 > Техника, страница 45 > Жатвенные машины
> Техника, страница 45 > Жатвенные машины
Жатвенные машины
Жатвенные машины, c.-x. орудия для механизации уборки хлебных злаков и полевых трав. Существенною частью Ж. м. служит режущий аппарат, состоящий из ряда треугольных стальных сегментов а с двумя отточенными краями (фигура 1),
Jf а
О ОО О
Фигура 1. Фигура 2.
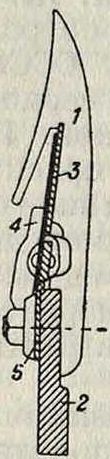
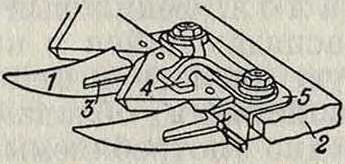
приклепанных к стальной полосе, так называемым спинке ножа b. Получаемая т. о. ножевая полоса вставляется в особые пальцы 1 (фигура 2 и 3), укрепляемые посредством болтов на пальцевом брусе 2. В пальцы врезаны пластинки (вкладыши) 3, укрепленные в них заклепками; края вкладышей имеют насечку, как у серпа, для удерживания захваченных стеблей при срезывании их ножевой полосой. Ножевые сегменты плотно прижаты лапками 4 к вкладышам, для того чтобы при резании не происходило сминания стеблей; сзади ножевая полоса упирается в особые пластинки 5, называемые пластинками трения.
Ножевая пластинка получает колебательное движение от кривошипного механизма и в то же вре-Фигура з. мя участвует в поступательном движении вместе со всей машиной. Если принять, что поступательное движение совершается равномерно, а колебательное есть гармоническое движение, то есть такое, в котором ускорение колеблющейся точки пропорционально отклонению точки от ее
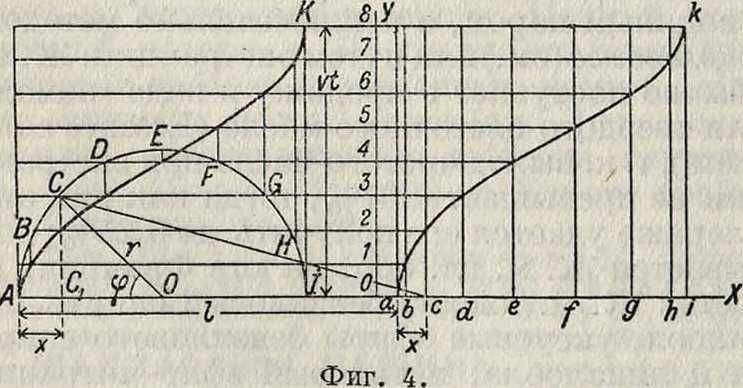
среднего положения, то в результате сложения этих двух движений каждая точка ножевой пластинки, а следовательно, и ее лезвия, пробегает путь АК по некоторой синусоидной кривой (фигура 4); в дей
ствительности, вследствие того, что шатун имеет не бесконечно большую, а ограниченную длину и — что центр- вращения кривошипа лежит не в средней плоскости движения ножей, а выше, колебание ножа совершаться будет не по простым, а по сложным гармоникам.
Для построения пути движения ножа надо провести полуокружность радиуса О А, равного длине кривошипа; разделив полуокружность на равные части, например, на 8 частей, получают точки А, В, С, D, Е, F, G, Η, I; затем, сделав засечки на продолжении диаметра AI радиусом Сс, равным длине шатуна, и приняв это направление за ось х, получают соответственно точки а, Ь, с d, e, /, g, ft, г, в к-рые, при каждом повороте кривошипа на угол ~=22°30, будет пере-
8
ходить данная точка пОжевой полосы (при условии, что машина стоит на месте). При поступательном равномерном движении машины с некоторой скоростью V надо отложить перпендикулярно к оси х расстояние vt (по оси у), соответствующее продвижению машины вперед за время полуоборота кривошипа t. Разделив этот отрезок па 8 равных частей, проведя из точек 1, 2, 3, 4, 5, 6, 7 и 8 линии, параллельные оси АХ, и восставив из точек а, Ь, с и т. д. ординаты получают точки пересечения, соединение которых дает кривую движения для любой точки ножа aft.Если найти точки пересечения горизонтальных прямых с соответствующими вертикальными, проведенными из точек А, В, С и т. д., то получим синусоиду АК, которая будет относиться к случаю бесконечно длинного шатуна, когда колебание является простым гармоническим. Передвижение по оси х проекции точки, бегущей по окружности, определяется след, обр.: если кривошип О А повернулся в положение ОС на угол <ρ=ωί, то отрезок АС, пройденный проекцией точки С, будет равен x=r( 1 - cos ωί); отрезок же, пройденный концом шатуна или (что то же самое) ножевой пластинкой, можно с достаточной для практики точностью выразить в общем виде так:
Τ’3
x1=r(l - COS ωί) —Sin2coi => г где l—длина шатуна и г—радиус кривошипа. По-
_7°2
правка на длину шатуна ψ— sin2ωί с изменением угла меняется от нуля до нек-рого максимума и затем снова падает до нуля; чем меньше в машине отношение -, то есть чем больше длина шатуна, тем меньше эта поправка, и тем более движение приближается к гармоническому. Например, для косилок имеются следующие поправки: Диринга—0,75 sin1 ωί, Массей-Гарриса—0,61 sin1 ωί, Адрианса—0,45 sin1 ωί; для жнеек: Диринга—1,40 sin1 ωί, Массей-Гарриса— 2,20 sin1 ωί, Мак-Кормика—2,00 sin2 ωί. Но в общем отклонение кривой движения ножевой пластинки мало отличается от синусоиды, а потому часто строят синусоиду А К вместо кривой ak.
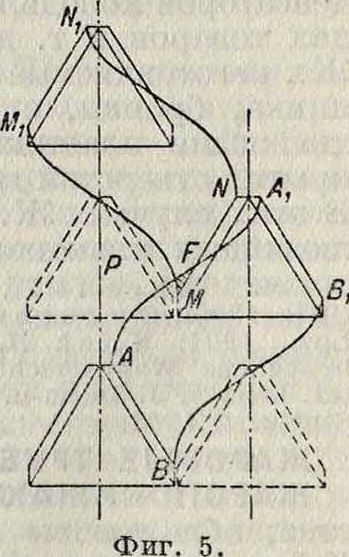
Если построить путь за время движения ножа вправо и влево, то получится схема, изображенная на фигуре 5. При движении вправо лезвие АВ срезает площадку AAiB1B, ограниченную двумя прямыми АВ и и двумя синусоидами AAtи ВВ1, а при движении влево лезвие MN срезает площадку ΜΜ,Ν-lN.
Из схемы видно, что площадки ΑΑ,Β-β и ΜΜχΝ,Ν дважды перекрывают площадку F, и, следовательно, на ней происходит двойной срез при движении ножа вправо и влево, тогда как площадка Р совсем не покрывается, и здесь стебли м. б. срезаны, только будучи наклонены вперед к площадке ΜΜ,Ν-,Ν. Очевидно, что при более быстром колебательном движении но-
COS ωί qp—sin!cui
)·
жа площадки Р уменьшаются, а площадки двойного среза F увеличиваются, а при более медленном—наоборот. Однако, по мнению некоторых исследователей (Горячкин, Крамаренко, Нахтве), отрицательное значение площадок Р не имеет большого значения, т. к. здесь происходит отгиб стеблей; притом отгиб стеблей влечет за собою косой срез стебля, что, как показывает практика, даже облегчает работу машины. Что касается площадок F, то они являются вредными, т. к. нож бесполезно вновь перерезает уже срезанные стебли и обрезки засоряют пальцевый брус.
Угол наклона лезвия ножа по отношению к направлению движения делается различный. Проф. Горячкин дает зависимость между величиной этого угла а, скоростью поступательного движения машины v и линейной скоростью вращения кривошипа юг в виде формулы:
tg а ^ —,
где ω—угловая скорость кривошипа и г— его радиус.
