 > Техника, страница 49 > Индукционные машины
> Техника, страница 49 > Индукционные машины
Индукционные машины
Индукционные машины, электрич. машины переменного тока, возбуждаемые со стороны первичной цепи переменным током, имеющие электрически независимые первичную и вторичную обмотки и вращающиеся с изменяющейся от нагрузки скоростью. Они разделяются на бесколлек-торные (асинхронные) и коллекторные машины (смотрите). Существует и промежуточный тип двигателей, вторичная обмотка которых связана с первичной электрически и индуктивно (наир, сериесный коллекторный двигатель). У бесколлекторных машин первичная часть соединена с источником переменного тока, а вторичная часть связана с первой трансформаторным путем и замкнута накоротко. Асинхронные бесколлекторные машины имеют наибольшее распространение в качестве двигателей. В отдельных случаях они применяются как генераторы, трансформаторы фазы и напряжения, преобразователи частоты и индукционные катушки.
Асинхронные бесколлекторные машины применяются как для однофазного, так и для многофазного тока. В последнем случае подавляющее распространение имеет трехфазный ток.
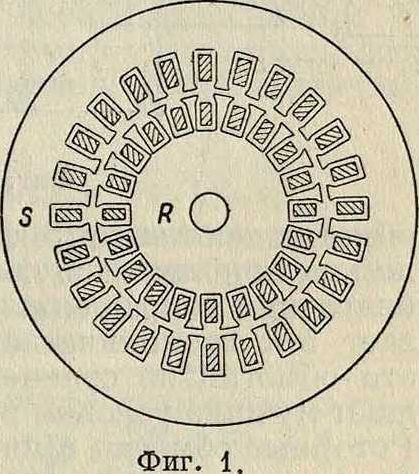
I. Основные элементы машины. Первичная часть машины обычно находится на неподвижной части, называемой статором, а вторичная—на вращающейся, носящей название ротора; но возможно и обратное распределение этих частей. Статор S и ротор R асинхронной машины (фигура 1) выполняются из листового железа, толщ, обыкновенно 0,5 миллиметров, проклеенного с одной стороны бумагой, толщиной 0,05 миллиметров, для уменьшения потерь от токов Фуко. В этих листах проштамповываются пазы, в которые укладывается обмотка. В маленьких машинах пазы изготовляются с непараллельными стенками таким образом, чтобы зубцы имели стенки параллельные, в более крупных машинах пазы имеют параллельные стенки. Для уменьшения сопротивления намагничивающей цепи лазы асинхронных машин обычно изготовляют полузакрытого типа. В высоковольтных машинах с напряжением в 3 000 V и выше в последнее время стали применять открытые пазы,к-рые дают возможность употреблять шаблонную обмотку, пропитанную компаундной массой.
5
Т. Э. m. IX.
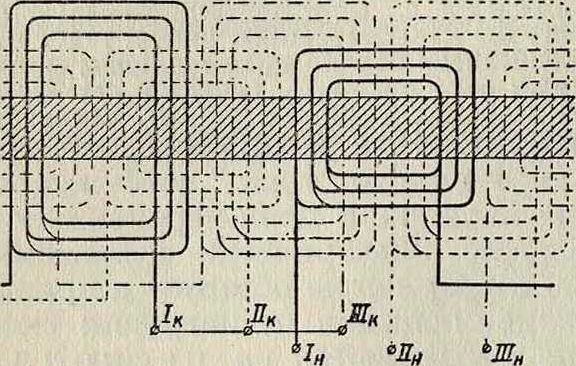
2. Обмотни. При трехфазном токе обмотка выполняется на каждом двойном полюсном делении из трех систем катушек, оси которых сдвинуты относительно друг друга на 120 электрич. градусов (*/3 двойного полюсного

Фигура 2.

расстояния). Статорная обмотка соответствует обмотке якоря синхронной машины. Наиболее распространенной является катушечная обмотка с двухэтажным распределением головок, схематически изображенная на фигуре 2. Обмотка I фазы выделена жирными линиями, а II и III—изображена различными пунктирами. Начала и концы фаз отмечены соответствующими индексами (н и к). Все три фазы соединены на схеме в звезду. В последнее время под влиянием американской практики начали распространяться разрезанные обмотки постоянного тока с укороченным шагом ок. 0,8 полюсного деления т. Схема такой обмотки с сокращением шага до 0,78 тонн представлена на фигуре 3. Эти
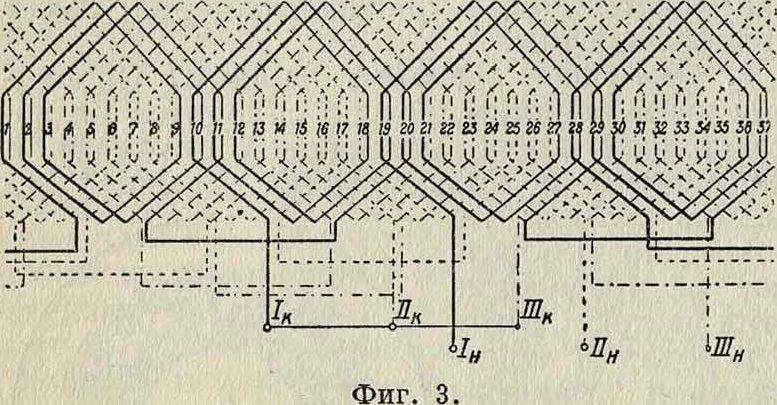
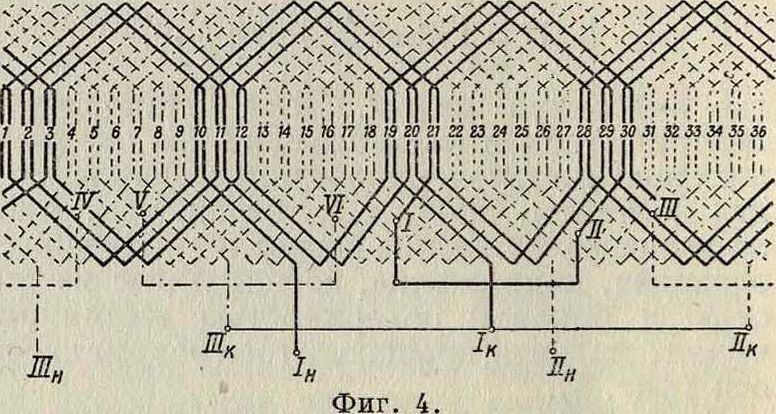
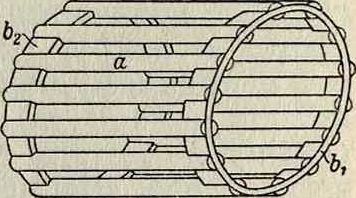
обмотки дают магнитодвижущую силу (мдс), весьма приближающуюся к синусоиде, т. к. благодаря сокращению шага до 0,8 τ исчезает 5-я гармоническая поля. Кроме того, эти обмотки по сравнению с катушечными, дают лучшие условия в отношении нагрева. Роторные обмотки выполняются или в виде фазовых, выведенных на контактные кольца, или в виде короткозамкнутых. Наиболее распространенными типами фазовых обмоток являются: катушечная обмотка (фигура 2), применяемая обычно в мелких машинах, и обегающая волновая обмотка, разрезанная на три части для образования трехфазной системы (фигура 4). Удобство этой обмотки по сравнению с разрезанной обмоткой постоянного тока (фигура 3), заключается в меньшем количестве соединительных проводов между разрезанными участками. Коротко-замкнутые обмотки выполняются также и в виде беличьей клетки (фигура 5). Она состоит из массивных стержней а, вкладываемых в пазы ротора без изоляции. Торцевые части стержней припаивают или приваривают к медным кольцам Ьг и bг.
3. Вращающееся магнитное попе. Если к системе из трех катушек, оси которых сдвинуты в пространстве на 120 электрич. градусов, подвести токи, сдвинутые во времени на 1209 (трехфазный ток), то они образуют результирующую мдс, ось которой в течение изменения тока на один период будет перемещаться по окружности статора и ротора на двойное полюсное деление, образуя вращающееся магнитное поле. На фигуре 6,а, согласно помещенной внизу рисунка диаграмме мгновенного распределения токов, ток в фазе Г-1” равен максимальному положительному значению, а в фазах ΙΓ-ΙΓ и ΙΙΓ-ΙΙΙ"—половине максимального значения с обратным знаком, благодаря чему ось магнитного потока Ф совпадает с осью катушек фазы Г-Г. На фигуре 6,6 взят момент
через 30° во времени, когда ток в фазе ΙΙΓ-ΙΙΙ" равен нулю, а в фазах Г-1" и
ΙΓ-ΙΙ" равен ± своего максимального значения, благодаря чему ось потока Ф сдвинулась по часовой стрелке на 30° в пространстве и совпадает с плоскостью катушек фазы IIГ-1 II". На фигуре 6,в взят следующий момент, еще через 30° во времени, когда ток в фазе ΙΓ-ΙΙ" равен максимальному отрицательному значению, а в фазах Г-1" и ΙΙΓ-ΙΙΙ"—половине этого максимального значения, но с положительным знаком, благодаря чему ось потока Ф,
Фигура 5.
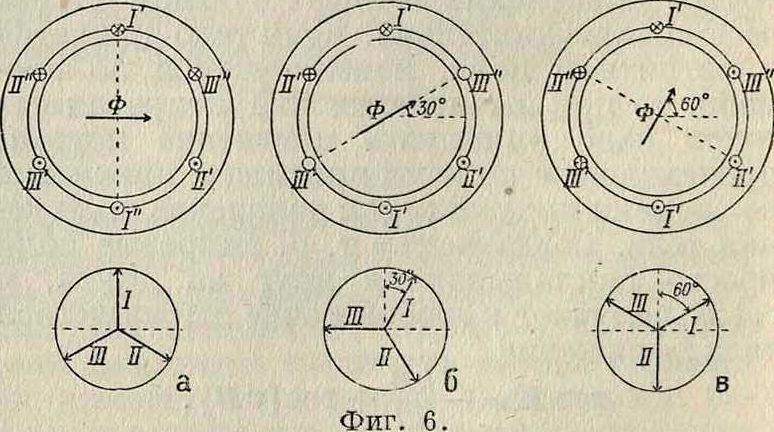
сдвинувшись на следующие 30° в пространстве, совпадает с осью катушек фазы ΙΙ-ΙΙ". Таким образом, каждому сдвигу тока, во времени соответствует сдвиг оси магнитного потока на тот же угол в пространстве, благодаря чему и получается вращающееся магнитное поле. Если обмотки питаются трехфазным током, то форма распределения мдс вдоль воздушного зазора не будет чисто синусоидальной, но будет иметь, кроме основной, еще и высшие гармоники поля, которые будут перемещаться со скоростью, соответствующей частоте и знаку данной гармоники (смотрите Генератор переменного тока). Скорость, с которой вращается основная синусоида мдс и поля, носит название синхронной. Если обозначить число пар полюсов машины через р, число периодов первичной цепи через/г, то синхронная скорость (в об/м.)
«е.=6-°Г· (1)
4. Асинхронный двигатель, а) П р и н ц и п действия. Электрич. энергия, подводимая к первичной цепи многофазного асинхронного двигателя, превращается в магнитную, которая путем соответствующего размещения обмоток распределяется синусоидально вдоль воздушного зазора. Образующееся вращающееся магнитноеполе пересекает вторичную обмотку и индуктирует в ней эдс, величина и число периодов которой пропорциональны относительной скорости ротора и поля. При замкнутой обмотке и неподвижном роторе эта эдс вызывает во вторичной цепи токи, к-рые, вступая во взаимодействие с полем, создают механич. усилия, направленные в сторону вращения поля. Так как статор неподвижно закреплен, то ротор начинает вращаться в направлении поля. Если первичная цепь находится на роторе, то он начинает вращаться против поля. Если при первичной системе на статоре довести ротор до синхронной скорости, то его проводники не будут пересекаться вращающимся полем, вследствие чего в них исчезнут эдс hjtok, а следовательно, исчезнет и вращающий момент, увлекающий ротор в направлении вращения поля. Однако,трение и механич. потери, существующие и при отсутствии нагрузки, вызовут отставание ротора от магнитного потока, и в обмотке ротора появятся токи, которые создадут вращающий момент, необходимый для покрытия этих потерь. Т. о., ротор двигателя имеет стремление догнать поле, но не может достигнуть синхронизма, почему такой двигатель и носит название асинхронного. Отставание скорости ротора от скорости магнитного поля носит название скольжения. Если магнитное поле вращается со скоростью пс_ об/м., а ротор—со скоростью об/м., то скольжение можно представить ф-лой:
пс. - пр-
s=—-· (*)
Вращающий момент и скольжение находятся в тесной зависимости между собой. При холостом ходе двигателя, когда вращающий момент нужен только для покрытия потерь на трение в подшипниках и о воздух, ротор вращается со скоростью, ничтожно отличающейся от синхронной. При нагрузке двигателя вращение ротора замедляется, и скольжение возрастает. Так как в этом случае обмотка ротора перерезает большее число магнитных линий, то эдс и ток в ней возрастают, благодаря чему увеличивается и вращающий момент. В небольших двигателях скольжение при полной нагрузке достигает 5%, в средних и больших всего 1— 1,5%. Так как у асинхронного двигателя изменение скорости при переходе от холостого хода к полной нагрузке весьма невелико, то в этом отношении он имеет полное сходство с шунтовым двигателем постоянного тока в случае его работы при постоянном напряжении на зажимах и постоянном возбуждении.
Если при неподвижном двигателе вращающееся магнитное поле индуктирует во вторичной системе эдс Е2, то при скольжении s эта эдс будет равна
ТЬг· — TW
®и--^ ·&-* я“· (3)
Соответственно, частота вторичной цепи выразится уравнением:
U-8 -Гг. (4)
Разница скоростей поля и ротора ео/«
(5)
а потому скорость ротора
пр.=пс~п2=Wc. (1 - s). (6)
б) Асинхронный двигатель как трансформатор. Асинхронный двигатель при неподвижном роторе представляет короткозамкнутый трансформатор с вращающимся полем. При вращении ротора со скоростью и,. об/м. поле вращается относительно ротора со скоростыои2об/м., а относительно статора—со скоростью пр_ +и2=ис. об/м., то есть с той же скоростью, с какой относительно статора вращается и основное поле. Т. о., при любых скоростях двигателя поле ротора и вращающееся поле имеют относительно неподвижного статора одну и ту же скорость. Это обстоятельство дает возможность привести вращающийся двигатель к статическому трансформатору, который по своему воздействию на первичную систему будет эквивалентен этому асинхронному двигателю. При неподвижном роторе вторичный ток двигателя
j = Ег =—3---- (7)
2 1/κΐ + (2π/,χ.2)2 V К1+,ж!
где и ж2—активное и реактивное сопротивления, а Ь2—коэфф. самоиндукции (рассеяния) вторичной цепи. При вращении ротора со скольжением s
J.__sЕ,_ _El___
l/Rl+(2 nfiLif + (ZnftLiY
г + ж|
Выражения (7) и (8) отличаются только членом активного сопротивления. Этот член при вращении двигателя м. б. представлен в следующем виде:
У /гй.ь!у./. 2, (9)
то есть при вращении асинхронный двигатель будет эквивалентен статич. трансформатору, у которого вторичное активное сопротивление увеличивается добавлением члена Д2, а реактивное сопротивление x2=2nf1L2
остается неизменным при всех скоростях. При неподвижн. двигателе скольжение s=1, поэтому Д2, то есть выражения (7) и (8) являются идентичными. При s=О,
~=Е2+ со=оо,
благодаря чему вторичный ток 12 равен О, и двигатель не развивает никакой мощности. При s= + оо, ~ —0, поэтому вторичный ток становится реактивным и двигатель также не развивает вращающего момента.
