/ск. | COS <?==1,0 | COS <ρ—
=0,8 i |
| Малые быстроходные машины. | 8—10 | 20—25 | Малые быстроходн. машины. | 8—10 | 20—25 |
| Большие, непосредственно связанные с двигателем. | 10—12 | 25—28 | Большие, непосредственно связанные с двигателем. | 10—12 | 25—30 |
| Большие быстроходные .. | 15—18 | 30—35 | Большие быстроходные .. | 12—15 | 30—35 |
| Турбогенераторы. | 20—30 | 35—50 | Турбогенераторы. | 25—35 | 30—45 |
| Генераторы для элек-трич. тяги, частотою в 16*/« пер/ск. | 18—22 | 35—40 | |||
ные характеристики имеют вид кривых, располагающихся на диаграмме выше или ниже характеристики холостого хода—в зависимости от рода и величины нагрузки. Для определенной силы тока возбуждения при омической и индуктивной нагрузках напряжение на зажимах получается меньше, чем при холостом ходе; при емкостной нагрузке, наоборот, наблюдается повышение напряжения.
5) Регулировочная характеристика синхронных Г. п. т. [/„,=/>’ (/) при Ек— Const, cos ψ=Const, /= Const]. В синхронных Г. и. т. с изменением нагрузки напряжение на зажимах не остается постоянным, поэтому для поддержания напряжения на зажимах машины постоянным необходимо регулировать силу тока в цепи возбуждения. В современных синхрон, машинах, для поддержания постоянства напряжения при изменении нагрузок машины от нуля до максимума, требуется регулировка силы тока возбуждения в широких пределах. На фигуре 56 представлены регулировочные кривые для различных видов нагрузки альтернатора. Из этих кривых видно, что для поддержания напряжения на зажимах машины
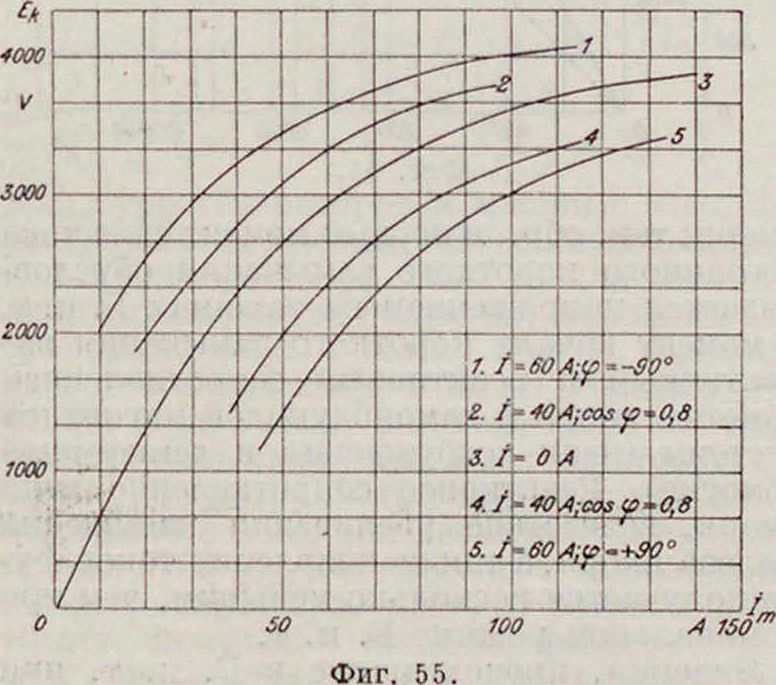
постоянным при возрастании омической или индуктивной нагрузок необходимо силу тока возбуждения увеличивать; при увеличении же емкостной нагрузки, наоборот, возбуждение приходится уменьшать. Отношение и синхро и- силы тока возбуждения 1т, соответствующ. полной нагрузке, к силе тока возбуяедения /ИЦ) при холостом ходе, при условии, что в обоих случаях напряжение на зажимах машины остается постоянным, служит мерой регулировки возбуждения. Для индуктивных нагрузок альтернаторов отно-
1т,
шение у— >1 и в неко-
ч»,
торых случаях достигает значения от 1,5 до 2,0; при емкостной нагрузке эта величина < 1.