Ф-ла выводится след. обр. Абсолютное движение ноша слагается из: 1) относительного движения от кривошипа вдоль пальцевого бруса и 2) поступательного движения пальцевого бруса вместе с машиной. Первое дает перемещение x=r (1 -cos cot) со скоростью
и = ~тг=гео sin cot ; at
dy
второе дает перемещение y=vt со скоростью v=^ · Абсолютная скорость
"V (9,+(9‘-
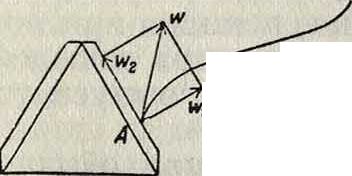
имеет направление под изменяющимся углом к лезвию (фигура 6) и м. б. разложена на две скорости: —с к-рой нож перерубает стебли, и ·νν2·—с которой нож перерезает стебли скользящим движением (перепиливает); ^ эта скользящая скорость изменяет свою величину и может иметь нулевое или отрицательные значения. Нулевое значение нежелательно; поэтому криво-Фигура 6. шипу надо придать такую скорость, чтобы она переходила через нуль только один раз или, еще лучше, не достигала его. Эта скорость равна
•w2=VCOS а - cor Sin asm φ,
где φ—угол, образуемый касательной к синусоиде с направлением движения машины. При w2^0
V COS a - (ОГ Sin a sin φ ^ 0,
Ό
откуда tg a ^ : ·
corsm φ
Правая часть неравенства получает наименьшее знает: V
чение при угле <Ρ=γ, следовательно, tg — ·
По данным Нахтве, для америк. машин, при υ=1 м/ск:
для косилок.. а=20—48°; tor=1,375—1,95 м/ск для жней.а=31—87,5°; а>г=1,1 —1,3 »
для сноповязалок. а=31—48°; сог=1,1 —1,5 »
Горячкин дает:
ДЛЯ КОСИЛОК.. 0=27—46°
для жней..a=37—42°
для сноповязалок.. a=33—42°
По испытаниям автора, при v — 1 м/ск, угол αί 21°43, и по измерениям для косилок он оказался равным 28—32°.
Для определения наивыгоднейшей угловой скорости кривошипа, обусловливающей
соответствующую скорость ножа, Горячкин дает следующую формулу:
Г Ε·ύ··»·Α
V 2 ’ (-г -з со2=-
• Smy2
где Е—модуль упругости стебля, П—диаметр стебля, δ—толщина стенок стебля, А— стрела прогиба на высоте срезания стебля I, bту“—’Момент инерции стебля и г— радиус кривошипа.
Отсюда следует, что: 1) число оборотов, а следовательно, и скорость ножа, должен быть больше для мягких стеблей травы; 2) скорость ножей, пробегающих два промежутка между пальцами (в сноповязалках), должен быть меньше; 3) число оборотов должен быть тем больше, чем толще стебли; 4) число оборотов должен быть тем больше, чем выше подрезается стебель;
5) число оборотов должен быть тем больше, чем легче колосья.
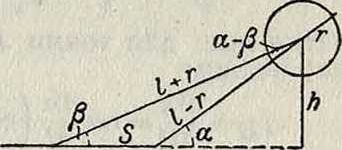
Длина пробега ножевой пластинки S более двойного радиуса кривошипа 2 г вследствие того, что центр кривошипа находится выше средней плоскости движения ножей на некоторую величину h; т. о., ширина пластинки, а также и расстояние между центрами сечений пальцев должен быть меньше 2 г; при стандартной величине S, радиус кривошипа должен быть менее-· Геометрические соотношения между величинами S, г и h м. б. получены из следующих уравнений (фигура 7);
S__l-hr _ I - г
sin(a—/3) — sin a ~ sin /3 ’
Фиг.
Sin а
h=(l + r) sin β — (l — г) sin a,
S— V(I + r)2 - h* - JZ(T-
(2)
r)2 - ha, (3)
где l—длина шатуна, a и β—углы наклона шатуна в мертвых положениях кривошипно-шатун. механизма.
Из ур-ий (1) и (2) получается: h.«ln(« — β) sma-sm/3
то есть, чем больше высота расположения оси кривошипа, тем больше пробег ножа; в косилках он значительно больше, чем в жнеях, т. к. пальцевый брус последних движется на большей высоте над землей и h соответственно меньше. Из ф-л (3) или (4) определяется величина пробега пластинки в современных машинах. Из ур-ия (3) можно получить проектируемый размер радиуса кривошипа г по данной величине пластинки S:
-W
4Ϊ2 — ih2— S2
U‘-S‘
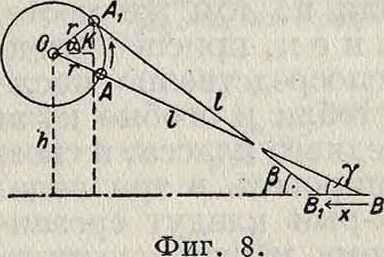
Аналитическое определение сил инерции кривошипно-шатунного механизма Ж. м. В виду того, что центр кри-ι вошипа О (фигура 8) находится на высоте h над ножевой полосой, перемещение х точки В может быть определено из следующих соотношений:
х=(г + 7) cos γ — l cos β —г cos a,
7«=r sin a, h=(r + l) sin γ,
7c + 7t=Ϊ sin β,
где l—длина шатуна, r—радиус кривошипа.
Из этих ур-ий определяем перемещение х:
,/-, /~ (т sin a + h z
X=V (r -f l)2 - hz - r COS a-ly 1 - I---J,
или, разложив подкоренное выражение второго корня по биному Ньютона, получим:
С= У (г+1)2
7ι2 -rh
h2
2i2
)·
21* V-
при чем пренебрегаем третьим членом разложения по
(ϊΗ*=
его малости, т. к., например, для косилок, при отношении г 1
-=0,04 и sin α= 1, численное значение -I 8
= 0,00000032. Перемещение точки В:
Χβ=У (г + 1)г -h--r cos α - I +
r2 Sin2 a
1 21
Скорость точки В
dx da
rh. h2
-Tsma + ^r
VB =
dt
dt
^ .Sin a H
— Sin 2 a + у COSa
)
если принять, что угловая скорость кривошипа noda
стоянная, то есть -гг=«>, то: dt
VB
Sin a + Sin 2 a + у COS
Ускорение для точки В получится после дифференцирования:
d2x
Ж2 =
da.
dt
[ COS a +
COS a + у COS 2 a -
- COS 2 a - у Sin a
Sin =
пренебрегая членом у cos 2 a в виду его малости, получим:
ίβ=τω2 ^COS a -
Следовательно, сила инерции для точки В
гг, ,
Т=mrar
sm
·)
! ^ COS a - J sin
Величина сил инерции довольно значительна; например (для косилок), при скорости ножа vB =+2,5 м/ск и ускорении Зд=±180 м/ск2, сила инерции на ноже Тв=bbкг·, сила инерции на пальце кривошипа ТА =110 килограмм;последняя раскладывается на центробежную (до НО кг) и тангенциальную (до 45 килограмм). Работа сил инерции от качающихся масс ножа и части шатуна, равная за полный оборот пулю, в течение Vi. оборота м. б. выражена ф-лой:
L=S
771 СО2×dx =
mar г2
I ω2 2
или в единицах мощности:
N =
Ιω2
.(*i =
Λβο;
4 nma>sr3
= 0,00045 m»! пгг IP.
Работа сил инерции от горизонтально движущихся масс, напримерв косилках,—от 0,75 до11Ри от вертикально движущихся масс—от 0,2 до 0,4 Я?.
Виды Ж. и. Машины для уборки хлебов и трав можно подразделить на два главных класса; 1) косилки, которые оставляют срезываемые ими стебли на том же месте, где они росли, и 2) ж н е и, приспособленные к тому, чтобы непосредственно после срезывания собирать стебли в особые кучи или снопы. Ж. м. последнего класса, в свою очередь, можно сгруппировать в три вида:
а) лобогрейки, которые кладут срезанные стебли на платформу машины, откуда они сбрасываются в виде снопов вручную,
б) жнеи-самосброски (грабельные), которые автоматически складывают снопы на землю, и в) сноповязалки, которые, кроме того, связывают снопы шпагатом. Особняком нужно различать особые машины (х е д д е р ы), которые собирают лишь одни колосья, и жн е и-м о л о т и л к и и стрипперы, которые на месте же и молотят срезанные колосья.