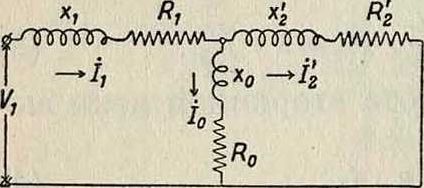
Эквивалентная схема асинхронного двигателя, приведенная к статич. трансформатору, представлена на фигуре 7. Здесь Иги хг представляют активное и реактивное сопротивления первичной цепи, R0и х о—сопротивления намагничивающего контура. Точно так же ϋ2, хг и Ггпредставляют сопротивления и ток вторичной цепи, приведенные к первичной цепи:
Фигура 7.
| r^=r2 | ml /Wj/tA2 т2 Vwa/tJ ’ | (10) |
| х2=х2 · | ΖΊ·
m£ waii2/ ’ |
(10а) |
| K=h | m2wafe2 | (11) |
Здесь т1 и т2—числа фаз первичной и вторичной цепи, wx и гг2—числа витков этих цепей и К и /с2—их коэффициенты обмоток. Выражение. Щ представляет собою вышеупомянутый добавочный член, дающий возможность привести вращающийся двигатель к статическому трансформатору.
При работе асинхронного двигателя его статорная и роторная обмотки обтекаются токами. К статору ток подводится из внешней цепи, в Фигура 8.
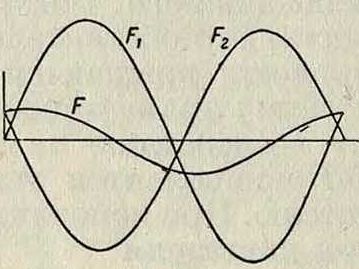
роторе же он индуктируется вращающимся магнитным полем. Обе мдс распределяются синусоидально вдоль воздушного зазора и двигаются вдоль него с одной и той же скоростью, сохраняя неизменное расположение одна относительно другой. Обе синусоиды Fx и F2 (фигура 8) почти противоположны, но несколько сдвинуты одна относительно другой, причем мдс статора Fx несколько выше, чем мдс ротора F2. Равнодействующая этих двух синусоид F дает ту намагничивающую мдс, которая создает магнитный поток взаимоиндукции статора и ротора, проходящий через воздушный зазор. Равнодействующая мдсЕ также синусоидальна и перемещается вдоль воздушного зазора с той же скоростью. Расположение мдс Flt
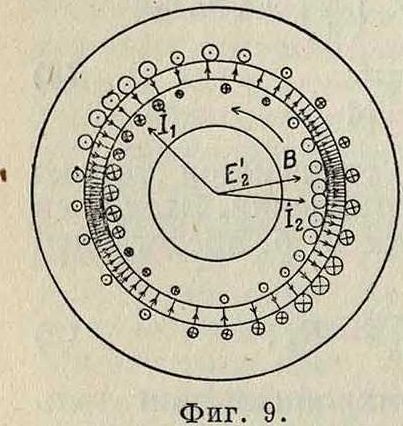
Фигура 10.
F 2 и F представлено в полукартинном изображении на фигуре 9, где векторы токов 1Хи _Г2, индукции В и индуктированной эдс в статоре Е2 направлены к положительным максимумам этих величин соответственно выбранному моменту времени. Изменение этих величин во времени по отношению к некоторой выбранной точке или проводнику статора является синусоидальным и происходит с частотой статора /х; одновременно это изменение является синусоидальным и по отношению к любой выбранной точке ротора, но по отношению к ротору это изменение происходит уже с частотой вторичной системы fi—sfj. Только с этой точки зрения возможно представлять первичные и вторичные переменные величины, имеющие различи, частоты, одной и той же векторной диаграммой. Поэтому векторы фигура 9 метров б. использованы для изображения не только пространственных фаз, но также и временных фаз нескольких переменных, когда они рассматриваются или со стороны неподвижной или со стороны вращающейся части машины. Очевидно, что в действительности нет определенной разности фаз между токами в определенном проводе первичной системы и в каком-либо другом определенном проводнике вторичной системы, имеющей другую частоту.
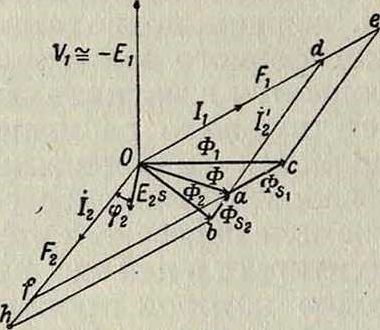
Подобно трансформатору асинхронный двигатель имеет следующие потоки (фигура 10): поток взаимоиндукции Ф, проходящий через воздушный зазор и сцепляющийся одновременно с первичной и вторичной цепью; поток Фх, сцеп-ляющийсяполностыо только с первичной цепью, и поток Ф2, сцепляющийся со вторичной цепью.
Поток Фх составляется из геометрической суммы потока Фи потока рассеяния первичной цепи ас=de=Ф?1> то есть Фх= Ф +
+ Ф8] _ Точно так же поток рассеяния вторичной цепи ab=hf=
= Фз2 и Ф2= Ф+Ф8г. ^
Поток рассеяния Ф, %
совпадает по напра- фигура и. влению с током 1Х и первичной мдс ΐ ; точно так же поток Ф8гсовпадает по направлению с током 12 и мдс F2. Если пренебрегать активным падением напряжения в первичной цепи IXRX, то поток Фх индуктирует в первичной цепи электродвижущую силу Ех, которая уравновешивает приложенное напряжение Fx; поэтому при Fx=Const и Фх^ Const.
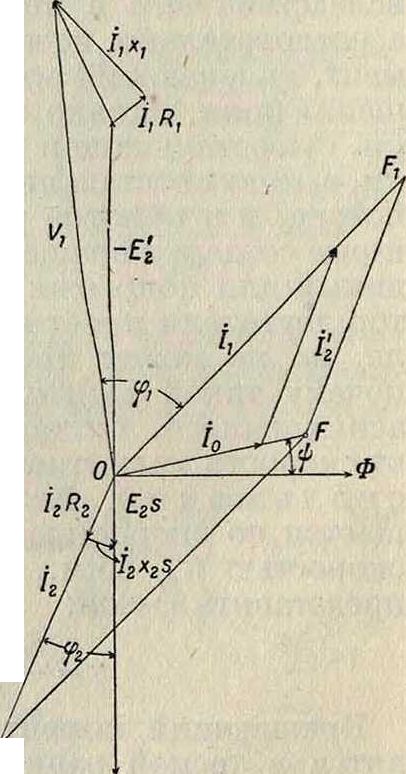
Полная векторная диаграмма асинхронного двигателя при учете активного первичного сопротивления представлена на фигуре 11: здесь — Е2 представляет собою составляющую первичного напряжения, которая уравновешивает обратную эдс Е2, индуктированную в первичной цепи потоком взаимоиндукции Ф; E2s=sE2—эдс, индуктированная потоком Ф во вторичной цепи и отста^ ющая от этого потока на 90°. Ток вторичной системы 12 отстает на угол ψ2 от эдс E2Sвследствие влияния реактивного сопротивления этой цепи 27rf„L2=sx2. Угол φ2 определяется соотношением
cos9?2= Ri (12)
1/Д|+(га2)>
и меняется с изменением скольжения s. Сила тока в обмотке статора iy должна создавать вращающийся магнитный поток Ф и одновременно компенсировать размагничивающее действие тока ί2 вторичной обмотки. Если
OF.2 представляет мдс ротора, совпадающую по направлению с током I2, a OF—результирующую мдс, необходимую для создания потока взаимоиндукции Ф при отсутствии тока в роторе, то мдс статора должна равняться геометрическ. сумме векторов ОЁг== OF + FFX. Последний вектор равен, но прямо противоположен мдс ротора 0F2. Вектор Οί в определенном масштабе одновременно выражает ток в статоре 1г. Результирующая мдс OF благодаря влиянию гистерезиса опережает вектор магнитного потока Ф на небольшой угол ψ.
Напряжение на зажимах первичной обмотки состоит из трех слагающих:
V2 — — Ez -j-1iBj-j- 1 jхл. (13)
С возрастанием нагрузки и тока It увеличиваются падения напряжения и 1хХ, поэтому начинает несколько уменьшаться эдс — Е2 и, пропорционально, поток взаимоиндукции Ф.
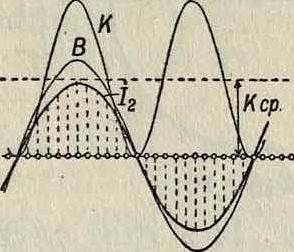
в) Вращающий момент и мощность. Рассмотрим для простоты работу двигателя с ротором в виде беличьей клетки. При нагрузке двигателя его ротор отстает от вращающегося поля, и в проводниках ротора индуктируются токи, число периодов которых пропорционально скольжению. При малых скольжениях реактивное сопротивление роторной обмотки sx2 весьма мало по отношению к активному R2, поэтому ток ро тора ί2 практически совпадает по фазе с вызывающей его эдс sE2. Т. к. кривая распределения величин эдс, индуктированных в отдельных проводниках ротора, совпадает случае беличьей клетки с кривой распределения индукции вдоль воздушного зазора а токи в проводниках пропорциональны эдс, то кривая распределения токов 12 будет совпадать с кривой распределения индукции В (фигура 12). Кривая К, пропорциональная
E2s
Фигура 12.
произведениям значений ί2 и В для каждой точки, очерчивает ординаты, равные меха-нич. силам, действующим в данный момент на отдельные провода ротора. Эта кривая неизменна для различных моментов времени и перемещается вместе с кривой распределения поля, откуда следует, что многофазные асинхронные двигатели дают для данной нагрузки постоянное среднее окружное усилие Кер. и постоянный вращающий момент, независимо от положения ротора. Если двигатель работает при столь значительном скольжении s, что реактивное сопротивление sx2 становится уже достаточно большим
Фигура 13.
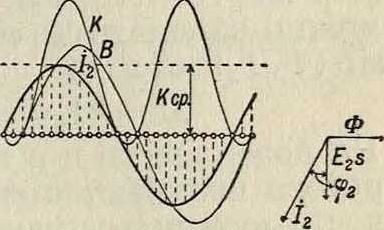
по отношению к активному сопротивлению R 2, то сила тока 12начинает отставать по фазе от эдс sE2на угол у21и кривые распределения тока 12, поля В и окружных усилий К принимают вид, показанный на фигуре 13.
Вследствие несовпадения кривых поля В и тока 12, на нек-рую часть проводников будет действовать механич. сила Кг, направленная противоположно движению поля; в результате, при той же силе тока 12 в роторе, среднее окружное усилие Кср_ и вращающий момент получаются меньшие.
Мощность, передаваемая со статора на ротор,
Т} _ М пс, 2:~г 736 _ М - пс. у,г И
1 е 60 75 0,975 П ’ V ’
если вращающий момент измеряется в кем, а скорость—в об/м. Ротор имеет скорость пр. об/м., поэтому на его окружности развивается мощность
-β“=ρ*-0»’ (!5)
где Р2—мощность на окружности ротора и Q’m—механич. и добавочные железные потери двигателя. Разница мощности Ре и Р2, необходимая для образования тока в роторе, превращается в его обмотках в джоулево тепло. Потерями на токи Фуко и гистерезис в железе ротора QM.2 при малой частоте f2 — f S можно пренебречь, поэтому
Qm-2=— Р2=0 976 (я“. ~ пр·) — snc.=
= sPe=m2I R2=т,(12У R2. (16)
T. о., передаваемая со статора на ротор мощность идет, с одной стороны, на создание полезной мощности на валу Рр_, а с другой стороны—на покрытие потерь в обмотке ротора Qm.2 и механич. добавочных потерь Q‘m. Из предыдущего следует, что
| Пп. пг - По
Ре-1 ~Ре СПс. -РА 1 «), |
(17)
9 |
| 0^=^!=« | (18) |
| Ре пс- | |
| Qm.2 пг s | (19) |
Электрич. мощность QM, теряемая в роторе, пропорциональна скольжению s и зависит от сопротивления R.z, поэтому для получения хорошего кпд R2 должен быть возможно меньше.
Мощность Ре может быть выражена также и через электрические величины двигателя: Ре=т2Е21г cosy2, (20)
где
Ε2=πΫ2 w2k2f10 ·10~8 вольт. (21)
Из равенств (14), (1), (20) и (21) следует, что момент (в кгм)
М=7,22 тмЛ2рЬФ cos ψ2 10-s =
= Ы2Ф cos φ2 · (22)
Между потоком, сцепляющимся с некоторым витком, и эдс этого витка имеется сдвиг по фазе на 90°. Т. к. между током 1г и эдс витка имеется сдвиг по фазе на угол φ2, то между током J2 и потоком Ф получается сдвиг по фазе на угол (90+<р2); поэтому в формуле (22) можно заменить cos φ2 через sin (90+φ2) или sin (Ф,12); отсюда
М=Ы2 Ф sin (Ф, 12). (22а)
На поверхности и в толще зубцов статора и ротора получаются еще добавочные поверхностные и пульсационные потери Qd. благодаря колебаниям величины поля от наличия зубцов. Эти добавочные потери Qd_ действуют на уменьшение полезного вращающего момента точно так же, как и механические потери Qm, поэтому
Рр. = - Qm = Р% ~ Qm Qd. (15а)
Подведенная к статору мощность Рг больше мощности Ре на величину джоулевых потерь в статорной обмотке Q., и потерь в железе на токи Фуко и гистерезис поэтому Pi=mJJi cos φι=Pe+ QM.i + QM. =
— Pe 4* 3 I Bi + QM, (23)
г) Максимальный вращающий момент. Заменяя в выражении (22) для вращающего момента М ток 12 и cos<?>2 их значениями из ф-л (8) и (12) и принимая во внимание формулу (21), получаем, что
М-bфв^-*фщЫ&·· ™
Пренебрегая относительно небольшим изменением потока Ф под влиянием первичных падений напряжения под нагрузкой и заменяя /сФ2 через постоянную С, получаем, что
М=С Hirki ’ (24а)
При небольших скольжениях член s2xl ничтожно мал по сравнению с Щ, поэтому можно считать знаменатель постоянным и момент М пропорциональным скольжению. При дальнейшем увеличении скольжения знаменатель начинает возрастать, и момент увеличивается не пропорционально скольжению, а несколько меньше. При нек-ром определенном скольжении момент М достигает максимума и затем начинает уже уменьшаться. Для нахождения максимума момента нужно взять в выражении (24а) производную от М по s и приравнять ее нулю:
R2
dM=- С -*?’ Л‘=0. (25)
Отсюда условие имеет вид:
для максимума момента в-11· (26)
Этот максимум наступает при тем большем скольжении, чем больше отношение R2 к ж2. Из выражения (26) можно заключить, что ё=1· (эт)
Т. о., вращающий момент достигает максимума, когда реактивное сопротивление sx2равно активному Д2. Подставляя значение s из выражения (26) в формулу (24), получаем для максимального момента следующее выражение:
ds
(?