На основании регулировочных характеристик, снятых при нагрузках с коэффициентом мощности cos φ=1,0 и cos <р~0, можно построить регулировочную характеристику
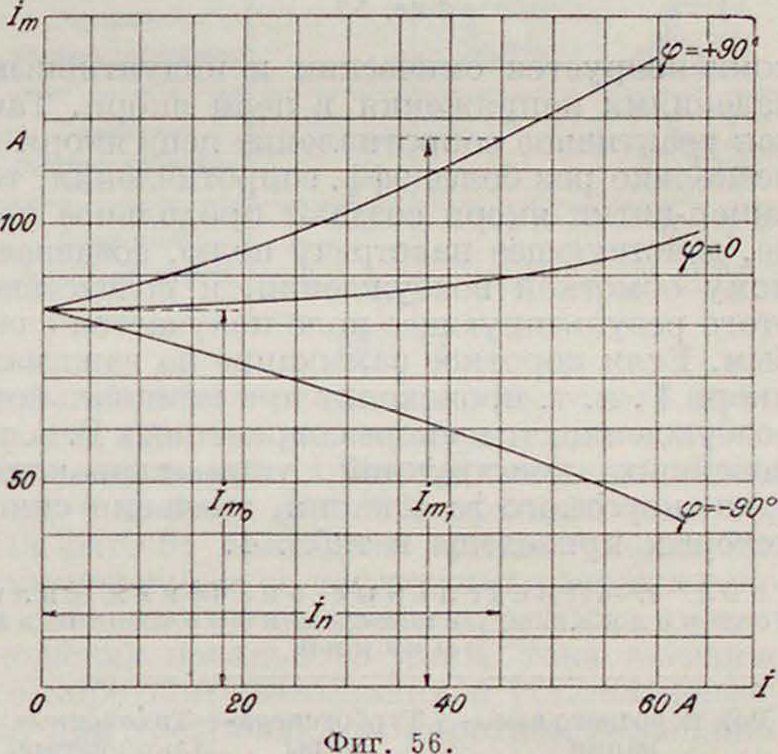
для нагрузок с любым значением cos φ. Т. к. магнитное насыщение в альтернаторах изменяется сравнительно мало при увеличении нагрузки от нуля до максимума, то силу тока возбуждения можно разбить на три составляющие, а именно: на силу тока холостого хода /,„0 и силы тока /„, и ],„г, компенсирующие соответственно изменения напряжения от действия активной составляющей I · cos φ и реактивной составляющей I sin φ тока нагрузки, то есть
Л»·= Ч ч + ч
Значения 1т и 1т можно легко найти по кривым регулировочной характеристики, для чего по оси абсцисс откладывают значения /· sin φ и I- cos φ·, тогда отрезки соответствующих ординат, заключенные между регулировочными кривыми для cos φ=0 и cos φ =1,0 и горизонтальной прямой, прове денной на высоте I,
И!0>
дают значения 1ти /,„г. Откладывая суммы /Шо + /,„г + !,„а по ординатам, соответствующим силам тока I, молено найти точки, принадлежащие искомой регулировочной кривой. Построение регулировочной характеристики таким способом изображено на фигуре 57.
Короткое замыкание синхронных генераторов переменного тока. I. Установившееся короткое замыкание. При установившемся коротком замыкании альтернатора наводимая в обмотке якоря эдс
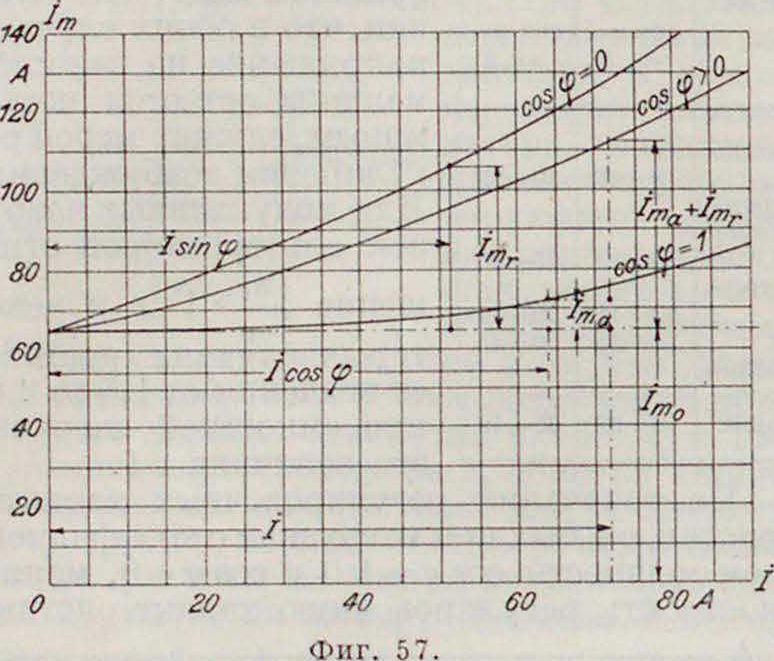
компенсируется омическим и индуктивным падениями напряжения в цепи якоря. Так как реактивное сопротивление цепи якоря в несколько раз более эфф. сопротивления, то ампер-витки якоря создают продольное поле, действующее навстречу полю, создаваемому обмоткой возбуждения, и вследствие этого результирующее поле получается слабым. Если короткое замыкание на зажимах якоря Г. п. т. происходит при номинальном возбуждении, то в якоре современных Г. п. т. новейших конструкций устанавливаются токи короткого замыкания, значения силы которых приведены в таблице 4.
Таблица 4. — Предельные значения силы установившегося тона поротного а а-м м н а и и н.
| Род короткого замыкания | Турбогенера торы | Тихоходные альтернаторы |
| З-полюсиое.
2-нолюсное. 1-иолюсное. |
2.0 номин.
3.0 » 5,0» » |
2,5 I номин. 3.75 » » 6.25 » » |
Обычно в Европе, в отношении короткого замыкания, к синхронным машинам предъявляют требование, чтобы у_устан. ток кор, замык. при возбужд. хол. хода
0_ номинальный ток или ток возбужд. 7», при хол. ходе и номин. напряж.
А =--ϊ____
ток возб. 1„,а при кор. замык. и ном. токе якоря были ss 0,5 (фигура 58). В Америке рекомендуется значение К=Y0 Орать=1,4 у/~,
где Ь—коэфф. магнитного насыщения (обычно Ь равно от 1,2 до 2,0).
Значение силы установившегося тока короткого замыкания в многофазных машинах зависит от вида короткого замыкания. В трехфазных Г. п. т. сила установившегося тока короткого замыкания равна: при трехполюсном коротком замыкании
j _.
