 > Техника, страница 41 > Дальномеры
> Техника, страница 41 > Дальномеры
Дальномеры
Дальномеры, приборы для определения расстояния между двумя данными точками без непосредственного его измерения и вычисления, причем предполагается, что Д. установлен в одной из них. Д. применяются при геодезических работах в качестве навигационных инструментов на морских судах и в военном деле. Д. могут быть разделены на следующие группы: акустические, i оптические, горизонтально- и вертикалыю-I базные с базой на местности (механические Д.) и микрометры.
Акустические Д. Действие акустич. Д. основано на применении законов акустики. Первым и наиболее простым представителем этой группы является дальномер системы ле-Буланже.
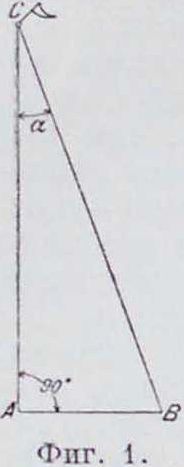
Оптические Д. Здесь задача определения расстояния сводится к решению прямоугольного тр-ка (фигура 1), одной из вершин которого служит удаленный предмет (цель) С, двумя же другими вершинами служат концы А и В базы Д. При этом считается, что база Д. всегда расположена перпендикулярно к направлению на цель, то есть угол А—всегда прямой; длина базы АВ между центрами объективов дальномера точно (до 0,1%) известна, и наблюдатель находится в точке А. При наличии этих условий искомое расстояние АС до цели м. б. всегда определено из прямоугольного тр-ка АБС, если известен один из острых углов. В целях достижения большей точности измеряется малый угол С=а при цели, т. и. пар алл акти-ческнй угол (а не угол В, близкий к 90°), и расстояние определяется по элементарной формуле:
Главной особенностью оптических дальномеров является способ измерения весьма малых углов с точностью, которая недостижима обычным механическим путем.
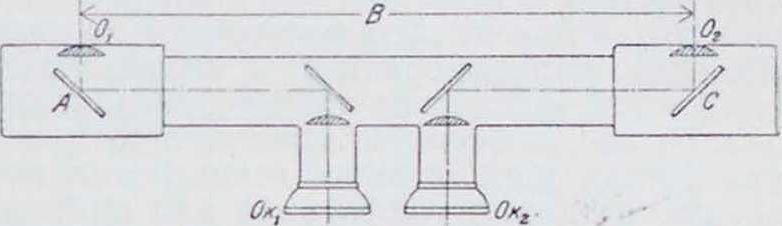
Проф. Барр и Струд первые разработали прибор, производящий измерение столь малых углов косвенным путем.Нредставим себе (фигура 2), что по концам АВ базы Д. установлены два зеркала аа и bb или две призмы с полным внутренним отражением, отражающие поверхности которых расположены точно под углом 45° к линии А В базы. Примем, по указанному выше, что рассматриваемый предмет С всегда расположен па одном (левом) из лучей, идущих к концам базы. Если же этот предмет бесконечно далек, то лучи СЛ и СгВ, идущие от него к концам базы, можно считать параллельными между собой и перпендикулярными к базе, почему и по отражении от концевых зеркал лучи эти пойдут вдоль базы А В. Встретив на своем пути вторую (центральную) систему зеркал аа и bb, соответственно параллельн. первым (по в которой зеркало а’а расположено ниже bb), лучи отразятся от них и пойдут так, что в окуляр Ок Д. верхняя и нижняя половины предмета будут видны лежащими в одной вертикальной плоскости и представляющими точное продолжение одна другой (фигура 2, D). Если после этого наблюдаемый предмет придвинулся из бесконечности к наблюдателю, то правый луч С2В окажется наклоненным на некоторый угол СхВСг=а к своему первоначальному направлению СгВ. Вследствие этого и отражение ВЬ этого луча от правого концевого зеркала В пойдет не вдоль базы А В, а несколько под углом к
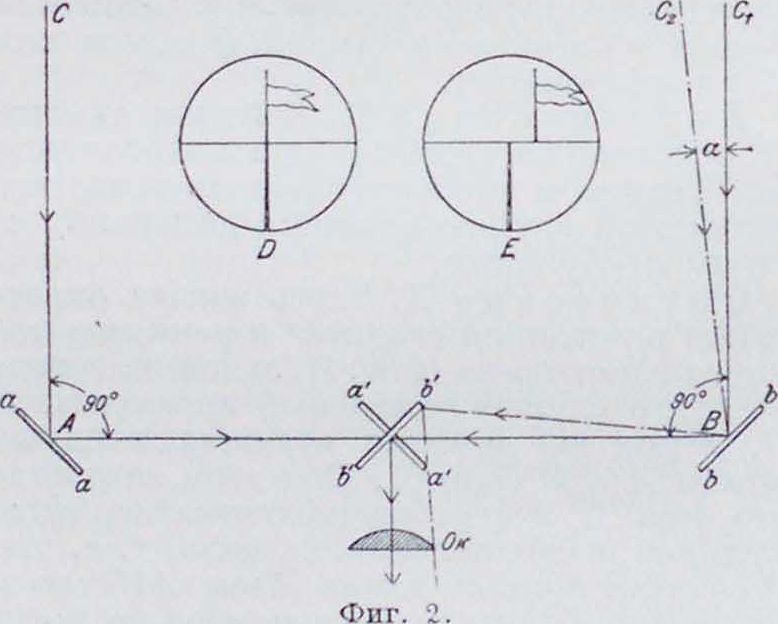
ней, вследствие чего и изображение в верхней половине поля зрения сдвинется относительно части предмета, видимой в нижней половине поля зрения, оставшейся неподвижной (фигура 2, Е). Поместим в Д. (фигура 3) на пути правого луча, после его отражения от концевого зеркала bb, объектив 02 и призму Р, преломляющую .луч к своему основанию вершиной к пели. Перемещая, в соответствии с расстояниями от цели, призму Р между двумя крайними ее положениями посредством микрометрического винта, вращаемого от измерительного валика Д., можно добиться такого положения призмы
Р, при котором правый преломленный луч упадет как раз на центр зеркала b Ь и, отразившись от пего и пройдя через окуляр Ок, окажется в одной вертикальной плоскости с лучами, идущими от левого отражающего зеркала А. Тогда наблюдатель получит впечатление целого наблюдаемого предмета (например, мачты), верхняя и нижняя половина которого будут точно совпадать.Таким обр., всякому расстоянию до цели С будет соответствовать свое определенное положение призмы Р; величина А передвижения призмы Р характеризует собой расстояние цели от Д., сама я^е дистанция отсчитывается по шкале, которая связана с призмой и движется мимо неподвижного индекса. Так как ход призмы
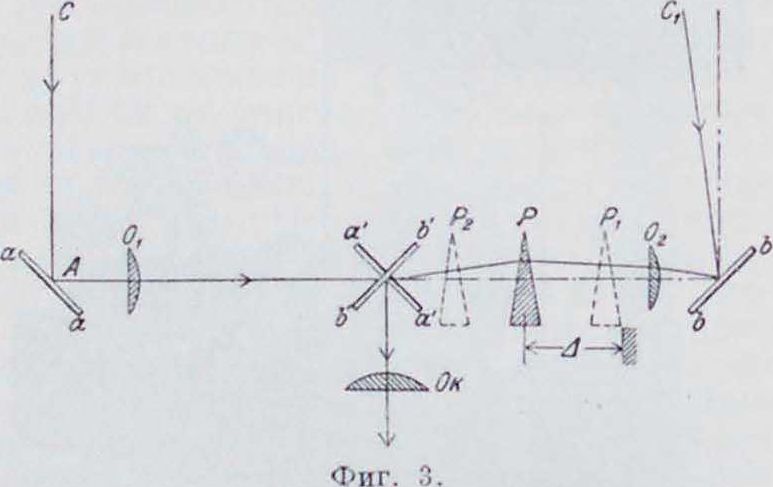
Р велик, то даже малое изменение парал-лактич. угла выражается сравнительно большим и точно измеримым передвижением отклоняющей призмы. Фирма Цейсс в своих Д. применяет для отклонения правого луча не линейное передвижение одной отклоняющей призмы, а вращение одной отклоняющ. призмы относительно другой. Оптическ. Д. делятся на два класса: монокулярные, основанные на зрении одним глазом, и бинокулярные (или стереоскопические) Д., основанные на особенности видения обоими глазами.
