 > Техника, страница 43 > Динамомашина
> Техника, страница 43 > Динамомашина
Динамомашина
Динамомашина постоян. тока имеет назначением, работая в качестве генератора, преобразовывать механич. энергию в электрическую. Генератор постоянного тока, в отличие от генератора переменного тока (смотрите), служит для образования электрического тока, текущего постоянно в одном и том же направлении (вместо «постоянный» ток иногда говорят «прямой»), Д., работая в качестве двигателя, служит для преобразования электрическ. энергии в механическую.
22·
Генератор н двигатель постоянного тока—· машины обратимые: работая в качестве генератора, Д. стремится превратиться в двигатель, развивая момент вращения, противодействующий направлению движения соединенного с ней механич. двигателя (паровая машина, дизель и проч.); работая лее в качестве электродвигателя, она стремится одновременно работать в качестве генератора, развивая в цепи якоря напряжение в направлении, противоположном текущему в нем току. Преобразование механич. энергии в электрическую и обратно происходит в якоре машины, в то время как другие части имеют назначением обеспечить эту деятельность якоря. Постоянный ток можно получить двумя методами: 1) путем равномерного вращения проводаводнородном (гомогенном) магнитном поле, вокруг одного из полюсов магнита; 2) путем вращения витка в магнитном поле, образуемом двумя магнитами, с последующим выпрямлением полученного таким образом переменного тока в постоянный при помощи коллектора.
Униполярная машина.
Машины, образующие постоянный ток по первому способу, называются у н и п о л я р-ными, или гомополярными. Принцип действия их покоится на известном опыте Фарадея (фигура 1): провод ЛИ, укрепленный на контактных кольцах, вращаясь вокруг одного из полюсов магнита, пересекает магнитный поток постоянно в одном и
том же направлении, вследствие чего в проводе индуктируется постоянная эдс, и во внешнюю цепь передается постоянный ток при помощи неподвижных щеток Си I), скользящих по контактным кольцам S, и.$». Несмотря на чрезвычайную простоту униполярной машины и большой интерес "к "ней со стороны изобретателей, практич. применение (сравнительно ограниченное) получила лишь униполярная машина системы Е. Нег-герата, строившаяся General Electric С°.
При равномерном движении провода, длиною I см, со скоростью v с.н/ск, в потоке магнитной индукции В, в проводе наводится электродвижущая сила (в V) е=В I · v · 10~8.
Магнитная индукция и окружная скорость практически ограничены определенными предельными величинами: в литой стали В, примерно, 16 000 гаусс и v в стальных роторах от 120 до 150 м/ск. Длина провода 1, соответствующая ширине полюса, в свою очередь, ограничена размерами машины. С увеличением ширины полюса I приходится увеличивать диаметр D ротора, для того чтобы пропустить через него магнитный поток Ф. Так как
Ф=-f- В=л D В,
4 2
то ширина машины и активная длина прово да f=? ; при длине провода в 20 сантиметров уже подходим к максимальным диаметрам ротора, допускаемым при 3 000 об/м. При параллельном включении проводов между двумя контактными кольцами эдс достигла бы при сохранении вышеуказанных предельных величин всего 100—120 V. Пеггерат соединил про-водапоследовательно через контактные кольца, щетки и неподвижные провода, проходящие через полюс индуктора (фигура 2). В виду больших окружных скоростей стальных контактных колец проблема снятия тока весьма сложна. Медные щетки изнашиваются в течение 24 ч. работы на 12—75 миллиметров, что заставило ввести в них прослойки из стальных пластин. GEC выполнен ряд униполярных
Фигура 2.
машин как для электролитич. целей с малым напряжением (6V) и большой силой тока (8 00U А), так и для электрич. центральных станций, мощностью до 2 000 kW и напряжением от 200 до 600 V при 900 об/мин. Униполярная машина допускает значительные мгновенные перегрузки (до 200%), хорошо держит напряжение и имеет такой же кпд, как и коллекторная машина постоянного тока (фигура 3), так как повышенные мс-ханическ. потерн от ттрения компенси- №руются минималь- юными электричес- 4о кими. Униполярная го машина обратима и может работать как двигатель.
Несмотря на частичный успех машины Неггерата, следует, однако, признать, что проблема создания дешевой, надежной и требующей малого ухода униполярной машины еще не разрешена.*
| It | ——— | |||||
| ~V | ||||||
75
150 225 ЗОО 375 -ϊ» Ш Фигура 3.
Коллекторная машина.
Последовательное соединение проводов без посредства колец внутри якоря, так чтобы наводящиеся в них эдс складывались, возможно лишь в изменяющем свою силу магнитном потоке. Получаемый переменный ток, изменяющийся по закону синуса, выпрямляется. по предложению Г1ачииотти(186() г.) и Грамма (1870 г.), путем замены контактных
* Следует, однако, предостеречь от желания по-строить униполярную машину с обмоткой без скользящих контактов. Это принципиально невозможно в такой же мерс, как и построение вечного двигателя.
Фиг. колец коллектором (фигура 4), к каждой пластинке которого присоединена секция замкнутой на себя обмотки. Эдс секций, находящихся л сфере влияния каждого из полюсов, суммируются. Щетки, снимающие ток с двух параллельных ветвей обмотки, лежат в нейтральной зоне. Секции в момент перехода из сферы влияния одного полюса в сферу другого замыкаются щетками накоротко. Машины постоянного тока,построенные по указанному прин-д ципу, в противопо ложность униполярным машинам, получили возможность развития вследствие того, что один из трех факторов В, I, V, влияющих на величину эдс, а именно f, может быть изменяем в достаточно широких пределах.
I. Современная коллекторная Д. постоянного тока состоит из следующих основных комплектных частей: 1) станины—индуктора с главными и дополнительными полюсами, концы обмоток которых выведены к зажимной доске сбоку станины; 2) двух п о д ш и и н и к о в ы х щитов, переднего— со стороны коллектора и заднего—со стороны вентилятора. В более мощных машинах подшипниковые щиты заменяются подшипниковыми стойками, укрепляемыми на общей со стан иной фундаментной плите; 3) якоря;
4) коллектора со вложенной в его пазы обмоткой; 5) вентилятора, засасывающего воздух со стороны коллектора и выпускающего его через отверстия в заднем подшипниковом щите, для отвода тепла, образующегося в железе якоря и обмотках якоря и магнитов (для лучшего охлаждения якоря штампованное листовое железо его собирается—шихтуется — в несколько пакетов,так чтобы между ними оставались свободные вентиляционные каналы, засасывающие воздух через осевые каналы внутри якоря и коллектора); 6) щ е-точной рамы (звезда щеткодержателя) с укреплен. на ней изолированными от рамы стержнями, на которых сидят щеткодержатели со щетками. Стержни одного знака соединяются собирательными кольцами, от которых идут гибкие провода к зажимам (борнам) машины.
Якорная обмотка. Различаются открытые и замкнутые на себя обмотки. От-крытая о б м о т к а распадается на отдельные элементы, соединяющиеся последовательно в группы при помощи щеток. Сек-
Фвг. 5.
Фиг. цми обмотки под северным и южным полюсами магнитов (фигура 5) одними концами соединены между собой, другими—с полукольцами коллектора. Эдс, наводимая в обеих секциях за время их прохождения иод полюсами, сохраняет одинаковое направление. При вступлении секций в сферу влияния полюсов противоположной полярности каждое из полуколец коллектора вступает в контакт с другой щеткой, вследствие чего направление эдс во внешней цепи остается без изменения. Величина эдс меняется от нуля до максимума, то есть является пульсирующей. Открытыми обмотками пользовались в своих машинах Сименс,Томсон-Гаустон, Бреш (Brush) и Вестингауз. В настоящее время они применяются довольно редко. Замкнутая обмотка (фигура 0), наоборот, получила широкое распространение, особенно барабанная (намотанная на цилиндр). С целью уменьшения воздушного зазора между якорем и полюсными наконечниками применяются, по предложению Венштрема (1882 г.), якори с пазами. Группы обмоток, составленные из секций в замкнутой обмотке, остаются при всяком положении якоря параллельно соединенными между собой. В так называемой последовательной, или волновой, обмотке—две параллельные ветви, в параллельной же, или петлевой,—число параллельных ветвей равно числу полюсов. В каждой из этих систем обмоток число параллельных ветвей может быть в несколько раз увеличено (многократные обмотки).
Замкнутые якорные обмотки м. б. подразделены на следующие три основные группы:
1) спиральная обмотка, 2) п е т л е в а я,
3) волновая. Обычно элемент обмотки состоит из одной секции, но он может быть также образован из нескольких секций. В симметричной обмотке все элементы вполне одинаковы и равномерно расположены по окружности якоря.
В якоре с многослойной обмоткой (более двух) расположение секций не вполнеравномерно.
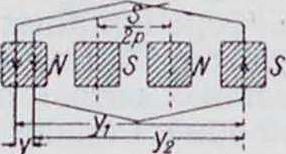
Число секций всегда совпадает с числом коллекторных пластин К. Однако, м. б. случаи, когда число пластин увеличивается против числа секций в несколько раз. Результирующий шаг обмоток у состоит из отдельных частичных шагов ?/, у2, Уз и т. д. В спиральной обмотке эдс наводится только на одной стороне секции, в петлевой и волновой обмотках—на обеих. Обозначив через S общее число индуктируемых сторон и через и—число индуктируемых сторон одного элемента обмотки, получим S=K и. В кольцевой обмотке и — 1, в барабанной обычно и=2, однако, их м. б. и больше. Результирующий шаг для обыкновенной волновой обмотки (фигура 7) будет У=Ух + Уг, для петлевой (фигура В) у-=ух-уз, а при числе сторон и
У=Ух±Уз±Уз± •±Уи·
За единицу смещения т элемента обмотки
в магнитном потоке примем коллекторный шаг ук. Тогда в спиральной и петлевой обмотках будем иметь (фигура 9):
™=Ук= ‘ · У
и в волновой
Ук- р ±™>
где р—число пар полюсов. В первом случае т всегда целое число, а во втором—м. б. и дробным. Обозначив через а число пар параллельных ветвей, молено сделать вывод, что смешение т каждого элемента обмотки в магнитном потоке, помноженное на количество полюсов (2р), будет равняться числу
параллельных ветвей (2о), то есть т 2р=2а, или т=“. Обозначим через то блюкайшее целое число полюсных делений, к-рое содер-жится в шаге у (фигура 10), и назовем шагом обмотки в магнитном поле. Для спиральной и петлевой обмоток равно 0, для волновой равно целому четному числу. Количество
коллекторных пластин, приходящихся па один полюс, равняется Коллекторный
шаг ук=„К ± т. Подставив m=“, полу-
Δρ Р
чаем обобщенную формулу
)К ± 2а
2р
0)
выведенную Арнольдом, которая может служить для построения обмотки любого типа.
Принимая во внимание, что К= и и ук-и=у,
ф-ла Арнольда для частичных шагов обмотки м. б. написана в виде:
У - Ух + У% ±У»± ··· ±Уи= — S2lp2aU · (2)
Если имеется многократная замкнутая обмотка, то есть д независимых друг от друга замыкающихся на себя обмоток, то формула (1) примет вид:
?/*·! =
/К а 2ад
2 р
Из этой ф-лы можно сделать тот вывод, что
1) количество многократных обмоток соответствует общему наибольшему делителю уки К, 2) обмотка—простая, то есть замыкается только один раз в том случае, если ук и К не имеют общего делителя. Применяя ф-лу
=
У=У, - У,=т, k,
yk~>-2t±m
= 4 U=4
У=У1 + Уг + Уа + У1
, и.
yk-f-2p±m
Уз^
= 4 и-2
У=У1+У. Ук=>2р±т
Фигура to.
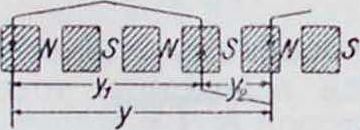
Арнольда к различным системам барабанных обмоток, получим: 1) для петлевой обмотки, где /=0, а=р, и= 2, K=S, и ук=± 1:
У=Ух ~ Vi - ± 2.
Т. к. частич. шаг (t/j и у2) приблизительно равен полюсному делению ,S, молено написать:
ΔΡ
Ух-
S *Z Ь
2р где Ь означает число, превращающее ;i/, и угв целые и нечетные числа. В многократной петлевой обмотке будем иметь:
Ук-±т, у=Ух~ уг — ± 2т,
S -ι ь Ух ~ а/> >
У г
2) для волновой обмотки, где f=2, α= 1, 2, получим: κ±ι ν, + ν,.
Ук =
р
У=Ух + Уг -
S±2
2 - « “ р при чем Ух и у.—числа нечетные и К и ук не имеют общего делителя. 3) Для последовательно-параллельной обмотки (Арнольда), состоящей из нескольких параллельно соединенных волновых обмоток, где f= 2, а>1.
К =
получаем: к±а р
Ук-
II, + !/.
2
У-Ух + Уг - S ]2а ·
Эквипотенциальные (р а в н о πο-τ е н ц и а л ь н ы е) со е д и н е н и я. При условии соблюдения всех правил, удовлетворяющих симметричности обмоток якоря, как
К 2 р то: а=целому числу,=целому числу, ζ
а=целому числу (Ζ—число пазов якоря),
возможно было бы ожидать при петлевой обмотке равенства потенциалов однозначных щеток. Однако, вследствие часто встречающейся на практике неоднородности материала, эксцентрического положения якоря, неодинакового сопротивления отдельных секций обмотки (там, где приходится мотать вручную или применять пайку), симметрия нарушается, и поэтому в параллельных ветвях обмотки наводятся различные эдс, вызывающие появление выравнивающих токов. Щетки в таких случаях, в зависимости от силы выравнивающих токов, начинают искрить. Эквипотенциальные соединения имеют целью разгрузить щетки якоря от действия выравнивающих токов и направить эти токи по другому пути. Внутри обмотки якоря имеются точки одинакового потенциала, которые, будучи между собой соединены проводами, пропускают через них выравнивающие токи и способствуют равномерному распределению тока между параллельными ветвями обмотки якоря. Благодаря большой самоиндукции обмотки якоря, переменные токи, текущие по эквипотенциальным соединениям, отстают по фазе, примерно, на 90° от вызывающих их эдс и стремятся, с одпой стороны, усилить магнитный поток магнитов с ослабленным полем, а с другой—уменьшить поток магнитов с усиленным полем. Если, например, в витке edef (фигура 11) появится выравнивающий ток, образуемый секциями /с, то он потечет под другим одноименным полюсом в направлении de, то есть обратно, вследствие чего и действие его будет направлено к ослаблению магнитного потока полюса над секциями fc и к усилению над секциями de. Потери от нагревания обмотки при эквипотенциальных соединениях не только не устраняются, но, наоборот, увеличиваются, в соответствии с силой выравнивающих токов. Вследствие этого при обмотке с эквипотенциальными соединениями необходимо обращать особенное внимание па изготовление вполне идентичных секций. В волновых обмотках несимметричность поля не вызывает появления внутренних токов в якорной обмотке. Применение эквипотенциальных соединений при волновой обмотке ташке дает положительные результаты в двух отношениях: во-первых, они дают равномерное распределение токов между различными группами щеток и, во-вторых, представляют дополнительным токам коротких замыканий параллельный со щетками путь, вследствие чего щетки разгружаются. Обозначим через цр потенциальный шаг, то есть число пластин коллектора, лежащих между ближайшими пластинами с одинаков, потенциалом. Тогда к
Ур=р, т. к. точки одинакового потенциала лежат под одноименными полюсами. При тяжелых условиях коммутации выполняют по одному эквипотенциальному соединению
V
па один паз, и получается а соединений. В машинах с легкими условиями коммутации
7 7
число соединении делают равным 0а или ,]а.
Эдс обмотки якоря. Согласно закону индукции, мгновенное значение эдс с наводимой секцией обмотки, соответствует изменению магнитного потока άΦ в единицу времени dt и выражается ф-лой
В течение промежутка времени t, —12 сред-
Фигура 11.
нее значение наводимой эдс будет равняться ц — i а
φ,-φ,
(i-l. ’
где Ф, и Ф2—значения магнитного потока, протекающего через виток в момент времени ίι — ί2· Если периодич. изменение магнитного т потока секции в течение полупериода - про исходит в пределах от Фтах до Фшп, то среднее значение наводимой эдс Еср равно:
T _г тщг — фт!п ср. “ J
Так как обычно Фтах=— Ф,н£п=Ф, то Е=4 Ф
СП. ^ т
Введя в формулу вместо Ф магнитный поток Ф,г, проходящий через каждый из числа w последовательно соединенных витков, и вместо
i,
Т —число периодов /, получим:
Еср.=4 /и:Ф,„.
Число периодов f находится в зависимости от количества пар полюсов р и числа η оборотов якоря в минуту. Между ними существует соотношение:
Введя это соотношение в формулу, получим:
j-, _ 4 ηνν>Φ,Γ
αορ· 60
Число витков, последовательно соединенных по всей окружности якоря, м. б. выражено через число проводов г обмотки якоря и через число 2а параллельных ветвей в виде:
w =
Следовательно, эдс обмотки якоря:
Е=г · р · η Ф,
а где Ф—величина потока, исходящего из одного полюса. Выражая магнитный поток Ф в максвеллах, получим эдс (bV):
Е =

η
60
• Ф · ΙΟ-8.
Эдс, наводимая в обмотке якоря постоянного тока, колеблется в весьма небольших пределах и практически м. б. принята за постоянную величину, если обмотка якоря подразделена на большое количество секций, присоединенных к соответственно большому количеству пластин коллектора.
Момент вращения. Исходя из закона сохранения энергии, можно сделать вывод, что та часть механической мощности, которая в генераторе непосредственно превращается в электрическую энергию, может быть выражена в виде:
Ν =
2 л η · М 60
где η число оборотов в минуту и М—момент вращения, действующий на якорь генератора, или в виде:
Ν=Е · I,
где Е—эдс, наводимая в обмотке якоря во время нагрузки, и 1—сила тока. Б двигателях получаем обратное явление. Из обоих ур-ий получим момент вращения
:,р i ф.
2яп 2 па
Если выразить Е в вольтах, I—в амперах и число об/м. обозначить через п, получим: М=0,974 L 1 кгм =
7 71
= 0,0090 Еп 1 стэнметров=0,96 J.