V3 ~ у Х’+Н’ ’
-ном коротком за!
V{ψ-ху+я“
при двуполюспом коротком замыкании _ Е.-Я.
v./2 - rjyJT
при однополюсном коротком замыкании
£,·Ε0
+Т з
В этих ф-лах /-.’о—эфф. фазовое напряжение холостого хода, соответствующее заданному току возбуждения, X—т. н. синхронный ре-актанц, состоящий из реактанца рассеяния и реакции якоря, /i - активное сопротивление якоря, τ—коэфф. рассеяния, £—общий коэффициент, учитывающий насыщение железа. В табл. 4 приведены соотношения токов для различных видов установившегося короткого замыкания.
II. Внезапное короткое замыкание. При внезапном коротком замыкании, совершающемся в возбужденном до номинального напряжения Г. п. т., переход от первоначального состояния до практически установившегося режима короткого замыкания происходит не мгновенно, а в течение некоторого промежутка времени, потребного для рассеяния запаса магнитной и электрич. энергии в тепло. В первый момент внезапного короткого замыкания магнитодвижущая сила якоря, вследствие влияния токов Фуко, не вызывает заметной реакции
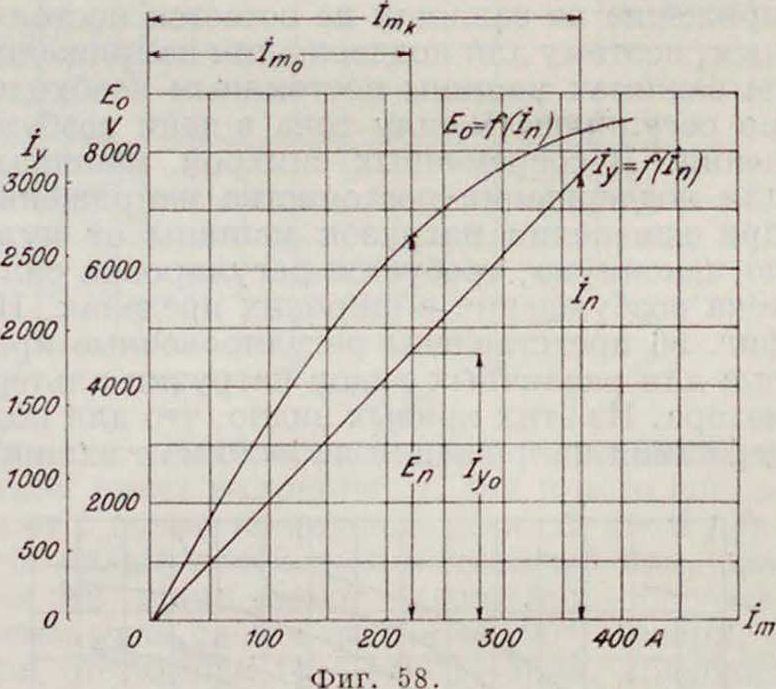
якоря; так. обр., в первый момент сила тока внезапного короткого замыкания обусловливается напряжением на зажимах Г. и. т. в момент начала короткого замыкания эффективным и реактивным сопротивлением обмотки якоря и самоиндукцией магнитной системы (цепи возбуждения и демпферной обмотки). Реактивное сопротивление цепи якоря, вследствие увеличения насыщения железа якоря, а также появления токов Фуко получается несколько меньшим, чем при номинальном режиме Г. п. т.
Явления, происходящие в Г. п. т. при внезапном коротком замыкании, имеют весьма сложный характер. При внезапн. коротком замыкании обмотки якоря Г. п. т., явления перехода от одного состояния в другое представляют собою нестационарный элек-трическ. процесс двух цепей,—обмотка яко-
ря и обмотка возбуждения—связанных между собой в магнитном отношении. Теоретические и экспериментальные исследования показывают, что после внезапного короткого замыкания в цени якоря протекает ток, составляющими которого являются: 1) установившийся ток короткого замыкания 1у, имеющий частоту /; 2) мгновенно ударный переменный ток Гк частоты /", система которого связана с обмоткой возбуждения, и
3) ток V очень малой частоты f, система которого связана с обмоткой якоря и к-рый представляет собою как бы мгновенно ударный постоянный ток, причем две последние составляющие тока постепенно затухают. Частоты f и /", а также затухание токов зависят главн. обр. от отношения активного сопротивления к самоиндукции рассеяния. Затухание токов ]к и Гк происходит по закону показательной функции.
На фигуре 59 приведены осциллограммы ударных токов цепи якоря (кривая 7), а также токов в цепи возбуждения (кривая 2) при трехполюсном коротком замыкании. Начальное значение каждого из токов получается, как при любом переменном токе, в виде частного от деления действующего напряжения на кажущееся сопротивление.
Фнг. 59.
Т. о. составляющие токи внезапного короткого замыкания 1 и 1" в начальный момент замыкания выражаются след, обр.:
/<__/"___£ ®я
Jk ‘к ш - L » Е,
Наибольшее значение суммарного ударного тока можно определить из след, формулы:
1тк=1 е
π · р τϊ · Oj
и» · s, £ ω · τ · Lx —
= /„
+ e
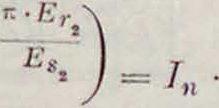
F.
bs
Для турбогенераторов и машин с явно выраженными полюсами,снабженных демпферной обмоткой, коэфф. х es 1,8; для машин с явно выраженными полюсами, имеющих слабую демпферную обмотку или не имеющих ее вовсе, этот коэфф-т имеет меньшее значение. Если Г. п. т. в момент внезапного короткого замыкания уже имел некоторую нагрузку, то нагрузочный ток не может после короткого замыкания внезапно измениться; поэтому он течет совместно с выравнивающими токами через место короткого замыкания, слагаясь с ними по фазе.