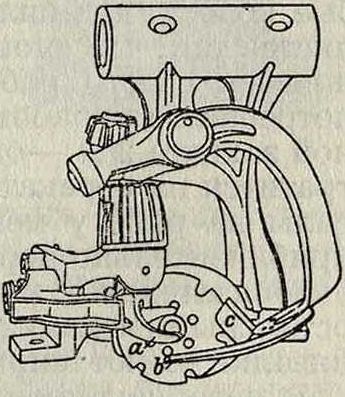
I. Косилки. Эта группа жатвенных машин применяется для срезывания травы и полеглого хлеба. Устройство косилки изображено на фигуре 9: рама 1 опирается на два ходовых колеса 2 и для запряжки имеет дышло 3; к основной раме при помощи шарнирных тяг 4 присоединяется пальцевый брус 5, в к-ром скользит нож (к о с а) б, приводимый в движение от шатуна (косогона) 7. Для отодвигания срезанной травы имеется доска 8, снабженная пй. Близ сиденья для рабочего 9 расположены рычаги для подъема
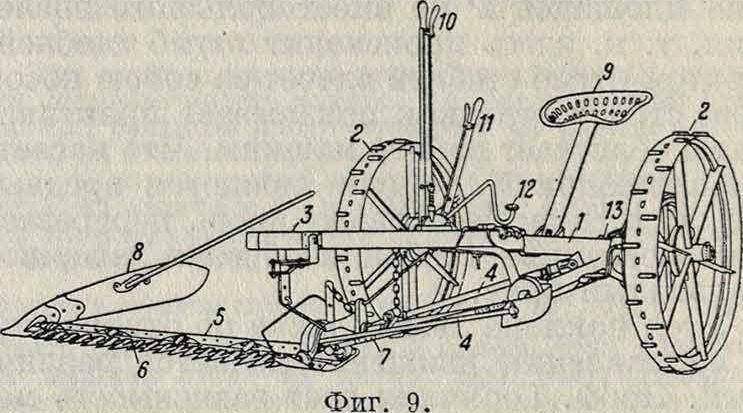
пальцевого бруса 10 и для наклона пальцев ii, а также педаль 12 для подъема бруса и педаль 13 для включения механизма. Пальцевый брус опирается на два башмака, имеющие внизу стальные полозки, которыми они скользят по поверхности почвы. Этими полозками можно регулировать расстояние бруса и режущего аппарата от земли. Баш
маки должны всегда прилегать к земле и скользить по ней, следуя всем неровностям и придавая брусу соответствующее положение. Для осуществления подвижности пальцевого бруса относительно основной рамы имеются необходимые шарнирные соединения. При работе косилки, кроме установки полозков, надо дать соответствующий наклон пальцам помощью рычага наклона. Для приподнимания бруса над землей служат рычаг наклона и педаль; первый применяется при переезде косилки с одного места работы на другое, вторая же— во время самой работы, когда встречается какое-нибудь препятствие, а также при поворотах, заездах или осаживании лошадей назад, так как при этом нельзя выпускать вожжей из рук.
Двигающий механизм косилки обычно состоит из двух пар зубчатых колес и кривошипной передачи; кроме того, имеются храповой механизм для автоматического включения и выключения передаточного механизма и сцепная муфта для включения и выключения от руки или педалью. Ходовые колеса косилки снабжены рифами (выступами), во избежание скольжения, так как работа ножей зависит отвращения колес. Опыт показывает, что проскальзывание колес все же составляет ок. 5%. Устройство храпового механизма в ступице колес видно из фигура 10. Благодаря этому устройству, при движении косилки назад (осаживание лошадей), механизм разобщается от ходовых колес. Число собачек в храповом механизме бывает различного каждый раз включается в работу только одна из них; по б. ч. ставится лишь по три собачки, и в таком случае при сцеплении одной собачки с зубом другая будет находиться от зуба на расстоянии 1/, ширины зуба, а третья—
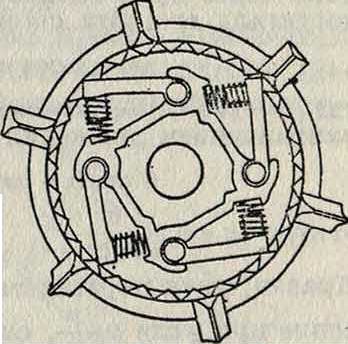
Фигура ю. на 2/3. Такое расположение собачек необходимо для более быстрого включения механизма ножа во избежание забивания пальцев травой.
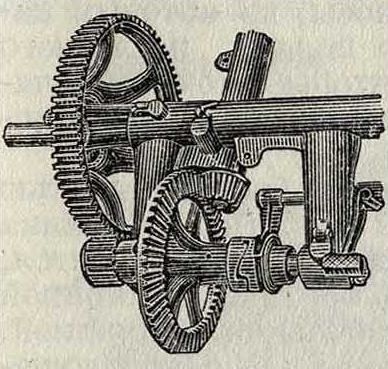
Зубчатые колеса (фигура 11) ставят обычно в количестве двух пар: одной—цилиндрической и другой—конической; постановка третьей пары вызывает лишнее сопротивление и потому теперь не применяется. В первой паре обыкновенно имеются цилиндрич. зубчатки, а во второй—конические; такая постановка предпочтительнее. Цилиндрич. зубчатки м. б. с внутренним зацеплением (Диринг, Осборн, Адриане, Вуд) или внешним (МакКормик ,Массей-Г ар-рис); внутреннее зацепление более плавно и прочно, но сильнее засоряется, чем внешнее. Зубчатая передача в косилках делается ускорительная; передаточное число, то есть число, показывающее, сколько оборотов сделает последняя зубчатка (и кривошип) на один оборот первой зубчатки (и ходового колеса), для косилки Диринга составляет:
Фигура н. г =
Z.-Z,
Za · Zi 12 · 12
= 26,51,
а для косилки Мак-Кормика:
67 · 55 кп
г=7Л7Т„=20,59.
Т. о., на один оборот ходового колеса кривошип делает 26 оборотов, а нож—26x2=52 хода; при скорости движения лошади 1 м/ск, ходовое колесо, имеющее в среднем диаметр 0,8 м, делает один оборот в 2,5 ск. а число ходов ножа в 1 ск. составляет ок. 21, или 600 000 ходов за 8-часовой рабочий день; при скорости трактора в 1,25 м/ск, получается в день 750 000 ходов.
Для включения и выключения механизма на ходу косилки вперед ставят сцепные муфты различной конструкции. Сначала в косилках Диринга, а затем и в большинстве других, было введено автоматич. выключение механизма при подъеме пальцевого бруса. Автоматич. выключение важно потому, что при поднимании пальцевого бруса без выключения механизма, последний продолжая работать, может вызвать поломку шатуна.