М.„
2xs
(246)
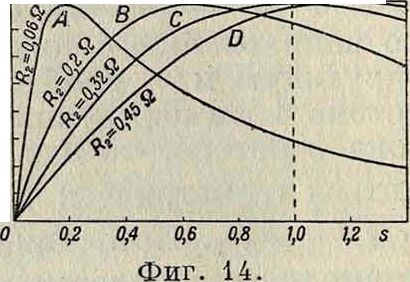
В это выражение не входит R 2, поэтому Мптхне зависит от сопротивления ротора; но т. к. R2 входит в общее выражение (24) для момента, то величина В2 влияет лишь на то, при каком значе- Двигатель Тормоз нии s момент М принимает максимальное значение. fi На фигуре 14 представлена зависимость М от скольжения s для одного из двигателей при четырех различных значениях R 2, что достигается включением в ротор добавочного сопротивления. Хотя все кривые различны, но для всех значение Мтах одно и то же. Т. к. по достижении максимального момента двигатель теряет устойчивость, то этот момент носит название опрокидывающего. д) Начальный вращающий момент. На практике часто требуется, чтобы, двигатель при пуске в ход развивал Мтах. В этом случае, согласно формуле (27), R2 Д· б. равно ж2, т. к. s=l. Это достигается включением в цепь ротора такого добавочного сопротивления, чтобы Rn.+ + jB2=х2. Для двига-
Т. к. в этом выражении при М неравном нулю знаменатель не м. б. бесконечно большим, то числитель должен равняться нулю.
Фигура 16.
Фигура 15.
теля фигура 14 в этом случае получается кривая момента С. Если в формулу (24) подставить s=1, то получится выражение для начального момента:
м«=кф*тЩ; <24в>
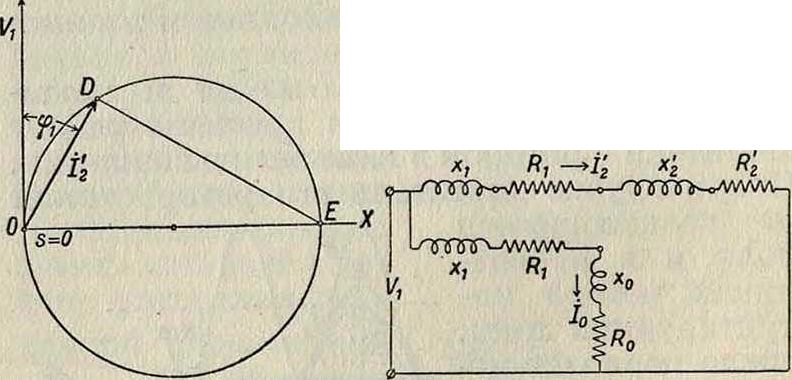
е) Приближенная круговая диаграмма. Если сопротивления В1;х1г Л2, ж 2, R о и ж о постоянны, то при изменении скольжения s конец вектора тока 1г описывает окружность. Наиболее простой способ получения круговой диаграммы вытекает из приближенной эквивалентной схемы (фигура 15), отличающейся от точной схемы (фигура 7) тем, что намагничивающий контур выносится на первичные зажимы. Благодаря этому нагрузочный ток 12 становится независимым от тока холостого хода 10. В этом случае
П=-
V,
Г
-(χι + χί)1
:=^· (28) 2п у (»-?)·
Ток Ц составляет с напряжением V1 угол φΐ9опр ед ел я емый соотнощени ем
Уг + xt_ __ Χχ + Xt (29)
sin φ1 =
Zfi
~j ^ --3“ (^l T .^l)
При s=0, sin <Pi0=0 и 9?!=0.
Проведем (фигура 16) перпендикуляр OX к направлению тока Г2 при s=0 и восстановим из конца D вектора тока OD=12 при каком-либо произвольном значении s перпендикуляр к линии O.D до пересечения с линией ОХ в точке Е. Докажем, что для любого Г2ОЕ=Const. Действительно, принимая во внимание ф-лы (28) и (29), имеем:
OD г.
ОЕ=-
-^AZJL— Х±= Const, (30)
2„(Χ!+Χί) х«. 4
sin?!! sin φ.
так как в выражение для ОЕ не входит s. ОЕ называется идеальным током короткого замыкания. Прибавляя геометрически к
в масштабе синхронных ватт также и вращающий момент двигателя. Кпд двигателя
4= £ (34)
Скольжение двигателя, принимая во внимание формулу (16),
g=m,ao·^ _ (35)
1 е
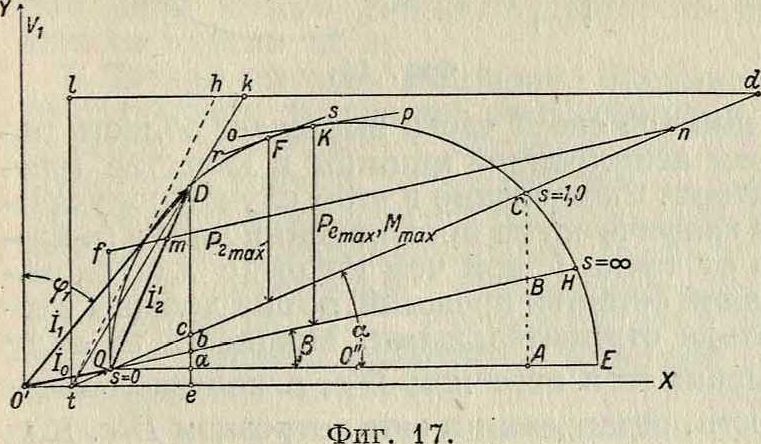
Все эти величины м. б. найдены и из круговой диаграммы (фигура 17). Точка С соответствует току Цк_ короткого замыкания (s=1); поэтому, согласно формуле (30),
*8α=Τφ+Τφ” ν, ^ + Ε^ = (36)
= k OE(R1 + RQ.
Деля вектор СА точкой В на отрезки и ВА, пропорциональные Рог и вектору_тока 0D =12 вектор тока холостого хода 00=1 о, получаем полную приближенную круговую диаграмму для результирующего первичного тока: 11=Г„ + 10
(фигура 17).
ж) Мощности и моменты в круговой диаграмме. Согласно формуле (23), можно мощность, переданную со статора на ротор, представить в следующем виде:
Pe=P1-3IlR1-Qae=^р1~г(г2уя1-зци1~джл (3i) При увеличении скольжения потери на трение Qm. и добавочные Qd, уменьшаются и становятся равными нулю при s=l,0, но взамен этого с увеличением скольжения возрастают потери в железе ротора Q0K.2; поэтому можно приближенно принять, что Qx.2 + Qm. + Qd.= esConst. Обозначим сумму потерь ЗЦЯг+ + Qm.2 + 6ж.2 + Qm. + Qd. через Q 0 и отнесем все эти потери к цепи намагничивающего контура; тогда можно считать, что
Р^Рг-Sir^JBi-Qo (32)
Р2=Ре-3(Ц)·Щ. (33)
При постоянной частоте /у мощность Ре, переданная со статора на ротор, выражает
СВ
R2, имеем: tg β=k ОЁ · йр (87)
tg α - tg β=k ОЕ й. (38)
При коротком замыкании вектор АС выражает в масштабе первичной мощности джоу-левы потери в первичной и вторичной цепях:
АС=к · (1,£.)2 · (Ri + RQ; (39)
В А=к (Г2К.У Rp, (40)
ВС=к (Г2К.У Щ· (41)
Принимая во внимание ф-лы (36), (37), (38) и то, что отрезок Оα=
о Р‘ шГ
, получаем, что для вектора 12=OD при любом скольжении s отрезки ас, аЬ и bс выражают соответственно в том же масштабе суммарные и отдельные джоулевы потери в обмотках статора и ротора; поэтому ас=Оа tga=k OD2 · (Рп + йг) =
= k (ZQ2 (Д, + IQ; (39а)
аЬ=Оа tg β=к OD2=k(I2Y Ry, (40a) be=Oa(tga—tgβ)=k OD* В2=к(ЦУР4· (41a)
Вектор ea выражает в том же масштабе потери холостого хода Q0. Т. о., первичная мощность Рг выражается вектором De; мощность, переданная со статора на ротор Р,. и момент в синхронных ваттах—вектором Db; мощность на валу двигателя Р 2—вектором Dc.
Скольжение
s = тг-СгУ-Ш J Ьо_. (Зфа)
Ре 9Ь
Коэффициент полезного действия
(35а)
Р, Ре з) Определение скольжения из круговой диаграммы. Проводим линию Of перпендикулярно к линии ОО", проводим далее линию fn параллельно О В и получаем точку m на пересечении линии fn и OD. Тр-к Оbс подобен тр-ку Ofn,
поэтому -^4г=~-· Треугольник ObD подо-
О b fn _ _
. _, Ob mf
бен треугольнику Ofm, поэтому -_^-=~=f *
Перемножая эти равенства, получаем:
bс __ /ш bD fn
Если разделить линию fn на 100 частей, то отрезок /м дает значение скольжения s в %. Таким способом можно легко определить скольжения, соответствующие различным точкам круговой диаграммы. Точка С соответствует скольжению s=l, точка Н—скольжению «А: рое точка О—скольжению s=0. Скольжение и точка круговой диаграммы К, соответствующие Мт(т, получаются проведением касательной ор к кругу параллельно линии ОН,. соединяющей точки s=0 и s=± со. Точка Τ’, соответствующая максимальной мощностиРе> в,яжполучается проведением касательной rs параллельно линии ОС.
и) Определение кпд из круговой диаграммы. Продолжаем линию СО до пересечения с осью абсцисс ОХ в точке t и проводим через эту точку линию tl перпендикулярно к линии 00", то есть в данном случае параллельно оси ординат 0Ύ. Проводим линию Id параллельно оси абсцисс ОХ и продолжаем линию W и Тс до пересечения с линией Id в точках к и d.
Тр-к tec подобен тр-ку fid, поэтому 44==.
te Id
Тр-к We подобен тр-ку tlk, поэтому — =» Ϊ.
De U
Перемножая эти равенства, получаем
De Id
откуда
Id - Ik hd De-се Нс Td Id De De ~ ^ ’
Если разделить линию Ы на 100 частей, то отрезок fed даст значение кпд в %. Точка I соответствует ч=0, точка h, получаемая на продолжении касательной к кругу из точки t, соответствует vmax.
к) Влияниесопротивленияро-тора на начальный момент. На-/: чальный момент вы-
: ражаетея вектором
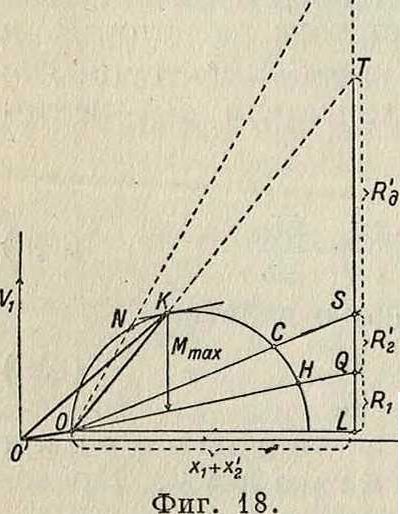
СВ (фигура 17). Если отложить от точки О параллельно оси абсцисс сумму хх + + х2 (фигура 18) и от конца этого отрезка восставить перпендикуляр,то продолжения линий ОН и ОС отсекут на нем отрезки SQ i; и QL, равные в том же масштабе сопротивлениям R2 и Bj.
При увеличении вторичного сопротивления с помощью введения добавочного сопротивления R0_ точка короткого замыкания перемещается вверх по кругу, благодаря чему возрастает и начальный момент. Если увеличить сопротивление Rd. до значения, равного ST, то точка, короткого замыкания станет в положение К опрокидывающего момента М,тх,
и двигатель будет пускаться в ход при максимальном вращающем моменте.
5. Асинхронный генератор. Асинхронная машина работает от точки короткого замыкания s= 1,0 до точки холостого хода s=0 в режиме двигателя. Если при помощи постороннего двигателя увеличить ее скорость выше синхронной, то в этом случае ротор будет вращаться скорее поля с отрицательным скольжением s < 0, благодаря чему изменяется направление тока в проводниках ротора и машина переходит в режим работы генератора. В данном случае изменяется знак вторичного тока 12, компенсируемого гл. обр. активной составляющей первичного тока, 1Х, поэтому двигатель продолжает работать с отстающим cos φ, получая намагничивание из сети. Круговая диаграмма (фигура 19)
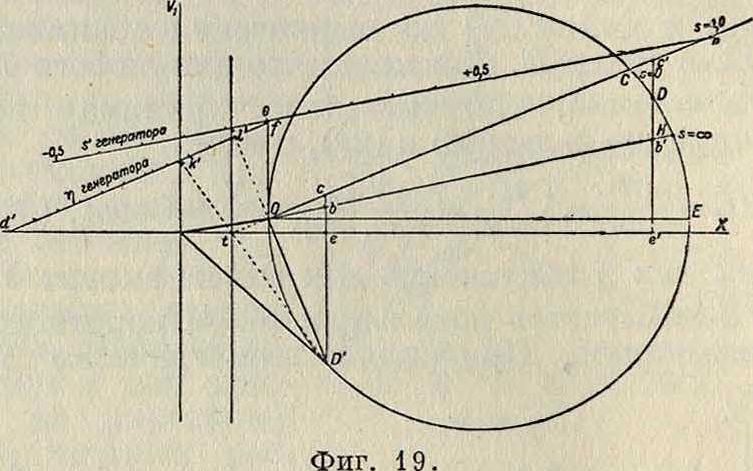
в нижней своей части выражает область работы асинхронной машины в качестве генератора. Скольжение в этом случае получается графически на продолжении линии fn влево от точки /, причем масштаб для скольжений остается прежний, но они должны считаться отрицательными. Мощность на валу выражается отрезком Dc, а полезная мощность, отдаваемая в сеть, отрезком De. Кпд
ГУе выражается отношением η=—. Для полу-
Dc
чения кпд из графическ. построения нужно провести линию Id параллельно линии ОС, соединяющей точки s=l,0 и s=0, до пересечения с линией tl и осью абсцисс. Если разделить линию Id на 100 частей и провести через конец вектора тока D линию Dtk до пересечения с линией Id, то отрезок kd даст кпд в %.
Асинхронные генераторы находят применение на небольших ветросиловых и гидроэлектрических станциях, т. к. пуск в ход их чрезвычайно прост и не требует синхронизирующих устройств. Кроме того, свойство асинхронного двигателя переходить в режим генератора при вышесинхронной скорости используется для рекуперации энергии на электрич. ж. д. при тяге трехфазными двигателями, а также при подъемных устройствах. Преимуществом асинхронного генератора по сравнению с синхронным является его простота и дешевизна, но недостатком является работа с отстающим cos φ, т. к. асинхронный генератор намагничивается той же самой сетью, которой он отдает энергию. Последний недостаток м. б. преодолен при применении к асинхронному генератору трехфазного возбудителя (смотрите далее—о фазовых компенсаторах), благодаря чему генератор может работать не только при cos φ=1, но даже и при опережающем cos φ.
6. Электрический тормоз. Если вращать асинхронный двигатель против направления вращения поля (s > 1,0), то он будет работать в режиме электрич. тормоза, поглощая электрическую энергию, подведенную из сети, и механич. энергию, подведенную к его валу. На .круговой диаграмме эта область работы выражается отрезком круга между точками СиЯ, со скольжением s=1,0hs=±oo (фигура 17, 18 и 19). Для какой-либо точки D (фигура 19), находящейся в области тормозного режима,подведенная электрич. мощность выражается отрезком De, момент на валу— отрезком Db и мощность, подведенная к валу механич. путем,—отрезком Dc. Если при помощи увеличения вторичного сопротивления перевести точку со скольжением s=l,0 в точку N (фигура 18), то при скольжении, соответствующем точке К, двигатель будет развивать наибольший тормозящий момент.