II. Магнитная цепь. В каждой Д. магнитная цепь составляется из магнитных полюсов, ярма, междужелезного пространства и железа якоря. При возбужденных магнитах и при отсутствии тока в обмотке якоря каждому числу ампервитков соответствует определенный магнитный поток Ф„, проходящий через якорь. Откладывая на оси абсцисс ампервитки возбуждения и на оси ординат
соответствующие величины магнитного потока, получим кривую намагничивания машины. При постоянном числе оборотов Д. каждой величине потока соответствует определенная эдс, наводимая в обмотке якоря, то есть между эдс и величиной магнитного потока существует определенная пропорциональность, позволяющая откладывать на оси ординат также эдс. Расчет кривой намагничивания базируется на следующем законе магнитной цени, выражающем зависимость между электрич. и магнитными величинами:
0,4л · г w=J II dl,
гдеII—напряженность магнитного поля, di -элемент длины магнита.потока,г—сила тока в амперах и w—число витков возбуждения. Магнитная цепь разбивается на составные
Фигура 13.
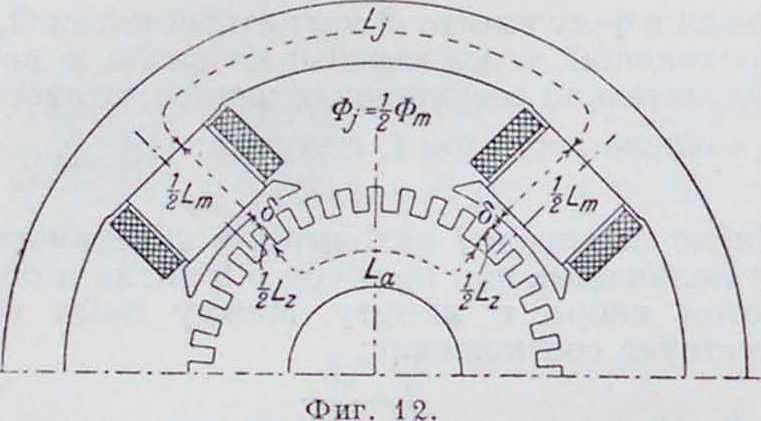
части, и для каждой из них определяется количество ампервитков, потребное для возбуждения этой части магнитного потока. Т. о., общее число ампервитков A W на катушках электромагнитов (фигура 12) суммируется из ампервитков, затрачиваемых" на приведение магнитного потока через ярмо (AWj), полюсные сердечники (/I,Wm), воздушный зазор (-4VP,), зубцы (Л1Р.) и железо якоря (AWa). На основании закона магнитной индукции можно написать следующее ур-ие:
AW=0,8/Я dl=0,8 IIjLj + 0,8 HmLm + .,
где Lj, Lm,. представляют собой длины средних путей магнитных линий для ярма, полюсных сердечников и т. д. Вводя вместо 0,8 11 j, 0,8 Ыт и т.д. количество ампервитков на 1 сантиметров длины (а?е), последнее равенство можем написать следующим образом:
AW=aWj Lj + awm Lm -f awt 2<5 +
+ aw. Lz + awa La.
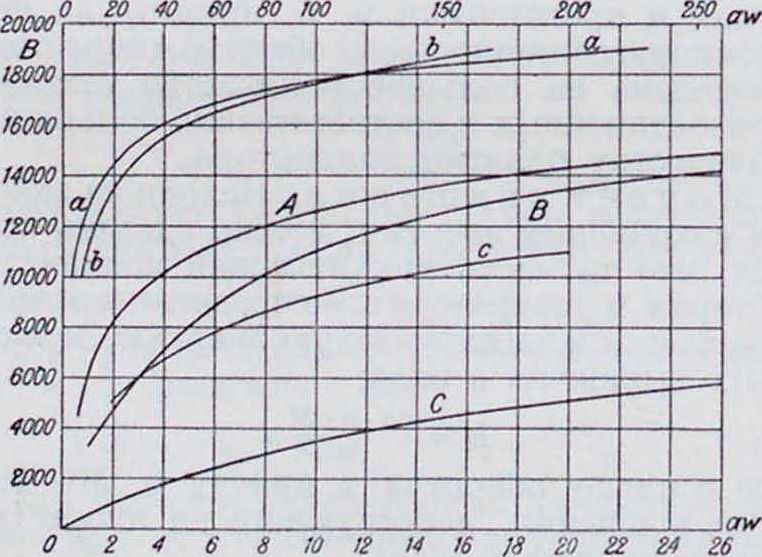
Па основании кривых намагничения, определяемых опытным путем для каждого сорта применяемого ферро-магнитного вещества (фигура 13: кривые А,а—якорное железо, 11, Ь—стальное литье, С,с—чугун) и дающих зависимость между магнитной индукцией (В) и потребным количеством ампервитков (uv), рассчитывается aw для каждой части магнитной цепи и определяется общее количество A W. нужное для проведения магнитного потока
Ф= 00 · Е · 10s.
р · П · Ζ
Не весь магнитный поток, образуемый электромагнитами, поступает в якорь; довольно большая часть его проходит непосредственно через воздух от одного полюса к другому. Эта часть носит название м а г-нитного рассеяния, или потока уточки (Фч). Отношение потока, образуемого электромагнитами (Ф,„), к проходящему через якорь (Ф„) называется к о э ф ф и ц и сито м р а с с е я н и я а, то есть
фт фа + фх = 1 j. фя фа <"я ’
Поток утечки поддается довольно точному расчету. Арнольд разбивает поток утечки па шесть частей и выводит для них следующие соотношения, исходя из положения, что поток, проходящий сквозь элементарную трубку, равен магнитодвижущей силе Р,„, помноженной на ее проводимость А, то есть Ф — Рт λ.
1) Поток утечки между внутренними поверхностями полюсных наконечников
Ф,=Р
1 х 7
<blp 0.8С, ’
где Р,„—разность магнитных потенциалов.
2) Поток утечки между внешними поверхностями полюсных наконечников
-Jϋ,
0.8 Cm
где Fjj—площадь внешней поверхности полюсного наконечника, a Lm=L3+nS.
3) Поток уточки между внутренними поверхностями полюсных сердечников
Ф _ р. Jh. α«0η.
3 h,„ 0,8L,
4) Поток утечки между внешними поверхностями полюсных сердечников где
hfdq-a, hm 0,8 Cm
L,„=/j2 +
5) Поток утечки между внутренними поверхностями полюсных сердечников и ярмом 1,п. у h>‘,.
n,sii», Ал L,
G) Поток утечки между внешними поверхностями полюсных сердечников и ярмом da hi
фс Г
л 5 м I)
Ф«=Р”
4
0,8л hm
Общий поток утечки получим, удвоив первые пять потоков и прибавив шестой, то есть
Ф. — 2Р,
г°
1 I 0.S
s 1р HLs
-i- lj r 0,8(L,+ nS)
i h, a,/»
+ hm
+
+
h.dgd,
0,8 h,
0,8 L,
lm "Ν1 a,h, dq - hj "|
0,8hm АЛ L, ‘ 1,6-ihmJ
Отсюда получим общую проводимость менаду поверхностями полюсных наконечников:
Σ; = _аАр fp
Р 0,8/, ^ 0.8(/., + nS) ’
между поверхностями полюснух сердечников у r2 _ h’ a,l’!l J__dffl.
Ал т ϋ,8/ι„. I
)
между ярмом и полюсами
Σ Γ; = 1 (, У α>Ίι. dQhJ
XAi 0,b/l», Vm Ал Ll Г 2л
Подставив значение Ф„ в ур-ие, выражающее коэфф. рассеяния <т, получим:
2 (AWi + AW. + AW„)
σ= 1 +
2 ·ΓΛ» + 2
(Σν
Для приближенного определения коэфф-та рассеяния можно пользоваться эмпирнч.формулами. Гобарт и Эллис предложили для определения потока утечки Ф8 при круглых полюсах формулу:
Ф„=С *
AW,
МП!
Ф,= С· ’Г
и для прямоугольных:
/I (/,„ + 15)
/-,
где /г—высота полюса, включая высоту наконечника, Λ M,—число ампервитков на 1 полюс, С—эмпирическ.коэфф., колеблющийся, если размеры выражены в см, от 2,5 до 3,5. Шенфер предложилдля тогоже расчетаф-лу: ф8=(С т + Сг1) AWi или, если AWj неизвестно,
σ=1+6 (с: + тонн) ’
где г—полюсное деление, <5—междужелезиое пространство, I—длина железных пакетов якоря, С, С2, С; и Ci—эмпирические коэффициенты, которые м. б. приняты в среднем: Сх=1,54-1,8; Сг=0,7Ч-1,2; Ci=44-5; С;==24-3. Для наиболее распространенного типа многоиолюсных Д. с круглой станиной коэффициент рассеяния а колеблется от 1,3 для малых машин до 1,1—для крупных. В станинах с добавочн. полюсами коэфф. рассеяния больше на 5—7%. Зная коэфф. рассеяния а, можно вычислить число ампервитков для ярма и магнитов. Магнитная индукция в ярме и сердечниках магнитов будет:
о-Ф „ а - Ф
13J - 2Qj ” 13m ~ Q,η ’
где Qj и Q,„—площади сечений ярма и сердеч ника. Беря из кривой намагничения соответствующие aw на 1 сантиметров длины, получим:
AW j=aWj Lj и AWm=awm Lm.
Количество ампервитков для воздушного зазора (AWt) при гладком якоре получается по формуле:
AW[= 0,8 · 2<5 · В}.
В воздушном зазоре зубчатых якорей над зубцами образуются сгущения силовых линий, вследствие чего магнитная индукция у вершин зубцов (Втах) превосходит Bh Обозначив через к1 отношение этих величин, получим:
1-__Втах
kl Βι
Для зубчатого якоря можно написать: ^W(=l,6<5 · ку В[=1,6 <5 ·,
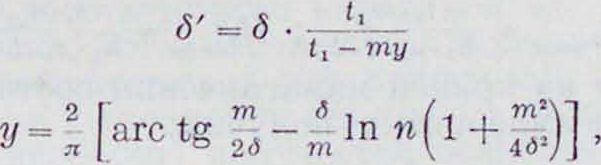
где δ—д-ку — расчетная величина воздушного зазора. Величину (5 можно вычислить по ф-лам Кутта:
где i,—деление зубцов у вершин, m—ширина зубца. Средняя магнитная индукция В воздушного зазора определяется из формулы:
где Ь и I,· обозначают приведенные расчетные ширину и длину полюсного наконечника. Определение величины bi производится
Фигура 14.
Фигура 15.
следующим способом: вычерчивается вероятное расположение силовых линий в между-железном пространстве, причем в части полюсной дуги b (фигура 14), между скошенными краями наконечника, силовые линии могут считаться параллельными отрезками, равными воздушному зазору <5. Трубки, выходя щие из скошенных краев, имеют другие средние длину δχ и ширину Ьх. Приведенная расчетная ширина полюса может быть вычислена из уравнения:
b-b + 26 2Ь*.
Переходя к магнитному потоку вдоль оси якоря (фигура 15), заметим, что вследствие вентиляционных каналов поток распределится неравномерно, и приведенная расчетная длина (!,·) полюсного наконечника будет больше длины I активного железа. Приближенно можно принять где I является длиной активного железа якоря, 1р—длина полюсного наконечника.
При вычислении ампервитков зубцов различают два случая: магнитная индукция в зубцах 000 и Вг > 18 000. Пренебре гая в первом случае частью магнитного потока, проходящего через паз, и предполагая, что весь поток проходит через железо зубца, получим магнитную индукцию В, для какого-либо сечения зубца шириной г с зубцовым делением ί из выражения
В -___,
* I.,.“. *
ь-
где. ’—число зубцов под полюсной дугой, ч
I,—зубцовое деление на окружности якоря, /с,—фактор, учитывающий толщину изоляции между листами динамного железа, равный 0,884-0,92. Принимая последнюю формулу, найдем максимальную и минимальную магнитные индукции:
и-Фа. т, 1. Фа
bi
В,
В,
max кг- z,· I Ь; ’ г min kt Zt · l ·
Беря из кривой намагничения собтветству-ющие ампервитки, получим:
AWz=^Lz(awz
+ ОМЬ. ). wax 6 пип
Во втором случае, при Бг>18 000, приходится учитывать то обстоятельство, что часть магнитного потока проходит через пространство паза. В противном случае получаются слишком большие индукции В, и берутся преувеличен, значения ампервитков. Пар-шаль и Гобарт предложили разделить индукцию для каждого сечения зубца на теорети-
нию на основании последней ф-лы, для того чтобы к определенной величине теоретической индукции Bsi подыскать действительную ΒΖΙΓ. На фигуре 1G даны Арнольдом пять кривых для различных величин /с3, показывающих соотношение между Д.,· и Вш и дающих возможность для каждой величины Bzi получить соответствующие ампервитки из кривой aw=f(B.,r).
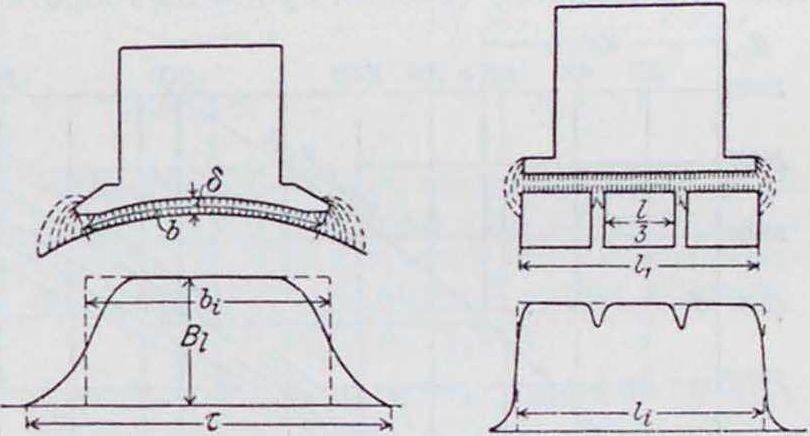
Указанные кривые соответствуют динамной стали высокой магнитной проницаемости. Более точно можно определить A W, разделив высоту зубца на несколько частей и определив для каждого сечения теоретич. магнитную индукцию и соответствующие ампервитки. Построив кривую зависимости между высотой зубца и а w2(фигура 17), получим площадь:
0*5 Lz
S=0,8 J Я ell=* L. ага. о и
AW.=L, aw,.
Т. к. кривая по своей форме приближается к параболе, то, определив аи у основания, вершины и середины зубца, можно получить A Wz, пользуясь теоремой Симпсона:
AWt=Я,
Фигура 17.
&ZW
15000
24000
23000
22000
2/000
20000
/3000
78000
16000.L
- aw —
200 400 Ш
е 800 /ООО
1.500
2000
2500
| А | ф | Й5 | № | У | ||||||||||
| <з | Г | У ~7 | ||||||||||||
| А | ||||||||||||||
| с | А | & | ||||||||||||
| р | ||||||||||||||
| _1 | w | |||||||||||||
| [L | ||||||||||||||
| L | - | |||||||||||||
| я | ||||||||||||||
16000
20000
22000 24000
Фигура 16.
26000
вескую (В,·) и действительную (В2,г). Теоретическая индукция соответствует прохождению полного потока через сечение зубца. Можно написать ур-ие:
В,п В,: —— к, Н,„,
I ht, 1 где А-з=— ь. ^ — 1 (Ji-
-длина железа якоря
1 к, ζ
с вентиляционными клапанами, I—без вентиляционных клапанов), 11,Г — напряжен-ность магнитного поля в пазу. Соотношение между В.,г и II,„ лучше всего м. б. выражено в виде диаграммы, которая поддается построе
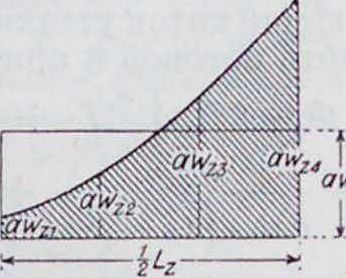
III. Реакция якоря. При прохождении тока через обмотку якоря ампервитки якоря оказывают на магнитную зооо цепь динамомашины маг-нетизирующее воздействие, называемое реакцией якоря. Когда щетки расположены в нейтральной зоне и ток течет только в обмотке якоря, его ампервитки образуют так называемый поперечный магнитный поток (фигура 18), силовые линии С которого замыкаются, проходя через междужелезное пространство и полюсы. Обозначим через Вх магнитную индукцию якорного поля на расстоянии х от средней линии полюса. Пренебрегая магнитным сопротивлением железа полюса и якоря, можем написать:
2х AS=1,6(5#“,
где AS—линейная нагрузка якоря, равная числу ампервитков обмотки якоря, приходящемуся на те. сантиметров длины окружности якоря. Отсюда:
Вх=2х AS=х Const,
х 1,64
то есть равномерно распределенный по окружности якоря ток образует в междужелезном пространстве поле, изменяющееся по закону прямой линии (фигура 18). По т. к. индуктор состоит из отдельных полюсов, то кривая
28000
30000 В,
распределения магнитной индукции сохраняет характер прямой линии непосредственно под полюсами, и то лишь в том случае, если полюсные наконечники и зубцы якоря не слишком насыщены. В между полюсном
Фигура is.
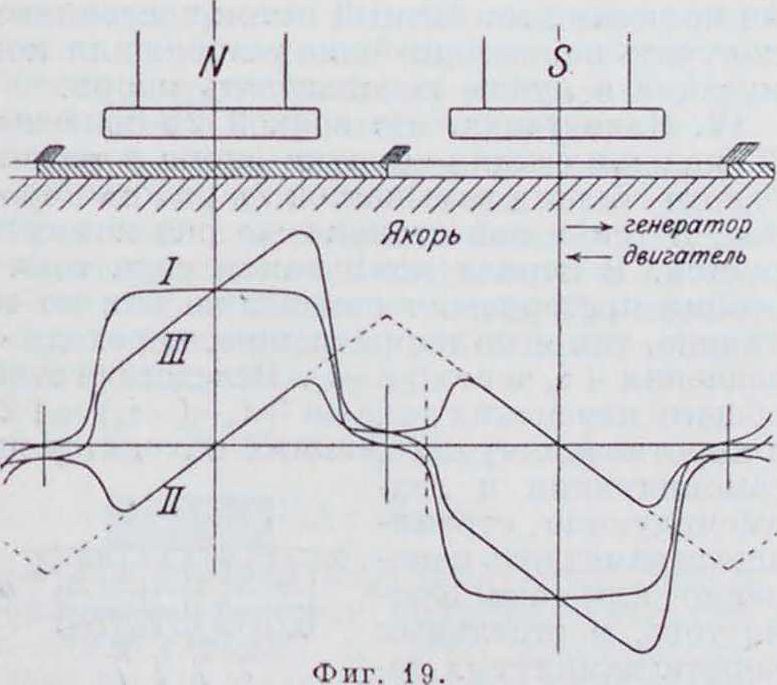
пространстве кривая магнитной индукции принимает седлообразную форму. Складывая равномерный магнитный поток I, образуемый полюсами (фигура 19), с потоком якоря II, получим результирующий магнитный поток III. Как видно из фигура 19, искажение магнитного поля возбуждения выражается в сгущении потока у одной части полюсного наконечника и разрежении у другой части его, а также в смещении нейтрали на некоторый угол. Площадь результирующего потока III (если пренебречь магнитн. сопротивлением железа якоря и полюсн. наконечника) равна площади кривой I. Чем больше смещаются щетки относительно геометрия. нейтрали, тем более ослабляется магнитный ноток возбуждения. Максимум ослабления достигается при сдвиге щеток до средней линии полюсов. Благодаря сдвигу щеток из
нейтрали часть обмотки якоря,соответствующая двойному углу сдвига(2/1), образует продольное магнитное поле, ось которого совпадает с осью магнитов возбуждения. С целью уменьшения искрения щетки приходится смещать так, чтобы продольные амнервитки действовали на иоле возбуждения размагничивающим образом. Рассматривая двухпо-ι люснуго машину (фигура 20) и обозначив через 2 b (в см) часть окружности якоря, соответствующую двойному углу (2/3) сдвига щеток, получим продольные ампервитки якоря A W,
AW,=2b AS - Ц0 π D AS.