К современным Г. и. т. предъявляют требования, чтобы максимальный ударный ток внезапного короткого замыкания не превосходил 15-кратной амплитуды номинального тока; с этой целью в Г. и. т. необходимо применять реактанц рассеяния не менее 12%. На фигуре 60 приведены различные виды ко ротких замыканий, которые могут наступать в одно-, двух- и трехфазных Г. п. т.; в таблице 5
Таблица 5.—3 паче и и я силы ударного тока короткого з а м ы к а к и я.
| Вид короткого замыкания | 1 | 2 3 | 4 5
1 |
6 7 8 | 9 |
| Соотношение ударн. токов | 75 | 106 150 | 75 |s6,8 | ice j 173 100 | 100 |
приведены данные, показывающие соотношения ударных токов для указанных на
Генераторы переменного тона
| Короткое замыкание | Однофазный | Двухфазный | Трехфазный |
| Однофазное (клемма - нейтраль! | ГГ | M | |
| Однофазное (между клеммами) | гА4- | ||
| Двухфазное (клемма-нейтраль) | |||
| Трехфазное (клемма -нейтраль) | |||
| Трехфазное (между клеммами) |
Фнг. 60.
фигура 60 видов внезапного короткого замыкания, причем значения ударного мгновенного тока при трехполюсном замыкании (смотрите 8 и .9 на фигуре 60) приняты за 100%. На фигуре 61 приведены кривые уменьшения симметричных составляющих ударных токов в зависимости от времени, а также и от отношения начального ударн. тока внезапного короткого замыкания к установившемуся при трехполюсном коротком замыкании.
Внезапное короткое замыкание сопровождается: 1) механическими воздействиями на статор и ротор, 2) электродинамическ. силами, действующими на обмотки статора и ротора, 3) явлениями перенапряжений в обмотках, 4) нагреванием обмоток. Так как в начальный момент внезапного короткого замыкания магнитное поле в воздушном зазоре
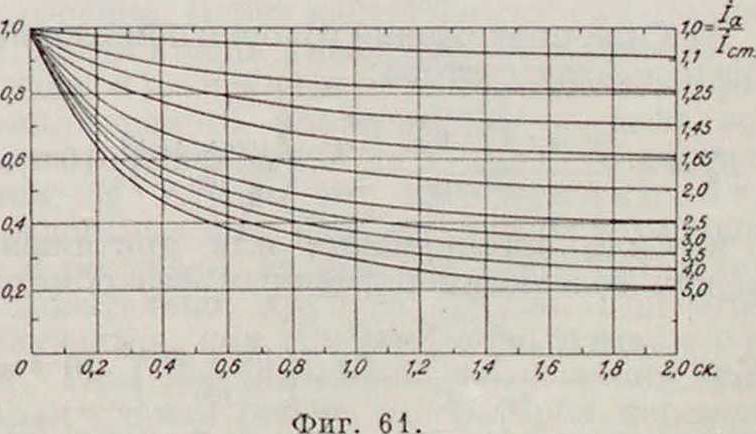
Г. п. т. имеет свое полное значение, то мгновенный ударный вращающий момент находится в таком же отношении к номинальному вращающему моменту машины, как мгновенные ударные токи короткого замыкания—· к номинальному току. Вращающий момент короткого замыкания в машинах новейшего типа превышает номинальный момент приблизительно в 15 раз; в машинах же более ранних конструкций это отношение доходит до 30. Вращающие моменты при коротком замыкании действуют резким ударом на вал и муфту, а также на двигатель, приводящий в движение Г. и. т., и на фундамент последнего. Хотя эти механпчоск. ударные действия и затухают быстро, но первые толчки могут вызвать тяжелые механические разрушения, если в конструкциях Г. п. т. и двигателя
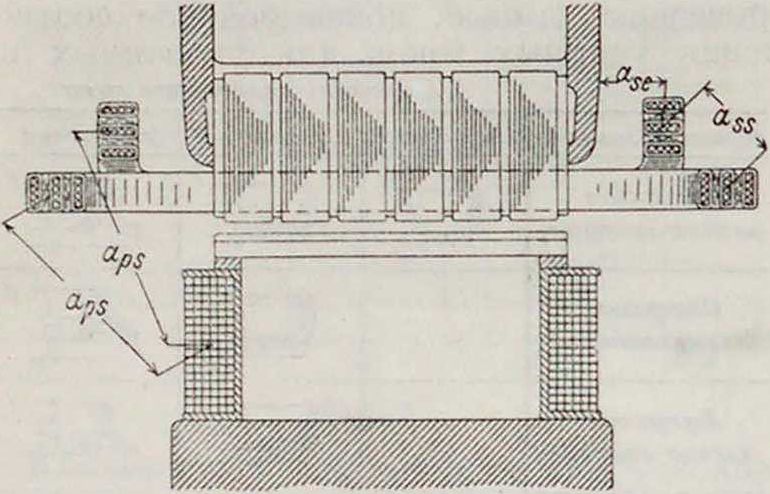
Фигура 62.