Электрич. тормоз находит себе применение, например, при торможении подъемных механизмов при спуске груза или для быстрых остановок мощных двигателей с маховиком, для чего переключением двух фаз первичной цепи можно заставить двигатель вращаться против поля.
7. Точная круговая диаграмма. Приближенная круговая диаграмма не содержит в себе особо значительных погрешностей и дает достаточно точный результат при применении ее к хорошим двигателям с относительно небольшим намагничивающим током и не слишком значительн. реактивными сопротивлениями хг и ж2. Неточность этой диаграммы, однако, становится заметной при применении ее к мелким двигателям (например до 1 kW), у которых эти величины становятся относительно большими, благодаря чему центр круговой диаграммы О" получается не на линии ОЕ, а несколько выше. Если исходить из точной эквивалентной схемы (фигура 7), то конец вектора тока и в этом случае описывает окружность.
Существуют различные способы для построения точной диаграммы, например Оссана (Ossana), Лакура (La Cour) и др., но они отличаются значительной сложностью, не оправдываемой повышением точности получаемых результатов. Если при построении исходить из данных опыта холостого хода и короткого замыкания, то в этом случае производится автоматически правильно учет влияния намагничивающего контура по схеме фигура 7, и поэтому отпадают затруднения, связанные с применением приближенной схемы фигура 15. По этим опытам, векторы тока 10и7к. строятся след. обр. (фигура 20). Соединяют концы этих векторов линией ОС и в ее середине F восставляют перпендикуляр FO". Соединяют точки 0 и С прямой и из середины М дуги КО проводят линию МО" параллельно оси абсцисс ОХдо пересечения с линией FO" в точке О", которая и будет центром круга, проходящего через точки О и С. При таком построении центр круга, по сравнению с фигура 17, лежит выше линии ОЕ. Это построение достаточно точно, если
Rx^ R2 и хх^х^. Дальнейшее построение весьма сходно с приведенным выше построением для приближенной диаграммы.
Полезная мощность выражается отрезком Dc, параллельным касательной к кругу в точке О, наклоненной вследствие повышения центра О" к вектору напряжения Для нахождения точки круга со скольжением s=±oo опускают перпендикуляр из точки С для s=l,0 на ось абсцисс и отрезок С А делят на части СВ и В А, пропорциональные .RiH R2. Продолжение линии ОВ пересекает круг в точке Н со скольжением s= + оо. Момент вращения определяется отрезком Db, параллельным касательной О/. Первичная мощность выражается отрезком De. Скольжение и кпд определяются в точной диаграмме подобным же образом, как и в приближенной, с той разницей, что линии Of
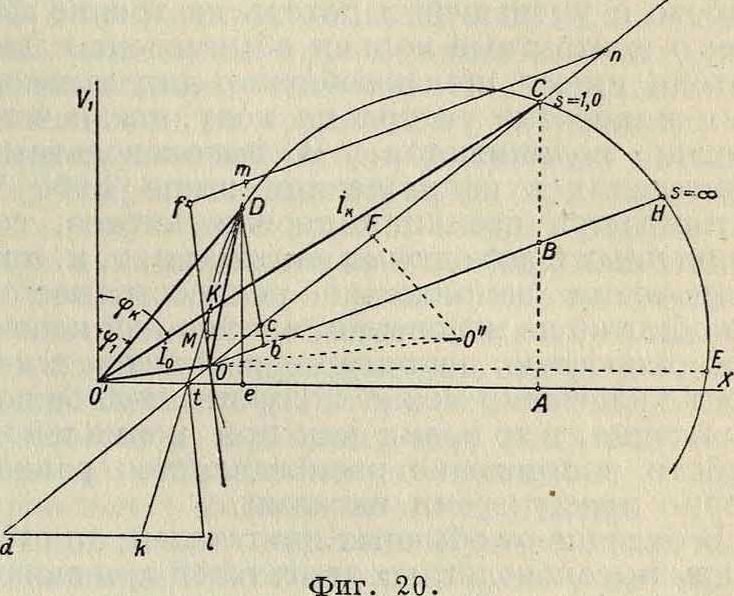
и й, параллельные оси ординат на фигуре 17, в точной диаграмме фигура 20 должен быть параллельны касательной к кругу в точке О холостого хода при s=0.
8. Пуск в ход асинхронных двигателей. В на а чальный момент пуска в ход cos <р2=—;——
У R*+xI
относительно весьма невелик, так как х2 в несколько раз больше R2. Несмотря на то, что при пуске в ход ток в несколько раз больше нормального, вращающий момент получается непропорционально малым по сравнению с кратностью пускового тока. Введением добавочного сопротивления при пуске можно одновременно уменьшить пусковой ток и увеличить cos φ и пусковой момент. Если Д2-ЬД). =ж2, то, согласно формуле (26), пусковой момент достигает максимального значения при снижении пускового тока приблизительно на 40%. После того как двигатель пришел во вращение и s<l,0, величина Rd уже не соответствует значению МтаХч Поэтому Вдж при уменьшении скольжения s нужно непрерывно уменьшать, поддерживая, согласно формуле (26),соотношение==sk2—Д2. Непрерывное изменение Rd± в двигателе с кольцами достигается лишь посредством жидкостных реостатов, при применении же металлич. реостатов изменение Rd. производится ступенями. В случае ступеней при пуске момент достигает значения Мтахи затем начинает снижаться. После выключения какой-либо ступени сопротивления он
Фигура 21.
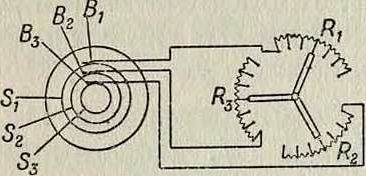
снова резко возрастает до Мтпх, затем снова снижается и т. д. Фазовая обмотка ротора трехфазного асинхрон. двигателя выводится на контактные кольца Slt S2 и Ss с наложенными на них щетками Blt В2 я В3, к которым присоединяется пусковой реостат с добавочными сопротивлениями Ru И2 и R3 (фигура 21).
9. Включение и выключение асинхронных двигателей. Асинхронные двигатели присоединяются к сети включением трехполюсного рубильника, без добавочных сопротивлений в статоре. Если ротор имеет фазовую обмотку, то сначала полностью вводят пусковой реостат ротора и затем, после включения статора, уменьшают сопротивление ротора до полного замыкания его накоротко. Для уменьшения сопротивления вторичной цепи при работе и уменьшения потерь на трение щеток о контактные кольца обыкновенно двигатели имеют приспособления для замыкания накоротко ротора на ходу, после чего щетки поднимаются. В высоковольтных двигателях с напряжением выше 3 000 V усиливается изоляция первых витков, соединенных с выходными зажимами, т. к. при включении напряжение распространяется по обмотке не мгновенно, а с некоторой конечной скоростью; поэтому первый виток в момент включения может получить полное напряжение, в то время как при нормальной работе напряжение распределяется равномерно между всеми витками.
В отличие от обычных двигателей, для защиты высоковольтных двигателей при включении применяют ступенчатые выключатели, при помощи которых между сетью и статором предварительно включается омическое или реактивное сопротивление, к-рое затем замыкается накоротко. Кроме того, до включения статора нужно ввести в ротор полное сопротивление пускового реостата, к-рый поэтому, в случае высоких напряжений, обычно делается без холостого контакта. При выключении двигателя сначала вводится все сопротивление пускового реостата, после чего уже отключается от сети статор. Благодаря этим мерам уменьшаются перенапряжения в обмотке статора.
Если ротор имеет короткозамкнутую обмотку, выдерживающую пусковой ток при полном напряжении, то он включается в сеть простым включением статора. В момент включения вращающееся поле двигателя создается не мгновенно, а путем нек-рого переходного режима. В период этого переходного режима получается неподвижное поле Фп, которое затухает согласно ур-ию:
Фп=- Фе-“*(, (42)
где Ф—амплитуда вращающегося поля и ~ равна постоянной времени кривой затухания. В момент включения ί=0, и поэтому Фй= —Ф, то есть неподвижное поле Фп равно амплитуде вращающегося поля Ф. Если пустить двигатель в ход, выключить и затем снова включить его статор при почти полной скорости ротора, то в этом случае поле Фп индуктирует Iа =
в роторе ν:
i Л| + зс;
где V, —первичное напряжение, приведенное к вторичной цепи. Если приведенные сопротивления В2 ях2приблизительно равны сопротивлениям Rxи хг, то толчок тока будет приблизительно в два раза больше, чем при нормальном коротком замыкании. На фигуре 22 представлены осциллограммы тока ротора и статора при таком включении.
10. Особые способы пуска короткозамкнутых двигателей, а) Переключение со звезды на треугольник (фигура 23). При нормальной работе 3 фазы соединяются в тр-к, а при пуске в ход они с помощью переключателя U соединяются на звезду. Благодаря этому напряжение на концах каждой фазы и ток в ней уменьшаются в отношении 1: /3. Т. к. пусковой момент, согласно формуле (24в), пропорционален квадрату потока Ф2, то при звезде он получается в три раза меньшим, чем при тр-ке; сила тока из сети при звезде получается также в три раза меньшей, чем при тр-ке. Этот способ дает возможность переключением на звезду при малых нагрузках получить более благоприятные условия работы двигателя в отношении кпд и cos <р, чем при тр-ке (смотрите далее—о регулировании скорости изменениемча-стоты и напряжения).
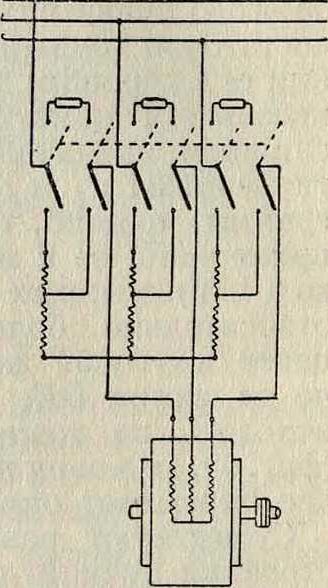
б) Пуск в ход при помощи а в-то трансформа т о -р а. Автотрансформатор (фигура 24) дает воз-
ток, силою (43)
Ток ротора

Ток статора
Фигура 22.
•Μ=у
Фигура 23.
Фигура 24.
можность, подобно переключателю со звезды на тр-к, уменьшать одновременно пусковой ток и момент; но, в то время как первый имеет определенное отношение между величинами пускового и рабочего положений, автотрансформатор позволяет изменять это отношение произвольным образом. Назовем через 1а силу тока в статоре, а через 1г и Vx—силу тока и напряжение сети. Фазовое напряжение на зажимах двигателя при пуске должен быть равно
ν^ν,Τα-, (44)
МС·
где I,.—сила тока короткого замыкания при напряжении 7j. При отсутствии потерь
| 3(Γ^)ΐα COS9V, | (45) |
| г _А.
В. |
(46) |
откуда
Задаваясь значением одной из величин тока
Ix или Ια, можно определить другую, а также передаточное отношение автотрансформатора:
I%. _ "Wi + W2
т:~ v>* 9
(47)
где и и w2—числа витков первичной и вторичной цепи автотрансформатора. Вращающий момент двигателя будет уменьшаться пропорционально уменьшению тока из сети. в) Способ Гёргеса (Goerges). Каждая роторная фаза по этому способу выполняется из двух частей, А и В, с различными чи витков, которые при пуске в ход являются включенными друг против друга (фигура 25) т. о., что действующей является
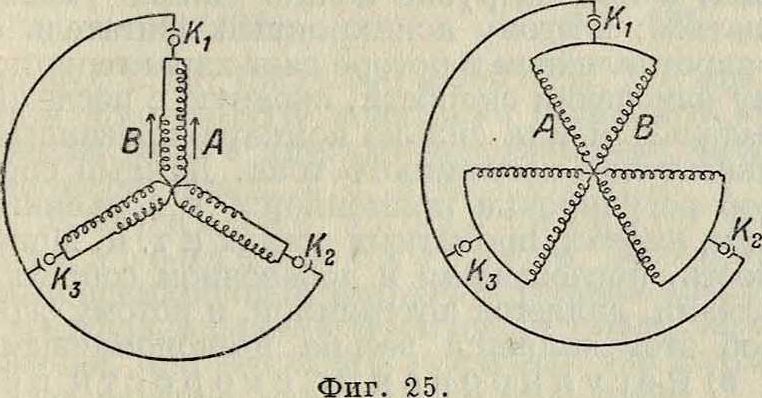
только разница индуктированных в них эдс. Обе части обмотки, А и В, уложены в одни и те же пазы и имеют провода одного сечения. Благодаря получающимся увеличенному активному и уменьшенному реактивному сопротивлениям двигатель при пуске развивает увеличенный начальный момент.
При достижении двигателем около 70— 85% своей синхронной скорости происходит замыкание накоротко зажимов Кх-К2-К3при помощи центробежного замыкателя. Двигатели Гёргеса строятся заводом «Электросила» до 85 kW.
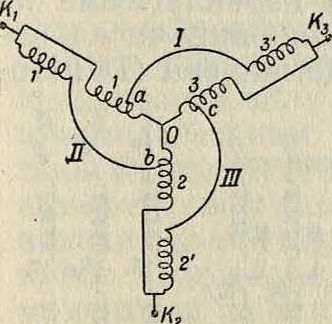
г) Способ Шенфера. Этот способ представляет модификацию способа Гёргеса. На фигуре 26 представлена одна из предложенных им схем. Каждая фаза состоит из двух частей с равными чи витков, заложенных в одни и те же впадины. В цепи 1 «О-а-З-З» действуеттоль-ко эдс, создаваемая частью обмотки Оа, так как эдс частей 3 и 3 взаимно уравновешиваются. Так как ток обтекает эти части в противоположных напраг· влениях, то.реактивное сопротивление цепи получается сильно уменьшенным, а активное—увеличенным, благодаря чему двигатель развивает большой пусковой момент. При достижении определенной скорости, нек-рые точки обмотки, например Кх-К2-К3, замыкаются центробежным выключателем накоротко на рабочее положение. Двигатель в 44 kW, выполненный по этой схеме, развивал при пуске 1,04 от номинального момента при кратности 1,67 пускового тока по отношению к нормальному. Если же пускать его при включении по рабочей схеме, то при кратности пускового тока 2,77 он развивает всего 0,81 от номинального момента.
Фигура 26.
д) Система Бушеро (Boucherot). Для улучшения условий пуска Бушеро разработал (с 1894 по 1900 г.) конструкцию короткозамкнутого асинхронного двигателя с весьма хорошими пусковыми и достаточно удовлетворительными рабочими характеристиками. Двигатель Бушеро имеет на роторе две беличьих клетки. Первая клетка, расположенная у поверхности воздушного зазора, имеет большое активное и относительно малое реактивное сопротивления, благодаря чему двигатель развивает при пуске большой вращающий момент. Вторая клетка, малого активного сопротивления, расположена значительно дальше от поверхности ротора и поэтому имеет большое реактивное сопротивление, благодаря чему при пуске она пропускает через себя относительно небольшой ток и развивает незначительный момент. При вращении двигателя частота f о и реактивные сопротивления вторичной цепи уменьшаются. При приближении к частоте скольжения номинальной нагрузки реактивные сопротивления становятся ничтожными по сравнению с активными, и нижняя клетка благодаря меньшему активному сопротивлению берет на себя главную часть вторичного тока и создает основную часть вращающего момента. Верхняя клетка при нормальной работе автоматически выключается из действия. Благодаря малому активному сопротивлению нижней клетки джоулевы потери вторичной системы весьма невелики, и поэтому кпд двигателя Бушеро не уменьшается по сравнению с кпд нормального асинхронного двигателя.