Чтобы компенсировать размагничивающее действие продольных ампервитков, необходимо соответственно увеличить возбуждение. Другая часть обмотки якоря, образованная поясами токов 1—3 и 2—4, создает поперечное магнитное поле, ось которого перпендикулярна к оси полюсов. Чтобы выяснить влияние поперечного поля, можно поступить след, обр.: на кривой намагничения (фигура 21) данной машины отложим среднюю магнитную индукцию в воздушном зазоре:
где Фа соответствует наводимой эдс Е при нагрузке. Тогда магнитной индукции Bt будут соответствовать ампервитки ОР. У генераторов у входной части полюса (у двигателей—наоборот) получается ослабление ам-иервитков возбуждения на величину b,AS,
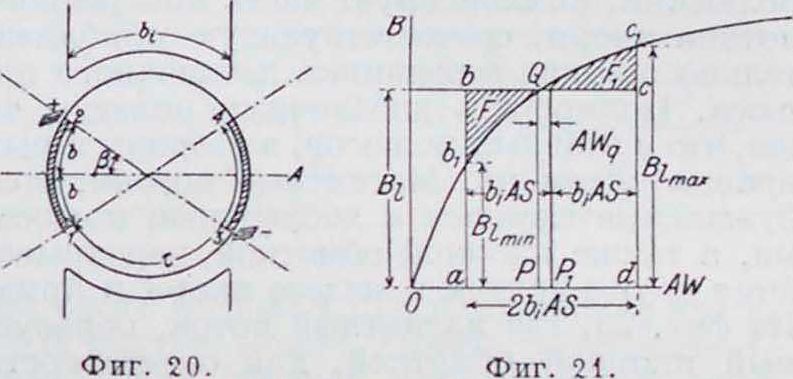
а у выходной—такое же усиление. Т. к. площадь прямоугольника abed пропорциональна bjBf, то она является также величиной, определяющей магнитный поток полюса:
Фв-“,·&,· В,.
Для того чтобы магнитн. поток не претерпевал изменения, необходимо, чтобы площадь прямоугольника была равна площади ab^c^d, то есть, чтобы площади F, и F были равны. Откладывая величину 2 brAS на ординате таким образом, чтобы выполнить вышеуказанное условие, получим величину ампервитков AWq —РР1, на которую надо увеличить возбуждение, чтобы удержать Ф„ на постоянной высоте. Из диаграммы получаем также Bt. и Bt В части поверхности якоря 1—2 и 3—4 поперечное магнитное поле усиливается за счет ампервитков:
2(т —2Ь) AS.
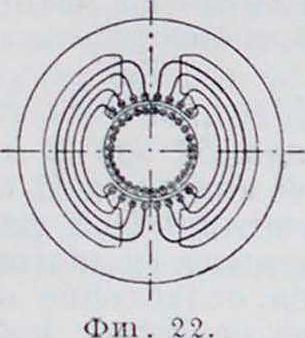
Это усиление магнитного поля, по мере увеличения нагрузки, вызывает дальнейшее смещение нейтральной зоны. В интересах лучшего использования якоря и достижения наименьшего напряжения между коллекторными пластинами стремятся сохранить под главными полюсами постоянное и равномерное магнитное поле. Это отчасти достигается применением компенсирующей обмотки, которая закладывается в пазы полюсных наконечников (фигура 22).
Магнитное действие компенсирую-щ е и о б м о т к и равно и прямо противоположно магнитодвижущей силе обмотки якоря. Принимая во внимание рассеяние магнитного потока, образуемого компенсационной обмоткой, линейную нагрузку ASkкомпенсационной обмотки обычно берут несколько высшей против нагрузки якорной, хотя это и ведет к нек-рому ослаблению магнитного потока возбуждения. Путем применения добавочных полюсов, вместо компенсационной обмотки,также можно достичь хорошего коммутирующего поля. Добавочные полюсы располагаются по нейтральной линии и снабжаются обмоткой, соединенной последовательно с обмоткой якоря (фигура 23). Магнитный поток, образуемый добавочными
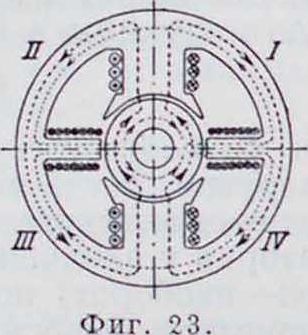
полюсами, компенсирует часть поперечного потока якоря, соответствующую приблизительно ширине сердечника добавочного полюса. Полярность добавочных полюсов та же, что у главных полюсов, в сторону которых вращается якорь. Магнитные потоки, возбуждаемые главным и добавочным полюсами, а также якорной обмоткой, перекрываются друг с другом в железе якоря и ярма. Из фигура 23, где магнитный поток, образуемый якорной обмоткой, для отчетливости чертежа не обозначен, видно ослабление потока в ярмах и якоре в I и III квадрантах и усиление во II и IV.
Обозначив через — и поток добавочного и главного полюсов в якорном железе, которым соответствует средняя магнитная индукция якоря В,, получим результирующую магнитную индукцию в 1 и III квадрантах:
р_ Ф- ф„ пФ 15 а и во II и IV:
Точно также в ярмах получим результирующую индукцию в I, III и II, IV квадрантах:
η фк - фгк J Фк
Фк- ^к в,
Фк i
где Фк и Ф,гк—магнитные потоки у вершины вспомогательного и главного полюсов. Обозначим через 11 и 11" напряженности магнитного поля, взятые из кривой намагничения, соответствующие индукциям B’ и В", и через L—среднюю длину пути потока в якоре или ярме. Добавочное магнитное напряжение (Vr), вызывающее прохоисдсние потока добавочных полюсов вякоре и ярме,может быть выражено формулой:
В главных полюсах влияние потока добавоч ных полюсов отражается на магнитной характеристике. Добавочное магнитное напряжение главных полюсов Vи могкет быть при нагрузке выражено формулой
В общем, в машинах с дополнительными полюсами при нагрузке происходит падение напряжения вследствие наложения магнитного потока добавочных полюсов. Для покрытия указанного падения напряжения магнитное напряжение в главных полюсах должен быть усилено, согласно выводу Рихтера, на величину
(Уна ~ Va + (УHi ~ !) Vj> где Vjj=11 J " ; II—напряженность магнитного поля при средней индукции В, равной в +Β-, V — магнитное напряжение в цепи главных полюсов (индексы а и j указывают на якорь и ярмо). Так как магнитная характеристика вспомогательных полюсов должна нтти по прямой линии, то магнитные насыщения для якоря и ярма принимают достаточно малыми (примерно, Βζ 10 000 гаусс для динамной стали и 8 000 для чугуна), а падение напряжения в большинстве случаев ничтожно, и им можно пренебречь.
С экономии, точки зрения, машина с добавочными полюсами выгоднее машины с компенсационной обмоткой; с точки зрения технической, они могут считаться равноценными. В случаях особенно затруднительной коммутации, например, в турбинных генераторах, двигателях с ударной нагрузкой, быстроходных машинах и тому подобное., применяется компенсационная обмотка совместно с дополнительными полюсами. В этом случае Л S* —rlS и, кроме того, между AS и AWk(числом ампервитков для воздушного зазора и зубцов под серединой дополнительного полюса) при всяких изменениях нагрузки сохраняется пропорциональность. При таких условиях возможно поддержать под главными полюсами магнитный поток постоянным, получить наивыгоднейшие условия для коммутации и лучше использовать якорь.
IV. Коммутация. Во всякой 2р-полюсной Д. каждая секция обмотки якоря в течение одного оборота замыкается 2р раз на короткое, и ток в ней столько же раз коммутируется. В период коммутации сила тока в секции претерпевает изменения как но величине, так и по направлению, переходя от значения +г„ через 0 к -г„. Вследствие этого общего изменения тока на +га—(—га)=+2гав короткозамкнутых секциях находятся эдс самоиндукции и взаимоиндукции, стремящиеся замедлить изменение силы тока. Кроме того, в отдельных короткозамкнутых секциях вследствие их движения в магнитном поле находятся эдс е, е2, е3 и т. д. (фигура 24). Пренебрегая омич, сопротивлением катушек, можно для четырех короткозамкнутых секций вывести следующее дифференциальное ур-ие, выражающее мгновенные значения по
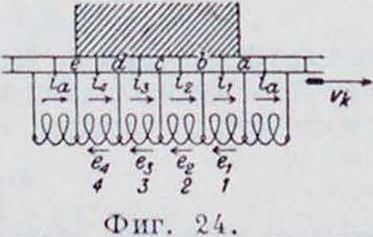
тенциалов (Р) между щеткой и коллекторными пластинками а, Ь, с,., в результате наводимых эдс ек, е2, е3, е4, эдс самоиндукции L и взаимоиндукции Lx ^·Τ;:
| *1 | I | ц | di, ч til i_ | Ln | di, dt | L31 | di, di + | Ltl | di 4 dt | + |
| + Σ | LX1 | dir
~df ~ |
p· | ~Ρχ | ; | |||||
| е2 | + | ц | * Έ + | k22 | di, dt + | Lj2 | di, dt "Τ | Z>42 | di, dt | + |
| + У
1 j—, |
Ρχ2 | dix
dt |
p, | -Рг | J | |||||
| е“ | + | L | di,
» ./i |
L 23 | dt r | Li3 | di,
dt T" |
dii
dt |
+ | |
| + Σ | Lxa | dix~dt = | p, | -p3 | “, | |||||
| е“ | + | L | *4’ + | b24 | dt,
dt |
L3i | di3,
di |
Lu | di,
dt |
+ |
| + Σ | Lxt | d>x dt ~ | Pb | -p, |
Обозначив через М(ек), М(е.2),. средние значения наводимых эдс, через Μ(Ρχ), Μ(Р,)— средние значения разности потенциалов между коллектором и щеткой в период Т приближения коллектора на одно деление β, можно из вышеуказанных дифференциальных уравнений с известным приближением вывести:
М (с,) - ψ (Lm + Lm) - М (Р2) - Μ (Р^,
M (e,) - ψ (Lm + L‘m)=M(P3) - M(P2),
M (c3) - 2;" (Lm + Lm)=M (P4) - M (P3),
изложения получаем следующие уравнения: M (е4) - er=Μ (Ρ2) - Μ (ρ]),
Μ (e2) — er= Μ(Ρ3) — Μ(Ρ2),
§ Τ* £ [Μ(е) — ег]=Μ(Pf) - Μ (Ρ,).
Наиболее выгодные условия коммутации получаются, если все значения М(Р) равны между собой. Это возможно только при постоянстве коммутирующего магнитного поля, что практически недостижимо без применения дополнительных полюсов и компенсационной обмотки. Коммутация в естественном поле наиболее выгодна в том случае, если средние потенциалы на сбегающем и набегающем краях щетки равны между собой, или, что то же, если реактивная эдс ег равна средней коммутирующей М(с), к-рую в дальнейшем будем обозначать через ск, то есть
er= ек=у? (Lm + -k«) ·
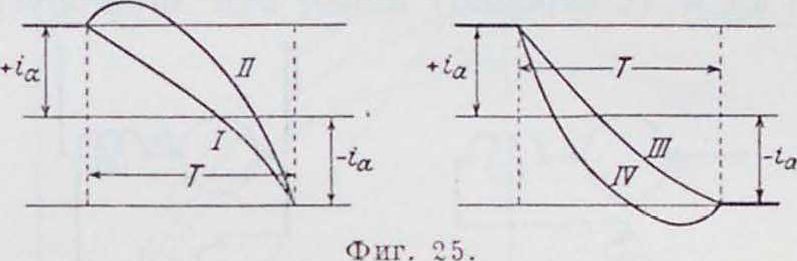
Если коммутирующая эдс ек < ег,то преобладающее действие самоиндукции выразится в замедлении коммутирования. При значительном перевесе е,. над ек, ток г, вместо того чтобы уменьшиться под действием ек. начинает увеличиваться (фигура 25, I и 11). При ек>ег темп уменьшения тока ускоряется.
где Lm представляет собой среднее значение коэфф-та самоиндукции Lu. L,2. Ll3, Lu. L.it. L34, a L,„—среднее значение коэффициентов взаимной индукции секций, замкнутых на короткое последующей щеткой обратного диска.
Значения M(Pj), М(Рг),. м. б. определены экспериментальным путем. Они лежат на потенциальной кривой коллектора. Так, Μ(Ρι) представляет собой среднее значение разности потенциалов между главной и вспомогательной (узкой) щеткой, лежащей у сбегающего края главной щетки; М(Рг) представляет среднюю разность потенциалов между главной и вспомогательной щеткой, отстоящей от сбегающего края главной на одно деление, и т. д. Обозначив через М(Рг) средние значения разности потенциалов между главной щеткой и коллектором на набегающем крае щетки и через Тк—период короткого замыкания одной секции, можно написать следующее ур-ие:
*-Tk-;‘o[M(e)--f(Lm + L)]^
-М(Р,)-М(Р,),
где S—число всех индуктируемых сторон секций якоря, и—число индуктируемых сторон одной секции и М(е) представляет среднее значение эдс, наводимой в одной секции в период короткого замыкания от движения секции в магнитном поле.
er=f(Lm + L;„)
носит название реактивной электродвижущей силы. Как вывод из предыдущего
При очень большом преобладании ек над етток в секции может достичь значения — гаранее конца периода коммутации и даже возрасти до больших значений (фигура 25, 111 и IV). Для расчета эффективной реактивной эдс es рядом авторов были предложены следующие формулы, являющиеся развитием основной формулы для е,.:
е,-0,в-£ χ-h-v-AS-
(Арнольд), где/?—коллекторное деление, bг— ширина щетки, приведенная к простой параллельной обмотке, +h+К · у“: К—
удельная проводимость паза, >.к—удельная проводимость вершин зубцов, А3н ls—удельная проводимость и длина торцевых соединений секций, i,—тсоретнч. длина якоря;
AS (?.V + >.L). 10-°
(Фишер - Гиннен), где bк—ширина щетки,
7.q—удельная проводимость поля якоря в коммутирующей зоне;
V10-·
(Пихельмайер-Сенстиус), где
А*=К + К + 0,5 Я3 у ·
То же значение для коммутации, как и реактивная эдс, имеет среднее максимальное напряжение (Р) между соседними коллекторными пластинками. Обычно с Р„ют не идут дальше 25—30 V и соответственно Рср. редко выше 15—20 V. Чем больше Р,ии Р,.;)., тем меньше должно быть выбрано е3, и наоборот.
V. Способы возбуждения, характеристики и применения Д. постоянного тока.
1) Д. с независимым возбуждением получают возбуждающий ток от совершенно независимого источника с постоянным напряжением UE (фигура 2G). Сила тока 1т возбуждения не зависит от напряжения U на борнах динамомашины и регулируется изменением сопротивления г, введенного в цепь обмотки возбуждения. Добавочные полюсы и компенсационная обмотка, если они имеются, включаются последовательно с обмоткой якоря. Сила тока внешней цепи 1 равна якорному току 1п.
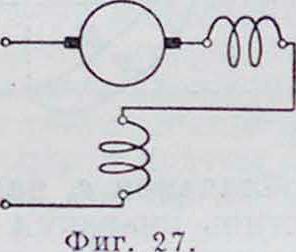
2) Д. с последовательным возбуждением (Series) имеют якорь, соединенный последовательно с обмоткой полюсов (фигура 27).
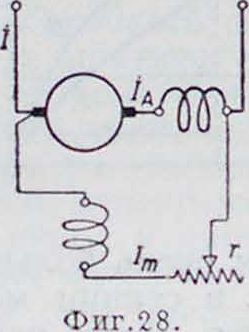
3) В Д. с параллельным возбуждение м (Shunt) обмотка магнитов включена параллельно якорной обмотке (фигура 28).
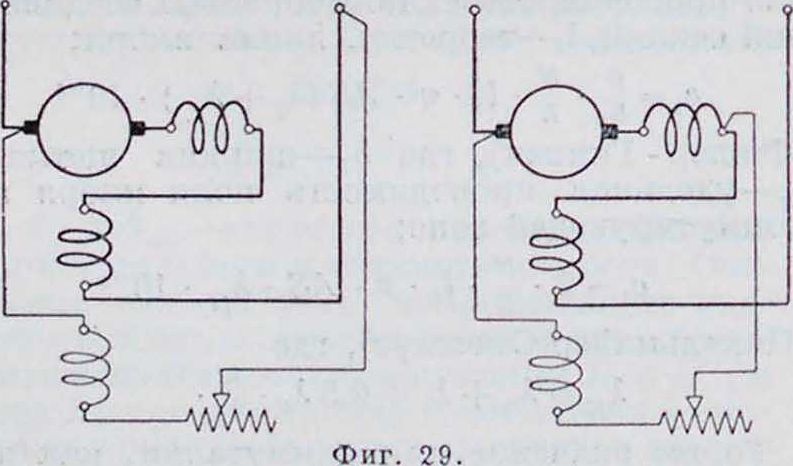
4) Д. со смешанным возбужде-н и е м (Compound) имеют как шунтовую
обмотку возбуждения, так и последовательную (фигура 29). Шунтовая обмотка м. б. присоединена либо к зажимам Д., либо к зажимам якорной обмотки. Обмотки дополнительных полюсов и компенсационная, если они имеются, включаются последовательно в цепь якоря.
Различают следующие виды характеристик: 1) Характеристика холостого хода генераторов—выражает зависимость между напряжением V на борнах машины и ампервитками магнитов AWm или силой тока 1т возбуждения при силе тока во
- и-*-о
Фигура 26.