и нх фундаментов не обратить на это надлежащего внимания. Наряду с сильными сотрясениями ротора и статора, при внезапном коротком замыкании возникают большие механические усилия в обмотках, вследствие электродинамич. действия ударных токов короткого замыкания. Эти силы м. б. опасными для обмоток, особенно для лобовых частей их, поэтому на крепление их должен быть обращено особое внимание. Электродинамич. эффект создает притяжение лобовых частей к железу статора; кроме того, отдельные лобовые части притягиваются и отталкиваются между собой, а также взаимодействуют с обмоткой возбуждения. Механич. усилия, действующие на головки обмоток, вычисляются по следующим ф-лам. а) Сила отталкивания между катушкой обмотки возбуждения и головкой обмотки якоря:
2,04 1тг * Па · Яп * * 1 ntj. ·
аР8 *
• ршг1) · ю-8 *»
б) Сила притяжения головки обмотки якоря к железу статора:
Ft=·
1,2 la · о~ д“ I"
1 4 а 1 а и
“2 ·
к 100+ Δ», 2 ’ ЮО )
г I 10-8 кг. в) Сила отталкивания или притяжения между головками различных фаз обмоток:
К
0,51 Is
: +-----
««
и-
1“
100 + Δβ, Ч2.
V loo )
ю-
В этих ф-лах Г—наибольший мгновенный ударный ток; ls—длина головки обмотки; а—число параллельных ветвей;as—расстояние от середины головки обмотки якоря до железа (фигура 62); «Ss—расстояние между головками различных фазовых обмоток; afls— расстояние между серединой поперечного сечения катушки обмотки возбуждения и серединой поперечного сечения головки обмотки якоря; да—число проводников, заложенных в пазу; < а—число пазов, приходящихся на полюс и фазу; wm —число витков обмотки возбуждения, приходящихся на 1 полюс; 1т—средняя ширина лобовой части катушки возбуждения в направлении вращения; /Я| —максим, ток возбуждения;
А?·!—внутр. падение напряжения при нагрузке до внезапного коротк. замыкания (в %).
Так как при внезапном коротком замыкании происходит быстрое нарастание тока, то в обмотках Г. п. т. индуктируются высокие напряжения. Эти перенапряжения м. б. опасны для изоляции обмоток, в особенности в этом отношении подвержена действию перенапряжения обмотка возбуждения. С целью уменьшения перенапряжений и предохранения обмоток возбуждения от пробоя изоляции Г.п.т. снабжаются демпферной обмоткой. В турбогенераторах демпферной обмоткой являются металлическ. клинья ротора, которые должен быть надежно электрически соединены с капотами, или бандажами, удерживающими головки обмоток возбуждения от выгибания под действием центробежных сил.
От сильных токов короткого замыкания проводники, по которым они протекают, нагреваются очень быстро до высоких 1°, опасных как для проводок, так и для всех окружающих частей их. Поэтому сечение проводников обмотки Г. п. т. должно быть точно рассчитано; обычно оно рассчитывается т. о., чтобы тепловая энергия, развиваемая током внезапного короткого замыкания, поглощалась только самой обмоткой (теплоемкостью), т. к. вследствие короткого времени действия внезапного короткого замыкания отвода тепла в окружающую среду не происходит. С целью уменьшения разрушительных последствий внезапн. короткого замыкания, Г. п. т. снабжают защитными приспособлениями; кроме того, возбуждение Г. п. т. устраивают
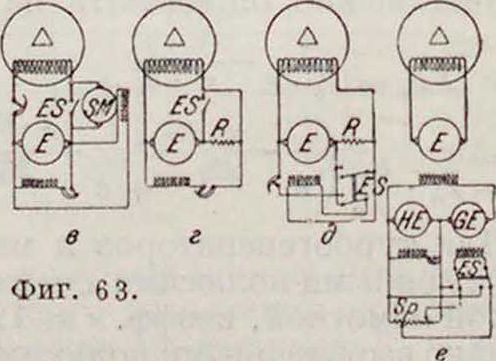
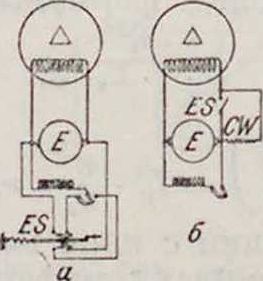
т. о., чтобы при внезапных коротких замыканиях происходило уничтожение главного магнитного поля и; вследствие этого, более быстрое спадание переходных токов и ослабление установившегося тока короткого замыкания. Наиболее употребительные схемы возбуждения, преследующие эти цели, приведены па фигура 63, где Δ—трехфазпый генератор, Е—якорь возбудителя, НЕ—вспомогательный возбудитель, СЕ—противодействующий возбудитель, CW—противодействующая компаундиая обмотка, S3/—пусковой мотор, ES—выключатель для размагничивания, Sp—делитель напряжения и Н—сопротивление.
Параллельная работа синхронных генераторов переменного тока совместная работа нескольких Г. п. т. или одного генератора совместно с сетью переменного тока, причем одноименные зажимы якорей соединяются между собою электрически непосредственно или через относительно небольшие индуктивные сопротивления. Включение Г. п. т. на параллельную работу производится при соблюдении следующих условий: 1) напряжения на зажимах должны быть одинаковы; 2) напряжения на зажимах, подлежащих соответственному соединению между собой, должны совпадать по фазе; 3) частоты должен быть равны. В случае многофазных машин необходимо также, чтобы направление чередования фаз было одинаково.