Недостатком двигателя Бушеро является уменьшенный на несколько % cos φ по сравнению с cos<p нормального двигателя, что получается благодаря повышенному реактивному сопротивлению нижней клетки. Уменьшение cos <рь двигателя Бушеро по отношению к cos φα исходного асинхронного двигателя м. б. выражено для двигателей завода «Электросила» следующей приближенной формулой:
6COS<p, -1
cos <ръ =-^--
3-дом «Электросила» выполняются двигатели с номинальным, полуторным и двойным пусковыми моментами. Приближенное соотношение между пусковым моментом Мп. и пусковым током 1п. м. б. выражено следующим образом:
Μη.·ΜΗ. In.-In·
1.0 3,2—3,5
1,5 3,5—3,8
2.0 4,5—5,0
е) Двигатель с глубокими пазами. Этот двигатель имеет в своей основе тот же принцип, что и двигатель Бушеро, но конструктивно выполняется в виде одной беличьей клетки. Благодарявысоким проводникам ротора, утопленным в глубоких и узких пазах, в них развиваются значительные токи Фуко. Коэфф. Ка, равный отношению активного сопротивления проводника к омическому, весьма сильно возрастает, благодаря чему двигатель развивает большой пусковой момент. На фигуре 27 представлено распределение эффективной плотности тока G по высоте проводника в 6 см, заложенного
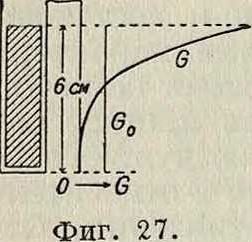
в глубокий паз, и средняя плотность тока в нем при постоянном токе G0. При частоте /i=50 пер/ск. и высоте 1г=1см, Ка= 1,1;
при той же частоте и h==2,5 сж, Ка=2,55. После того как двигатель достигнет номинальной скорости, частота в его роторе становится ничтожной, и Kasi ei 1,0 даже при высоком пазе, благодаря чему двигатель имеет высокий коэффициент полезного действия. Двигатели эти строятся фирмами SSW, GEC и другими.
II. Регулирование скорости асинхронного двигателя, а) Р е г у л и р о в а н и е скорости изменением частоты и напряжения. Скорость двигателя при нормальных условиях его работы определяется частотой fx. При питании двигателя от специального генератора (синхронного или коллекторного) имеется возможность изменять как частоту /1( так и напряжение Fj на его зажимах. В этом случае для различных моментов на валу М можно получить идеальные условия, если изменять напряжение Ftв случае относительно ненасыщенного двигателя по следующей зависимости:
ν,-τ/ψ,· <48>
Здесь V2 и М2—величины, соответствующие частоте /2> a Fx и Мх—соответствующие частоте fx- Если скорость связана определенной зависимостью с моментом на валу, то этим задается определенная зависимость напряжения от частоты. Например, при М—Const:
v_a и. ν,"Λ*
(48а)
при
El
м
vl
Ms ИЛИ
пр“ жЧ-:);
Vb
(486)
При указанной регулировке двигатель для различных скоростей будет работать при практически постоянных cos φ, кпд, абсолютном скольжении пс~пр. и перегрузочной способности МЕах. Если двигатель дол-
тп-
жен работать при постоянной частоте и различных моментах навалу, то для получения наилучших условий его работы в отношении кпд и cos ψ нужно регулировать напряжение на его зажимах по следующей зависимости:
(48г)
В частном случае, при возможности переключения с тр-ка на звезду, двигатель при звезде дает практически те же условия работы, что и при тр-ке, если момент на валу будет в три раза меньше. Т. к. при питании от общей сети напряжение Fx и частота /у являются неизменными, то в этом случае указанный способ регулирования скорости изменением частоты и напряжения является неприменимым. б) Регулирование скорости реостатом в роторе. Схема такого регу лирования ничем не отличается от схемы пуска посредством реостата в роторе (фигура 21). В этом случае применяются проволочные или водяные реостаты, рассчитанные на длительную работу. Если при регулировке момент остается постоянным, то ток ротора также не меняется, поэтому скорость двигателя будет зависеть от величины добавочного сопротивления. Этот способ аналогичен регулировке скорости шунтового двигателя при помощи реостата в цепи якоря. Если при введенном добавочном сопротивлении момент на валу изменяется, то изменяется и вторичный ток. В этом случае при холостом ходе скорость будет близка к синхронной, а при нагрузке начнет сильно уменьшаться; поэтому асинхронный двигатель с сопротивлением в роторе дает характеристику изменения скорости, сходную с последовательным или сильно компаундированным двигателем постоянного тока. Данный способ регулировки применяется в подъемниках, лифтах, прокатных станах и тому подобное. Мощность, поглощенная в добавочном сопротивлении, является потерянной, и потому способ этот является весьма неэкономичным. в) Регулирование скорости переключением числа полюсов. Синхронная скорость двигателя определяется соотношением (1):
поэтому, изменяя число полюсов, можно изменять в обратном отношении и скорость. Переключение числа полюсов м. б. достигнуто следующими способами: 1) получением двух различных чисел полюсов переключением одной и той же обмотки статора, 2) устройством на статоре двух обмоток на разные числа полюсов и 3) совместной комбинацией предыдущих способов. В двигателях с беличьей клеткой переключение числа полюсов производится только на статоре, в двигателях же с фазовым ротором необходимо производить переключение и на роторе. Наиболее просто производится переключение по первому способу для отношений чисел полюсов 2 :1 по системе Даландера (Dahlan-der). Обмотка в этом случае выполняется по типу нормальной катушечной (фигура 2), с полюсным делением, соответствующим большему числу полюсов. Каждая фаза состоит из двух частей, которые соедини- фигура 28.
ются звездой параллельно при малом числе полюсов р и последовательно — при большом числе полюсов 2р (фигура 28). Максимальный момент при 2р полюсах получается приблизительно в 2 раза меньшим, чем при р полюсах, а максимальная мощность—в 4 раза меньшей.
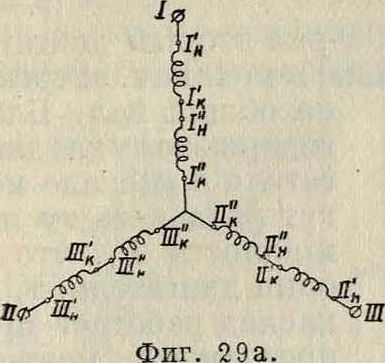
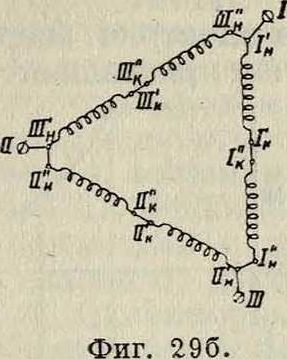
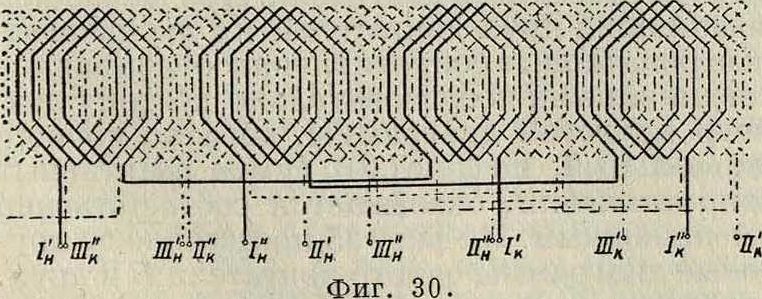
Если выполнить на статоре разрезанную обмотку постоянного тока по схеме SSW, то при включении ее по схеме фигура 29з получается 2р полюсов, а по схеме фигура 296—р полюсов. На фигуре 130 представлена схема такой обмотки для переключения чисел полюсов с 2р=8 на 2р=4. По сравнению с обмоткой
i п ш
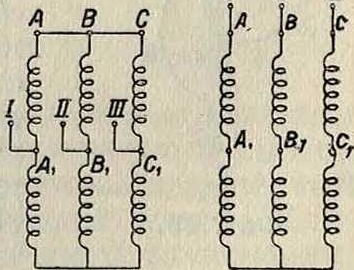
Даландера обмотка SSW имеет то преимущество, что она позволяет иметь один и тот же момент для обоих чисел полюсов.
Если выполнить на статоре две независимые обмотки с переключающимся числом полюсов, то можно получить 4 скорости,
например: 1 500, 750, 1 000 и 500 об/м. Двухфазные обмотки SSW позволяют выполнять переключение с другими отношениями чисел полюсов, например: 2:3, 3:4, 5:6 и тому подобное. г) Принцип экономичного регулирования скорости. Многофазный асинхронный двигатель устанавливает в пределах нормальной нагрузки такое скольжение, при к-ром его вторичная эдс покрывает падения напряжения этой цепи:
sE2=I2 /Ri + (sx2y ssI2R2. (8а)
При постоянном приложенном напряжении и заданном моменте на валу величина вторичного тока является практически вполне определенной:
7 =_J*_<
2 кФ cos <р2
Μ
кФ
; Const
(226)
Для экономичного регулирования скорости двигателя с сохранением шунтовой характеристики (то есть незначительного изменения скорости от холостого хода до полной нагрузки) можно применить введение в цепь вторичной системы добавочной эдс, частота которой должна автоматически совпадать с частотой /2двигателя при всех изменениях его нагрузки. Наличие этой эдс вызывает появление добавочного тока, изменяющего величину тока вторичной системы. Благодаря этому нарушается равновесие между моментом, приложенным к валу, и моментом, создаваемым взаимодействием вторичного тока 12 и потока Ф, вследствие чего двигатель начинает изменять свою скорость, и это изменение происходит до тех пор, пока не будет достигнуто новое положение равновесия между этими моментами при прежней величине тока 12.
Т. к. сопротивление вторичной цепи остается весьма незначительным, то потери вторичной цепи при данной величине тока сохраняются неизменными. Поэтому работа двигателя получается весьма экономичной при всех изменениях скорости, т. к. мощность скольжения, создаваемого введением доба вочной эдс, например от посторонней машины или добавочной обмотки, переходит к последней и м. б. использована тем или иным способом.
Предположим, что при неподвижном двигателе (s=1,0) вторичная эдс Е2=О А (фигура 31) и в эту же цепь добавлена эдс Ek=AD, равная г/2 ОА и сдвинутая от нее по фазе на 180°. Равнодействующая OD=О А — AD вызовет в системе значительный ток, и двигатель придет во вращение. Если двигатель не имеет момента, приложенного к валу (холостой ход), то он достигнет равновесия при sE2=Ek, то есть при s=+ 0,5. Ничтожная разница между эдс sE2 и Ек будет покрывать падение напряжения от тока холостого хода вторичной системы. Под нагрузкой эта разность
ΔΕ2=sE2 — Ек=1г · Z2
будет покрывать падение напряжения от тока, 12, определяемого приложенным моментом по формуле 226.
Предположим теперь, что эдс Ek=AD== 1/2 ОА совпадает по фазе с Е2, тогда, при s=l,0, результирующая эдс будет равна Ш)=ОА + AD (фигура 32). Двигатель начнет
| V, | V, | v, | |||
| а | б | a | 6 | ||
| L Ф | L· Ф | In Ф | |||
| U | I.av | ||||
| fir. | -0,5 | ||||
| S=1,0, | fis | S~+0,5 | S~=1,0 | ||
| * | и | A | |||
| Фигура 31. | Фигура 32. | ||||
| f. | |||||
о вращаться и достигнет равновесия, то есть sE2=Ek, при скольжении s=s—0,5, то есть при скорости выше синхронной. Т. о., изменяя эдс Ек по величине и направляя ее навстречу или на совпадение с эдс sE2, можно заставить асинхронный двигатель работать экономично при любых скоростях в заданных пределах выше-и нижесинхронной скорости. Если, как в данном примере, Ек^ + Е2 0,5, то изменение скорости может происходить в пределах 50% ниже- и вышесинхронной скорости. Добавочная электродвижущая сила Ек может получаться от добавочной обмотки или трансформатора (смотрите Коллекторные машины) или от специальной коллекторной машины, приключенной к кольцам ротора. Изменяя число витков добавочной обмотки или трансформатора или возбуждение коллекторной машины, можно изменять эдс Е); и т. о. получать желаемую регулировку скорости. На каждой ступени регулировки двигатель будет весьма мало изменять свою скорость от холостого хода до полной нагрузки, имея в этом отношении сходство .с шунтовым двигателем постоянного тока. д) Влияние величины и знака скольжения на cos <р. В асинхронном двигателе реактивное сопротивление sx2 вы-
зывает отставание тока 12 от эдс E?s, вследствие чего возрастает реактивная составляющая первичного тока Ix sin φχ и ухудшается cos φχ машины. Если при помощи добавочной эдс Ек уменьшить скорость двигателя, то реактивное сопротивление sx2 при том же моменте на валу и том же вторичном токе сильно возрастет по отношению к активному В2> благодаря чему уменьшится
cos φ.,= --, а вместе с ним и cos φχ.
l/P4 + (sx,)‘
Τ. о., двигатель при нижесинхронной скорости будет работать при одинаковом моменте на валу с более низким cos?^, чем при нормальных условиях без добавочной эдс Ек. Если же при помощи этой эдс перевести его на вышесинхронную скорость s<0, то при двигательном режиме знак момента и тока 12 сохраняется, но знак реактивного сопротивления —sx2 изменяется на обратный. Благодаря этому реактивное сопротивление —sx2 вызывает сдвиг первичного тока 1Х в сторону опережения, то есть это сопротивление начинает в этом случае играть роль емкости, улучшая cos φ двигателя. При вышесинхрон-ной скорости двигатель, с увеличением нагрузки от холостого хода, может начать уменьшать реактивную составляющую первичного тока Ixsin ψχ, а не увеличивать ее, как это бывает при обычных условиях работы двигателя. После того как возрастание нагрузки заставит двигатель перейти через синхронную скорость s=0 и он начнет работать далее при нижесинхронной скорости s > 0, это благоприятное влияние вторичного реактивного сопротивления уже исчезает, и оно вызывает соответствующее уменьшение cosy. При работе асинхронной машины с добавочной эдс Ек выше- и нижесинхронной скорости в генераторном режиме, реактивное сопротивление вторичной цепи, благодаря изменению знака тока i2 на обратный, оказывает противоположное влияние на cos <рг. В этом случае при нижесинхронной скорости реактивное сопротивление вторичной цепи увеличивает cos <рх, а при вышесинхронной уменьшает его.
Вышеописанное свойство асинхронных двигателей имеет существ, значение для понимания характера круговыхдиаграмм компенсированных и коллекторных шунтовых двигателей, а также каскады, соединения асинхронного двигателя и коллекторной машины. е) Каскадное соединение двух асинхронных двигателей. В этом случае во вторичную систему первого двигателя добавляется обратная эдс от второго двигателя. Т. к. оба двигателя работают на общий вал, то энергия скольжения первого двигателя является полезно использованной, и потому система дает хотя и ступенчатую, но достаточно экономичную регулировку скорости. При каскадном соединении оба двигателя должен быть соединены и электрически и механически (фигура 33). Синхронная скорость каскада равна б» Л
п., — —,
с-)с Pi + Рг где ρχ и р2—числа пар полюсов двигателей.