Кривошипный механизм передает движение из плоскости вращения кривошипа в плоскость движения ножа. Плоскость вращения кривошипа не во всех косилках имеет вертикальное направление; в косилках типа Мак-Кормика, Новь, Круппа, Дейтше-Верке она составляет угол с вертикальной плоскостью, в косилке же Диринга она почти вертикальна. Плоскость движения ножа (перпендикулярная к средней плоскости ножевых сегментов) не может быть горизонтальна, так как пальцейый брус устанавливается под различными углами к горизонту. Поэтому кривошипный механизм в косилке является не плоским механизмом, как, например, в жнеях или в паровых машинах, а пространственным; пространственный механизм должен состоять из семи шарниров, в отличие от плоского, где достаточно четырех шарниров. По схеме кривошипного механизма, представленной на фигуре 12, один шарнир (соединение с пальцевым брусом) заменен ползуном; следовательно, получаются для плоского механизма три шарнира А, В и С и один ползун D. В пространственном кривошипном механизме один шарнир также заменен ползуном D, другие два шарнира, соединяющие шатун с
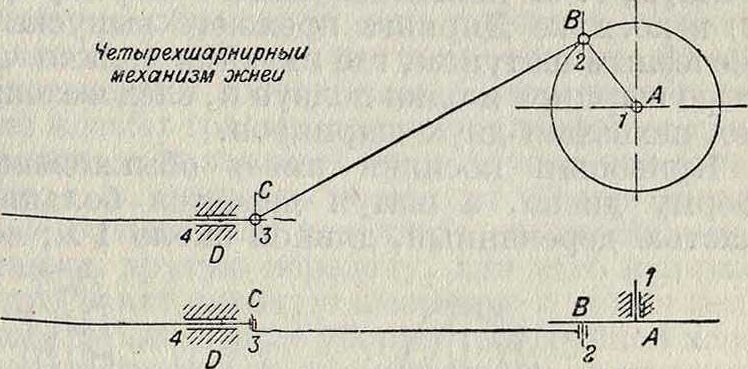
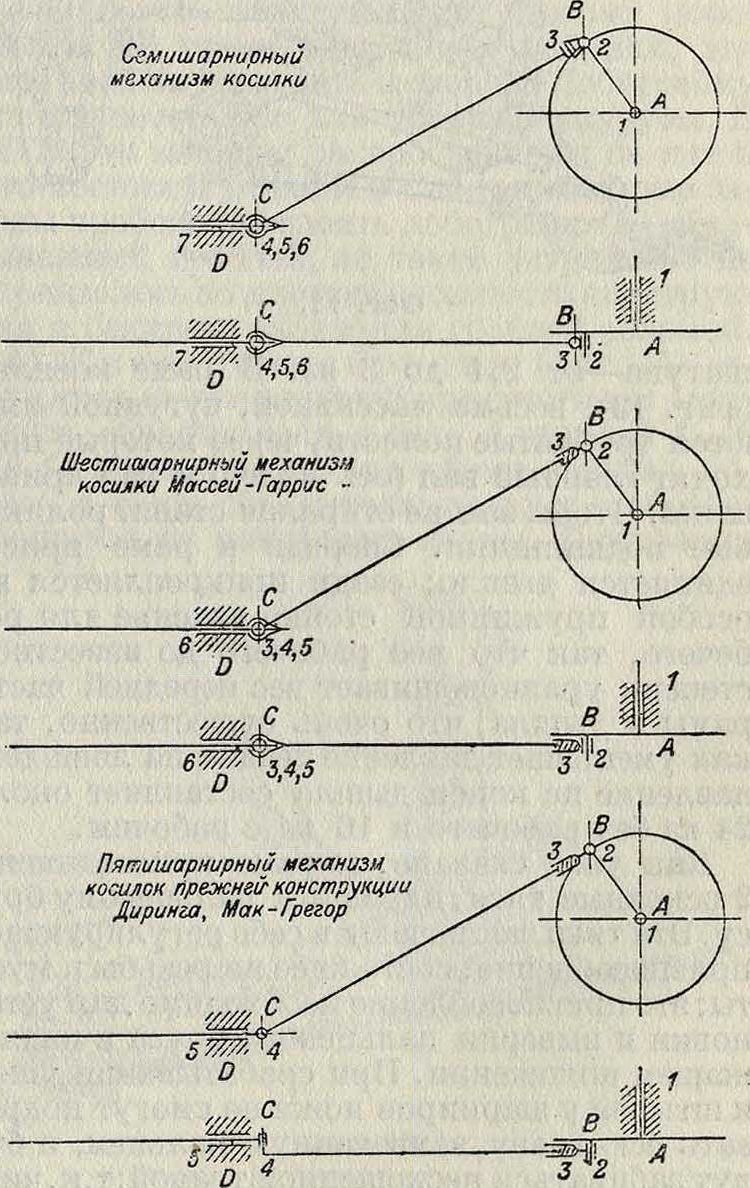
Фигура 12.
кривошипом и ножевой полосой, должен быть усложнены для обеспечения достаточной подвижности в шарнирах при выходе шатуна из плоскости вращения кривошипа, с одной стороны, и из плоскости движения ножа,— с другой. Для этого необходимо и достаточно было бы поставить вместо простых шарниров шарниры Гука (Кардана) в точках В и С. В точке В так обыкновенно и делается, то есть здесь имеется соединение двух шарниров—т. н. карданов подвес (смотрите), но при соединении шатуна с ножом в точке С такого шарнира было бы недостаточно, т. к. шатун при выходе из одной плоскости в другую,
кроме того, еще скручивается; поэтому в направлении длины шатуна должен быть поставлен дополнительный шарнир, или, другими словами, вместо шарнира С надо поставить три шарнира. Всякое отступление от схемы семишарнирного механизма вызывает неправильную работу механизма и влечет износ отдельных частей. Исключение из этого правила допущено: 1) в косилке Массей-Гарриса, где поставлено пять шарниров и один ползун, то есть нехватает одного шарнира, и 2) в косилке Диринга прежнего выпуска с железным шатуном, где имеются только четыре шарнира и один ползун и, следовательно, нехватает двух шарниров.
Кривошип косилки имеет обыкновенно форму диска, а шатун делается большей частью деревянный, длиной около 1 м; вес
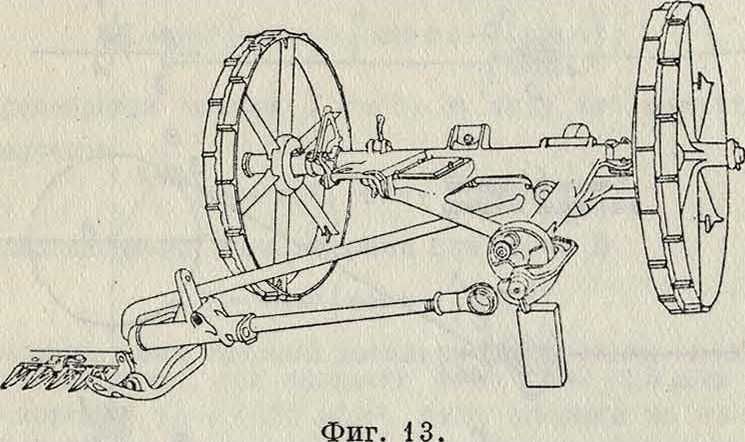
шатуна—от 2,4 до 3 килограмма. В раме косилки (фигура 13), весьма массивной, чугунной имеются трубчатые полости, через которые проходят главный вал (ось колес) и вал кривошипа. Чтобы вал не стирался ставят роликовые подшипники. Спереди к раме присоединяется дышло; сзади прикрепляется на особой пружинной стойке сиденье для рабочего, так что вес рабочего до известной степени уравновешивает вес передней части рамы и дышла, что очень существенно, так как уменьшает давление дышла на лошадей: давление на конец дышла составляет около 24 килограмма без рабочего и 16 килограмм с рабочим.
Как уже сказано, к раме присоединены 2 основные тяги, идущие к пальцевому брусу. Эти тяги заключают в себе регулирующее приспособление, состоящее из резьбы и муфты; это приспособление необходимо для установки и выверки пальцевого бруса в надлежащем положении. При срабатывании ушек и штырей у шарниров ножи не смогут подрезать всю траву, захваченную пальцем, и будут забиваться нескошенной травой;т.к. число пальцев ок. 20, то при этом получается довольно значительное сопротивление, механизм косилки испытывает сильные толчки (около 10 в ск.), что отзывается на прочности механизма и в таких случаях обыкновенно ломается шатун или разрывается ножевая полоса. Нож должен двигаться так, чтобы каждая ножевая пластинка полностью пробегала расстояние от середины одного пальца до середины другого. Эти крайние положения должны соответствовать двум мертвым положениям кривошипа и шатуна; в противном случае надо помощью подвертывания или отпускания тяг отрегулировать ход ножей. Кроме того, необходимо проверять помощью шнура, чтобы нож и шатун при сборке механизма находились в одной вертикальной плоскости. В нек-рых косилках можно изменять длину шатуна, пользуясь имеющейся в нем резьбой. Если косилка уже много работала и шарниры истерлись, не следует изменять длину шатуна, а производить регулировку тягами; в случае нее невозможности сделать это, нужно произвести ремонт шарниров. Подтягивание пальцевого бруса производится различно в разных системах. К косилке обычно прилагаются две ножевые полосы, из которых каждая работает только полдня, после чего ее сменяют для того чтобы отточить, а частью и заменить сильно зазубрившиеся ножевые сегменты.