Для выполнения всех этих условий Г.п.т., который желают приключать параллельно к сети или к другому альтернатору, приходится синхронизировать, для чего напряжение и скорость вращения Г.п.т. регулируют так. обр., чтобы наступил полный синхронизм, то есть, чтобы произошло полное совпадение напряжения как по фазе,так и по величине, частоте фигура с4. и порядку чередова ния фаз. Наблюдение за наступлением полного синхронизма производится по синхроноскопам. Простейшим видом синхроноскопа являются лампы или вольтметры, приключаемые к зажимам параллельно присоединенных машин. На фигуре 64 приведена схема присоединения синхронизирующих, или так называется фазовых, ламп для случая параллельного присоединения однофазного альтернатора к сети. Как только наступит полный синхронизм, лампы будут находиться под напряжением ок. О, вследствие чего они потухнут, и тогда рубильник м. б. замкнут. Однако, достигнуть полного синхронизма перед включением практически не представляется возможным, так как при регулировке скорости вращения приключаемого Г. п. т. всегда получается, что его частота тока несколько отличается от частоты тока сети /, то есть
Вследствие этого, в электрич. цепи, которая образуется сетью и приключаемыми Г. п. т., присоединенными через лампы (фигура 64), действуют одновременно две эдс
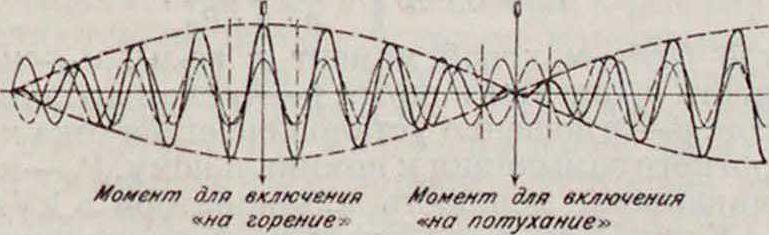
-Напряжение сети — —— Результирующее
----Напряжение приклю- напряжение чаемой машины — —-Огибающая кривая
Фигура 65.
двух разных частот: f и Д. В результате такого действия двух изменяющихся по закону синуса движущих сил получаются т. н. биения (фигура 65), при которых лампы начинают то тухнуть, то загораться. Частота этих биений получается тем меньшей, чем меньше разнятся друг от друга частоты f и f. Если при синхронизации удается добиться того, что частоты f и /, почти совпадают, то затухание и загорание ламп происходит очень медленно. Уловив момент, когда результирующее напряжение делается 0, что наблюдают по затуханию ламп, включают рубильник, и приключенная т. о. синхронная
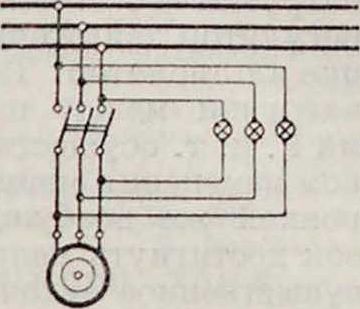
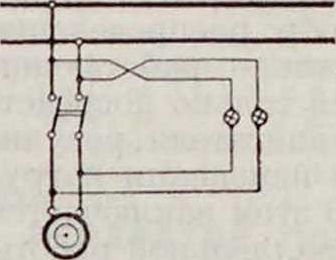
Фигура 66. Фигура 67.
машина, совершив несколько колебаний, под действием синхронизирующих сил входит в полный синхронизм. Присоединение синхронизирующих ламп для однофазных Г. п. т. можно осуществить по схеме фигура 66. При этом легко понять, что при наступлении полного синхронизма лампы должны гореть полным накалом. Включение ламп по схеме фигура 64 называют включение м н а п о т у х а н и е, а указанное на фигуре 66— включением на горение. При параллельном включении трехфазпых Г. п. т. присоединение синхронизирующих ламп производится трояким образом, по схемам фигура 67—69. При наступлении полного синхронизма, лампы, включенные по схеме
Фигура 68. Фигура 69.
фигура 67, должны потухнуть, а лампы, включение которых осуществляется но схеме фигура 68,—гореть под напряжением сети; так. обр. схема фигура 67 представляет включение на потухание, а схема фигура 68—включение на горение. Перед наступлением синхронизма, когда в цепи имеют еще место биения, в случае правиль и ого чередования фаз приключаемого альтернатора и сети, все лампы одновременно то тухнут, то загораются ; в случае же неодинакового чередования фаз, фазовые лампы загораются и потухают не все одновременно, а последовательно, друг за другом; при этом получается, как говорят, вращение огня. При неодинаковом чередовании фаз параллельная работа генераторов переменного тока является невозможной; для установления одинакового порядка чередования фаз необходимо произвести перекрещивание фаз, то есть взаимное пересоедине-ние двух каких-либо зажимов.