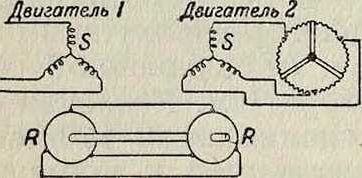
Фигура зз.
Двигатель, присоединенный к сети, работает со скольжением s=—ψ— ; поэтому подве-денная к нему мощность Рг при пренебрежении потерями преобразуется в части " — в механическую, а в части Р- · —
Ρι·
х Ρι + ρ2
в электрич. энергию, которая вторым двигателем превращается также в механич. энергию на общий вал. Благодаря этому два двигателя в каскаде могут развивать ту же один двигатель, то есть каскад работает при постоянной мощно-
| м/мИ 0 | 4 0,6 1,0 | |
Фигура 34.
имеют одинаковую мощность, но разное число полюсов, то они дают возможность получать три ступени скорости: две, соответствующие их синхронным скоростям 60 и тт ^ 60 л
η0.χ=
И пс =
Pi С2 Рг и одну для каскада. На фигуре 34 представлена зависи-
ск Ρι+Рг мость вращающего момента от скорости для двух двигателей с чи полюсов рг=6 и р2=4. Если выполнить, кроме того, каждый из двигателей на два различных числа полюсов, то число ступеней скоростей м. б. еще более увеличено.
Т. к. частота /а и напряжение F2 для второго двигателя меньше fx и Vx для первого Рг по о то поток Ф и намаг-
двигателя в раз
Ρι+Рг ничивающий ток второго двигателя приблизительно равны этим же величинам для первого. Намагничивающие токи обоих двига
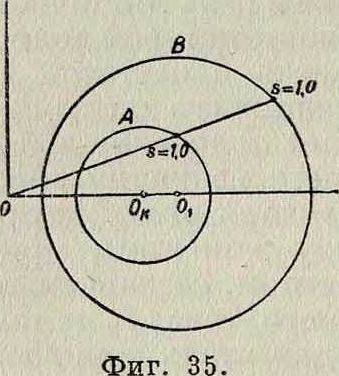
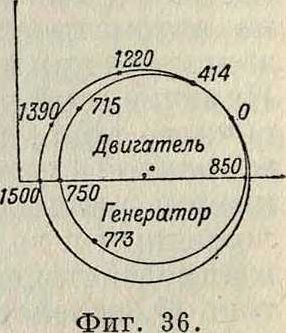
телей доставляются сетью, питающей первый двигатель, поэтому намагничивающий ток каскада приблизительно в два раза больше, чем для одного двигателя. При каскадном соединении двух двигателей их эквивалентные реактивные сопротивления оказываются соединенными последовательно, поэтому диаметр круговой диаграммы, обратно пропорциональный, по формуле (30), сумме реактивных сопротивлений, оказывается соответственно уменьшенным. На фигуре 35 представлены круговые диаграммы одного двигателя В и двух, соединен, в каскад А; из диаграммы видно, что перегрузочная способность и cos φ каскада меньше^ чем одного двигателя. На фигуре 36 представлены экспериментальные круговые диаграммы каскада для двух двигателей с чи полюсов 2р=4. Цифры на диаграмме соответствуют скоростям аггрегата. Каскадные соединения находят себе при-
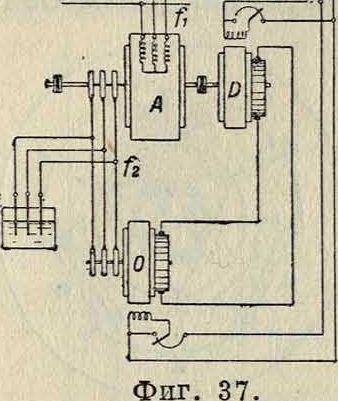
менение, например, при электрической тяге двигателями трехфазного тока. ж) Каскадное соединение асинхронного двигателя и одноякорного преобразователя (сист. Кремера, фигура 37).Ротор главного асинхронного двигателя А соединен в этом случае с контактными кольцамистороныпеременноготока одноякорного преобразователя О, сторона посто-
_ янного тока которого со-
т единена с коллектором двигателя постоянного тока D, механически связанным с валом главного двигателя А. Одноякорный преобразователь и двигатель постоянного тока получают возбуждение от независимой цепи постоянного тока. При изменении возбуждения двигателя D изменяется его напряжение. Между этим двигателем и преобразователем О устанавливается уравнительный ток, изменяющий момент двигателя Ώ. Вследствие этого нарушается равновесие между моментом, приложенным к валу, и суммой моментов, даваемых двигателями А и D на валу аг-грегата. Последний начинает изменять свою скорость, благодаря чему изменяются одновременно и частота /2 на кольцах преобразователя О и его скорость. В результате этих изменений система приходит к новому равновесному положению. Таким образом, каждому значению силы тока возбуждения двигателя D соответствует некоторая определенная скорость аггрегата. Эта система дает возможность регулировать скорость главного двигателя А в пределах от 4 — 5 до 40—15 % ниже его синхронной скорости. Двигатель Ώ должен быть рассчитан приблизительно на мощность максимального скольжения главного двигателя А; таким образом, при 30% регулировки он должен иметь мощность0,3от мощности двигателя И.Одно-якорн. преобразователь в этом случае рассчитывается также на мощность 0,3 от мощности главного двигателя А при соответствующем числе периодов /,=0,3/!. Система Кремера строится почти всеми крупными электротех-ническ. фирмами. В СССР эта сист. выполняется Харьковским электромеханич. з-дом.
Т. к. в системе Кремера мощность скольжения главного двигателя используется при помощи двигателя D, механически соединенного с валом главного двигателя, то эта система дает наилучшее использование всего аггрегата при работе его с постоянной мощностью на валу, хотя, конечно, в случае необходимости система Кремера может быть использована и для работы с постоянным моментом на валу. В этом случае при малых скоростях аггрегат оказывался бы неиспользованным; поэтому обычно применяется система, в которой двигатель постоянного тока соединяется не с валом главного двигателя, а с асинхронной машиной, работающей в режиме генератора при скорости приблизительно постоянной, причем энергия скольжения возвращается в первичную цепь. з) Каскадное соединение асинхронного двигателя с преобразователем частоты. Преобразователь частоты состоит из якоря, обмотка которого соединена с одной стороны с коллектором, а с другой стороны с контактными кольцами. Если к кольцам такого двухполюсного якоря подвести напряжение Vx многофазного тока с частотой ft и вращать якорь с числом /2 об/ск., то число периодов на щетках коллектора будет равно/,,. =/1 + /:2. Знак (+) соответствует направлению вращения якоря в направлении вращения поля относительно него, а знак (—) —обратному направлению. В последнем случае, при fx — /2, /„,.= 0, то есть на коллекторе получается постоянный ток. Напряжение на коллекторе будет равно напряжению на контактных кольцах при любых соотношениях частот /i “ fwr Для изменения напряжения на коллекторе нужно изменять напряжение на кольцах. Статор преобразователя частоты не имеет обмотки и служит только магнито-проводом для поля якоря. Статор может даже отсутствовать и быть замененным железным кольцом, надетым на якорь и вращающимся вместе с ним.
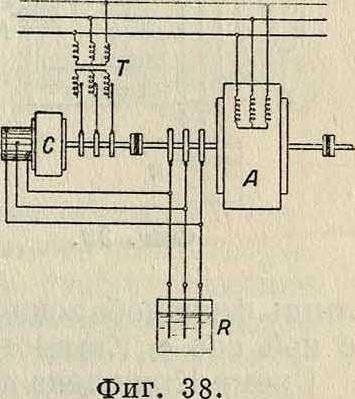
Преобразователь частоты С (фигура 38) дает возможность преобразовывать энергию частоты скольжения главного двигателя А в энергию частоты сети, возвращая ее обратно в первичную сеть, для чего он должен быть соединен на одном валу с главным двигателем А. Если при помощи трансформатора Т, питающего кольца преобразователя С, уменьшить напряжение на коллекторе до величины, достаточной только для покрытия омич, падения напряжения в роторе главного двигателя А, то последний достигает своей синхронной скорости, получая от преобразователя постоянный ток. При изменении с помощью того же трансформатора Т знака напряжения на коллекторе на 180° двигатель может переходить со скорости нижесинхронной на вышесинхронную и обратно. Правильный угол сдвига фаз между эдс ротора двигателя А и напряжением, даваемым преобразователем частоты С, устанавливается поворотом щеток на коллекторе. Схема фигура 38 дает возможность изменять скорость двигателя приблизительно до 10 % выше и ниже его синхронной скорости. Более высокая степень регулировки затрудняется тяжелыми условиями коммутации преобразователя частоты.
Система дает правильные условия использования асинхронного двигателя при работе его с постоянным моментом на валу и в таком виде выполняется фирмами AEG, Thomson Houston и др. Если же энергию скольжения передать с колец преобразователя частоты на синхронный двигатель, который соединен механически с главным двигателем, то система дает регулировку скорости при постоянной мощности. В таком виде она выполняется фирмой Westinghouse.
и) Каскадное соединение асинхронного двигателя с коллекторной компенсированной машиной с роторным возбуждением, системы Кожисека (Kozisek). Если в схеме фигура 38 заменить преобразователь частоты трехфазной коллекторной компенсированной машиной с возбуждением на роторе, то эта машина при нижесинхронной скорости главного двигателя будет работать в режиме двигателя, а при вышесинхронной скорости—в режиме генератора. Благодаря этому весь аггрегат дает наилучшее использование при работе с постоянной мощностью на валу. В коллекторной компенсированной машине щетки занимают вполне определенное место на коллекторе; поэтому регулировка фазы добавочной эдс по отношению к вторичной эдс двигателя достигается особым трансформатором фаз в виде асинхронного двигателя с заторможенным ротором (смотрите ниже—о потенциальном регуляторе).
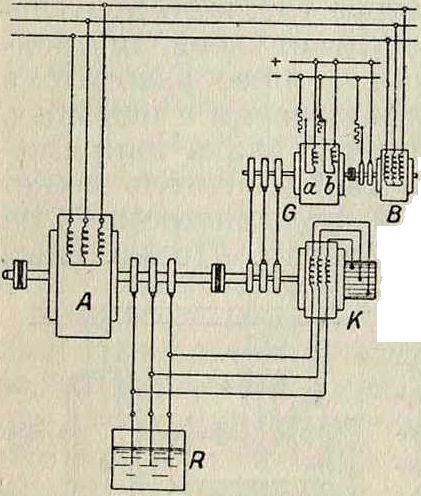
В отличие от схемы с преобразователем частоты здесь через контактные кольца проходит лишь незначительный намагничивающий ток, необходимый для возбуждения коллекторной машины. При более мощных установках желательно иметь на кольцах коллекторноймашинычастоту, более низкую, чем в первичной цепи, т. к. в этом случае можно получить несколько более высокое напряжение на коллекторе. В этом случае возбуждающий ток для коллекторной машины К получается от специального синхронного генератора—возбудителя G, приводимого во вращение синхронным двигателем В (фигура 39). Синхронный возбудитель выполняется с неподвижными полюсами и вращающимся якорем и имеет на статоре две обмотки возбуждения а и Ь, сдвинутые в пространстве на 90 электрич.градусов. Регулируя ток в одной обмотке возбуждения, можно изменять скорость главного двигателя, при регулировке второй обмотки изменяется лишь фаза добавочного напряжения и вместе с ней cos φ главного двигателя.
Схема Кожисека дает возможность регулировать скорость мощн. асинхронных двигателей до 10% выше- и нижесинхронной скорости. Эта схема выполняется фирмой SSW.
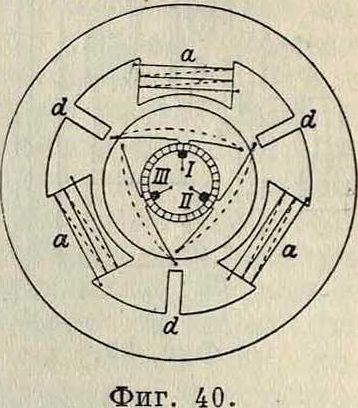
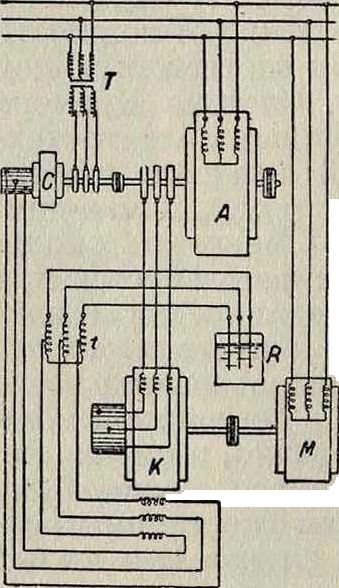
к) Каскадное соединение асинхронного двигателя с компенсированной ^коллекторной машиной с возбуждением на статоре (сист. Шербиуса). В данной схеме применяется трехфазная компенсированная коллекторная машина Шербиуса с явно выраженными полюсами и возбуждением на статоре. Эта машина соответствует машине постоянного тока, которая имеет на каждом двойном полюсном делении три явно выраженных полюса, возбуждаемых трехфазным током. Шаг обмотки ротора равен 120 электрическим градусам вместо 180°; поэтому оба коммутируемых в пазе витка, как верхний, так и нижний, попадают в пространство между главными полюсами а под коммутирующее поле добавочного полюса d (фигура 40). Машина имеет последовательные и шунто-вые добавочные полюса, поэтому она имеет совершенную коммутацию при изменении как нагрузки, так и частоты и напряжения. Установка по схеме Шербиуса, видоизмененная для получения вышесинхронной скорости фирмой GEC, представлена на фигуре 41. Здесь А—главный асинхрош ный двигатель, К—кол-лекторнаямашинаШер-биуса, М — асинхронная машина, соединенная на одном валу с машиной К, С—преобразователь частоты, Т—· трансформатор, питающий кольца преобразователя С, и R—пусковой реостат. Напряжение от колец двигателя А через секционированный автотрансформатор t подводится к шунтовой обмотке возбуждения коллекторной, машины К. Каждому ответвлению автотрансформатора ί соответствует определенный ток возбуждения и определенное напряжение коллекторной машины К и, следовательно, нек-рая определенная скорость двигателя А. При синхронной скорости напряжение на кольцах двигателя А равно нулю; поэтому машина К теряет возбуждение от колец двигателя А. Для перехода через синхронизм служит преобразователь частоты С, дающий необходимое возбуждение коллекторной машине К для работы при синхронной скорости и вблизи нее.
Система Шербиуса GEC дает возможность регулировать скорость двигателя до 25% выше- и нижесинхронной скорости. Выполняется эта система фирмами ВВС и GEC.