Косилки изготовляются большей частью с шириной захвата в 1,4 метров Такая косилка требует запряжки двух лошадей. Строятся, однако, и одноконные косилки с шириной захвата в 1,05 метров и оглобельной запряжкой, но такие косилки тяжелы для одной лошади, и потому работать на них необходимо со сменными лошадьми.
К косилке можно присоединять жатвенное приспособление, состоящее из небольшой платформы с рядом деревянных планок, служащих для образования снопа; к наружному башмаку присоединяется делитель для поддержки стеблей и колесико, приподнимающее брус на нек-рую высоту. Для сбрасывания образовавшихся снопов применяются или ручные грабли или особое мотовило. Вообще говоря, жатвенные приспособления на косилке работают недостаточно удовлетворительно, особенно на спутанном хлебе, и их можно рекомендовать только для уборки яровых хлебов; но все же скорость ножа в этом случае является слишком большой, т. к. срезание стеблей хлеба производится выше, чем стеблей травы, вследствие чего нож захватывает меньшее число их, и, кроме того, сопротивление соломистых стеблей меньше, чем—сочных стеблей травы.
Тракторные косилки известны двух типов: прицепные, построенные аналогично конным косилкам, и тракторные приспособления, состоящие из ножевого аппарата и кривошипного механизма, присоединенных к механизму трактора. Из приспособлений второго рода у нас особенно известна система Детройт. Здесь пальцевый брус располагается с правой стороны трактора, впереди ходовых колес. Движение ножа получается от конической винтовой шестерни, сидящей на валу шкива; шатун—железный, полый, короткий и легкий. Для изменения скорости движения ножа одна пара цилиндрич. зубчаток заменяется другой (весь механизм перемены передач и кривошипный вал заключены в коробку). Пальцевый брус присоединяется при помощи двух стальных тяг—передней, пруяшнной, более тонкой, и задней — более толстой. Приспособление Детройт строится на ширину захвата 1,5, 1,8 и 2,1 метров Кроме Детройт, пользуются распространением системы Родрик Лин и Тасо.
Моторную косилку передвигают на колесах преимущественно вручную, причем только режущий механизм работает от поставленного на раме ее мотора; однако, существует возможность заставить мотор действовать на ходовые колеса так, чтобы машина передвигалась самостоятельно. Моторная косилка весит только 140 килограмм, а двигатель, весом в 21 килограмм, развивает действительную мощность в 5 IP. Мотор может обходиться без охлаждающей воды, т. к. он снабжен турбовентилятором для воздушного охлаждения. В моторной косилке имеются две различные скорости движения ножа в 2,5 и 5 м/ск.
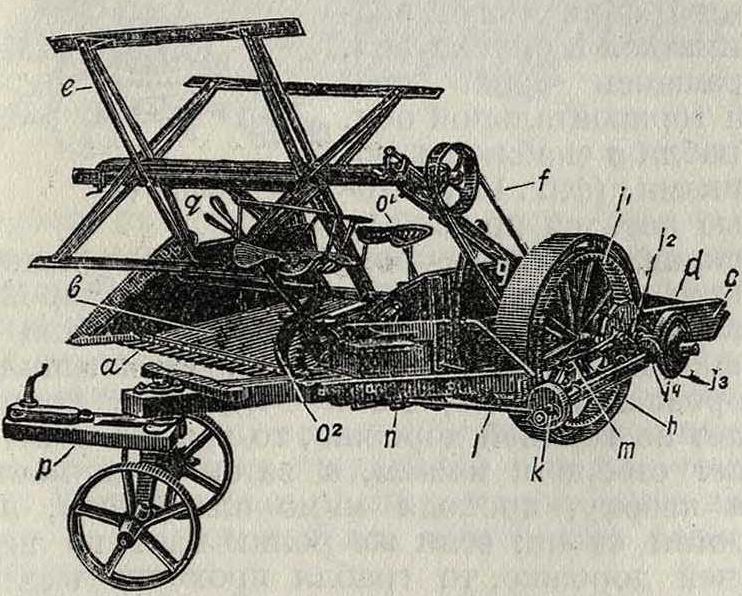
2. Жнеи, а) Жнея-лобогрейка (фигура 14) имеет следующее устройство. Пальцевый брус а укреплен спереди четырехугольной
Фигура 14.
платформы Ь, снабженной слева придатком в виде жолоба с с откидывающейся назад пружинной доской d или рядом прутьев. Спереди над ножами расположено мотовило е, приводимое в движение от ременной передачи планки мотовила пригибают стебли к ножам и откидывают их на платформу; мотовило м. б. передвинуто выше или ниже, вперед или назад перестановкой брусков д и подшипников его вала. Лобогрейка имеет одно ходовое колесо h; второе (полевое) колесо служит только для поддержки платформы. От ходового колеса движение к ножевой полосе передается парой цилиндрич. зубчатых колес гх и г2 и парой коничесхшх г, и г4; далее—в состав передачи входят кривошипный диск к и шатун I. Включение и выключение механизма производится передвиганием малой цилиндрич. зубчатки г2 вдоль ее оси посредством особого рычага. Шатун лобогрейки делают железным, с загнутым штырем п, к-рый заводится в ушко ножевой полосы и удерживается пружинной защелкой; шатун имеет резьбу для регулировки расположения ножевых сегментов относительно пальцев: если сегменты не доходят до середины пальцев, то шатун надо удлинить, если переходят—укоротить. Рабочий, сидящий на заднем конце платформы на сиденьи ои собирает в сноп вилами или граблями падающие на платформу срезанные ножем стебли, продвигает сноп слева направо и затем сильным взмахом сбрасывает его с платформы. Сиденье о2 второго рабочего, управляющего лошадьми, расположено впереди на коротком дышле (снице) треугольной формы, опирающемся спереди на двухколесный передок р, снабженный дышлом для запряжки и шкворнем для вальков. Установка платформы, согласно потребной высоте резки, производится рычагом т относительно ходового колеса и аналогичным рычагом—относительно полевого; наклон платформы осуществляется рычагом q около переднего сиденья. Обод ходового колеса лобогрейки делается обычно без рифов, так как значительный вес машины обеспечивает сцепление колеса с землей. Ширина захвата (длина ножа) лобогрейки—1,8 метров запряжка в 2 лошади.