внешней цепи 7=0 и постоянном числе оборотов п. Характеристика холостого хода двигателей дает соотношение между эдс Е0якоря и силой тока 1т возбуждения, при моменте вращения равном Const и постоянном числе оборотов п. 2) Нагрузочная характеристика генераторов выражает связь между напряжением U на борнах и силой тока 1„, возбуждения при J=Const и n=Const. Нагрузочная характеристика двигателей дает соотношение между числом оборотов п и силой тока 1т возбуждения при U=Const, Z?A.=ConstH М =Const. 3) В и е ш-н я я характеристика генераторов показывает зависимость напряжения U на борнах от силы тока I во внешней цепи машины при η=Const и силе тока возбуждения 7m=Const. Внешняя, или с к о р о с τη а я, характеристика двигателей представляет зависимость числа оборотов двигателя от внешнего момента вращения М или силы тока в якоре 1а, при U=Const и 7Ш=Const.
4) Регулировочная характеристи-к а генераторов дает соотношение между 1т и силой тока во внешней цепи I при t=Const и w=Const. В двигателях эта характеристика показывает зависимость, при тех же постоянных величинах, силы тока возбуждения 1т от момента вращения М или силы тока в якоре 1а.
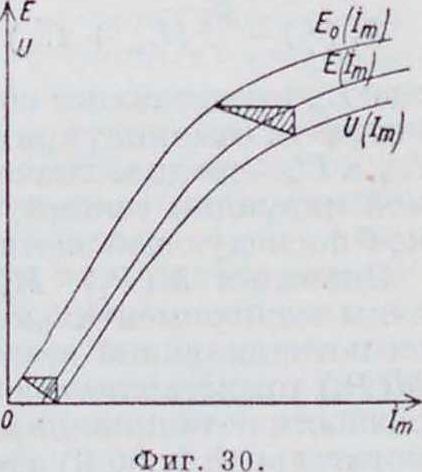
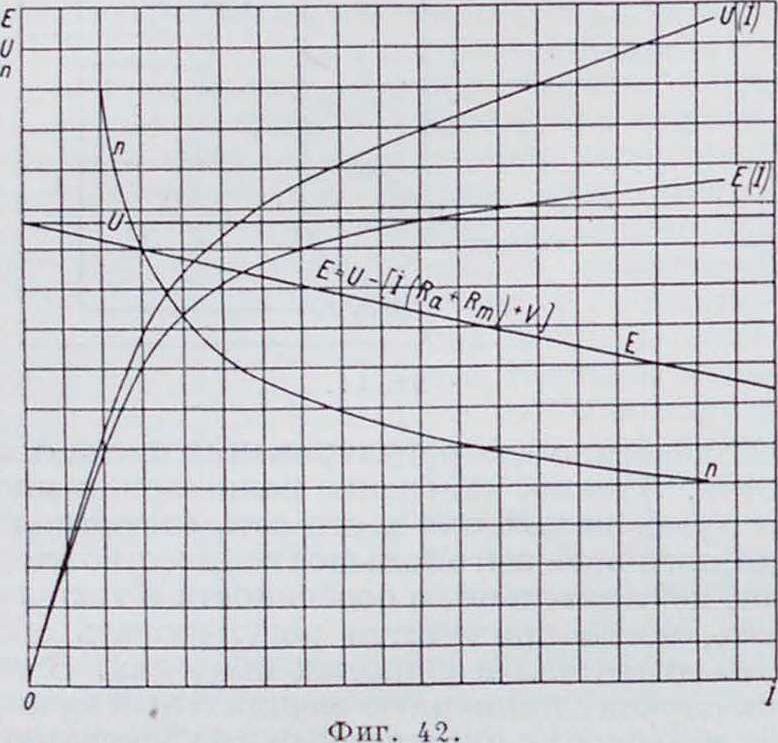
X а р а к те р и ст и к и и п р и мене н и я Д. как генераторов пост. тока. 1) Характеристика холостого хода Д. с н е-зависимым возбуждением идентична с кривой намагничения в том случае, если щетки находятся в нейтральной зоне и обмотка не выполнена с укороченным шагом. При сдвиге щеток из нейтральной зоны на угол β, отсчитываемый по окружности якоря, так чтобы продольные ампервитки А якорной обмотки были прямо противоположны ампер-виткам Л W„ индуктора, из характеристики холостого хода генератора£0(7„,)
(фигура 30) можно построить его внутреннюю нагрузочную характеристику Е(1т), сдвигая кривую Е0(1т) параллельно абсциссе на величину
AWl 4- AW„
»
W.n
где wm—число витков обмотки пары магнитных полюсов. Из внутренней нагрузочной характеристики Е(1т), при постоянном якорном токе 1„-=1, получается внешняя нагрузочная характеристика U(Im) путем сдвига точек кривой Е(1,„) параллельно оси ординат на омическ. потерю напряжения в цепи якоря. Последняя складывается из потери напряжения в обмотке якоря R1 и напряжения V переходного сопротивления щеток, т.о. омическая потеря напряжения равна III -f V. Заштрихованный тр-к носит название ха-рактеристич. тр-ка. Изменение нагрузки генератора вызывает изменение напряжения U вследствие изменения падения напряжения в обмотке якоря и в контактах щеток RI+V и вследствие изменения влияния реакции якоря. Внешняя характеристика U(l) и внутренняя характеристика генератора
E(I) с независимым возбуждением (фигура 31) показывают постепенное падение эдс Е и еще большее падение напряжения на борнах U в зависимости от увеличения I. Внутренняя характеристика Е(1) получается из внешней путем прибавления к ординатам кривой £7(1) вели-
и м __________ чины падения на
-.лт пряжения в якоре
СЛ и щетках RI+ V.
0(i} Разница между напряжением на борнах при холостом ходе и наводимой
αί·1—- эдс Е происходит
1 --f* от потери напряже-
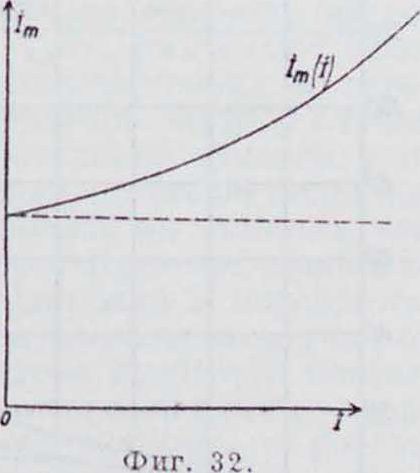
фигура 31. ния вследствие ре акции якоря. Для того чтобы поддерживать напряжение U постоянным при разных нагрузках, необходимо по мере увеличения нагрузки генератора увеличивать силу тока возбуждения 1,п путем уменьшения сопротивления г в цепи обмотки возбуждения. Из кривых Щ1т), построенных для различных сил тока I, можно получить при U=Const и п=Const соответств. токи возбуждения 1т (фигура 32). .)то и будет регулировочная характеристика 1т(Г) генератора, имеющая значение для определения ступеней сопротивления регулирующего реостата.
Генераторы с независимым возбуждением могут без затруднения работать параллельно на линию с постоянным напряжением при условии сохранения постоянства числа оборотов якоря. Распределение нагрузки на параллельно работающие генераторы производится путем регулирования тока возбуждения. Эдс Е генератора, отдающего в линию ток 1, уменьшается на величину падения напряжения от омич, сопротивления R обмотки якоря и напряжения V переходного сопротивления щеток. Напряжение на борнах U генератора с независимым возбуждением выражается ф-лой:
U=Е - (R1 + V).
Независимое возбуждение применяется в генераторах, у которых магнитная система, полюса и ярмо изготовляются из динамной стали (листовой), не имеющей остаточного магнетизма, вследствие чего машина не имеет способности самовозбуждения, как,например, в турбинных генераторах постоянного тока. Генераторы с независимым возбуждением часто устанавливаются на электрич. станциях, т. к. они менее подвержены колебаниям напряжения при различных нагрузках, нежели генераторы с самовозбуждением и, кроме того, при включении они быстрее достигают нормального напряжения. Особенно распространено применение независимого возбу-лсдения в таких генераторах постоянного тока, в которых необходимо в широких пределах регулировать напряжение на зажимах, а следовательно, и ток возбуждения, например, в вольтодобавочных машинах, пусковых (регулировочных) генераторах, уравнительных машинах и тому подобное.
2) Характеристики холостого хода и нагрузочная генератора с последов а тел ь-н ы м возбуждением могут быть сняты только при питании обмотки полюсов от независимого источника, так как при разомкнутой внешн. цепи такой генератор возбуждается очень слабо за счет остаточного магнетизма полюсов. Внешняя характеристика в генераторах с последовательным возбуждением отличается той особенностью, что с увеличением нагрузки генератора растут наводимая в якоре эдс Е и напряжение на зажимах V. Происходит это потому, что через обмотку полюсов проходит полный ток якоря. На фигуре 33 изображены характеристики: холостого хода Е0(1), внутренняя Е(1) и внешняя U(I). Внутренняя и внешняя характеристики получаются из характеристики холостого хода, если сделать допущение, что с
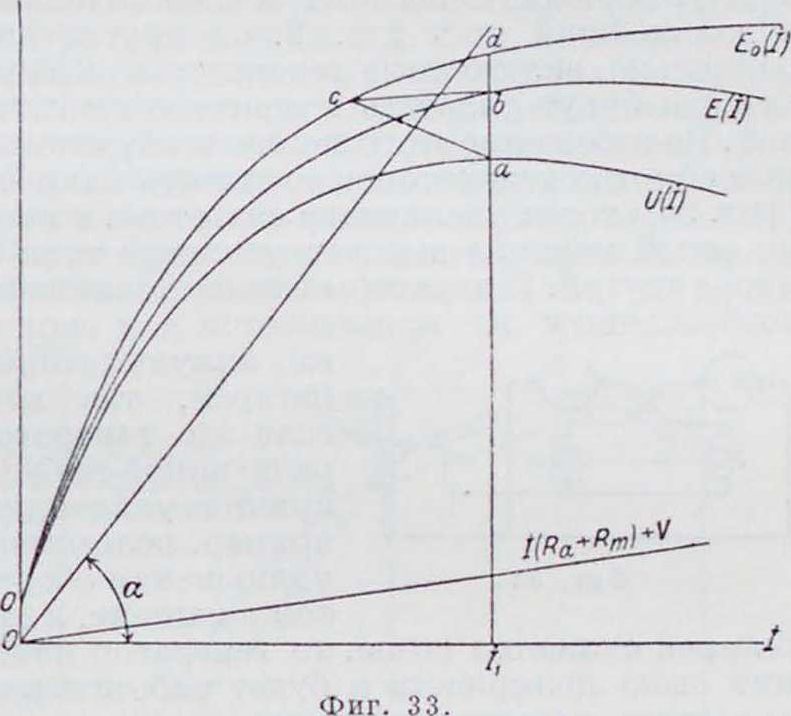
реакция якоря изменяется пропорционально нагрузочному току. Тогда м. б. построен характеристич. тр-к abc, в к-ром катет аЬ равен падению напряжения от омич, сопротивления обмоток якоря и полюсов и переходного сопротивления щеток для определенного тока 1
ab=Ii(Ra + R,„) + ),
а катет be равен силе тока, компенсирующего реакцию якоря, то есть
При изменении нагрузочного тока пропорционально изменяются все три стороны треугольника, причем катет Ьс передвигается параллельно самому себе, описывая точкой v кривую холостого хода, а точкой а—внешнюю характеристику. Если известна внешняя характеристика U(I) для определенного числа оборотов п, то из нее можно вывести внешнюю характеристику для любого числа оборотов η. Т. к. магнитный поток для определенной силы тока в якоре постоянен, то
наводимые при том же токе в якоре эдс будут пропорциональны ч оборотов:
Е_ п _ У + HRg + Rm) + V E n :U + I(Ra + Rm) + V ‘
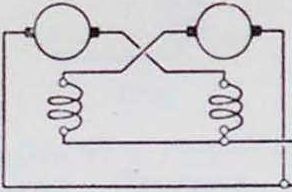
Рассматривая внешнюю характеристику, можно сделать вывод, что в разомкнутом состоянии генератор не возбуждается и что только при уменьшении внешнего сопротивления до некоторой величины начинается возбуждение машины. Работа генератора с последовательным возбуждением становится устойчивой, когда уменьшение внешнего сопротивления приводит к работе в той части характеристики, в которой изменения tg а мало влияют на колебания напряжения. Дальнейшее уменьшение внешнего сопротивления вызывает быстрый рост силы тока, который может достичь величины, опасной для целости обмотки якоря. Параллельное соединение генераторов с последовательным возбуждением встречает затруднения потому, что повышение силы тока в одном генераторе, например вследствие увеличения числа оборотов, немедленно влечет за собою увеличение в нем эдс, к-рое, в свою очередь, вызывает увеличение силы тока, а следовательно и дальнейший рост эдс. Т. о., другие параллельно включенные генераторы разгрузятся и будут работать в качестве двигателей. Во избежание этого можно возбудительные обмотки генераторов соединить накрест (фигура 34); тогда увеличение силы тока в якоре одной машины вызовет усиление тока в якоре другой. Генераторы с последовательн. возбуждением нс применяются для зарядки аккумуляторн. батарей, так как если эдс генератора по какой-нибудь причине упадет, например, вследствие Фигура 34. уменьшения оборо тов в машине, и эдс батареи окажется выше, то генератор изменит свою полярность и будет работать как двигатель, разгружая батарею.
Генераторы с последовательным возбуждением не нашли широкого применения, если не считать предложенной Тюри системы электропередачи с постоянной силой тока и изменяющимся напряжением, выполняемой Atelier de S6cheron в Женеве.
При прочих равных условиях потери на нагревание в кабелях, передающих энергию постоянным током по сериесной системе, сравнительно с трехфазной системой, составляют всего 32% (принимая коэфф. мощности при трехфазном токе cos <?=0,8). Кроме того, отпадают неизбежные при трехфазном токе потери повышающих и понижающих трансформаторов и диэлектрич.потери в изоляторах и кабелях. Указанные преимущества сериесной системы могут дать толчок к развитью интереса к генераторам высокого напряжения с последоват. возбуждением.
3) При вращении вхолостую якоря генератора с параллельным возбужде-н и е м в магнитном поле, образуемом остаточным магнетизмом полюсов, в замкнутой цепи якорной и возбудительной обмоток индуцируется постепенно нарастающий ток
(электродинамнч. принцип, впервые установленный Сименсом в 1880 г.). По мере насыщения магнитов сила тока и магнитный поток ослабевают в своем росте, пока не наступает состояние равновесия при холостом ходе, к-рое м. б. выражено ур-ием:
E0=(Ra + R,n)I„ + V,
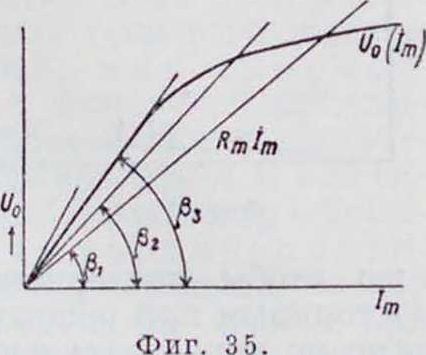
при чем 1„ — 1т. Эдс Е0, наводимая в якоре при холостом ходе, отличается на ничтожную величину от напряжения U0 на зажимах при холостом ходе, которое м. б. непосредственно измерено. Проведем несколько прямых (фигура 35) через начало координат под углом β до пересечения их с характеристикой холостого хода U„(Jm); эти прямые выражают напряжение U на зажимах в зависимости от тока возбуждения 1,„:
У =1т, или у-=tg β=Const.
Как видно из фигура, в нижней части характеристики генератор не может работать устойчиво, т. к. при небольшом увеличении числа оборотов или уменьшении сопротивления Нтнапряжение возрастет до перегиба характеристики холостого хода. Наоборот, при ничтожном падении числа оборотов или увеличении сопротивления напряжение машины упадет до нуля. Во избежание этого генераторы с параллельным возбуждением рассчитываются таким образом, чтобы их характеристики холостого хода и в нижней своей части имели достаточную кривизну. Это достигается тем, что в отдельных элементах магнитной цепи допускают, при сравнительно слабом возбуждении, значительные насыщения на небольших участках. Кривая U(I) (фигура 36) изображает внешнюю характеристику шунтового генератора. По мере увеличения нагрузочного тока напряжение генератора падает. Т. к. возбуждающий ток 1т понижается вместе с напряжением на зажимах, то падение внешней характеристики
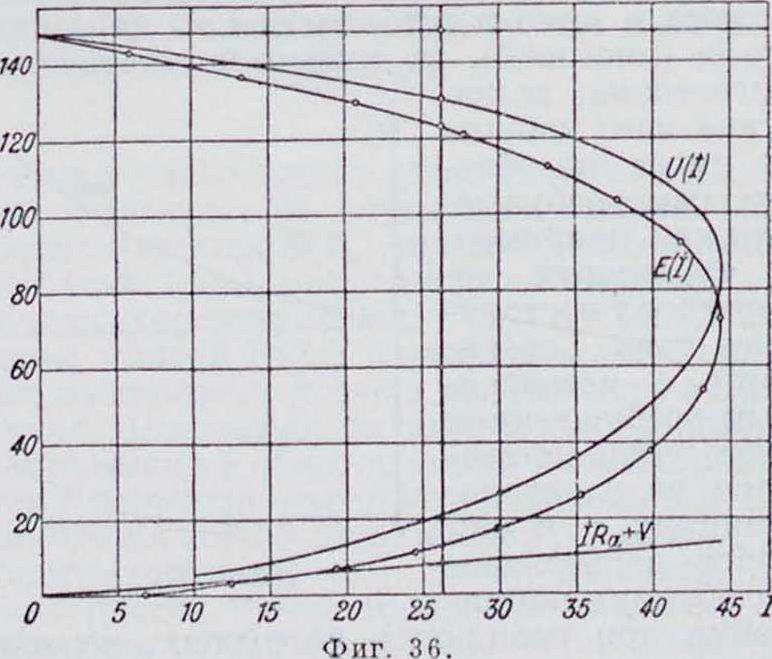
идет быстрее, чем в генераторе с независимым возбуждением. Уменьшая внешнее сопротивление, молено дойти до такой вели-I чины R, при которой всякое дальнейшее его
уменьшение вызовет не только падение напряжения, но и уменьшение силы тока. Прибавляя к внешней характеристике потерю напряжения от омич, сопротивления Rla + V якорной цепи, получим наводимую в якоре эдс. Шунтовый генератор—наиболее распространенный из всех генераторов постоянного тока. К ценным его качествам следует отнести: самовозбуждение при разомкнутой внешней цепи и способность поддерживать до известных пределов постоянство напряжения при изменениях нагрузки, без помощи регулирующего возбуждения реостата, а с помощью последнего—держать напряжение на определенной высоте при всякой нагрузке. При параллельной работе шунтовых генераторов между ними легко распределять нагрузку при помощи шунтовых регуляторов. Шунтовый генератор хорошо выдерживает ток короткого замыкания: он быстро размагничивается, ограждая якорь от опасных перегрузок. Наконец, генератор с параллельным возбуждением обладает свойством не менять своего направления при работе генератором или двигателем; это делает удобным его применение для зарядки аккумуляторной батареи, так как, в случае уменьшения эдс генератора и питания его током из батареи в обратном направлении, машина не изменит своей полярности, потому что направление тока в обмотке магнитов останется неизменным.