Монокулярный Д. состоит из наружного корпуса и внутреннего остова. Наружный корпус Д. имеет вид длинной (до 10 .и) трубы, расположенной горизонтально и вращающейся па штативе; он служит для защиты внутреннего остова; кроме того, на нем расположены окулярные части и валик, служащий для измерения расстояний. Внутренний остов заключает в себе всю важнейшую внутреннюю оптическую часть Д. и внутренний механизм его. Оптика монокулярного Д. была описана выше. Точность показаний Д. выражается следующей ф-лон:
Δ D=М,
где ΔΒ—ошибка в дистанции (в м), Ώ—дистанция (в м), В—величина базы Д. (в м), w—линейн. увеличение, Δ4—угловая ошибка сведения изображений, принимаемая равной 10". На практике величина М изменяется в зависимости главным образом от степени обученности дальномерщика и от условий наблюдений (освещения и видимости предмета, отсутствия дрожания слоев воздуха и прочие). При наилучших условиях М будет ок. 10", при плохих—20 ; 30", а в наиболее неблагоприятных случаях (туман, мгла и т. и.) молсет доходить до 40" (смотрите табл.).
Теоретические о шн Оки“ опти че с к их д
D’
и и ч и с л синие но ф-л е ДХ)=, ΛΛ, н р н нос
w В
Б и и о к у л я р п ы Й (стереоскопический) Д. для процесса измерения расстояния требует работы обоих глаз одновременно. Как известно, стереоскопичность зрения, позволяющая воспринимать глубину пространства, происходит, во-первых, от того, что изо-
а льда мер о в м, изображения оборачива-тоявиом W=10". ются И подводятся под окуляры Оку и Ок2, оси которых между собою параллельны н находятся на расстоянии глаз наблюдателя Ь друг от друга. Тогда, наир., при базе инструмента В=G,4 метров и увеличении в 28 раз,полная пластика Р прибора будет:
Р=28 6 4,00=2 800.
64
Вообразим, что в фокальных плоскостях трубок прибора помещены стереоскопии. снимки с ряда вех, находящихся на определенных расстояниях от наблюдателя. Смотря в прибор,увидим,что вехи как бы уходят вглубь пространства, и сможем оценить удаление точек обозреваемого ландшафта в зависимости от того, близ которой из вех они придутся. Такой бинокль был в начале 90-х годов прошлого столетия предложен Грузильером в Германии (Шарлоттенбург). Идея Гру-знльера была практически осуществлена
| Цлина базы и м | С | 5 | 4 | 3 | 2 | |||
| Линейное увеличение | 28 | 28 | 28 | 1Э | 28 | 23 | 28 | 19 |
| 1 000 | _ | _ | _ | 1,32 | ||||
| 2 000 | 1,2 | 1,4 | 1,7 | 2,6 | 2,3 | 2,8 | 3,5 | 5.26 |
| - 3 000 | 2,6 | 3,1 | 3.9 | 5,7 | 5,2 | 6,3 | 7,8 | 11,8 |
| - 4 000 | 4.6 | 5,5 | 6.9 | 10,2 | 9.2 | 11,2 | 13.9 | 21,1 |
| В 5 00U | 7,2 | 8,6 | 10.8 | 16 | 14.4 | 18.0 | 21,6 | 32,9 i |
| г 6 000 | 10,4 | 12,5 | 15,6 | 23 | 20,8 | 25,3 | 31.2 | 47,4 |
| " 7 000 | 14,1 | 17.0 | 21,2 | 31 | 28,3 | 34,5 | 42,4 | 64.5 |
| 8 000 | 10 | 22 | 28 | 41 | 37 | 45,0 | 56 | 84 |
| g а ооо | 23 | 28 | 35 | 52 | 47 | 57.0 | 70 | 107 |
| с 10 000 | 29 | 35 | 43 | 64 | 58 | 70.4 | 87 | 132 |