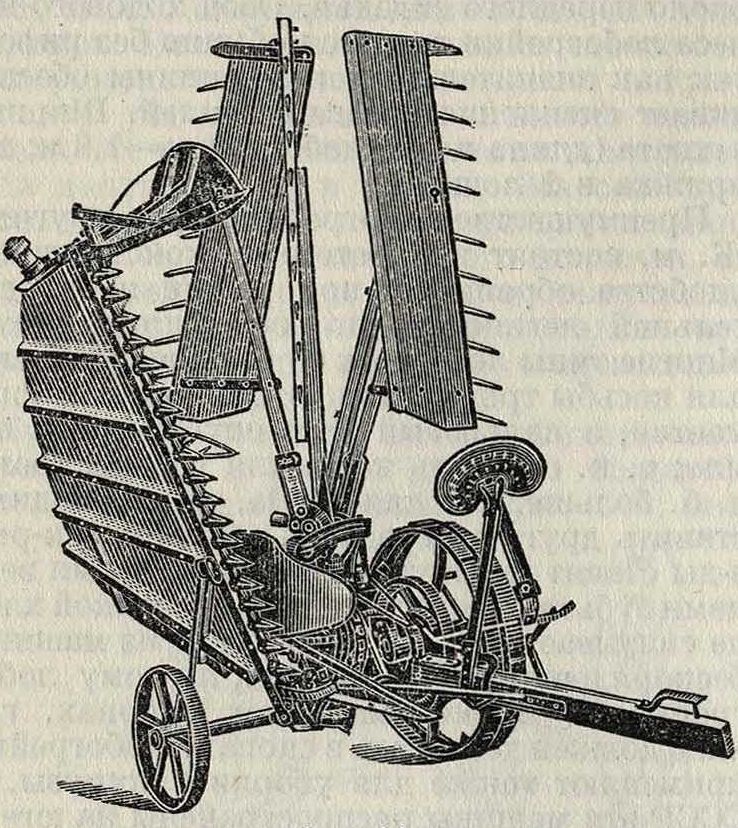
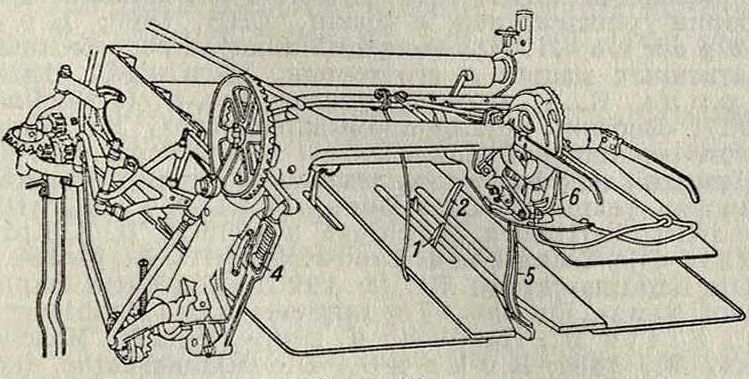
Преимущество лобогрейки перед другими Hi. м. состоит в простоте ее конструкции, удобстве обращения при работе и относительной легкости (тяговое усилие 80кз). Многие типы лобогреек м. б. приспособлены для косьбы травы, для чего платформа снимается, а пальцевый брус опускается к земле; т. к. скорость ножа для уборки травы должен быть больше, чем для хлеба, то необходимо ставить другую передачу, для чего нек-рые з-ды ставят сменную шестерню с двумя венцами зубьев. После уборки лобогрейкой хлеб не связывается, т. к. он выходит из машины беспорядочно перепутанным, поэтому лобогрейка не применима в тех районах, где хлеб должен дозревать в снопах. Лобогрейку применяют также для уборки кукурузы. В СССР эти машины распространены на юге и юго-востоке и отчасти в Сибири; нек-рые заводы пробовали строить лобогрейки со сбрасывающей граблей, но такое устройство не оправдалось вследствие сложности конструкции и быстрого забивания граблей соломой. б) Жнея-самосброска (фигура 15) отличается от предыдущей присутствием авто-матич. сбрасывателя в виде 4 граблей 1,2, 3 и 4, которые сначала пригибают стебли к ножам, а затем сбрасывают на землю образовавшиеся на платформе снопы. Платформа
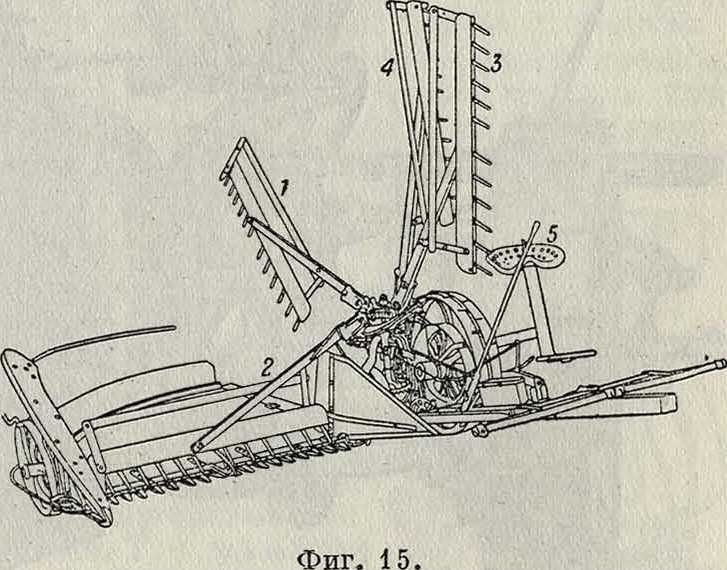
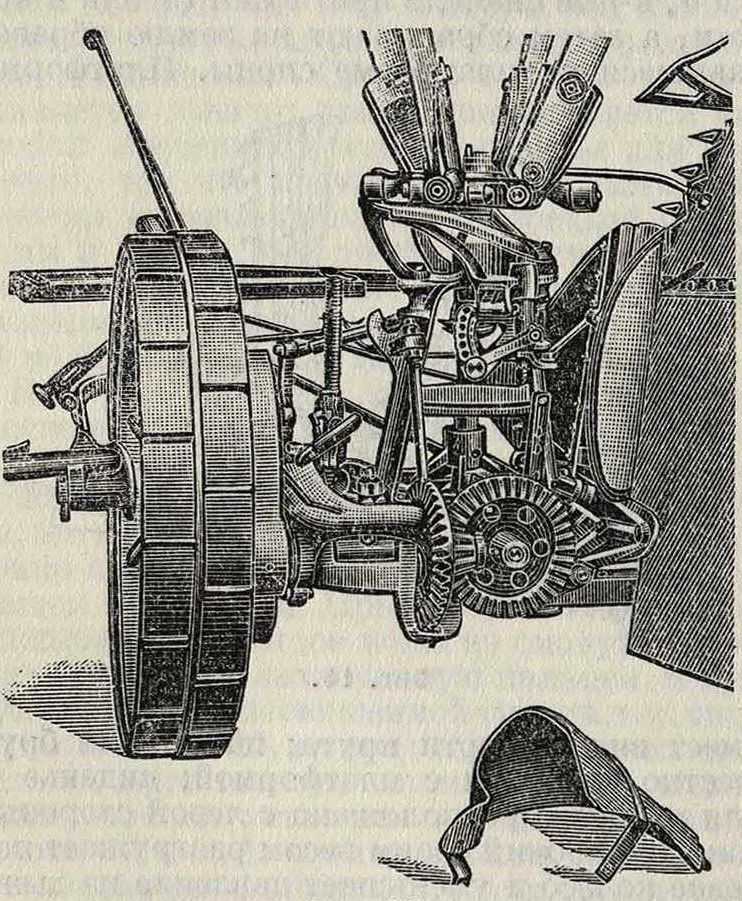
имеет вид четверти круга; пальцевый брус жестко соединен с платформой; сиденье 5 для рабочего расположено с левой стороны, так что рабочий своим весом разгружает полевое колесо и уменьшает давление на дышло, к-рое обыкновенно не имеет передка. При переездах с места на место жней устанавливают на транспорт (фигура 16), для чего платформа поднимается, а полевое колесо переставляется на другую ось, находящуюся под платформой. Передаточный механизм жнеи-самосброски состоит из следующих частей: а) для передачи движения к ножам служит храповой механизм, две пары зубчатых колес (первая—цилиндрическая и вторая—коническая) и механизм кривошипа и
шатуна; б) для передачи движения к грабельному аппарату от вала цилиндрич. зубчатки служат еще две пары конич. зубчаток
Фигура 16.
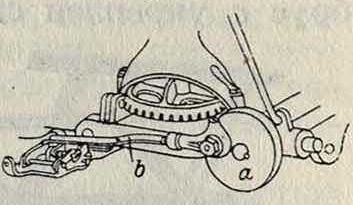
(фигура 17). Кривошип а (фигура 18) выполняется большей частью в виде диска с противовесом; как показали исследования, противовес обыкновенно получает недостаточный вес и может уравновесить только 10 — 15% инерционных сил. Шатун b делается железный длиной в среднем 0,4 метров для изменения его
Фигура 17.
длины он снабжается резьбой, которой может ввинчиваться в муфту. Передача к ножам ускоряющая, и передаточное число для
77 · 37
жнеи Дирингаг=дтд=18,5, для жнеи МакКормика г== 23,5. Таким образом, при диаметре ходового колеса 0,82 метров и скорости машины 1 м/ск, на один оборот ходового колеса нож делает в среднем 40 качаний,
то есть 16 качаний в ск., или ок. 1 000 в м., а за 8-часовой рабочий день ок. 450 000 (по сравнению с косилкой меньше на 25%). Передача движения к грабельному аппарату делается замедляющею; передаточное число для
Мак-Кормика г== 0,44, для Массей-
Гарриса г=^=0,55; следовательно,вал,
несущий грабли, делает 12 об/м. Головка грабельного аппарата сидит на вертикальной оси. Кроме того, каждая грабля может подниматься и опускаться, вращаясь около своей горизонтальной оси.