4) В генераторах со смешанным возбуждением обе схемы возбуждения дают почти одни и те же результаты, т. к. потеря напряжения в последовательной обмотке и сила тока шунтового возбуждения очень малы. Обычно применяется первая схема.
В зависимости от направления последовательной обмотки магнитный поток, образуемый ею, может усиливать или ослаблять поток шунтовой обмотки. В первом случае напряжение на зажимах генераторов или падает медленнее, чем в шунтовых генераторах, или остается более или w ·" w J< менее постоянным, или лее, наконец, растет вместе с нагрузкой. Т. о., различают недо-компаундировку, компаундировку и пере-компаундировку генератора. Второй случай соединения последовательной обмотки, т.н. нротивокомпаундировка, вызывает более быстрое падение напряжения на зажимах, чем в шунтовом генераторе. Практич. значение имеют лишь компаунднровка и перекомпа-ундировка, причем в последнем случае от комиаундного генератора требуется покрытие потери напряжения в сети путем увеличения напряжения на зажимах с ростом нагрузки. Саморегулирование напряжения компаунд-генератора происходит потому, что падение напряжения, вызываемое ростом нагрузочного тока 7, компенсируется повышающимся напряжением от прохождения i, через последовательную обмотку напряжения. Характеристика холостого хода компа-
ундного генератора такова же, как в шунтовом. т. к. при холостом ходе ток не проходит через последовательную обмотку. Внешняя характеристика получается графич. построением из характеристики холостого хода. 11а кривой характеристики, в точке, соответствующей нормальному напряжению генератора при холостом ходе, строится для определенного нагрузочного тока характеристич. тр-к, катеты которого соответственно равны ампервиткам A W, компенсирующим реакцию якоря, и омич, падению напряжения в якоре 7,(К„+ R,„)+V, где Rm—сопротивление последовательной обмотки (фигура 37). Т. к. напряжение на зажимах U должен быть постоянным, то характеристич. тр-к передвигается параллельно самому себе до совпадения точки с треугольника с кривой E(AW). Расстояние ΡΡχ на ординате будет равняться последовательным ампервиткам, которые необходимо добавить для того, чтобы при нагрузочном токе 11 держать напряжение на зажимах постоянным. Гипотенуза характеристич. тр-ка соответствует нагрузочному току. Т. о., для каждого значения нагрузочного тока м. б. определены потребные ампер-витки последовательной обмотки и изображены в виде кривой 1. Т. к. ток, протекающий в последовательной обмотке, равно как и количество витков, постоянны, то кривая должна иметь характер прямой линии. Другими словами, внешняя характеристика не может быть изображена в виде прямой линии, а будет иметь характер кривой: напряжение U сначала поднимается, оставаясь
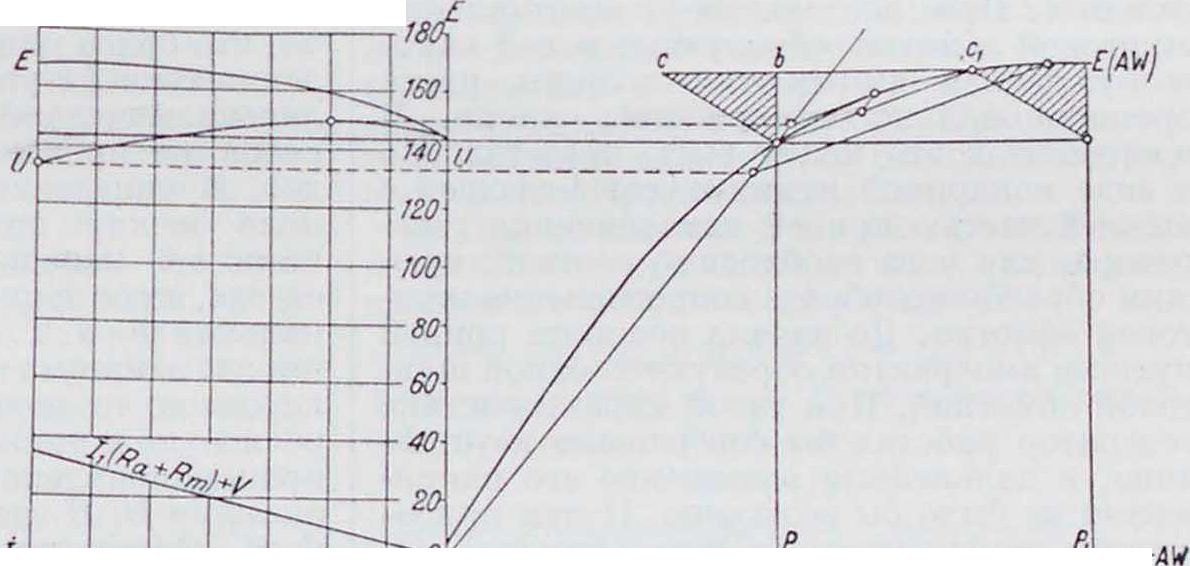
«с /,
so 60
| ч | |||||||||||
| г | ч | ||||||||||
| ч | h4 | ч_ | |||||||||
| "Ч | |||||||||||
| ч |
I Фигура 37.
выше нормального, затем при нагрузочном токе 11 снова равняется заданному, а при дальнейшем возрастании нагрузки падает.
Компаундные генераторы применяются на трамвайных станциях и в ряде других установок, где приходится иметь дело с колеблющейся и толчковой нагрузкой. Параллельное соединение компаундных генераторов возможно лишь при условии параллельного соединения последовательных обмоток выравнивающим токи проводом. Для того чтобы параллельно соединенные генераторы принимали на себя нагрузку пропорционально своей номинальной мощности, они должны удовлетворять условиям: 1) сопротивления последовательных обмоток должен быть обратно пропорциональны номинальным мощностям генераторов; 2) процентное падение напряжения генераторов между холостым ходом и номинальной нагрузкой должен быть одинаково.
Генераторы с неизменяющейся силой тока. Во многих случаях является необходимым иметь ток постоянной силы при постоянном числе оборотов и меняющемся сопротивлении нагрузки в сети, как, например, при электрической сварке вольтовой дугой, в прожекторах ит. п. Генератор Кремера вполне удовлетворяет указан, условиям. Система возбуждения Кремера имеет ту особенность,что на полюсах магнитов насажены три обмотки: последовательная, шунтовал и с независимым возбуждением. Магнитный поток, образуемый первой из них, направлен в сторону, противоположную потоку двух остальных. При постоянстве сопротивления шунтовой обмотки образуемые в ней самовозбуждением ампервитки должны расти пропорцнонатьно напряжению якоря. В координатах это может быть представлено в виде наклонной линии е, совпадающей с нижней частью кривой намагничения генератора, для чего необходимо соответствующим образом подобрать сопротивление шунтовой обмотки. До начата поворота кривой нужные ампервитки образуются одной шунтовой обмоткой. При такой характеристике генератор работат бы совершенно неустойчиво, и датьнейшее повышение его напряжения не было бы возможно. Путем прибавления ампервитков от независимого возбуждения можно поднять напряжение до величины, определяемой пересечением характеристики U (AW) с линией /, паратлельной е и отсекающей на оси ординат ампервитки независимого возбуждения (фигура 38). При нагрузке генератора нагрузочный ток пройдет через последовательную обмотку и образует противокомпаундные ампервитки, так что результирующие ампервитки м. б. представлены в виде прямой д. Расстояние менаду линиями fug соответствует противо-компаундным ампервиткам и реакции якоря. Сила тока растет пропорционально увеличению расстояния между линиями и д, а напряжение падает до тех нор, пока отношение между напряжением и силой тока не будет равно внешнему сопротивлению. Наибольшая сила тока достигается при совпадении линии д с линией е. Величина этого тока зависит от величины ампервитков независимого возбуждения. Усиливая незави
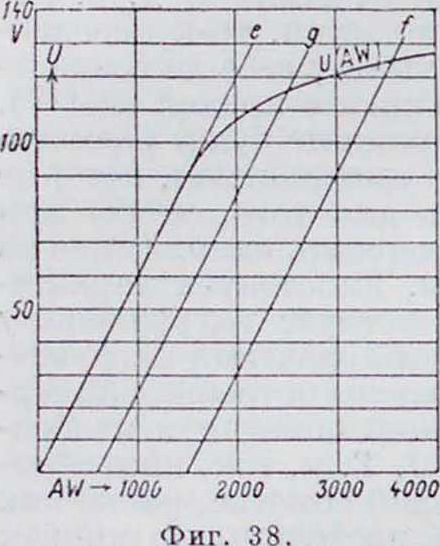
симое возбуяедение, достигают роста тока до того момента, пока образуемые им ампер-витки не будут прямо противоположны ампервиткам независимого возбуждения. Поэтому, регулируя независимое возбуждение, можно получить любую величину тока, до максимального включительно.
Генератор Розенберга. В случаях, когда требуется ток постоянной силы, независимо от числа оборотов генератора, при постоянном внешнем сопротивлении и постоянном напряжении, весьма распространено применение генераторов с поперечным полем системы Розенберга. Эта машина применяется преимущественно в качестве генератора для освещения поездов, где она приводится в движение от оси вагона. Генератор Розенберга снабжен двумя группами щеток (фигура 39): одна группа лежит в нейтральной зоне (Ь,Ь), другая—на средней линии полюсов (В,В). Первая группа замкнута на короткое, вторая присоединена к внешней сети. Возбуладение—независимое, питаемое от аккумуляторной батареи током постоянной силы. Магнитный поток обмотки возбуждения и поток, образуемый нагрузочным током I, проходящим через щетки В, В в обмотку якоря, действуют в диаметрально противоположных направлениях и дают результирующий продольный поток Ф. В обмотке якоря индуктируется ток между щетками Ь, Ь, образующий поперечное поле Фд, замыкаемое через полюсные наконечники. В обмотке якоря поперечным полем Ф(/ индуктируется нагрузочный ток I, реакция которого на Магнитный поток полюсов настолькосиль-на, что более или менее значительного усиления тока I с увеличением числа оборотов не происходит. В поперечном поле между щетками Ь,Ь наводится эдс, пропорциональная Ф η. Т. к. эта эдс замкнута на короткое, то поперечное поле также пропорционально Ф-п, и наводимая между щетками В, В эдс E=IR пропорциональна Ф-п1. Обозначив ампервитки в параллельной возбудительной обмотке через AW„, и ампервитки якоря через Iwa, получим:
IR=C(AWm-Iwa)n пропорционально AW„, — Iwa, или AWmIi ’
>а+С-п
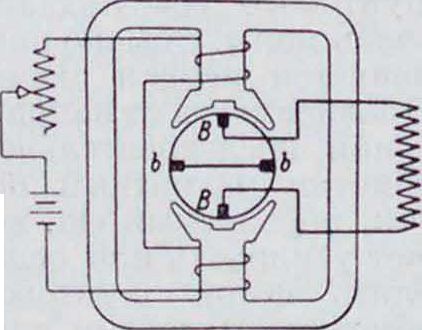
Фигура 39.
Ф
I =
где C=Const. При и=оо или 11=0 уравнение примет следующий вид:
I=AW»·, или lwa=AWm.
Отсюда молено сделать тот вывод, что нагрузочный ток не может превысить определенной величины и что ампервитки Iwa якоря должен быть всегда несколько меньше ампервитков AW,„ возбуждения. Машины Розенберга при колебаниях от 800 до 2 400 об/м. изменяют напряжение и силу тока на 12%.
Генератор с поперечным полем м. б. построен самовозбуждающимся. Возбудимая обмотка в таком случае включается последовательно со щетками В, В во внешнюю сеть. В таком соединении генератор подходит для применения в дуговой сварке. Величина тока может регулироваться в широких пределах изменением числа оборотов, параллельным включением сопротивления в возбудительную обмотку или механически—· изменением магнитного потока, проходящего через полюсы, путем увеличения или уменьшения воздушного зазора в полюсах.
Характеристики и применения Д. 1с а к двигателей постоянного тока. В двигателях с независимым возбуждением (фигура 40), как, впрочем, и во всех двигателях постоянного тока, обмотка якоря забирает из сети ток, так что напряжение U на зажимах двигателя будет больше наводимой в якоре противодействующей эдс В на величину потери напряжения от омического сопротивления R обмотки якоря и потери напряжения V от переходного сопротивления щеток, то есть
Фигура 40.
U=E+(IJt+V),
где 1а—сила тока, который протекает в обмотке якоря.
Пуск в ход двигателей с независимым возбуждением обычно совершается при помощи включения сопротивления R, постепенно уменьшаемого по мере уменьшения числа оборотов двигателя. Непосредствен. включение двигателя в цепь, при отсутствии противодействующей эдс в обмотке неподвижного якоря, имело бы следствием образование тока слишком большой силы, могущего повредить обмотку якоря. Только очень небольшие двигатели постоян. тока, мощностью до 0,25 №. пускаются в ход непосредственным включением их в цепь. При соблюдении известных условий, однако, практически допустим пуск в ход двигателей выше 600 № как с независимым возбуждением, так и само возбуждающихся, путем непосредственного включения их в сеть без посредства пускового сопротивления (реостата). Как показали опыты Треттниа, в тех случаях, когда момент инерции приводимых в движение масс не слишком велик, удар тока, достигающий по величине почти троекратного тока полной нагрузки, держится не более 0.1—0,2 секунды. Весь процесс пуска длится ие более 1 сек., в силу чего якорь за этот короткий период запуска не успевает даже заметно нагреться. Этот метод пуска применяется в судовых двигателях, непосредственно соединенных с винтом.
Число оборотов двигателя п, как это вытекает из формулы
_ U-(RI„ + V) п-
жениго на зажимах U, т. к. потеря напряжения RIn + V составляет только небольшой процент от напряжения на зажимах (борцах) машины U. Это свойство двигателям, б.
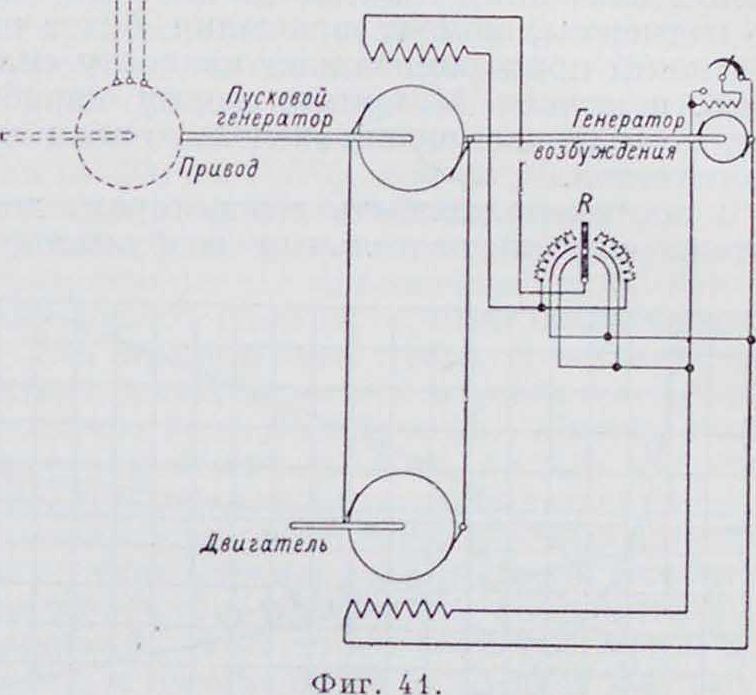
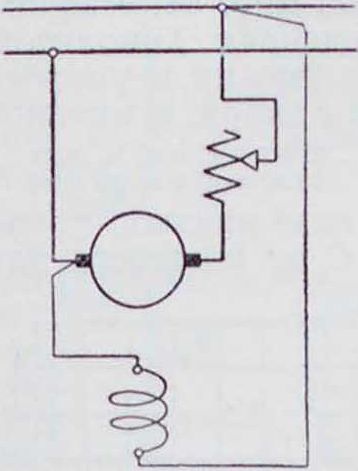
использовано для регулирования числа оборотов. Однако, изменение напряжения якоря путем включения в его сеть сопротивления,поглощающего большое количество энергии, нежелательно, в особенности в тех случаях, когда приходится регулировать обороты двигателя в широких пределах. В таких случаях применяют специальный пусковой генератор с независимым возбуждением, питающий двигатель также с независимым возбуждением (фигура 41). Изменение числа оборотов двигателя и напряжения генератора достигается путем регулирования силы тока возбуждения генератора. При этом методе регулировки (схема Варда-Леонарда) достигаются минимальные потери.
2) Для двигателя с последовательным возбуждением м. б. написаны следующие основные ур-ия эдс Е:
E=U — (7(Да + Rm) + V] и Е=с · п Ф.
Т. к. магнитный поток Ф образуется током якоря 1, можно написать:
*-/(*)·
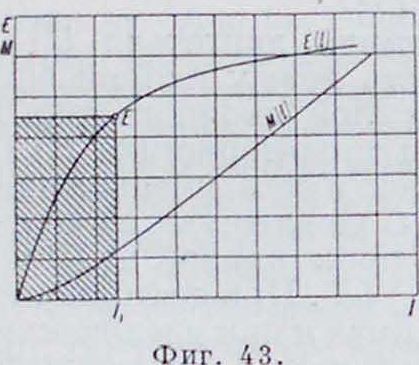
Внешняя характеристика двигателя U (I) показывает зависимость между напряжением U на зажимах и силой якорного тока I (фнг. 42). Внутренняя характеристика E (1) получается из внешней путем уменьшения ординат напряжения U на зажимах на соответствующее каждой точке кривой падение напряжения I( Ra +/£,„) 4-V. При постоянстве напряжения U на зажимах и при увеличении нагрузки двигателя сила тока I и магнитный поток Ф будут расти, в то время как эдс Е и число оборотов п будут падать. С уменьшением магнитного потока Ф число оборотов п и эдс Е растут. Путем графич. построения можно получить кривую, характеризующую зависимость числа оборотов от силы тока I при U=Const. Характеристика вращающего момента для последовательных двигателей определяется на основании общего выражения для М:
М=*с Ф I=c Е · I, т. к. Ф=с" Е. Построение характеристики
23
изменяется почти пропорционально напря-т. Э. m. VI.