Параллельное включение Г. п. т. является одной из самых ответственных операций при эксплоатацни электрич. станций, и всякие
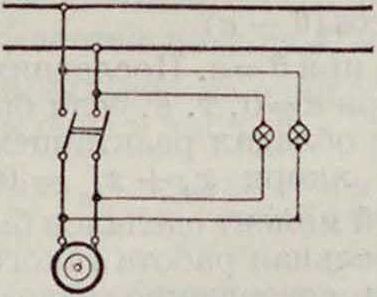
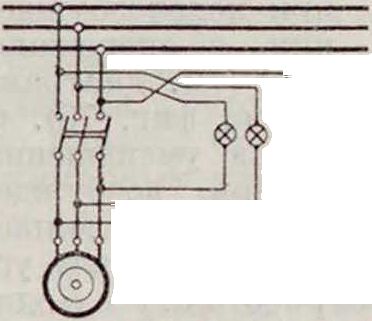
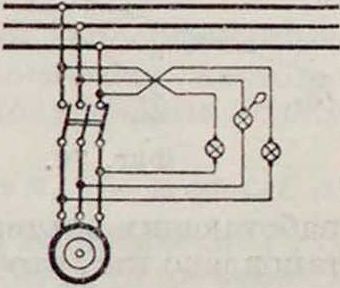
упущения здесь могут повести к авариям. В последнее время стали находить применение специальные аппараты, посредством которых осуществляется автоматам. включение Г. и. т. на параллельную работу. В альтернаторах высокого .напряжения синхронизирующие приборы приключаются через трансформаторы напряжения.
Когда Г. п. т. приключен к сети, то для нагрузки его необходимо воздействовать на регулятор двигателя, приводящего в движе-ние альтернатор. Таким обр. распределение нагрузки между параллельно работающими Г. п. т. осуществляется только посредством изменения мощности двигателя, регулировкой же возбуждения изменения нагрузок достигнуть нельзя. В этом заключается существенное отличие параллельной работы синхронных Г. п. т. от параллельной работы генераторов постоянного тока, нагрузка которых устанавливается путем изменения силы тока возбуждения. Регулировкой возбуждения Г. п. т., приключенного параллельно к сети, достигается только изменение реактивной составляющей тока, причем, в случае перевозбуждения, альтернатор работает с отстающим током, а при недовозбужде-нии—с опережающим (смотрите диаграммы на фигуре 70). С целью уменьшения потерь, возбуждение у параллельно работающих альтернаторов должно быть установлено так, чтобы они работали все с одинаковым коэффициентом мощности (cos φ).
Если Г. п. т. приключен параллельно к сети, то при нагрузке его между вектором напряжения сети Ек и вектором эдс альтернатора, соответствующей току возбуждения устанавливается угол сдвига фаз 0, который зависит от мощности, отдаваемой альтернатором. В случае работы параллельно присоединенной к сети синхронной машины, в качестве генератора, вектор Епд опережает вектор Ек при этом зависимость между углом 0 и мощностью Р<? определяется по формуле:
Р<?=γ [Е„0 sin (0 + а) - Ек sin я].
Так как ssO, то
Р=I“. Е„0 · sin 0,
где Z=у(ха + я-„а)‘ + rjj — полное сопротивление якоря. Обычно для номиналы!, мощности угол 0 равен 10—20°. Для того, чтобы Г. п.т. мог отдать мощность Р=Ек I · cos ψ,
необходимо, чтобы двигатель доставлял ему механичесв. мощность, эквивалентную всей
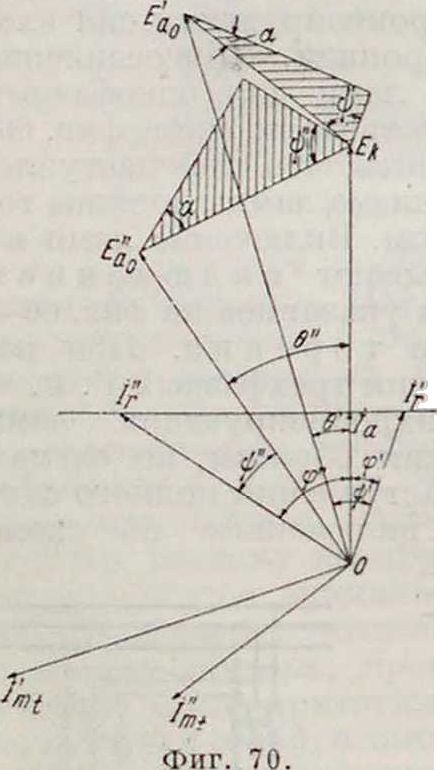
электромагнитной мощности альтернатора:
Рт=Р,па 1а- COS ψ.