| Я 12 0О0 | 42 | 50 | 62 | 92 | 83 | 103 | 125 | — |
| - 3 и ооо | 57 | 68 | 85 | 125 | 113 | — | 170 | — |
| rt 15 000 | 65 | 78 | 98 | 145 | 130 | 158 | 195 | — |
| S 20 000 | 115 | 138 | 173 | 256 | 231 | 282 | 346 | — |
| = 30 ооо | 260 | 311 | 390 | 576 | 520 | 633 | 780 | |
| R 40 000 | 462 | 553 | — | 1 024 | — | — | — | |
| 50 000 | 720 | 865 | — | 1 600 | — | — | - 1 | |
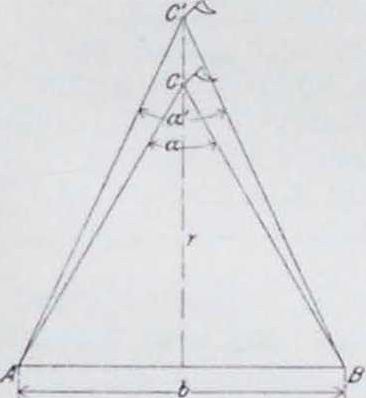
* Практически ошибки могут достигать значений в 3—4 раза больше указанных. брожения одного и того же предмета на ретине обоих глаз не тождественны; во-вторых, при изменении расстояния г (фигура 4) цели С от глаз А и В, меняется угол а между визирными линиями АС и ВС. Эти изменения инстинктивно отмечаются глазами и вызывают стереоскопичность видения. Однако, при очень малых углах а гла.чй теряют эту способность. Пределом а для хорошего дальномерщика можно считать 10". Расстояние Ь между глазами у различных лип, меняется в пределах от 58 до 72 миллиметров в среднем, 6=64 миллиметров. Расстояние г0, при к-ром глазной параллакс а равен 10", называется ради γι о м стереоскопического зрения:
Фигура 4.
Г„ =
6,4 t« ИГ
,=132 С00 см,
так как для расстояний, бблыпих г0, все предметы кажутся одинаково удаленными; однако, с увеличением базы В радиус этот увеличивается как отношение расстояния В между объективами прибора к расстоянию
b между глазами. Это отношение Р,= ^ называется удельной пластикой и р и-б о р а. При введении в прибор еще увеличения w, увеличиваются в w раз и предел глазного параллакса (10") и полная пластика прибора Р=w иь. Пусть АС (фигура 5) стереоскопии, труба, у которой объективы О, О 2 с параллельными осями находятся па расстоянии В друг от друга (В—база инструмента). При помощи комбинации из призм
р-М
Фигура 5.
фирмой Пейсс при участии проф. Аббе и Пульфриха, разработавших прототип современного стереодальномера. Теоретическая точность стереоскопического Д. совпадает с таковой монокулярных, ибо в формуле ошибки величины предельного глубинного и бокового параллаксов совпадают, достигая у хороших дальномерщиков, примерно, 10". Преимущество стереоскопия. Д. перед монокулярными несомненно: первые не требуют для наблюдения предметов с резко выраженными вертикальными контурами и, не искажая изображения предмета, позволяют лучше его наблюдать.
Г о р и з о н т а л ь и о б а з и ы е Д. с базой н а м е с т и о с т и основаны на механическом построении тр-ка но известной стороне— базе АС (фигура 6) и двум прилежащим к ней углам А и С, причем остальные две стороны А В и ВС и представляют собой в масштабе искомые расстояния от точек А и С до цели В. При этом углы А и С определяются с помощью угломеров, а величина базы, которая в целях точности выбирается возможно большей (несколько км), определяется для данного Д. раз навсегда геодезически база
Фигура 6.
