 > Техника, страница 40 > Групповой привод
> Техника, страница 40 > Групповой привод
Групповой привод
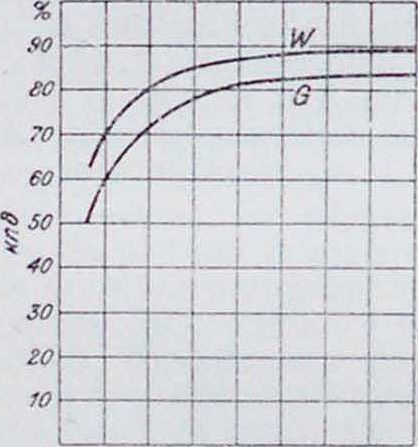
Групповой привод, привод, при к-ром один мотор обслуживает несколько рабочих машин при посредстве промежуточных передач. При Г. п. регулирование числа оборотов мотора не производится; главное достоинство его в том, что число оборотов остается при всех нагрузках почти постоянным. Исключение представляют лишь приводы при работе с машинами, имеющими толчкообразную нагрузку, например, падающий молот. В этих установках для сглаживания толчков, действующих на мотор, применяют особые вращающиеся массы. При этом желательно иметь нек-рое уменьшение числа оборотов мотора при перегрузках, чтобы маховые массы восприняли перегрузочные толчки. Для Г. п.без изменения числа оборотов лучше применять асинхронный мотор, так как он по сравнению с мотором постоянного тока имеет ряд преимуществ: 1) более дешевую стоимость установки. 2) более простой уход и 3) лучший кпд. На фигуре 1 показана кривая кпд асинхронного мотора (IF) и шунтового мотора постоянного тока (G) для равных мощностей и чисел оборотов. В приводах с толчкообразной нагрузкой при применении асинхронного двигателя приходится для увеличения скольжения включать в цепь ротора сопротивление, которое остается включенным во все время работы; при этом о css о,so 0,75 1.0 кпд мотора, есте-
Нагрузка ственио, ухудшает-
Ф„г. i. ся. Там, где имеет ся постоянный ток, целесообразнее применять компаундный мотор, компаундная обмотка которого должен быть рассчитана т. о., чтобы при толчкообразных перегрузках уменьшение числа оборотов мотора доходило до 5—10%.
Установка моторов при Г. п. внизу под трансмиссией требует устройства отвесной ременной передачи, что является неэкономичным; кроме того, при всех подтягиваниях ремня приходится применять вспомогательные конструкции или натяжные ролики. Наиболее рациональным является привод при горизонтальном или почти горизонтальном расположении ременной передачи, по в таких случаях мотор приходится устанавливать на консолях к стене или подвешивать под потолком. Экономически бы
вает выгодно применять быстроходные моторы, так как вес быстроходного мотора значительно меньше, акоэфф. мощности выше, чем тихоходного. Наоборот, бывает выгоднее иметь незначительное число оборотов трансмиссии (для трансмиссий текстиль-пых фабрик число οδ/м. колеблется от 250 до 500; для деревообделочных мастерских— от 200 до 400; для машиностроительных заводов—от 100 до 200), т. к. мощность холостого хода трансмиссии зависит от числа оборотов и м. б. определена (в IP), приблизительно, по формуле:
W= "Guin,
GO · 100 · 75
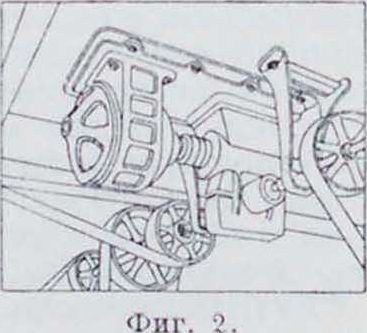
где μ—коэфф. трения (для подсчетов можно принять μ =0,13 на основании опытных данных для трансмиссии с диаметром 55 миллиметров; при этом учтены все вредные сопротивления, как то: трение о воздух, некоторая неточность установки и up.); G—вес трансмиссии в килограммах, (I—диам. вала в см; п—число об/м. Уменьшение числа оборотов трансмиссии м. б. осуществлено посредством промежуточйо-го включения ременной, зубчатой или червячной передачи, но при этом, вследствие лишних добавочн. потерь, коэффициент полезного действия привода несколько понижается. На фигуре 2 представлен в виде примера привод с промежуточной червячной передачей (червячное колесо н червяк закрыты кожухом).