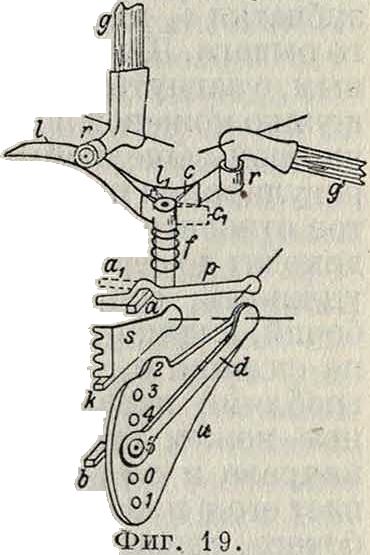
Грабли д снабжены роликами г (фигура 19), кото- Фигура 18.
рые катятся по особым искривленным дорожкам; в том положении, когда грабля подходит к ножам, дорояс-ка разделяется на две части — верхнюю и нижнюю (по схеме на фигуре 19: внешняя дорожка I, внутренняя — it); если ролик идет по верхней дорожке, то грабля пригибает стебли к ноясам, а затем поднимается кверху, проходя мимо платформы, не трогая снопа; если же ролик идет по нижней дорояже, то грабля проходит вдоль платформы и сбрасывает сноп. При переходе на верхнюю или нижнюю дорожку стоит стрелка с снабженная пружиной /; проходя при открытом полоясении сх стрелки по нижней дорожке, ролик (вращая стрелку из положения сх в положение с) закрывает за собой стрелку и заставляет следующую граблю идти поверху. В закрытом положении стрелка удеряжвается посредством особой защелки, состоящей из крючка р и отростка а стрелки (ах — положение отростка, сооветствующее положению с“ стрелки). Крючок нужно снять, чтобы под действием пружины открылась стрелка. Снятием крючка заведует автоматически действующий прибор, называемый счетчиком. В зависимости от густоты хлеба счетчик устанавливают так, чтобы он пропускал грабли вдоль платформы подряд или через одну, две, три и т. д. Если яселательно сбрасывать снопы один подле другого при каждом следующем заезде, то счетчик ставят на нуль и действуют педалью. Существуют 4 типа счетчиков: червячный, или секторный, храповой, кулачный и улиточный. Секторный счетчик состоит из еле- ^ дующих частей: на вер- Ш тикальном валу о гра- Щ, бельной колонки наса-яШ ясен червяк т с четырь- Г||| мя неполными винтовы- „Ц), ми ходами, с которыми сцепляется рычажок-сектор s. При движении сектора s вверх он снимает крючок р, освобождая таким образ, отросток а стрелки; при падении его вниз кулачок к упирается в выступ Ь рычажка d, перестанавливаемого по сектору и на соответствующее ренсиму работы граблей отверстие (по схеме 5). Хра-

повой счетчик вместо сектора имеет храповую муфту, поворачиваемую помощью собачки, которая получает качательное движение от
Фигура 20.
вертикального грабельного вала. При упоре собачки в последний зуб храповика, последний сбрасывает защелку. Кулачный счетчик, наиболее простой по конструкции, имеет переставную муфту с кулаками, расположенными чаще или реже. В улиточном счетчике рычажок, снабженный роликом, катится вверх по спиральной дорожке-улитке. Устанавливая ролик рычажка выше или ниже, получают более частое или редкое сбрасывание.
Жнея-самосброска имеет ширину захвата 2,5 метров Для запряжки требуется пара лошадей; есть и одноконные жнеи с шириной захвата 1,1 м, но эти машины очень тяжелы в работе. Сопротивление при работе распределяется так, что на перекатывание машины требуется 50% усилия, на работу механизма 20% и на резание и сбрасывание 30%.
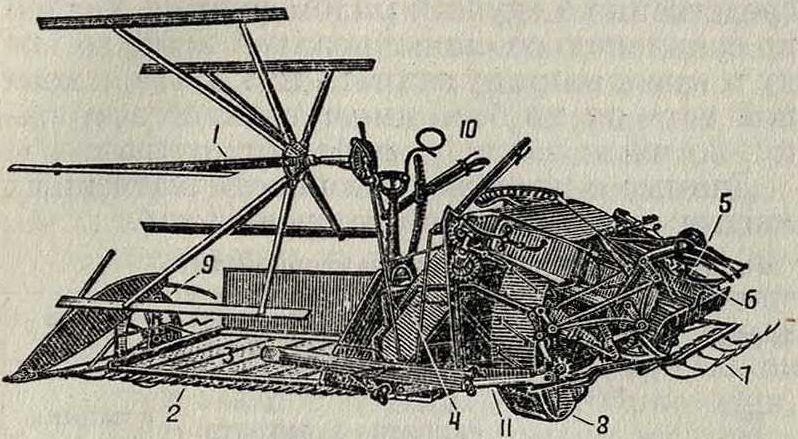
в) Сноповязалка одновременно жнет и связывает снопы. Она состоит из следующих основных частей (фигура 20): мотовила 1, пригибающего стебли к ножам; режущего аппарата 2 бесконечного полотна (платформы) 3, передвигающего срезанные стебли к элеватору; элеватора 4, поднимающего стебли; вязального стола 5, где образуется сноп; вяжущего аппарата б и снопоноса 7. Машина снабжена одним ходовым колесом 8 и одним
Фигура 22.
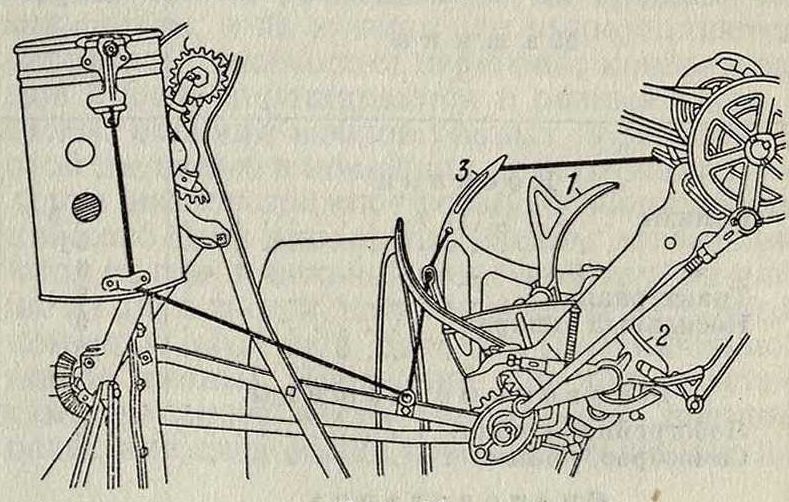
полевым 9 и обыкновенно имеет двухколесный передок автомобильного типа с параллельно повертывающимися колесами; запряжка дышловая, трех- или четырехконная. Мотовило состоит из шести планок и устанавливается соответственно высоте и на клону стеблей при помощи рычагов 10, расположенных около сиденья рабочего. Режущий аппарат отличается тем, что ножевые сегменты пробегают два промежутка между пальцами; шатун 11—деревянный. Полотна платформы и элеватора снабжены деревянными планками (фигура 21) для захватывания стеблей. Стебли, поданные элеватором на наклонный стол, скатываются по нему и подхватываются попеременно действующими вилками (компрессорами) 1 и 2 (фигура 22 и 23), которые набивают сноп до тех пор, пока он своей упругостью не преодолеет действия
Фигура 23.
пружины 4, удерживающей упорный рычаг 5. Тогда включается вяжущий механизм, и в прорез стола высовывается игла 3, опоясывающая сноп шпагатом, концы которого завязываются узловязателем б. В зависимости от длины стеблей (рожь, овес) вязальный стол можно передвигать так, чтобы вязка приходилась приблизительно по середине снопа. Узловязатель, к-рый применяется в настоящее время (сист. Эпльби), состоит из трех частей: клюва а, зажима b и ножа с (фигура 24). Процесс вязки происходит след, обр.: 1) на верхнюю челюсть клюва накладывается шпагат, закрепляемый в зажиме; 2) игла, обхватывая сноп, подает вторую нитку и накладывает ее рядом на клюв; 3) клюв поворачивается на 180°; 4) повернувшись еще на 90°, клюв раскрывается;
5) поворачиваясь далее, он захватывает обе нитки и сжимает их, приняв первоначальное положение. Т. о. на клюве образуется петля,конец которой захвачен челюстя- фИг. 24.