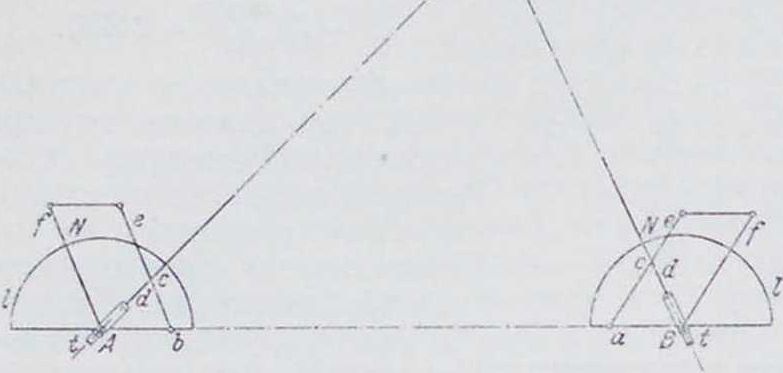
с большой точностью. Горизонталыюбазный береговой дальномер системы Лауница с телефонной передачей (фигура 7) состоит из двух одинаковых отдельных угломеров, устанавливаемых но концам А и В большой горизонтальной базы и соединяемых между собой телефонными линиями. Каждый угломер состоит из горизонтального лимба I, зрительной трубы ί, могущей вращаться вокруг
X
Фигура 7.
центра лимба (.4 и В), базисного бруска (ЛЬ и аВ) и трех линеек: дистанционной d, засекающей е и вспомогательной /. Базисный брусок ЛЬ и а В закрепляется неподвижно по нулевому диаметру лимба, справа или слева от его центра, в зависимости от расположения вспомогательного наблюдательного пункта В относительно главного А, от которого и определяют расстояние до цели. Линейки, дальиомерная d и вспомогательная/, могут вращаться вокруг центра лимба (Л и В), засекающая же линейка е (соединенная всегда параллельно вспомогательной) вращается вокруг той точки (b или а) базисного бруска, которая изображает на нем точку стояния второго угломера. Расстояния определяются по способу засечек, причем направление визирного луча со вспомогательного пункта В (выраженное в делениях угломера) передается по телефону на главный прибор h, после чего на нем строится тр-к ЛсЬ, подобный тр-ку АСВ на местности, и расстояние АС до цели отсчитывается по шкале дистанционной линейки d в месте ее пересечения засекающей е. При стрельбе по движущейся цели нужно знать расстояние не для момента дальномерного определения, а последующего падения снарядов. Исправление направления зрительных труб производится автоматически посредством так называемых упредительных механизмов. Горизонтальные Д. с большой базой отличаются по сравнению с оптическими большей точностью, но обладают некоторыми недостатками, главными из которых являются длительность и ненадежность передачи но телефону. 13о избежание этого недостатка, телефонная передача установки засекаюшей линейки вспомогательн. угломера на главный замененаэлектромеханическ. передачей, при которой засекающая линейка главного прибора движется синхронно с визирной трубкой бокового наблюдателя (франпузск. система Ривальса; итальянская—Браччиалини; рус
ская—Петрушевского и де-Шарьера). Наибольшая дистанция, определяемая горизои-тальнобазпым Д. с достаточной для боевых целей точностью, равна приблизительно учетверенной длине базы.
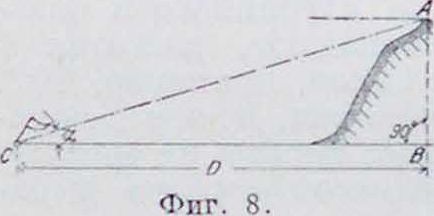
В е р т и к а л ь н о б а з и ы е Д. с б а з о и на местности. Определение дистанции сводится к решению прямоугольного тр-ка АВС на местности (фигура 8) по известным катету А В (высота стояния Д.) и углу а при цели, по формуле П—АВ ctg а. Высота стояния Д. над уровнем моря определяется геодезически и является т. о. постоянной. При наличии сильных приливов и отливов, резко изменяющих высоту стояния Д., последняя все время указывается особым прибором и при пользовании Д. устанавливается соответственно данному моменту. Величина угла а представляет собой наклон визира относительно горизонтальной линии. Для автоматизации решения визирная труба движется по криволинейным направляющим, причем угол наклона a, a следовательно, и дистанция, определяются непосредственно по положению трубы и отсчитываются на шкале, нанесенной на направляющих. Прибор дает хорошие, в смысле точности, показания при
,с
Фигура 9.