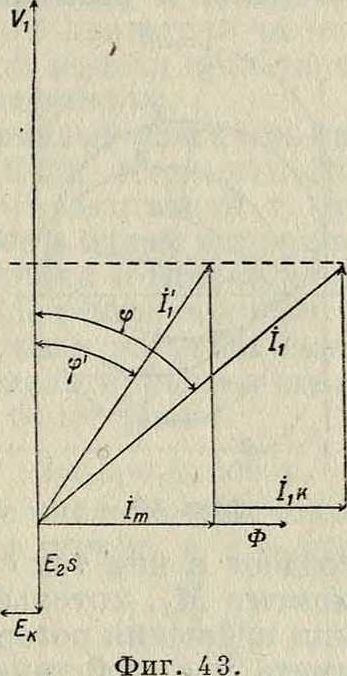
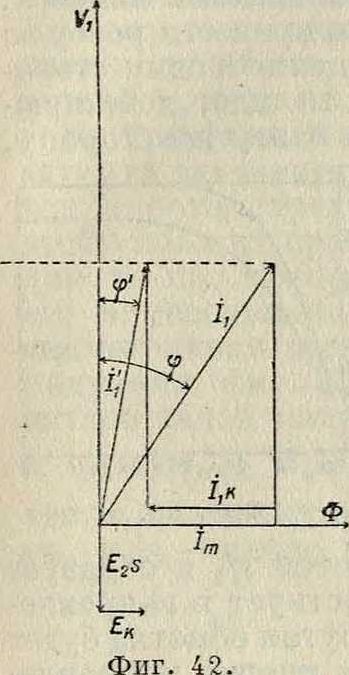
12. Регулирование cosφ асинхронного двигателя. а) Принцип регулирования cos φ. Если добавочная эдс Ек сдвинута от основной эдс sE2на 90°, то вызываемый ей ток!2,. совпадает по фазе или направлен навстречу магнитя, потоку Ф [т. e. sin (!2к., Ф) =0], поэтому, согласно формуле (22а), не может вызвать вращающего момента и изменения скорости. Так как при Уг=
= Const и поток Ф ~~ равен Const, то добавочная мдс, созданная током !2к. не может вызвать изменения Ф, тре-Фигура 41. бующего для своего под-держаниянекоторой вполне определенной мдс. Наличие добавочной мдс вызывает лишь соответствующее увеличение или уменьшение мдс, создаваемой током первичной системы. Т. о., вторичная цепь создает в первичной цепи добавочную
составляющую реактивного тока 11к., которая или совпадает с намагничивающим током 10(фигура 42) или сдвинута относительно него на 180° (фигура 43). В первом случае намагничивающий ток, доставляемый первичной цепью, уменьшается, a cos у двигателя улучшается, во втором же случае cosy ухудшается. б) Фазовые компенсаторы или возбудители асинхронного двигателя. Добавочная эдс, сдвинутая от основной на 90 электрич. градусов, м. б.
получена в системах, подобных применяемым для регулировки скорости, с помощью соответствующей регулировки сдвига фаз между этими эдс. Так как эта добавочная эдс должна преодолевать практически лишь активное сопротивление вторичной цепи двигателя, вызывая в ней необходимую намагничивающую мдс, то эта добавочная эдс может быть создана в весьма малой по своим размерам машине. Т. о., преобразователь частоты и коллекторные машины по системе Кожисека и Шербиуса м. б. использованы в качестве возбудителей или т. н. фазовых
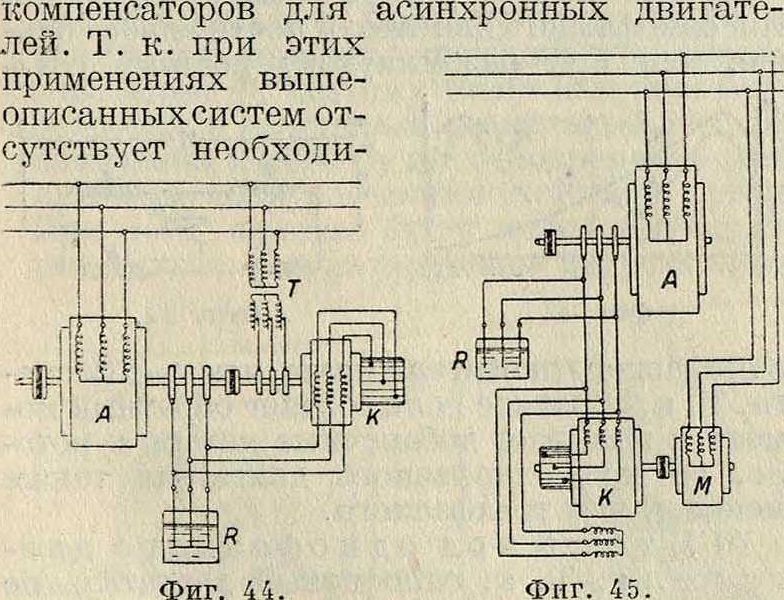
мость в получении регулировки скорости, то системы эти в своем выполнении получаются значительно проще, будучи предназначены только для режима работы при одной скорости. Изменение нагрузки в этом случае не вызывает необходимости в дополнительной регулировке. На фигуре 44 представлена схема SSW, выполняемая по системе Кожисека, а на фигуре 45—схема с шунтовым фазовым т. э. т. IX.
компенсатором, выполняемая фирмой ВВС по системе Шербиуса. Эти системы дают возможность асинхронному двигателю работать по круговой диаграмме с увеличенным диаметром. Благодаря этому, вместе с улучшением cos у одновременно достигается и увеличение перегрузочной способности двигателя, что в нек-рых случаях (например при прокатных станах) может иметь особо важное значение.
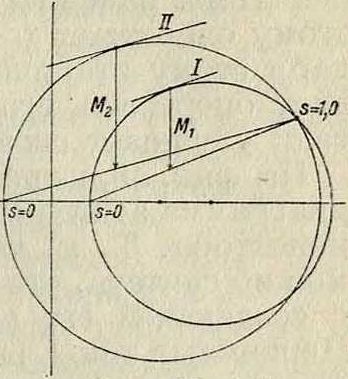
На фигуре 46 представлены круговая диаграмма фигура 46.
I — для асинхронного двигателя без компенсатора и диаграмма
II — при наличии шунтового компенсатора Шербиуса с отмеченными на них величинами опрокидывающих моментов Мх и М2.
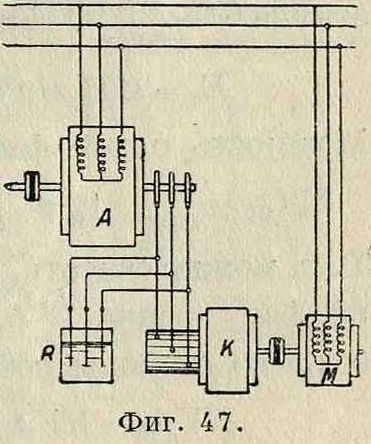
Фазовые компенсаторы по системе периодо-преобразователя и системе Кожисека являются механически связанными с валом главного двигателя посредством соединительной муфты в случае равенства чисел полюсов двигателя и компенсатора и посредством зубчатой передачи, если числа полюсов этих машин не равны. Шунтовой компенсатор не имеет необходимости в механической связи с валом главного двигателя и может быть приводим в движение отдельным небольшим двигателем любой системы, что дает этому компенсатору значительное преимущество перед двумя первыми. в) Фазовый компенсатор систе-м ы Л е б л а и а-Ш е р б и у с а. Особый интерес по своей простоте и дешевизне представляет фазовый компенсатор Леблана-Шер-биуса, который может применяться только в схемах для улучшения cosy. Этот компенсатор имеет якорь с обмоткой, соединенной с коллектором, щетки которого соединяются с кольцами асинхронного двигателя. В системе Леблана статор компенсатора не имеет обмотки и служит лишь магнитопроводом для поля якоря, а при системе Шербиуса статор заменен железным кольцом, насаженным на якорь и вращающимся вместе с ним. Компенсатор К приводится во вращение небольшим двигателем М, скорость которого не связана со скоростью главного двигателя А (фигура 47). При холостом ходе главного двигателя А компенсатор К не оказывает никакого действия на его работу и служит для замыкания вторичной цепи, играя в ней роль лишь нек-рого добавочного сопротивления. При нагрузке двигателя А его вторичный ток проходит через якорь компенсатора и создает вокруг него магнитное поле, медленно вращающееся в пространстве соответственно с частотой вторичной цепи (2. Если компенсатор неподвижен, то его эдс самоиндукции отстает на 90° по фазе от тока. Если якорь компенсатора вращается в
6
направлении вращения поля, то при синхронной скорости вращения эдс компенсатора равна нулю. Если вращать якорь компенсатора выше синхронной скорости, то эдс компенсатора изменяет свой знак на 180° и поэтому опережает ток по фазе на 90°. Благодаря этому вторичный ток двигателя начинает опережать его основную эдс, и двигатель улучшает свой cos ψ.
На фигуре 48,а представлена приближенная диаграмма асинхронного двигателя без компенсатора. Т. к. частота f2 очень мала, то можно считать, что ток 12 совпадает по фазе с создающей его эдс, и потому s_E2si 12Д2· Первичный ток 1Х равен геометрическ. сумме приведенного вторичного тока Гг и намагничивающего тока 1гп, поэтому ток 1Х отстает по фазе от напряжения Vxна угол ψ. На фигуре 48,6 представлена диаграмма при наличии компенсатора для случая, когда добавочное напряжение Ек позволяет получить полную компенсацию двигателя до cos<p=l. В этом случае ток 1Х опережает эдс sE2 на тот же угол ψ и создается геометрии, суммой эдс5-Е2и Ек поэтому при неизменном вращающем моменте, согласно формуле (22),величина вторичного тока должна измениться и будет равна
1=1й
21 COS ?>2
tit f,
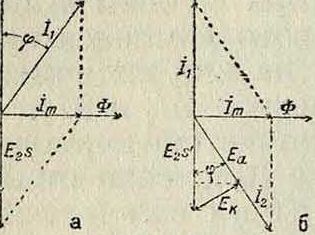
Фигура 4 8.
Величина основной эдс Еа I, К2
sE,=
двигателя
i Ш,
cos?> eos<p cos?* cosa?>
откуда s =. Напряжение компенсатора
Ек=sE2 sin φ =
«E,
tgf.
Мощность, одной фазы компенсатора
Ει-Ι,
Ίι1 21
SEo
cos<?
tg φ
__ JJ7J ]. b
cos<p 2 2 cos2 φ
tgy.
T. к. можно считать, что мощность двигателя на фазу равна то при компенсации
cos φ со стороны ротора
KVA,.=KVA л
S
η cos2 φ
tg?).
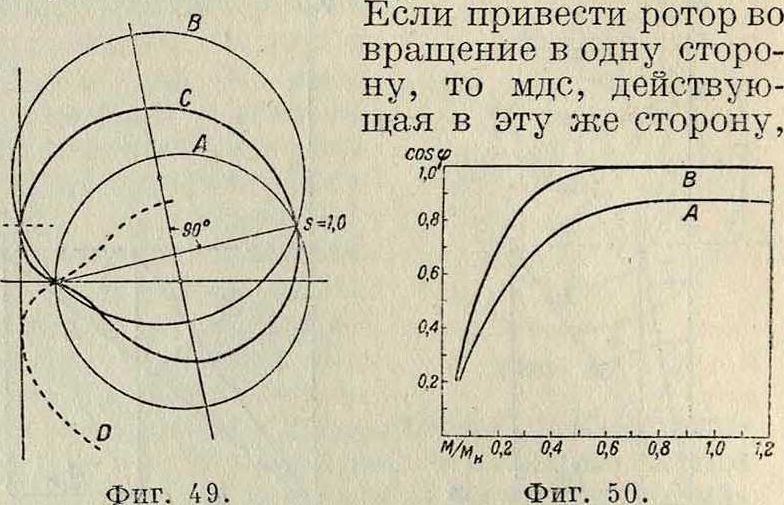
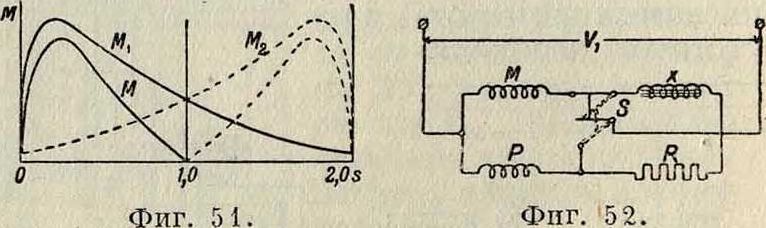
На фигуре 49 представлена круговая диаграмма А двигателя без компенсатора, В— круговая диаграмма с ненасыщенным компенсатором, дающим cos?>=l при полной нагрузке, и С—уплощенная диаграмма конца вектора первичного тока двигателя, дающего также cos?)=l при полной нагрузке. В последнем случае улучшение cos φ начинает наступать при меньших нагрузках, чем в случае ненасыщенного компенсатора. В обоих случаях кривая тока проходит выше, чем в круговой диаграмме А без компенсатора, поэтому наличие компенсатора повышает перегрузочную способность двигателя. На фигуре 50 представлены кривые cos<p двигателя при изменении нагрузки: кривая А— при отсутствии компенсатора, а кривая В— при наличии компенсатора.
13. Однофазный асинхронный двигатель, а) Принцип действия. Однофазный асинхронный двигатель имеет пульсирую щую мде, которая м. б. разложена на две мде, вращающиеся в противоположные стороны и имеющие равные амплитуды. Поэтому однофазная обмотка м. б. заменена двумя другими, питаемыми трехфазным током и соединенными т. о., что одна дает поле, вращающееся в одном направлении, а другая—в противоположном. При неподвижном двигателе обе мде действуют на ротор одинаковым образом, создавая в нем вращающие моменты, направленные в противоположные стороны и взаимно уравновешивающиеся.
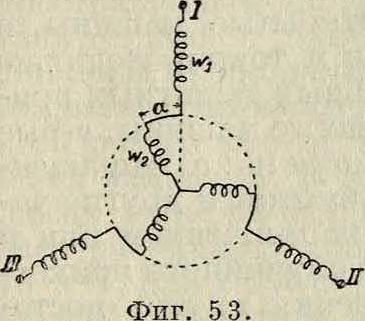
создает в нем ток с частотой sfx и образует момент Мх, который действует в направлении вращения ротора. Другая обмотка будет иметь мдо, действующую против направления вращения ротора и создающую в нем режим тормоза. Ток от этой обмотки будет иметь частоту (2—s)f1, которая образует момент М3, действующий против направления вращения ротора: На фигуре 51 представлены кривые вращающих моментов Мх и М2, построенные для скольжений от s=0 до s=2 относительно поля первой обмотки. Из этих кривых видно, что при s=l,0 оба момента уравновешивают друг друга; если же двигатель вращается в какую-либо сторону, то момент, увлекающий ротор в этом направлении, превышает обратный момент.
При замкнутом роторе намагничивающий ток однофазного двигателя почти вдвое больше, чем при разомкнутом; поэтому cos φ
однофазного двигателя ниже, чем трехфазного. Т. к. обратное поле создает обратный момент и вызывает добавочные потери в роторе, то кпд однофазного двигателя также меньше, чем трехфазного. б) Пуск в ход однофазного двигателя. Т. к. однофазный двигатель не развивает начального момента, то для пуска его в ход применяется вспомогательная пусковая обмотка, сдвинутая в пространстве относительно основной на 90°. Для получения сдвига токов во времени в обеих обмотках, в главную обмотку Р включается при пуске омич, сопротивление R, а во вспомогательную М—самоиндукция х (фигура 52). Т. к. обе обмотки сдвинуты в пространстве на 90°, а токи в них сдвинуты на угол, меньший 90°,
то в результате образуется эллиптическое вращающееся поле, создающее вращающий момент в направлении его движения. При пуске рубильник S ставится в верхнее положение, а при работе—в нижнее, обозначенное пунктиром.
Однофазный двигатель имеет также круговую диаграмму, дающую возможность получать его характеристики. Однофазные двигатели получаются заводским путем из моделей трехфазных, причем 2/3 пазов заполнены основной обмоткой и 7з — пусковой. Поэтому тип однофазного двигателя позволяет получать из данной модели приблизительно 2/8 мощности трехфазного.