ми; если стащить петлю с клюва, то конец ее, задержанный клювом, пройдет в петлю, и получится узел. Стаскивание шпагата с клюва производится особыми вилками, сбрасывающими сноп. Конец шпагата, протаскиваемый в петлю, отрезается ножом. Зажим обыкновенно состоит из двух дисков—подвижного и неподвижного. В подвижном диске имеется ряд прорезов, в которые заправляют шпагат; когда диск поворачивается, то, захватывая шпагат, зажимает его. Снопонос служит для того, чтобы связанные и выброшенные снопы не падали сразу на землю, а задерживались на нем и затем плавно опускались по 4—5 шт.
14
Т. Э. m. VII.
Рабочий управляет снопоносом посредством особой педали.
Механизм сноповязалки довольно сложен: от ходового колеса идет цепь для движения поперечного вала, на к-ром сидят сцепная муфта и коническая зубчатка, передающая движение к кривошипному валу, на оси которого сзади сидит звездочка, передающая движение посредством цепи валикам полотен платформы и элеватора и узловязателю.
Далее при помощи системы передач движение сообщается остальным частям. Сноповязалка снабжается передком автомобильного типа, позволяющим производить крутые повороты машины. Для перевоза машины в поле и обратно она устанавливается на особые колеса, а дышло переносится и укрепляется так, что сноповязалка передвигается поперек своего рабочего хода. Сила тяги, потребная для работы сноповязалки с шириной захвата 2 м,—ок. 330 килограмм; половина силы тратится на перекатывание машины. Расход силы на работу механизма распределяется приблизительно поровну между элеватором, узловязателем (с компрессорами), связкой и остальными механизмами. Тракторные сноповязалки имеют ширину захвата 2,25—2,85 метров.
В новейших америк. сноповязалках имеется приспособление для вязки снопов в бабки (шокер), прикрепляемое сбоку, производящее связывание снопов по 5—6 штук вместе и затем опускающее их на землю. Шокер мало увеличивает силу тяги на ровной поверхности и твердом грунте и содействует уравновешиванию боковой тяги сноповязалки ; он заменяет работу двух человек.
Кроме сноповязалок обычного типа^ строят т. н. пушбайндеры — сноповязалки с шириной захвата 2,85—3,70 м, причем лошади впрягаются сзади машины и толкают ее перед собой. К о л о с о у б о р к и, то есть машины, срезывающие только колос или колос с небольшой частью стебля, носят название хеддеров. Они не имеют узло вязателя, а захватывают срезанные колосья полотном платформы и передают их далее на элеватор, с которого они ссыпаются непосредственно в едущий рядом фургон. Хеддер по сравнению со сноповязй легче на ходу и имеет ширину захвата до 3,5 м; при конной тяге он по б. ч. имеет заднюю запряжку, но чаще всего он работает от трактора.
Данные о производительности жатвенных машин приводятся в следующей табл.:
В Австралии и вообще в местностях с очень сухим климатом и при полном созревании хлеба применяются стрипперы, или жнеи-молотилки, которые посредством особых гребенок и мотовил.отбивают колосья, а иногда тут же и домолачивают зерно. Для специальных культур в Америке строят особые машины.
Лит.: Вейс Ю. А., Косилки, жатки и сноповязалки, 4 изд., М., 1926; е г о ж в, Курс с.-х. машиноведения, 2 изд., Л., 1927; ГорячкинВ. П., Теория жатвенных машин, СПБ, 1909; его же, Косилки, жнеи и сноповязалки, М., 1917; е г о ж е, Земледельч. механика, ч. 1, М., 1922; е г о ж е, Земледельч. машины и орудия, Москва, 1923; Ган В. 10., Отчет о конкурсных испытаниях уборочных машин русского производства, СПБ, 1909; Д е б е и А., Машины для уборки урожаев, пер. с франц., СПБ, 1900; К р а-м арен к о Л. П., Режущий аппарат современных жатвенных машин и его теория, Киев, 1917, 1923; К р и ль Б. А., С.-х. машиноведение, ч. 1, Москва, 1927; «Вестник металлопромышленности», М.; «Восточно-европейский земледелец», Кенигсберг, с 1 926; «Известия новейшей с.-х. техники», Берлин; «Американская техника», Нью Иорк; Walther К., Die landwirtschartlichen Maschinen u. Gerate, В. 2, Lpz., 1923; «Die Technik in d. Landwirtschaft», B., ab 1922; «Die Landmaschine», B., ab 1925; «The Farm Implement News», Chicago; «The Implement and Machinery», L.; Fritz II., Handbuch d. landwirtsehaftl. Maschi-nen, B., 1880; Ktihne G., Die Mahmaschine, ihre Entwicklung u. Anwendbar.keit auf deutsche Verlialt-nisse, «Maschinen-Zeitung», В., 1910; N a c h t w e h A., Beitrage zur Kenntnis, Theorie u. Beurteilung d. Miih-maschinen, B., 1904; Per els E., Die Mahmaschinen, Jena, 1869; Per els E., Ilandb. d. landwirtsehaftl. Maschinenwesens, В. 1—2, Jena, 1879—80; Schw a τζετ H., Landmaschinenkunde, 3 Aufl., B., 1927; W ii s t A.,DieMahmaschinend.Neuzeit.Lpz, 1875; Wiist A. Landwirtsehaftl. Maschinenkunde, 2 Auf]., Б, 1889; Hamm W., Die landwirtsehaftl. Gerate u. Maschinen I Englands, 2 Aufl., Brschw., 1856—58. Б. Криль.
Производительность уборочных машин (при конной и тракторной тяге).
| Машина | Ширина захвата | Скорость,
км/ч | Производительность в га за 1 раб. день на: | |||
| фт. | м | 1 фт. захвата | 1 м захвата | 1 машину | ||
| Косилка | ||||||
| Конная | 4,5 | 1,37 | 3,2—3,7 | 0,8 | 2,66 | 3,6 |
| » | 5 | 1,52 | 3,2—3,7 | 0,8 | 2,66 | 4,1 |
| » | 6 | 1,83 | 3,2—3,7 | 0,8 | 2,66 | 4,8 |
| Тракторная .. | 8 | 2,44 | 4,8—5 | 10—12—15 | ||
| Носильный аппарат.. | 6 | 1,83 | 4,8—5 | 1,2 | 4,0 | 7,2 |
| » » .. | 8 | 2,44 | 4,8—5 | 1,2 | 4,0 | 9,6 |
| Жатвенные машины | ||||||
| Лобогрейка, конная.. | 6 | 1,83 | 3,5 | 0,8 | 2,66 | 4,81 |
| Самосброс, конный.. | 5 | 1,52 | 3,5 | 0,8 | 2,66 | 4,0 |
| Сноповязалка | ||||||
| Конная | 7 | 2,13 | 3,2—3,7 | 0,87 | 2,84 | 6,06 |
| Тракторная .. | 7 | 2,13 | 4,0 | 1,21 | 4,0 | 8,48 |
| Тракторная специальная. | 7 | 2,13 | 4,85—5,25 | 1,2—1,4 | 4—4,6 | 8,4—9,8 |
| Кукурузная конная.. | — | — | 3,65 * | — | — | 2,4 |
| » тракторная. | — | — | 4,00—5,25 | — | — | 3,6 |
| Хеддер | ||||||
| Конный | 10 | 3,05 | 3,25—3,65 | 0,8—1,0 | — | 8—10 |
| » | 12 | 3,66 | 3,25—3,65 | 0,83—1,0 | — | 10—12 |
| » | 14 | 4,27 | 3,25—3,65 | 0,85—1,0 | 12—14 | |
|
* При междурядий в 1 метров. | ||||||