большой высоте базы. Наличие сильных приливов и отливов, особенно при малой высоте стояния Д., равно как и колебания рефракции, значительно уменьшают точность показаний. Величина наибольшей дальности в км, измеряемой с достаточной для боевых целей точностью, равняется высоте базы, выражаемой в .я, деленной па 4.
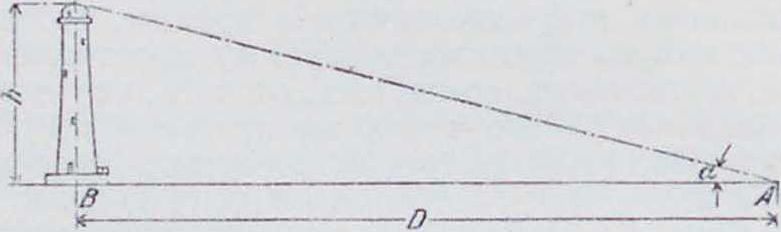
Микрометры, тип Д., которые собственно измеряют только угол а, под которым видна база (параллактич. угол), величина же самого расстояния получается из прямоугольного тр-ка ДВО (фигура9) по формуле: D — h ctg α
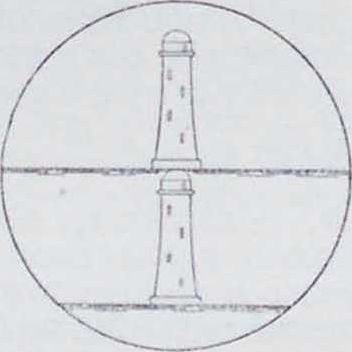
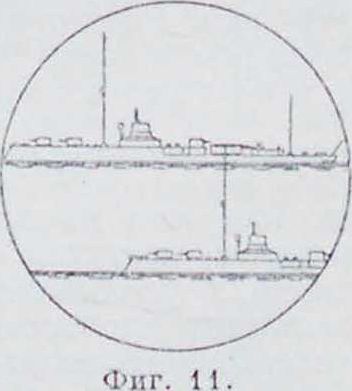
при известной высоте h вертикальной базы цели. Микрометр представляет собой обыкновенную зрительную трубу, объектив которой распилен по вертикали пополам; обе половины его. могут двигаться по вертикали независимо одна от другой, давая каждая свое изображение цели. Процесс измерения состоит в следующем. Сначала на особом шкале с надписью «высота цели» устанавливают высоту цели. Затем, наведя прибор на цель, вращают измерительный винт до тех пор, пока оба изображения цели, передвигаясь по вертикали, не станут точно одно над другим, касаясь друг друга, как показано на фигуре 10. Подобным совмещением измеряется параллактич. угол a, a самое расстояние читается па соответственной шкале. Таково устройство микрометров системы Люжаля, Мякншева, Фюсса. В микрометре системы Крылова возможно еще и боковое смещение изображений. Это обстоятельство важно с точки зрения подбора и возможности совмещения наиболее резко видимых точек изображения, например, вершин мачт со срезом башен (фигура 11), что неосуществимо в микрометрах других систем.
.Ium.: Лемтюж никои Д. С., Дальномеры. Теория и устройство, .1. 1928; отчет Кронштадтской крепостной артиллерии об испытании оптнч. дальномеров. СПБ, 1912; Золотухин С. X. Дальномеры Барра н Струда. СПБ. 11(03; Гу ранда И. В.,
( тереоскопич. приборы, II., 191 4; Длусский А.II. Оптика и дальномеры. И. 1914; Описание дальномера Барра и Струда типа F. О·, СПБ. 1912; Soerz, Tiddmetre i base pour petites distances. “Revue d’opti-que thioritique et instrumentale>, P., 192H. 3. p. 13 7— 13 0; ΤέΙέηιέΠβ stirioscopique avec altimitre et tachy-niitie, ibid. 1929. ;; Nouveau t616m6tre suisse, «Ztschr. f. Instrumentenkunde», В., 192a, p. 54 6. С. Агафонов.