можно легко сделать из внутренней характеристики (фигура 43), принимая во внимание, что площадь EI для каждой точки характеристики выражает вращающий момент. При малых значениях тока, когда магниты слабо насыщены, момент вращения будет расти почти пропорционально квадрату силы тока, и кривая ili примет форму параболы; по мере насыщения железа кривая выпрямляется.
В противоположность генераторам, двигатели с последовательным возбуждением
получили большое распространение в качестве тяговых моторов в трамвайном и ж.-д. транспорте и в крановых устройствах. Сериес-ные двигатели обладают ценными для целей тяги свойствами развивать большое усилие при пуске и преодолевать большое сопротивление меньшим числом оборотов. Из основной ф-лы для числа оборотов
, _ “~ 1ПНД + НЯ,) + У1 п с Ф
вытекает, что при теоретическом холостом ходе, т. e. ili=0, 1= 0 и Ф=0, число оборотов п растет до бесконечности. Практически число оборотов при I =0 достигает конечной величины, но опасной для целости якоря, т. к. во много раз превосходит нормальное число оборотов. Между тем как в двигателях с независимым возбуждением, а также с параллельным возбуждением, число оборотов близко к постоянному и почти не зависит от изменения момента вращения, в двигателях с последовательным возбуждением число оборотов быстро падает с увеличением момента вращения. Это свойство двигателя автоматически уменьшать число оборотов при увеличении момента вращения делает этот тип двигателя весьма пригодным для целей тяги.При троганни электровоза с места, когда вредное сопротивление имеет максимальную величину и требуется развить наибольшую силу тяги для преодоления момента инер ции и сообщения массе электровоза надлежащего ускорения, двигатель забирает максимально допустимый ток, к-рый и производит наибольший вращающий момент. Повышение сопротивления на подъемах и кривых двигатель преодолевает с меньшей скоростью, то есть относительно с меньшим расходом тока, предохраняя электрич. станцию от резких колебаний нагрузки. Недостаток двигателей с последовательным возбуждением чрезмерно увеличивать число оборотов при разгрузке отпадает в тяговых двигателях, т. к. они пускаются в ход постоянно под нагрузкой. Регулирование скорости, как это вытекает из ф-лы для числа оборотов, достигается или изменением магнитного потока, путем включения параллельного сопротивления в обмотку магнитов, или изменением напряжения на борнах двигателя путем последовательного включения в цепь якоря реостата. Последний способ регулирования числа оборотов идет целиком за счет поглощения части мощности на нагревание сопротивления, т. к. реостат, включенный перед двигателем, не изменяет забираемого тока. При шунтировании обмотки возбуждения через нее проходит только часть тока, а остальная будет поглощаться реостатом, вследствие чего повышается число оборотов двигателя. Ослабление потока вызовет уменьшение противодействующей эдс якоря, а, в силу сохранения той же величины вращающего момента, двигатель будет забирать больший ток. Спраг предложил регулировать число оборотов двигателя с последовательным возбуждением без применения реостата, путем подразделения обмотки полюсов на несколько групп и соединения их при помощи особого переключателя последовательно или параллельно. В способе Справа регулирование достигается без потерь энергии. Экономично также регулирование оборотов сериесных двигателей изменением напряжения у зажимов. Принимая во вннма-п и ние, что п=и, при последовательном включении двух одинаковых двигателей, связанных друг с другом механически, каждый из них, развивая при общем токе одинаковую мощность, будет иметь на зажимах половину напряжения сети, в силу чего число оборотов соответственно понизится. Этим приемом пользуются в трамвайных вагонах. При пуске в ход двигателя необходимо включать пусковой реостат, выводя постепенно сопротивление с таким расчетом, чтобы сила тока во все время пуска не выходила из определенных пределов.
3) Для двигателя с параллельным возбуждением (фигура 44) действительны следующие основные ур-ия:
E=U — (RaIn + V) и Е= с η · Ф.
Магнитный поток, в зависимости от роста нагрузки и силы тока в якоре, уменьшается вследствие реакции якоря. Т. о., для сохранения противодействующей эдс Е на постоянной высоте пришлось бы увеличить число оборотов п. С другой стороны, омическое падение напряжения в якоре R„I„+V растет по мере увеличения нагрузки и силы тока в якоре, что, в свою очередь, умеиь-
шает эдс Е, т. о. при постоянство магнитного потока Ф число оборотов двигателя упало бы. Как видно, па число оборотов двигателя реакция якоря и омическое падение напряжения оказывают противоположное действие. Скорость вращения двигателя увеличивается при преобладающем влиянии реакции якоря и уменьшается при преобладании падения напряжения R„la + V. Если на кривой, которая изображает хар актеристи ку холостого хода E0(AW), взять несколько точек Фигура 44. с соответств. им ампер-
витками AW возбуждения и построит!, для каждой из них кривую зависимости числа оборотов п от нагрузочного тока, то характер этих кривых будет находиться в прямой зависимости от соотношения величин омическ. падения напряжения, вызванного реакцией якоря (фигура 45). При их равенство кривая п(1) будет выражена прямой линией. Из ур-ня, действительного для момента вращения двигателя, М =с-Ф-1 вытекает пропорциональность между моментом вращения и силой тока при Ф=Const. Однако, вследствие реакции якоря сила магнитного потока Ф ослабляется,
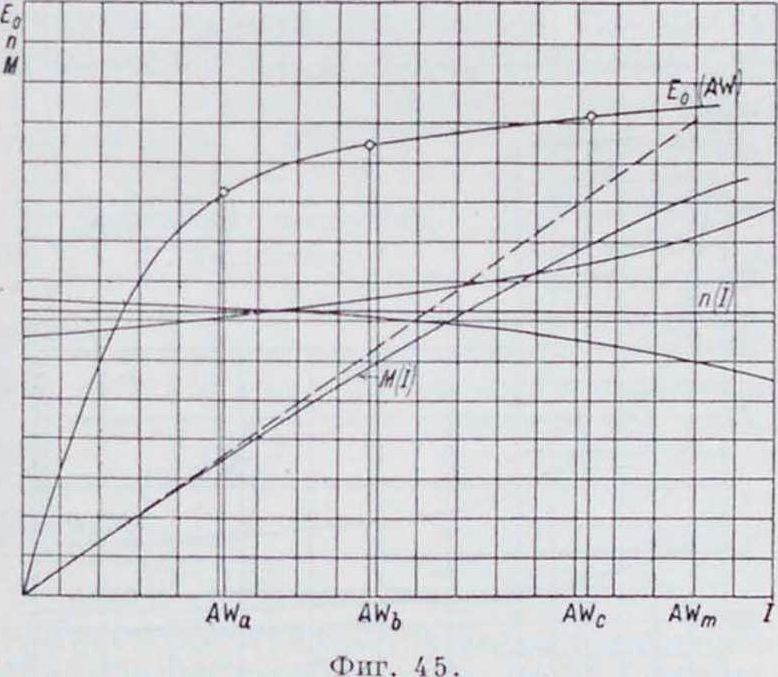
и вращающий момент растет несколько медленнее нагрузочного тока. Регулирование скорости шунтовых двигателей достигается изменением напряжения U на зажимах или изменением потока Ф. При включении сопротивления в цепь якоря напряжение U уменьшится на величину падения напряжения в сопротивлении. Скорость вращения двигателя понизится, что вытекает из ур-ня:
n=,J-TY»·
с,-Ф
Этот способ регулирования числа оборотов неэкономичен, т. к. идет за счет поглощения части энергии в сопротивлении реостата и м. б. допущен лишь для мелких двигателей. Нолее экономично регулировать число оборотов путем изменения силы магнитного потока, вводя в цепь возбуждения сопроти вление реостата, т. к. вследствие незначительности тока возбуждения потеря энергии невелика. В шунтовых двигателях до 10 kW обороты м. б. повышены путем ослабления поля до 30—35%, а у более мощных двигателей—на меньший процент, во избежание появления искрения. Двигатели с добавочными полюсами и компенсационной обмоткой допускают повышение оборотов от 300 до 100%, в зависимости от мощности, а в специальных случаях, при особо прочных конструкциях якоря, допускается кратковременное повышение числа об/м. до 10-кратного размера против номинального.
Для правильного пуска шунтового двигателя необходимо соблюдение следующих условий: 1) возбудительная обмотка должна сразу включаться на полное напряжение; 2) в цепь якоря должно включаться сопротивление, постепенно выводимое по мере раскручивания якоря. Шунтовой двигатель, работающий с постоянным напряжением на зажимах, имеет те же свойства, что и двигатель с независимым возбуждением, но обладает существенным преимуществом—способностью самовозбуждаться. Вследствие своих характерных особенностей, именно: 1) способности не менять направления, работая в качестве генератора или двигателя, что м. б. использовано у двигателя для возвращения энергии в сеть при торможении, 2) способности экономично регулировать обороты в широких пределах, 3) способности автоматически сохранять при всякой нагрузке почти постоянное число оборотов при U =Coiist, 4) способности сохранять почти полную пропорциональность между моментом вращения и нагрузочным током,—шунтовой двигатель получил большое распространение. Он применяется на з-дах и ф-ках в качестве группового или одиночного привода к станкам, вентиляторам, насосам и прочие За последнее время поднялось значение шунтового двигателя (отчасти и компаундного) в станкостроении, в связи с использованием его способности регулировать в широких пределах число оборотов. Вместо того чтобы изменять скорость рабочих процессов при помощи сменной зубчатой передачи, перешли к непосредственному использованию регулирующегося двигателя, объединяющего привод и передачу. Расход энергии в станках с регулирующимся двигателем на 40— 70% меньше, чем в станках со сменной зубчатой передачей. В токарных станках двигатель пристраивается к шпиндельной бабке. Регулировочный реостат или контроллер обслуживается с рабочего моста. 15 мощных станках управление производится при помощи универсальной кнопочной системы. В строгальных и долбежных станках применение реверсивного регулирующегося двигателя дает экономию в энергии 50-1-80% по сравнению со сменной ременной пли зубчатой передачей. AEG применяет для непосредственного привода строгальных станков шунтовые регулируемые двигатели, снабженные добавочными полюсами. Регулировка числа оборотов в пределах от 1 : 2 до 1 : 3 происходит путем ослабления поля. Для большей устойчивости в работе мотора при высоких скоростях полюсы снабжаются
*23
несколькими последовательными предохранительными витками. Перемена направления происходит, при полном возбуждении и полном числе оборотов двигателя, без потерь, с отдачей в сеть книетнч. энергии движущихся частей станка при торможении. Т. к. живая сила движущихся частей пропорциональна квадрату скорости, то при снижении числа оборотов двигателя до V, остается неиспользованной лишь Ve кинетической энергии, тогда как 8/„ возвращаются обратно в сеть. Пуск в ход после переключения, само переключение и ускорение обратного хода совершаются автоматически. Включение сопротивлений производится регулирующим контроллером и контакторами.
Из компаундных двигателей интерес представляют лишь двигатели с пере-компаундировкой. Свойства таких двигателей, соединяющих в себе характеристические особенности последовательного и шунтового возбуждений, определяются, как и в генераторах, тем, какое из возбуждений превалирует. При обладании последовательной обмотки возбуждения над шунтовой, двигатель имеет свойства сериесного, то есть обладает способностью преодолевать механич. сопротивления, уменьшая количество оборотов и развивая возрастающий момент вращения. Шунтован обмотка гарантирует двигатель от разноса при разгрузке. В случае преобладания шунтовой обмотки двигатель отличается от обыкновенного шунтового тем, что при пуске в ход двигатель под действием последовательной обмотки развивает повышенный против шунтового момент вращения.
VI. Принципы расчета и конструкции. Якорь. При установлении основных размеров якоря исходят из формулы так называемой «машинной постоянной»:
„ D-ln С-10"
Ь ~~ kVA Oi-Bi-AS’
где: D и I—диаметр и длина якоря; а,—отношение расчетной ширины дуги полюса к полюсному делению, то есть а,·=ь-; AS—линейная нагрузка якоря; kVA=^0(/0 (U и I—
наибольшее напряжение на зажимах и наибольший ток, при которых должна работать Д.); В!—средняя магнитная индукция в воздушном зазоре. Для а( допускаются следующие значения: 1) для машин без добавочных полюсов: двухполюсных—от 0,0 до 0,7; многополюсных—от 0,65 до 0,8; 2) для машин с добавочными полюсами—от 0,5 до 0,75. Допустимые величины В: и AS зависят от диаметра ϋ якоря: чем больше диаметр, тем выше их предельные значения. Для машин без добавочных полюсов допускают: 1) для малых мощностей, при D равном 30 см, Bt— от 5 000 до 7 000 гаусс; 2) для средних мощностей, при 30 с.н <Βΐ 100 см,—Βι от 7 000 до 9 000 гаусс; 3) для больших мощностей, при 1 000 с.н > D 5= 300 с.н,—В от 9 000 до 11 000 гаусс; 4) для быстроходных машин с числом периодов=?(’1 > 25, магнитная индукция допускается несколько меньшая. Линейные нагрузки AS якоря допускаются следующие: для малых мощностей—от 120 до 100, для средних—от 100 до 240, для больших—от 240 до 300. Для машин с добавочными полюсами и с естественной вентиляцией Рихтер приводит значения Bt и AS, в зависимости от диаметра якоря, в виде кривых, изображенных на фигуре 40. Машинная постоянная С, выведенная Арнольдом для Д. с добавочными полюсами и умеренными окруж. скоростями г)якоря, а именно:
для 10 сантиметров <с Г) ^ 4Г) см. 12 м/ск v ^ 15 м/ск для 45 сантиметров ^ D ^ 300 см. 15 м/ск ^ v ^ 25 м/ск приведена на фигуре 47 в виде кривых, показывающих зависимость С от мощности машины. В Д. с большими окружными скоростями, доходящими в турбогенераторах до 80—
90 м/ск, машинная постоянная, несмотря на наличие добавочных полюсов и компенсац. обмотки, значительно больше, чем в машинах с умеренными окружными скоростями, вследствие трудных условий охлаждения и коммутации. Сердечник якоря, с целью уменьшения потерь от токов Фуко, изготовляется из листовой динамной стали толщиной 0,5 миллиметров, а при числе периодов больше 60—0,30АО,35 миллиметров. Потери от пере-магничивания стали, при магнитной индукции 10 000 гаусс и толщине 0,5 миллиметров, колеблются от 3,2 до 3,0 W/1C3. В некоторых случаях вместо простой динамной стали применяют легированную сталь, имеющую потери оb
) У А
100 200 000 1000 1000 ZOOOkU
Фигура 47.
Фигура 46.
от 1,8 до 2,2 Vf/кг. За последние годы в наиболее ответственных случаях начали применять стать, изготовленную электролитич. способом и обладающую высокой магнитной проводимостью. Из листов, размером 1 х2 м, штампуют диски, в которых просекаются пазы. Диски, диаметром до 80—100 см, штампуются из одного листа, а при бблыпих диаметрах якоря пластины составляются из сегментов (смотрите Электромашиностроение). Отдельные пластины изолируются друг от друга прослойками тонкой бумаги, толщиной 0,02-30,05 миллиметров, наклеенной предварительно на листовое железо. Вместо бумаги можно пользоваться специальным изоляционным лаком, преимущество κ-poro заключается η том, что якорь, спрессованный из покрытых им пластин, теряет не больше 3—5% полезного сечения (вместо 8—10% при бумажной
Фигура 48.
изоляции). Пазы в большинстве случаев изготовляются с параллельными краями;только в маленьких машинах, во избежание слишком большого сужения зубца, пазы получают конич. форму. Пазы для круглого провода обычно имеют закругленную форму. При прямоугольной форме провода пазы имеют плоское основание. Па фигура 48 изображены наиболее употребительные формы пазов. Большое значение имеет форма вершины паза у воздушного зазора. Совершенно закрытый паз увеличивает самоиндукцию короткозамкнутой обмотки. Полузакрытым пазом достигается более равномерное распределение магнитного потока в воздушном зазоре,что, однако, не имеет болыиогозначения, так как все равно приходится делать сравнительно большой воздушный зазор с целью уменьшения реакцииякоря. преимущество полузакрытого или совершенно закрытого паза могло бы быть использовано в машинах с добавочными полюсами и компенсационной обмоткой, если бы это не было сопряжено с необходимостью применять вместо шаблонной обмотки ручную. Вследствие этого в динамомашине постоян. тока обычно применяются открытые пазы.
Потери в стали и обмотке якоря выражаются в виде повышения ί°. Для лучшего отвода тепла и увеличения излучающей поверхности в сердечниках якорей, за исключением якорей машин малых мощностей, устраивают вентиляционные каналы, шириной 0,6-А1,2 сантиметров на каждые 4—С сантиметров длины якоря. Для образования вентиляционных каналов отдельные, собранные в блок, пакеты стали удерживаются на желаемом расстоянии при помощи дистанционных распорок, укрепляемых на концевых пластинах пакета (фигура 49), которые имеют двойную или тройную толщину для увеличения жесткости. Каналы с дистанционными распорками действуют как вентилятор. Воздушный поток, прогоняемый через каналы, охлаждает гл. образом внутреннюю и внешнюю поверхности якоря, тогда как из самих каналов тепло отводится в незначительном количестве вследствие задержки теплоотдачи в аксиальном направлении через бумажные прослойки. В закрытых машинах с затрудненными условиями охлаждения, как, наир., в трамвайных и железнодорожных двигателях, прибегают к аксиальному расположению каналов, пропуская охлаждающий воздух через них при помощи вентилятора. В закрытых машинах с т. н. охлаждающей рубашкой, внутренний вентилятор служит для поддержания равномер-нойтемнературы,тогда как наружный— прогоняет охлаждающий воздух через рубашку. В больших машинах иногда устраивают и аксиальные и радиальные каналы одновременно (фигура 50).
Закрепление якорного сердечника, надетого непосредственно на вал, в малых машинах производится при помощи нажимных шайб; в средних и больших машинах сердечник насаживается на якорный корпус, представляющий собою втулку с ребрами, и удерживается на нем давлением нажимных колец. Для поддержки лобовых соединений обмотки нажимные кольца отливаются вместе с держателями обмотки в форме колец с отверстиями для лучшего доступа воздуха к лобовым соединениям обмотки. В изображенной на фигуре 51 конструкции нажимные кольца стянуты болтами, проходящими частично через обод якорного корпуса, частично через железо сердечника.