Большое затруднение встречается при определении мощности мотора для Г. н. Такое определение возможно лишь опытным путем при помощи установки временного мотора к существующим приводам и записывания потребляемой мощности его или регистрирующим прибором или непрерывной записью показания приборов. Но это не всегда осуществимо. При проектировании новых установок для определения мощности мотора необходимо знать основные факторы, характеризующие работу машины, а именно: 1) коэфф. нагрузки, 2) коэфф. использования и 3) коэфф. одновременности. Коэффициент использования представляет собой величину, указывающую, насколько использована машина за время одного рабочего периода, где под рабочим периодом подразумевается рабочее время вместе с простоем за определенный промежуток времени. Если обозначим через Т продолжительность рабочего периода и через чистое рабочее время машины, то коэффициент использования можно выразить через
, ΣΙ рабочее время
И4~ Т рабочее время + простой
Папр., для ткацких станков /с„ колеблется от 0,57 до 0,02 (при 10-час. дне). Если обозначить через 1и 1г, 1п периоды време ни, в течение которых мощность станка соответственно равна LjjLj, L3,., Ln, то коэффициент нагрузки выразится формулой:
. -(L,l, + L,Ia +. 4· L„l„).
Lem обозначает максимальн. мощность станка. Коэффициент одновременности к„ представляет собою отношение количества одновременно работающих машин данной группы к общему числу машин. Для различного рода машин коэфф. одновременности весьма различен. Так, например:
Для и банкаброшей льняных. k0 s 0,91
» 17 очесочны ч.. 1<0
» 20 мокрых ватеров. 1<о=0.95
» (12 мотальных машин. «о=0,50
Мощность мотора, работающего на привод, будет равна
Lmoiu- кикн ko^j Lcm
полученную таким путем мощность мотора нужно увеличить на величину, соответствующую потерям па передачу.
Потерн мощности, затрачиваемые па работу трансмиссий при групповом приводе, зависят не только от передаваемой мощности, но и от других причин, как, например, от состояния трансмиссий, конструкции подшипников, смазки, диаметра валов, числа оборотов их и проч. Так, если для 13 ватеров нагрузка, в среднем, составляет около 110,5 ЬР, то на работу привода, считая потери в моторе и на работающие на холостых шкивах ремни, затрачивается - 23№. Считая потерю в моторе и на ремень от мотора на трансмиссию - 6,5 №. имеем потерю в трансмиссии - 16,5 №, что составляет около 19% передаваемом мощности к станкам. Таков расход на трансмиссию у машин с высоким коэффициентом одновременности; у машин же с низким коэффициентом одновременности этот расход больше; так, например, для мотовки, у которой коэффициент одновремеч1 пости около 0,5, расход на трансмиссию составляет 40—50% передаваемой мощности.
Преимущества Г. п. перед одиночным:
1) меныпая первоначальная затрата; 2) меньшая стоимость эксплуатации мотора; 3) мощность мотора меньше, чем сумма мощностей отдельных обслуживающих машин; 4) меньшее число ошибочных включений. Недостатки: 1) при работе одной или двух машин, во время праздничной или сверхурочной работы, работает вся трансмиссия, вследствие чего получается низкий общий кпд;
2) изнашивание ремня; 3) большие затраты на трансмиссию, передачу, подшипники, шкив и ремни; 4) загромождение мастерской ремнями между моторами и трансмиссиями и между трансмиссией и рабочими машинами, что увеличивает возможность несчастных случаев; 5) вследствие наличия большого числа ременных передач—худшие условия освещения (дневной свет заслоняется ремнями); 6) трудность ограждения приводных частей станка; 7) при порче мотора—остановка всего привода; 8) большие потери на холостой ход, обусловленные наличием трансмиссий и передач между мотором и рабочими машинами.
Вопрос о выборе того или другого типа привода для каждого случая должен решаться отдельно (смотрите Привод), но необходимо указать, что в последнее время одиночный привод получает широкое применение благодаря тем недостаткам Г. и., о которых было сказано выше. Кроме того, став ки по металлу, особенно токарные и сверлильные, требуют широкой регулировки скорости, что не м. б. осуществлено при Г. и. Наоборот, на нефтяных промыслах с введением глубоких насосов для добычи нефти Г. и. получает широкое распространение как у нас, так и за границей. При этом соединяют вместе от 6 до 20 насосов, которые посредством эксцентрика приводятся в движение от мотора. Для уменьшения потерь мощности на преодоление трения тяг от эксцентрика до насоса, тяги присоединяют к эксцентрику в диаметральных точках его, причем, когда плунжер одного насоса находится в верхнем положении, то плунжер другого насоса должен находиться в нижнем положении, чем достигается уравновешивание системы, и потери в передаче становятся незначительными.
Лит.: II и и е н Я. Асинхронные .моторы трехфаз-ного тока и области их применения, перевод с нем. М. 1925; Л у г о в с к о и Б. И., Электрификации Фабр.-зав. предприятии и ж.-д. мастерских. М. 1926: М e 1 1 е г К., Die Elektromotoren in ihrer Wirkungs-weise u. Anwendung. 2 Aufl. B., 1923: Steiner L., Tiefbohrwesen, FOrderverfahren u. Elektrotechnik in d. ErdOIindustrie, Berlin, 1926. M. Мартынов.