Если нагрузка параллельно приключенного Г. п. т. изменяется, то переход от одного режима к другому сопровождается колебаниями, причем за время неустановившегося состояния на вращающуюся систему действуют три вида моментов: 1) момент синхронизирующей силы Ms, 2) момент, обусловленный силами инерции вращающихся масс, Mj, 3) момент, вызываемый действием демпферной обмотки, Md. Синхронизирующий момент Ме при изменении угла 0 стремится всегда вернуть вращающую систему к прежней синхрон, скорости; он создает торможение, если двигатель сообщает альтернатору ускорение, и действует ускоряющим образом, если двигатель уменьшает крутящий момент. Синхронный момент пропорционален
Mg - Ек- cos(0-«)
Ек 1Ук · cos (Θ — а)
и достигает максимума при 0=к. Последняя формула показывает, что при «=0, то есть если бы синхронный Г. п. т. не обладал реактанцем рассеяния и реакцией якоря ха + xg=0, этот синхронизирующий момент сделался бы равным нулю, и параллельная работа такого альтернатора была бы совершенно невозможна. Теоретически, синхронизирующий момент при холостом ходе достигает максимума при к=45°, то есть когда ra=x„+xsОсуществление последнего условия в нормальных Г. п. т. вызывает большие практич. затруднения (ведет к удорожанию машины и увеличению токов короткого замыкания); поэтому современные машины рассчитываются т. о., чтобы -п---- равнялось 10—20;
г а при этом параллельная работа оказывается вполне обеспеченной. Моменты, создаваемые инерцией вращающихся масс, как известно, пропорциональны маховому моменту GJP и углов, ускорению т. e. М} —GPP d"· ·
Момент, создаваемый демпферной обмоткой, пропорционален скорости изменения угла от некоторого среднего положения при качании альтернатора, т. e. Мл=d°t. Во время переходного состояния собственные колебания Г. и. т. совершаются с определенным периодом, который может быть определен по формуле Розенберга:
7’=0,032
Г GD* п У V у Рп где GD2—маховой момент в килограммах-м2, п—скорость вращения в об/м,р—число пар полюсов, у—отношение установившегося тока короткого замыкания к поминальному,Р„—номинальная мощность альтернатора в kVA.
Если Г. п. т. работает не параллельно с сетью большой мощности, а параллельно с другим альтернатором, то при переходе от одного режима к другому обе машины приходят в колебательное состояние, при этом период колебания
Г* р (GZ>2)2 + Т р (GD2)i р (GD2)· + р (СП2),
где Ί и Ί —соответствующие периоды собственных колебаний для случая параллельной работы каждого альтернатора отдельно на сеть большой мощности, р—число пар полюсов, (6712), и ((г1)г)г—маховые моменты альтернаторов. Демпферные обмотки увеличивают период собственных колебаний Г.п.т.
Если Г. н. т. приводится во вращение посредством двигателя, ход которого неравномерен (например, двигатели Дизеля, паровые машины), то этот двигатель вынуждает ротор альтернатора колебаться. В этих случаях, при осуществлении работы Г. п. т. параллельно с сетью или с другим альтернатором, необходимо обращать внимание на то, чтобы частота вынужденных колебаний как основных, так и высшего порядка не совпадала с частотой собственных колебаний альтернаторов. Иначе получается явление резонанса, и совместная работа нескольких Г. п. т. становится невозможной. Основная частота вынужденных колебаний определяется по формуле fi=-’ф · г,-, где vt — число импульсов на один оборот. Значения г,· приведены в таблице 6.
Таблица 6.—Число импульсов вынужден-пых колебаний за 1 оборот.
| Наименование первичных двигателей | |
| И ароные м а ши н ы | |
| Одноцилиндровые и двойного расширения | |
| тендем | 2 |
| Двойного расширения, с кривошипом под | |
| УГЛОМ В 30°.. | 4 |
| Тройного расширения, с кривошипом под | |
| углом В 120°.. | 6 |
| Двигатели внутреннего его- | |
| р а н и я | |
| Одноцилиндровые четырехтактные. Двухцилиндровые четырехтактные и одно- | V* |
| цилиндровые двухтактные. | I |
| Λ’-цилиндровые четырехтактные. | jv/i 1 |
Потери и нозфф-т полезного действия гене-раторов переменного тока. Потери, имеющие место в Г. п.т., можно разбить на следующие группы: 1) потери в магнитной цепи (или, как их часто называют, потери в железе), которые, в свою очередь, подразделяются на потери на гистерезис и потери на токи Фуко; 2) потери в электр ич. ц е-п и, или джоулевы потери, которые образуются при прохождении тока по обмоткам машины (якоря возбуждения) и через контактное сопротивление между щетками и кольцами; 3) м е х а н и ч. потери, которые разделяются на потери на трение в подшипниках н потери на трение щеток о контактные кольца; 4) потери на трение о воздух и потери на вентиляцию; 5) дополнительные потери, состоящие из добавочных потерь в железе якоря или других частей магнитной цепи машины, вызываемые искажением магнитного потока вследствие недостатков механической обработки деталей, не поддаются точному учету; к дополнительным потерям относятся также потери па токи Фуко в болтах, стягивающих листы якорного железа, потери на токи Фуко в проводах, вызываемые насыщением в зубцах якоря вследствие искажения глав ного потока, потери от уравнительных токов в параллельно соединенных ветвях электрической цепи.
Кпд синхронных Г.п.т. ?; определяется как отношение отдаваемой мощности в kW к отдаваемой мощности в kW+ потери в kW.
Лит.: Холуянов Ф. И., Альтернаторы и преобразователи переменно-постоян.тока.3 изд., М.—Л., 1926; Т о л в и некий В. А., Электр ячеек, машины, ч. II—Синхронные машины, лнтогр. изд., П., 1923; К у л е б а к и н В. С., Синхронные Электр, машины. Расчетная записка генератора, М., 1927; К у р б а-т о в С. И., Параллельная работа синхронных машин, лнтогр. изд., Москва, 1924; К о t Ii К., Alterna-teurs et moteiirs synchrones, t. 1, P., 1924; Barbi 1-1 i 0 n L. et An t oi n e H., Lcs alternateurs industriels, P. 1919; Arnold E. u.La Со u r J.,Dic synchro-nen Wecliselstrotnmaschinen, Generatoren, Motoren u. Uinformer, Berlin, 1913; Я i c li t e r R., Elektrische Maschincn, B., 1924. В. Кулебакин.