Якорная обмотка. Когда сила тока 1„ в якоре равна 60—80 А, применяется стержневая обмотка; при меньших силах тока—проволочная. Целесообразно помешать в один паз по несколько проводов, так как при обычной двухслойной обмотке одновременное нахождение в пазу од-пой стороны секции, в которой индуктируется эдс, и другой, которая проходит через период коммутации,действует демпфирующим (успокоительн.) образом па последнюю. Однако, Арнольд рекомендует не превышать следующ. сил якорного тока в одном пазу;
Iа $ 22S А при 4 стержнях в пазу 1а iS 150 » » 6 » »
ίη ^ 115 » » 8 » »
то есть чтобы произведение числа стержней в одном пазу на силу тока в якоре не превышало 900. Выбор плотности тока
где q„ — сечение проводника, обусловлен
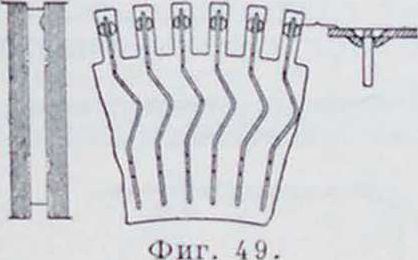
Фпг. 5
соображениями предельно допустимого нагрева и кпд. Для предварительного расчета пользуются опытными данными: в машинах мощности свыше 100 k V и с хорошей вентиляцией можно доводить плотность тока до 4,5—4,8 A/jvut2; в машинах до 30 kW, хорошо вентилпрованных,—до 5—6 А /мм2. Исходя из того соображения, что каждый ватт потерь, превращающийся в тепло, требует определенной охлаждающей площади, молено установить зависимость между плотностью тока и нагреванием; Арнольд дает ее в виде следующей ф-лы:
с 4 700(1 +0,1«) aak-AS
где V—окружная скорость якоря в м/ск, аок—поверхность охлаждения на 1W потерь (аак для средних машин не должна быть меньше 9—12 см2). При расчете сечения якорных стержней необходимо учесть потерю от токов Фуко, которая в быстроходных машинах с глубокими пазами может достигнуть значений, в к раз превышающих омич, потери. Наибольшее значение коэфф-та увеличения сопротивления, по Дрейфусу, получается в том случае, когда коммутация совершается в бесконечно малое время и когда якорь имеет диаметральную обмотку. При прямоугольном сечении проводов наибольший коэффициент увеличения сопротивления kajодного провода, лежащего в р-ом ряду паза, может быть выражен:
ксо =14- Зл(3р2 — Зр + 1)£2,
где I—приведенная высота провода (смотрите Генератор переменного токи). Наибольший коэффициент увеличения сопротивления коо для всей обмотки где т—число горизонтальных рядов проводов в пазу, А—отношение средней длины лобового соединения провода к длине провода в теле якоря, или, что то же, к длине якоря. Для того чтобы перейти к рассмотрению влияния конечных коротких периодов коммутации, Дрейфус вводит фактор F, на к-рый он умножает потери от токов Фуко, пропорциональные fcoo— 1, и получает для коэфф-та увеличения сопротивления всей обмотки прямоугольного сечения след, выражение:
7c=l + 3;.ί,.
m {»
1 + Д ‘
Для диаметральной обмотки, принимая, что коммутация совершается но прямой линии во время У о и что m3·· 2, можно написать:
где д, _ °·116
1 ~ 0,13+ σ ’
„ Ά 1 Ь + (и-1)|д. 1
т, · «* ч «· ’
(Ь—ширина щетки, Тг — половина периода, Тд—полюсное деление, tk—коллекторное деление). Так как а обычно лежит между U,0G5 и 0,25, то к=i + 0·07 л п К i + i + ;.K ь + (и-
Ф*
т-
откуда можно сделать вывод, что потери на токи Фуко обратно пропорциональны числу горизонтальных рядов т.
Критическая высота провода получается из следующей формулы:
h eg 1.9^1Ь i-(и- 1)(д
0 а · m I з У Тк
Коэфф. увеличения сопротивления всей обмотки к0 при критической высоте провода будет приблизительно равен 1,5.
Обмотка,состоящая из секций, располагается в пазах машины таким образом, чтобы в каждом пазу помещались две стороны секций. Обмотка по способу выполнения подразделяется на ручную и шаблонную. Ручная обмотка применяется лишь для малых двухполюсных машин, так как невозможность достижения полной симметричности обмотки не имеет в них столь большого значения, как в средних и крупных машинах. С целью избежания гудения, производимого машинами вследствие пульсации магнитного поля, якори в малых машинах выполняются б. ч. с нечетным числом зубцов. При обмотке такого якоря часть секций обеими своими сторонами будет лежать в нижних частях пазов, часть секций—в верхних и часть секций—одной стороной в верхней и другой в нижней части пазов. Таким обр. получаются укороченные, удлиненные и средние секции. При числе пазов, кратном трем, можно секции расположить в такой последовательности, чтобы эти три величины обмотки попеременно следовали одна за другой. Такая обмотка может считаться близкой к симметричной. Обмотка якорей малых машин производится на обмоточных станках, в которых якорь поворачивается вокруг оси, перпендикулярной к валу якоря. Благодаря особым приспособлениям провода легко закладываются в полузакрытые пазы якоря. В шаблонной обмотке каждая секция изготовляется отдельно, получает вполне законченную форму и в неизмененном виде закладывается в открытые пазы якоря. Шаблонная обмотка имеет следующие преимущества: 1) обеспечивается симметричность
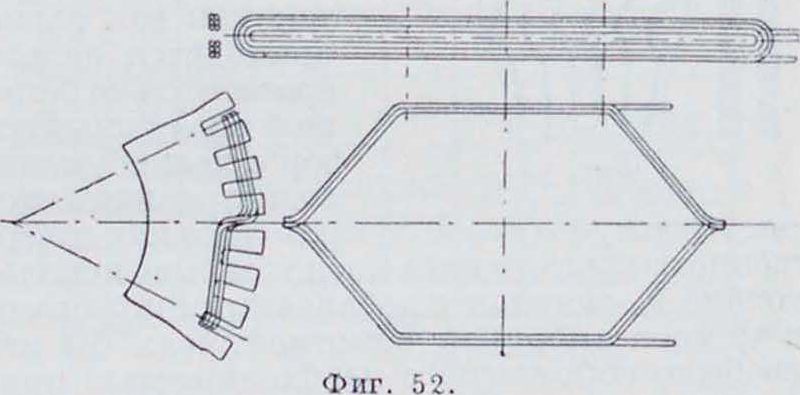
обмотки; 2)изоляция секции м. б. произведена более тщательно; 3) достигается лучшее охлаждение; 4) м. б. налажено массовое производство; 5) поврежденная секция легко заменяется. Секции шаблонной обмотки изготовляются на специальных приспособлениях, состоящих из плоской металлич. рамы, на к-рую наматываются провода, после чего рама растягивается, образуя лобовые соединения и придавая сторонам секции определенный наклон, соответствующий радиальному расположению пазов (фигура 52).
В зависимости от положения соединительных частей секции различают лобовую и панцырную обмотки. При лобовой обмотке лобовые соединения расположены на торцовых сторонах якоря; получается укороченная машина, но зато охлаждение обмотки затруднительно. Этот род обмотки применяется в тех случаях, когда машина имеет перемежающийся режим работы и размеры ее стеснены помещением (наприм., в крановых моторах). В панцирной обмотке лобовые части образуют цилиндрич. поверхность, доступную обтеканию охлаждающего воздуха.
Изоляции якорной обмотки можно подразделить на: изоляцию отдельных проводов, входящих в секцию; изоляцию отдельных групп проводов секции; изоляцию одной стороны секции от другой, находящейся в том же пазу, и изоляцию обеих от железа якоря. Напряжение нормальных машин постоянного тока обыкновенно не превосходит 600—700 V, но специальные машины имеют напряжение до 5 000—10 000 V. Чем выше напряжение, тем больше места занимает изоляция н тем хуже используется полезное сечение паза, что ведет к удорожанию машины. Поэтому на правильный выбор надежной изоляции и на улучшение качества изоляционного материала обращается особое внимание. На фигуре 53 приведены кривые коэфф-та заполнения пазов для разных напряжений, в зависимости от сечения проволоки, а на фигуре 54—в зависимости от сечения стержня. Эти кривые действительны для машин нормального исполнения. Общая толщина изоляции для стержневой обмотки видна из табл. 1.
Таблица 1. — Общая толщина и з о л я ц и и для стержневой о б м о тк и.
| Число стержней одного ряда в пазу | 1 | 2 | 3 | 4 | 5 |
| Напряжение на зажимах в V | Толщина | ИЗОЛЯЦИИ в | ММ | ||
| 125 | 2.5 | 3,0 | 3,5 | 4,0 | 4,5 |
| 250 | 2.8 | 3.4 | 4.0 | 4.6 | 5.2 |
| 650 | 3.2 | 4.0 | 4.8 | 5,6 | 6.4 |
| 750 | 3.8 | 4.6 | 5,4 | 6.2 | 7,0 |
| 1 500 | — | 6,5 | 7,5 | 8,5 | 9.5 |
Стержневая обмотка для 500 V, изображенная на фигуре 55, может служить примером изоляции, к-рую составляют: 1—пропитанная изоляционным
лаком хлопчатобумажная лента,толщиной 0,4 миллиметров, намотанная в перехлестну; 2—промасленная бумага в 0,1 дл; 3—красная бумага в 0,2 миллиметров и промасленное полотно в 0,3 .M.vt; 4— хлопчатобумажная
(тафтяная) лента в 0,4 миллиметров, пропитанная лаком; 5—зазор в 0,1 миллиметров; 6—картон в 0,2 миллиметров; 7—картон в 0,5 миллиметров; 8—деревянный клин; 0—мягкий медный стержень прямоугольного сечения с закругленными краями. Обмотанные якори подвергаются сушке в вакуумных печах, после чего погружаются в изоляционный лак и остаются в нем до тех пор, пока не перестанут выделяться пузырьки воздуха.
Затем якорь помещается на 8—12 часов в сушильный шкаф, где он сушится при температуре ок. 90°.
Обмотка якоря на протяжении паза удерживается от действия центробежной силы клиньями из фибры, бука или геокса, загоняемыми в вырезы у вершины зубца, лобовые же соединения стягиваются стальной, бронзовой и тому подобное. проволокой (бандажной), толщиной 0,6-г 1,6 миллиметров. В некоторых случаях обмотку закрепляют только бандажной проволокой без всякого участия клиньев,как, например, в якорях трамвайных моторов.
Коллектор. Диаметр коллектора обыкновенно принимается 50-у 80% диаметра якоря, в зависимости от величины машины. Меньший процент относится к большим машинам. Коллекторное деление
Фигура 55.
к
К
(Пк—диаметр коллектора, К—число пластин коллектора), но не делается меньше 4—5 миллиметров. Длина коллектора Lk определяется поверхностью охлаждения и длиной щеточных болтов; Lk можно вычислить по ф-ле:
Lk=(пь или пь + 1) (Ϊ, + I.), где щ—число щеток на щеточном болту, I,—длина щетки, L—расстояние между щетками. Нагревание коллектора не должно быть выше 59°, то есть темп-ра & j£50°.
Вычислив потерю VU от переходного сопротивления щеток и потери Wr на трение, можно проверить, соответствует ли полученная длина Lk коллектора условиям охлаждения коллектора, воспользовавшись ф-лой:
**=(704-120)
где vk есть окружная скорость коллектора. Коллектор, состоящий обычно из большого количества пластин с проложенной между ними слюдяной изоляцией, должен представлять собою правильный цилиндр, форма которого не должна нарушаться ни от действия центробежной силы ни под влиянием (°. Пластины коллектора должен быть стянуты с такой силой, чтобы слюдяные пластинки между ними держались трением и ни при каких условиях не могли выскакивать. Пластины коллектора изготовляются из твердотянутой меди. Общепринятая нормальная конструкция коллектора для окружных скоростей, не превышающих 30 м/ск, видна из фигура 56. Внутренняя сторона пластин имеет форму ласточкина хвоста и служит для закрепления па буксе. В корпусе буксы пластины коллектора изолируются слоем миканита, которому придают точную форму выступа буксы. Миканит изготовляется из
Фигура 56.
пластинок слюды, склеенных шеллаком или бакелитовым лаком. Букса, сжимающая кол-лекторные пластины, имеет форму двойного конуса с углами 30° и G°, вдающимися значительно во внутрь пластины, вследствие чего: 1) сокращается общая длина коллектора, 2) обеспечивается малое темп-рное расширение, 3) уменьшается поверхность, на которую действует изгибающим образом центробежная сила. Для быстроходных турбогенераторов применяются большей частью коллекторы значительной длины, иногда свыше 1 м, что является причиной заметного удлинения коллекторных пластин под влиянием повышения <°. Для предохранения от изменения цилиндрич. формы, вследствие действия центробежпой силы,коллектор стягивается двумя или несколькими стальными коваными кольцами, надетыми в горячем состоянии. Коллекторные пластины имеют на концах скосы, покоящиеся с одной стороны на переходном конусе вала, с другой—на конич. подвижной буксе, упирающейся через посредство пружины в укрепленное на валу кольцо. Т. о., коллекторные пластины, не теряя надежности и прочности закрепления, имеют возможность растягиваться под влиянием повышения ί°. Соединение концов элементов обмотки с пластинами коллектора производится путем впайки концов обмоток в вырезы пластин со стороны коллектора. В панцырной обмотке пластины соединяются с обмоткой при помощи особых лент а с прикрепленными к ним в одном конце обоймами Ь (фигура 57). Ленты для облегчения коммутации полезно делать с большим сопротивлением, т. к. увеличение сопротивления в короткозамкнутой секции уменьшает действие самоиндукции.
Магнитная цепь. При расчете воздушного зазора <5 в машинах без дополнительных полюсов принимаются во внимание как влияние большого зазора на устойчивую и спокойную работу машины, так и его отрицательное влияние на увеличение количества ампервитков, а следовательно и меди в обмотке возбуждения. Воздушный зазор для машин без добавочных полюсов может быть вычислен по формуле:
(1,2 +- 2)b;· AS- AW,
где 7cl—коэфф. проводимости воздушного зазора гладкого якоря в отношении зубцового (=1,1). Для машин с дополнительными полюсами, вместо коэфф-та 1,2—2, можно брать 14-1,2, то есть воздушный зазор можно значительно уменьшить. Подходящая магнитная индукция в сердечниках магнитов и ярме м. б. принята: для железа Вт=14 5004-10 500; для литой стали Вт =14 0004-10 000; для чугунного литья В,„=5004-7 000. Мень-
<5 =?·
шие значения относятся к машинам с добавочными полюсами и к мелким машинам.
Для соблюдения необходимой жесткости при больших диаметрах ярму приходится придавать довольно сложную систему ребер, чтобы увеличить момент инерции. Очень большие машины делаются, по транспортным соображениям, из двух частей. За последнее время на Западе и в СССР переходят от литых станин к сварным из листового железа, чем достигается значительная экономия веса. Наир., статор турбогенератора, изготовленный на ленинградском заводе Электросила из листового железа путем электрической дуговой сварки, дал 40% экономии в весе против чугунного статора. Магниты в машинах постоянного тока либо отливаются из стали или чугуна либо собираются из штампованных пластин динамной стали. Иногда только полюсные наконечники собираются из динамной стали и прикрепляются болтами к стальному сердечнику.
В тяговых двигателях сердечник главных полюсов собирается из выштампованных листов динамной стали.
Спрессованные листы сжимаются с торцовых сторон стальными пластинами, в которых высверлены отверстия для заклепочных болтов. В середину тела полюсаа вставлен железн. стержень. Полюс привертывается к корпусу двигателя помощыоболтов, пропущенных через отверстия в корпусе двигателя и внедренных в тело железн. стержня.
Обмотка возбуждения шунтовьιχ машин м. б. рассчитана из следующих соображений. Максимальная сила тока (1,„),тхвозбуждения при напряжении U на зажимах генератора и сопротивлении Rn всей обмотки, равняется
(I )=U
Vх тппах г>
Сопротивление П„ м. б. выражено ф-лой:
и w · In, (1 + 0,004^т)
Лп δ 700«
где W—число всех витков шунтовой обмотки, ί,„—проектируемая средняя длина одного витка в см, &т—среднее повышение 1° шунтовой обмотки против окружающей среды (15°), q—сечение провода. Из обоих этих ур-ий следует, что максимальное число ампервитков равняется:
1F=(Z„U-W= 5 700и-4
Фигура 57
(1 +0,004#„,)/м,
Из приведенной ф-лы можно сделать тот вывод, что, при данных напряжениях U на зажимах и при средней длине одного витка максимальное число ампервитков шунтовой обмотки не зависит от числа витков, а зависит только от сечения провода q. Сечение рассчитывается с нек-рым запасом по ф-ле:
_ /i ·, _2_ i о 4W I„i (1 - 0 0040,1,)
" - О’1 1>‘*7 6 700 и
Джоулевы потери Wn получаем из ф-лы:
w (1 + 0,004»„,) AW 1,„· а " » 5 700 ’
где s—плотность тока. Как можно усмотреть
| 1 0 С ю а- | Дл я продолжительно ii работы без дрожания | i о =
Но“3 |
|||||
| Род щеток | Удельное со тинление пр в 2 лш/м | Плотность тока в А /см“ | Падение нап ряжения в обеих щетках в V | Удельное нажатие в килограммах/слi* | Окружная скорость
В Л1/СК |
Коэффициен трения на к тактном кол | Область применения |
| Медная ткань.
Пластиночные, угольные с |
0,018 | 20—30 | 0,06 | 0,1 | — | 0,3 | 1 Для машин очень низкого напрл- |
| графитовой прослойкой. | — | 20 | 1,2 | 0,1 | — | 0,25 | 1 жени я |
| Бронзо-графитовые. | 0,8 | 25—30 | 0,4 | 0,15 | 25 | 0,15 | Контактные кольца нзтвердойброн-зы. Машины пост, тока до 6 V |
| Медно-графитовые. | 2 | 20 | 0,66 | 0,15 | 20 | 0,16 | Контактные кольца из бронзы и железа. Машины постоянного тока от 6 до 20 V |
| Высокографитовые мягкие | 18 | 12—15 | 1,5 | 0,1 | 45 | 0,17 | Контактные кольца |
| » » | 18 | 12—15 | 1,4 | 0,1 | 45 | 0,15 | Быстроходные машины постоянного тока и одно л норные преобразователи на ПО V |
| » » | 32 | 10—12 | 1,9 | 0,1 | 45 | 0,18 | Быстроходные машины постоммо-го тока н однолкорные преобразователи свыше lio V |
| Угольно-графитовые мягкие | 20 | 10—12 | 1,6 | 0,125 | 10—15 | 0,27 | Контактные кольца и машины постоянного тока на 110 V |
| J гольно-графитовые средние | 30 | 8 | 1,7 | 0,125 | 20 | 0,2S | Машины пост, тока на ПО—120 V |
| » » | 35 | 8 | 1,8 | 0,125 | 20 | 0,28 | Коллекторные машины переменного тока и машины постоянного тока повышенного напряжения |
| Твердые угольные. | 35 | 4—5 | 1,9 | 0,15 | 15 | 0,23 | 1 Машины напряжения свыше 500 V, |
| Очень твердые угольные. | 105 | 3—4 | 2,1 | 0,15 | 15 | 0,25 | ( склонные к искрению |
Таблица 3.—Щетки завода Электроуголь (с т. К у дико во, Московской губернии).
| Допускав- | |||
| Род щеток | Марка | мая плотность тока в А/см | Область применения |
| Угольные для постоялого тона твердые. | Т | 6—8 | Для трамвайных двигателей и динамома- |
| Средней твердости .. | шин высокого напряжения | ||
| 7 | 6 | Для динамомашин от 110 до 500 V и для | |
| двигателей, работающих без перегрузки | |||
| Угольно-графитовые для ноет, тона твердые | А | 8—10 | Специально для динамомашин от ПО до |
| Средней твердости .. | 440 V | ||
| А1 | 6—7 | Для машин среднего напряжения | |
| Графитовые для постоянного и перемен- | Для двигателей постоянного н перемен- | ||
| кого тока твердые.. | А2 | 12—13 | ного токов |
| Средней твердости .. | 12—15 | Для быстроходных машин, особенно для | |
| машин с добавочными полюсами | |||
| М пгкие | W2 | 12 | Для турбодииамо |
| Медно-угольные твердые.. | mi | 14—16 | Для машин переменного тока и машин |
| постоянного тока от НО до 220 | |||
| Мягкие | М4 | 12—15 | Для машин перем. и для машин пост, тока |
| в тех случаях, когда от щеток требуется небольшой коэффициент трепня | |||
| Медно-графитовые.. | мг | 25 | Для машин переменного тока с большим |
| числом оборотов | |||
| Медносетчатые.. | - | - | Для двигателей перемепиого тока |
| Фольговые | - | - | Длп машин переменного тока |
потери при данных ампервитках и средней длине обмотки прямо пропорциональны плотности тока. При выборе плотности тока исходят лишь из соображений допустимых температур нагревания обмоток, т. к. джоу-левы потери, особенно в мощных машинах, не играют большой роли. Среднее повышение температуры равняется
где Ст—эмпирический коэфф., а,,·—уд. поверхность охлаждения в саг на 1 W потерь,
ат=— Д4, (wh и wn—потерн от гистерезиса в сердечнике и полюсном наконечнике, Лт— поверхность охлаждения в cat2). Коэфф. С,„ составляет: для открытых машин -150—550, для машин с подшипниковыми щитами 5504-650, для защищенного типа машин (полузакрытых) 650-^750, для совершенно закрытых—1 300 и выше. Плотность тока s колеблется в границах от 1,2 до 2,5 А. В последовательной обмотке возбуждения сечение а= -ммг. Плотность тока может быть вычп-
’ S
слена, если известны средняя длина витка 1,пи джоулевы потери Wn, по ф-ле:
__5 700 · Wn_
5 “ (1 + 0,004»m) · ϊ-W-ln,
где XV—число всех витков последовательной обмотки. Плотность тока колеблется в сери-есных генераторах в пределах 14-1,7 A/aiat2, а в двигателях с перемежающейся нагрузкой (например, в трамвайных, железнодорожных, храповых)—2 4-3 А/мм2.
Обмотка возбуждения образуется или из круглой медной проволоки или из прямоугольной, наматываемой на ребро. Круглая проволока идет на намотку полюсных катушек, гл. обр., шунтовых машин, прямоугольная—на катушки вспомогательных полюсов и возбудительную обмотку последовательных машин. Изолированная медная проволока наматывается на особые гильзы, которые изготовляются либо из изолирующего вещества (пропитанного прессованного картона, изолита и тому подобное.) либо из жести. Гильза надевается на сердечник и удерживается на нем выступающими краями полюсного наконечника или особыми шпильками. Для лучшего охлаждения обмотки катушки делают б. ч. не толще 4—5 см. Иногда приходится под-Фигура 58. разделять ее на ча сти в поперечном или продольном направлении или и в том и в другом, чтобы увеличить площадь охлаждения (фигура 58). В закрытых трамвайных двигателях применяются катушки из изолированного медного провода прямоугольного или квадратного сечения. Катушки изолируются хлопчатобумажной лентой и пропитываются, сперва под вакуумом и затем под давлением, особой изолирующей (так называемой компаундной) массой, заполняющей все пустоты катушки, так что после осты
вания катушка представляет собою как бы сплошной монолитный блок. Компаундирование катушек делается с целью улучшения отдачи тепла и предохранения их от сырости. Катушка поддерживается на полюсе особыми металлическ. рамами, насаженными на полюсный баш С другой стороны между катушкой и внутренней поверхностью корпуса двигателя закладываются особые плоские пружины для амортизации ударов, происходящих от сотрясения вагона.
Щетки и щеткодержатели. Размер потребной поверхности щеток находится в прямой зависимости от плотности тока s„ на контактной поверхности. Чем выше выбранная плотность тока, тем лучше условия коммутации. Тем не менее приходится держаться извести, границ, во избежание чрезмерных потерь от переходного сопротивления щеток. Большая плотность тока в щетках имеет еще и то положительное значение, что с уменьшением поверхности щеток уменьшается трение. В табл. 2 и 3 приведены основные данные, относящиеся к наиболее употребительным щеткам для нормальных электрических машин. Значения падений напряжения в щетках для предварительных расчетов приведены в таблице 4. Щеткодержатели изгото-
Фигура 59.
Таблица 4.— П а д е н и я напря ж е и и я и к о Ητα и т а х щето к.
| Род щеток | Падение наи-рпж. на одном контакте(сред. знач. для гю-лож. и отрнц.) в V | Допуст. плотность в А/С.М* |
| Твердые угольные. Мягкие угольные.
Графитовые. Металло-графитовые. |
1,1
0,9 0,5—0,8 0,15—0,5 |
5—7
8—9 10—12 15—30 |
вляются из латуни и состоят из обоймы, закрепленной неподвижно на щеточном болту, и обоймы с гнездом для щетки. Обе обоймы связаны между собой регулируемой пружиной, которая нажимает в некоторых конструкциях одним концом непосредственно на щетку. Па фигура 59 н 60 изображены щеткодержатели харьковск. завода ГЭТ.
Первый ИЗ НИХ, ДЛЯ Фигура 60.
металлич. щеток, позволяет регулировать натяжение соединительной пружины поворотом неподвижной обоймы на известный угол; на втором регулирование достигается поворотом рычажка на храповике. Чтобы обеспечить твердое положение щеток, щеточные болты, на которые они насажены, закрепляются в щеточной раме, сидящей на неподвижной части машины. Болты изолированы от рамы, но
в то же самое время должен быть соединены между собой через один металлический проводник, что достигается при помощи собирательных колец, соединяющих щеточные болты одного и того нее знака. Собирательные кольца соединены гибкими проводами с зажимами машины. Если машина не имеет добавочных полюсов, то щеточная рама устраивается подвижной.
VII. Потери в Д. постоянного тока. Преобразование механической работы в электрическую в генераторе и электрической в механическую в двигателе сопровождается целым рядом потерь, вследствие которых часть работы бесполезно превращается в тепло. Все эти потери можно подразделить на следующие виды: 1) механические, 2) электрические, I!) магнитные, 4) дополнительные.
1. Механические потери складываются из потерь от трения в подшипниках, от трения щеток о коллектор и от трения вращающихся частей о воздух. Потери от трения в главных подшипниках могут быть определены по формуле (в W):
Р=9,81 -μ-Q vt,
где μ—коэфф-т трения, Q—давление в килограммах, и,—окружная скорость шейки вала в м/ск. Потери в шарикоподшипниках мол-сно вычислить по формуле (в W):
Ps 0,015 %ν,
где D—диаметр окружности через центры шариков. Потери на трение о воздух не поддаются точному вычислению. Потерн на трение щеток о коллектор могут быть вычислены по формуле (в W):
Р=9,81 · · Qh · Fh vk,
где коэфф. трения щеток. Qh—уд. нажатие щеток в килограммах/см1, F,—площадь поверхности соприкосновения всех щеток, vk—окружная скорость коллектора. Для медных щеток: е“=0,10 4- 0,30 килограмм,смг μ,=0,30 4- 0,35 ;
для угольных:
Qb=0,12 4- 0,15 килограмм см2; μ*=0,25 4- 0,35.
В тяговых двигателях удельное нажатие щеток примерно в два раза больше. По данным Иаршалн и Хобарта, общие потери от трения в Д. составляют: от 1 до 3% мощности при 400 — GO kW и 300—1 500 об м. в быстроходных н от 0,8 до 2% мощности при 500 — 50 kW в тихоходных машинах.
2. Электрические потери слагаются из джоулевых потерь в обмотках якоря и возбуждения, потерь от переходного сопротивления щеток и добавочных в обмотке якоря от токов Фуко.
3. Магнитные потери бывают: на гистерезис и на токи Фуко. Потери на гистерезис Ph м. б. вычислены по формуле Рихтера:
р, ^ а 1 Впш^ -и В ‘ — ί-1’-"!*) W/кз * loo lu ооо 1 ίου ιυ ооо ’
где а и /1—коэфф-ты, зависящие от качества динамной стали, /—частота тока в пер/ск. Потери на токи Фуко Р„ в машинах пост, тока м. б. вычислены по ф-ле:
Р»= βΐ(δ · .ос · щооо) W/«S
где ρ—уд. сопротивление листовой стали в миллиметров2/м, <5—толщина листовой стали в см.
4. Дополнительные потери. Кроме рассмотренных, имеется целый ряд добавочных потерь, не поддающихся точному учету ни теоретическ. ни экспериментальным путем. Согласно нормам VDE, ко всем подсчитанным потерям предлагается добавлять известный процент для учета этих дополнительных потерь. Для компенсированных машин постоянного тока установлено 0,5%, а для остальных 1%. Кпд у динамомашип постоянного тока определяется как отношение отдаваемой мощности к получаемой, причем получаемая мощность составляется из отдаваемой плюс потери.
VIII. Предельные мощности Д. постоянного тона. Они определяются максимально допустимыми границами как механич., так и эле-ктрич. прочности материалов якоря и коммутатора. Подставляя в ф-лу, выражающую мощность на каждую пару полюсов,
А _ AS-ek-v V ~ 20
предельно допустимые величины для: линейной нагрузки якоря HS=700, окружной скорости якоря V — 80 м/ск и напряжения между смежными коллекторными пластинами ек =25 V, при компенсационной обмотке и добавочных полюсах, получаем (при частоте токα= ад =50) отношение ~ приблизительно равным 1 400 kW на пару полюсов. Видоизменив ту же ф-лу, получим произведение из мощности N на число оборотов п: Nn=3HS ск v.
Подставив предельные величины, имеем: Nn =4,2 · 106.
Т. о., при числе оборотов п, изменяющемся от 4 200 до 100, имеем:
Nmax=1 000 4- 42 000 kW.
Обычно Nn— 1,05-106, так как напряжение между пластинами коллектора принимается в 10—14 V, линейная нагрузка якоря AS==3004-500, v=50 м/ск. Вышеуказанные формулы действительны для обычно применяемой петлевой обмотки, в которой отношение числа пар полюсов к числу параллельных
Р
ветвей =1.
а
Величина н а п р я ас е н и я на зажимах в Д. пост, тока ограничивается допустимыми напряжениями между смежными пластинами коллектора и м. б. вычислена по ф-ле:
где vk—окружная скорость коллектора в м /ск, tk—коллекторное деление в м. Принимая =50 пер/ск., /*.=0,005 м, г>*=30 м/ск, с“ 20 V, получим U= 1 200 V. Выбирая меньшее число оборотов при данном количестве полюсов 2Р, то есть уменьшая частоту тока /, можно рассчитать Д. на большее напряже-ние. Так, папр., для двухполюсных машин (2Р=2), принимая вышеуказанные предельные данные, получим для различных значений частоты тока и соответствующих им оборотов следующие максимальные напряжения па зажимах динамомашины:
= 50 25 10 5 пер/СК.
п= 3 000 1 500 600 300 Об/М.
V=1 200 2 400 6 000 12 000 V
В настоящее время генераторы пост, тока высокого напряжения для радиоустановок строятся в 10 000 V и выше. В свое время Тюри (Thury) построил машину пост, тока с вращающимся индуктором и вращающимися, щетками напряжением в 25 000 V, поместив между пластинами коллектора конденсаторы, предназначенные для тушения образующихся вольтовых дуг. Для ж.-д. двигателей применяются пока напряжения до 1 500 и 2 000 V, рассчитанные на прочность изоляции при последовательном соединении двух двигателей на 3 000 и 4 000 V. Обычно такие двигатели, кроме дополнительных полюсов, снабжаются также компенсационной обмоткой.
Исходя из механич. прочности машины, можно было бы снимать с одной пары полюсов значительно бблыную мощность, нежели это позволяют максимально допустимые при настоящем состоянии техники электрич. напряжения материалов. Ограничение мощности, снимаемой с одной пары полюсов Д. пост, тока, по соображениям механич. прочности, м. б. вычислено по следующей формуле (на пару полюсов):
= -Λ-7 · Ь- · В, AS · I ν- IO-3 kW. р ю.-и г 1
Приняв=0,7; Б,=8 000; .AS=500, v —=80 м/ск, ί=1 .и, — получаем (на каждую пару полюсов, при=50):
-v s4 000 kW.
р
Наиболее мощные Д. постоянного тока были выполнены фирмами AEG. SSW, ВВС и GEC. Примером могут служить двигатели для прокатных станов, мощностью 0 500 kW с п=50-|-150, допускающие мгновенные перегрузки до 24 000 kW. Эти двигатели снабжены двумя коллекторами и имеют напряжение на зажимах: 20-полюсные± 1 200 V и 24-нолюсныег 1 500 V. Соответствующие пусковые генераторы имеют мощность 7 000 kW при напряжении 700 V и п= G00. Вертикальные генераторы, непосредственно соединенные с водяными турбинами, существуют мощностью 4 300 kW, напряжением от 170 до 350 V, при »»=500. Для электролитических целей построены генераторы на 20 000 А при 140 V. По предложению проф. Петерсена AEG строит мелкие генераторы постоян. тока, мощностью 0,3—4 kW, соединенные с водяными турбинами без регулятора скорости, так что число оборотов генератора по мере падения нагрузки увеличивается примерно на 80%. Применением компаундной обмотки возбуждения достигается постоянство напряжения на зажимах при всяких числах оборотов.
IX. Производство Д.постоянного тока в СССР. Производство динамомашин постоянного тока в ССС Р сосредоточено на следующих заводах ГЭТ. На Харьковском электромеханическом заводе сосредоточено производство всех нормальных машин постоянного тока свыше 0,25 до 100 kW мощности, а равно изготовление индивидуальных машин постоянного тока для шахтных подъемников, прокатных станов, регулируемых двигателей и пусковых генераторов, вольтодобавочных аггрега-тов, уравнительных машин, прокатных двигателей по схеме Кремера, генераторов с делителем напряжения по системе Доливо-Добровольского, двигателей - генераторов, генераторов низкого напряжения для электролитических целей и т. д. На заводе Динамо в Москве ведется производство тяговых трамвайных и ж.-д. двигателей, генераторов для освещения поездов типа Розенберга, маломощных турбогенераторов для освещения поездов, аккумуляторных тележек (электрокаров), а также производство электрооборудования для тяговых двигателей и подвесного трамвайного и ж.-д. материала. В ближайшее время на з-д Динамо будет перенесено с Харьковского завода производство крановых двигателей постоян. тока и крановой аппаратуры, а с завода Электрик—машин высокой частоты и высокого напряжения пост, тока. На заводе Электрик в Ленинграде сосредоточено производство сварочных аггре-гатов трех величин: на 200, 300 и 600 А. 3-д Электросила в Ленинграде изготовляет те же Д., мощностью свыше 100 kW, что и Харьковский з-д, а нормальные моторы до 100 kW строит з-д Вольта в Баранче (Урал).
Заводами ГЭТ в последние годы построен ряд машин, в которых учтены все новейшие достижения западной техники в этой области. Путем применения добавочных полюсов, компенсационных обмоток, вентиляционных устройств и т. и. этим з-дам удалось построить ряд машин с максимальным использованием материалов в электрическом и механическом отношениях при высоких кпд и надежности в работе. Из мощных машин пост, тока, построенных Харьковским з-дом, можно отметить несколько генераторов длительной мощности 2 250 и пиковой— 4 500 kW, при 10 полюсах и 500 об/м. Двигатель типа D.VI-la, изготовленный заводом Динамо для Московского трамвая, развивает часовую мощность 55 kW, при напряжении 550 V и 650 об/м. Для электрификации Северных ж. д. разработан тем же з-дом тип ж.-д. вептилированного двигателя с неразъемным корпусом, мощностью 150 kW для работы под напряжением 1 500 V (два двигателя в серию по 750 V). Первые выпущенные двигатели этого типа дали при испытании вполне удовлетворительные результаты.
Общий выпуск (вместе с предполагаемым на 1932/33 г.). Д. пост, тока на з-дах ГЭТ выражается следующими цифрами:
Годы
Мощи, до 100 kvv
Общ. Мощи, свы- Общ. мощи, ше 100 kW мощи.
1926/27. 4 100 ШТ. 4I 000 kW 24 шт. 4 600 kW
1927/28. 2 900 » 82 000 » 47 » 10 000 »
1932/33. 12 000 > 120 000 » 350 » 36 000 »
Все необходимые материалы для производства Д. пост, тока изготовляются в СССР. Дпнамнап сталь поставляется Верхне-Исетсиим заводом, обмоточный провод—кабельными з-дами ГЭТ, угольные щетки—· заводом Элоктроуголь ГЭТ.
Лит.: Ш е к ф е р К. И. Динамомашнпы пост, тока, ч. 1 и 2, М.—Л. 1927; В о р о н о в Λ. А., Динамоэлсктрич. машины пост, тока, .4., 1924; Т о л-в и н с к и и В. А., Электрич. машины, ч. 1 Машины пост, тока, Л., 1925; К у р 0 а т о в С. И., Электрич. машины ноет, тока, М.—Л. 1928; К о п и я е в II. II., Электрич. машины постоянного тока, Харьков, 1926; И у л е б а и о н В. С., Испытание электрических машин п трансформаторов. Si.—Л., 1928; Люст Г. А., Электрические машины постоянного тока, Ленинград, 1926; Arnold К. — La Сонг .1., Die GleiOhStrom-inasciiine, В. 1—2, Berlin, 1923—27; Richter R., Elektrlsche Slaschlnen, В. 1, В., 1924; W a 1 k e г M., Specifications a. Design of Dynamo-Electrical Machinery, London, 1925. M. Владос.