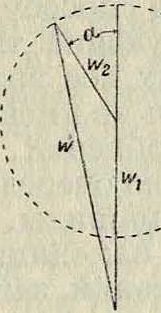
!4. Трехфазный асинхронный двигатель как катушка самоиндукции. Если соединить статор и ротор трехфазного двигателя т. о., чтобы поля их вращались в одном направлении, то при повороте ротора и закреплении его в неподвижном положении получается симметричная регулируемая катушка самоиндукции (фигура 53). Результирующее число витков такой катушки будет равно
w=}/(w1fc1)2 + (w,k2)2 + ^w1fc1w2fe3 cos α, где w-yk! — действующее число витков статора, w2k2 — число витков ротора и а— угол
Фигура 5 4.
сдвига между соответствующими осями катушек (фигура 54). Магнитный поток Ф такой катушки самоиндукции будет приблизительно равен —1— и будет изменяться
1/2
вместе с углом а. Соответственно оудет изменяться и намагничивающий ток, создающий поток Ф; поэтому такая катушка будет потреблять различный реактивный ток, при изменении которого будут одновременно изменяться и поля рассеяния статора и ротора. При а=0° система будет иметь наибольшее реактивное результирующее сопротивление
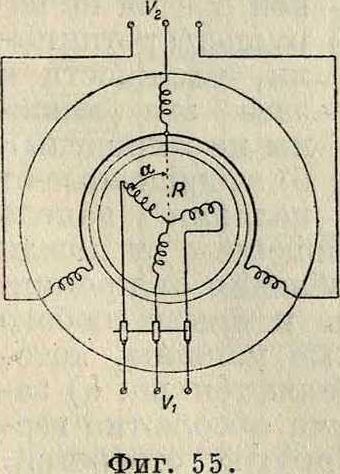
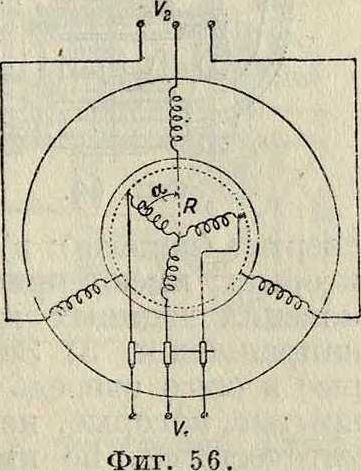
и потому будет потреблять наименьший реактивный ток. При α= 180°, наоборот, система будет иметь наименьшее реактивное сопротивление и соответственно будет потреб лять наибольший реактивный ток. Описанный выше тип трехфазной катушки самоиндукции особенно распространен в лабораторной практике.
15. Потенциальный регулятор. Если присоединить статор асинхронного двигателя к одной сети, а ротор—к другой, то при повороте ротора и закреплении его в неподвижном положении молено создавать любой сдвиг фазы эдс ротора относительно эдс статора (фигура 55), благодаря чему двигатель превращается в трансформатор фазы. Если присоединить обмотку статора или ротора к сети, а три фазы обмотки, помещенной на другой части машины, соединить последовательно с фазами первой, то получится схема потенциального регулятора (фигура 56). Первая обмотка гюг создает в машине вращающееся магнитное поле, которое индуктирует во второй обмотке добавочное напряжение Е-2, геометрически складывающееся с напряжением первой“ обмотки Ег. Т. о. можно получить максимальное напряжение Еп== Еу+Е„ и минимальное Е„. =Е1 — Е2.
птгп х
Если обмотка w2 сдвинута от оси обмотки Wy на угол а, отличный от 0 и 180°, то результирующее напряжение Еп получится как геометрическая сумма напряжений Еу и Е2:
Еп =Еу + Е.2.
Потенциальный регулятор рассчитывается на отдаваемую им кажущуюся мощность:
ТГТ л _or — ^тгп
°1 2· 10*
Так же, как в трехфазном асинхронном двигателе, в потенциальном регуляторе получается нек-рый вращающий момент, соответствующий мощности, которая передается
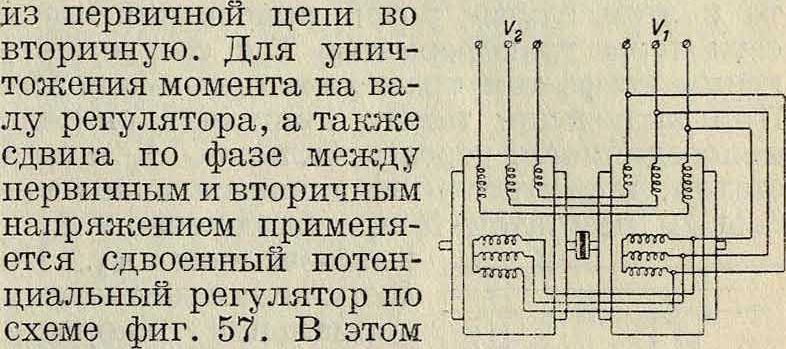
регуляторе при всех уг- Фигура 5 7.
ловых положениях ротора эдс Еу и Еп практически совпадают по фазе, а т. к. моменты обеих частей направлены навстречу, то в этом случае отсутствует общий момент на валу. Регулятор фаз применяется в лабораториях для проверки приборов при различных cos ψ и в каскадных установках для добавочного поворота фазы коллекторной машины, например в схеме Кожисека. Потенциальный регулятор применяется для регулирования напряжения у приемников в сетях с большим колебанием напряжения.
18. Асинхронная машина двойного питания. Асинхронная машина, у которой статор и ротор выполнены с одинаковым числом витков, м. б. обращена в синхронную. Для этого фазы статора и ротора соединяют в обратном порядке так, чтобы при неподвижном роторе поля статора и ротора вращались в противоположи, направлениях. Если при помощи внешн. силы довести ротор до двойной
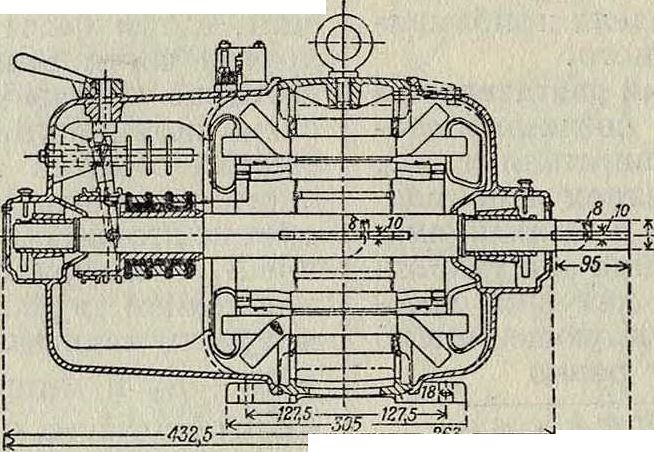
синхронной скорости и включить статор на сеть, то поле статора начнет вращаться относительно ротора в обратном направлении; поэтому, если после совпадения фаз присоединить к той же сети и ротор, то машина будет вращаться синхронно независимо от нагрузки. Намагничивающий ток будет доставляться поровну статором и ротором. При нагрузке машины как двигателя ротор несколько отстает по фазе от вращающегося поля, но будет продолжать вращаться синхронно. При генераторном режиме ротор, наоборот, несколько опередит по фазе поле. Подобно асинхронному генератору машина двойного питания получает намагничивание из сети и поэтому должна работать параллельно с синхронной машиной.
Двойное питание м. б. осуществлено и при нормальной, а не двойной, скорости вращения по схеме Толвинского. Для этого фазы статора и ротора, как было уже сказано, соединяются в обратном порядке. Сначала с сетью соединяется только статор, и двигатель доводится до синхронной скорости или близкой к ней, после чего к сети присоединяется и ротор. Т. к. в этом случае ротор вращается в направлении, обратном направлению вращения его собственного поля, то это поле будет вращаться относительно статора с таким же малым скольжением, с каким поле статора вращается относительно ротора. Если числа витков статора и ротора не равны, то в этом случае ротор присоединяется к сети через трансформатор У с соответствующим коэфф-том трансформации (фигура 58). При включении такого двигателя сначала присоединяется через рубильник Аг к сети статор, и двигатель запускается в ход пусковым реостатом В при включенном А, и выключенном Az. Но достижении двигателем нормальной скорости рубильник А3 размыкается, а рубильник А 2 немедленно замыкается, после чего двигатель переходит на режим работы асинхронного двигателя двойного питания. При работе двигателя по этой схеме в цепи его статора протекают одновременно токи основной частоты h и частоты скольжения •s/1=/2. Максимальная мощность такого двигателя, при условии незначительного сопротивления сети, возрастает почти в 2 раза, т. к. момент вращения образуется как полем статора, так и главным полем ротора, но продолжительная мощность двигателя изменяется весьма мало.
!7. Конструкция И. и. Конструкция И. м. в сильной степени определяется системой ее охлаждения и способом защиты от попадания внутрь ее посторонних тел: капель дождя, пыли и т. и.
По способу охлаждения И. м. разделяются на следующие типы. 1) Машины с естественным охлаждением, не имеющие никаких приспособлений для охлаждения. 2) Машины с самовентиляцией, охлаждение которых достигается вентилятором, составляющим одно целое с вращающейся частью. 3) Машины с посторонним охлаждением, к к-рому охлаждающая среда подается вентилятором, работающим независимо от машины.
250—*
-737,5
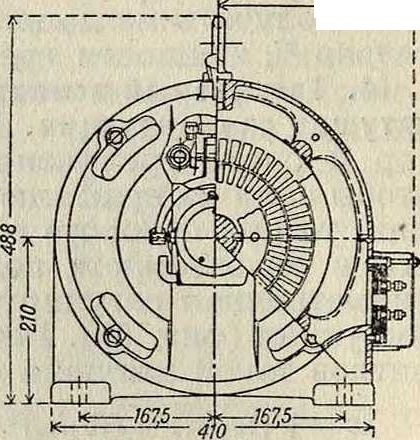
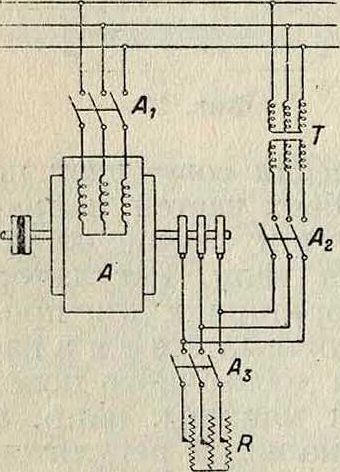
Фпг. 58.
Фигура 5 9.
По способу защиты И. м. разделяются на следующие типы. 1) Открытые машины, в которых все вращающиеся и токопроводящие части не имеют специальных защитных приспособлений. 2) Защищенные машины, которые в свою очередь разделяются на: а) защищенные машины, у которых обмотки и другие части, находящиеся под напряжением или в движении, защищены от случайного прикосновения или проникновения внутрь посторонних тел, но т. о., что свободный обмен
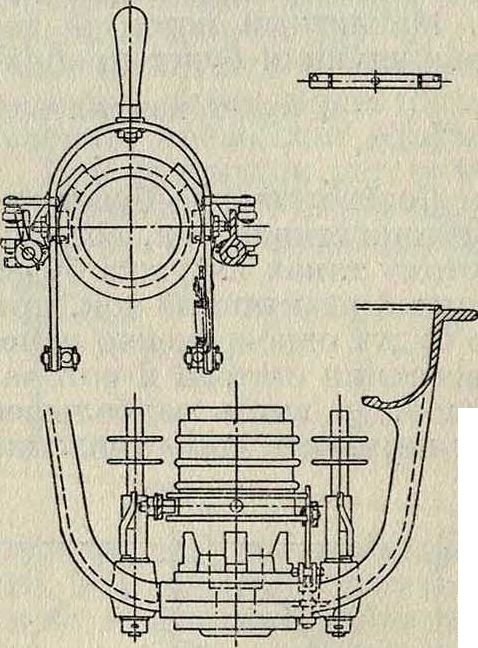
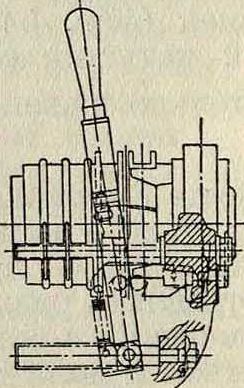
Фигура 60.
воздуха с внешней средой не нарушен (против пыли, влажности н газа эти машины не защищены);
б) защищенные от падения капель сверху (капежа); в) защищенные от дождя и брызг; имеют приспособления от проникновения водяных капель и брызг любого направления. 3) Закрытые машины, которые в свою очередь разделяются на: а) закрытые, которые, не будучи абсолютно герметическими, не имеют других отверстий, кроме отверстий для скрепляющих болтов и выводов; б) закрытые вентилируемые с независимым охлаждением, к которым воздух подводится посредством труб или каналов;
в) герметические, которые имеют плотно закры-
тый корпус, не допускающий проникновения внутрь влаги даже при погружении в воду.
4) Машины с защитой против а, которые в свою очередь разделяются на: а) машины с защитой против а, которые имеют специальный кожух достаточно прочный, чтобы
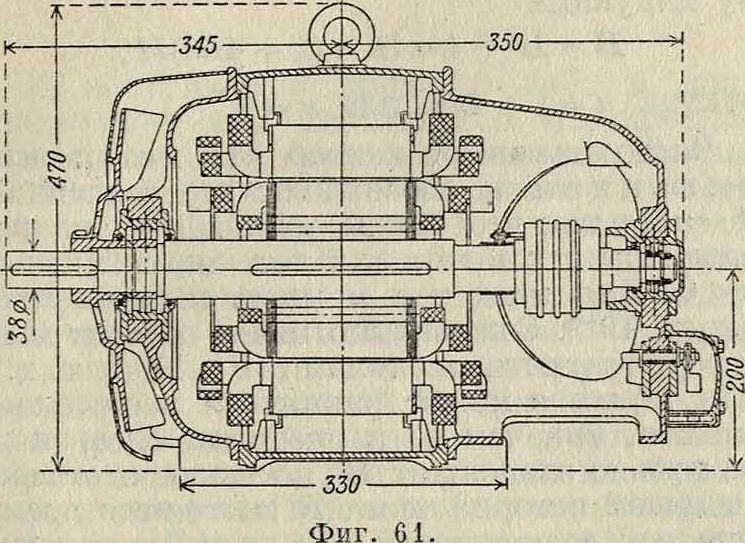
противостоять у газа внутри машины; б) машины с противоной защитной оболочкой для контактных колец.
Асинхронные двигатели в зависимости от их назначения выполняются в форме всех вышеперечисленных типов. Наиболее распространенным является открытый самовен-тилируюгцийся двигатель. На фигуре 59 представлены продольный и поперечный разрезы открытого самовентилирующегося асинхронного двигателя завода «Электросила» с контактными кольцами. В зависимости от числа полюсов, на которые выполнена обмотка, этот тип дает различную мощность: при 1 500 об/м. 10 k V, при 1 000 об/м. 6,8 kW, при 750 об/м.
4,5 kW. Двигатель имеет специальное приспособление для подъема щеток и замыкания ротора накоротко. На фигуре 60 представлен отдельно конструктивный чертеж приспособления для подъема щеток фирмы SSW, применяемого этой фирмой в маломощных двигателях. На фигуре 61 представлен продольный разрез закрытого с вентиляцией двигателя фирмы SSW в 11 kW, 1 500 об/м., с контактными кольцами без подъема щеток.
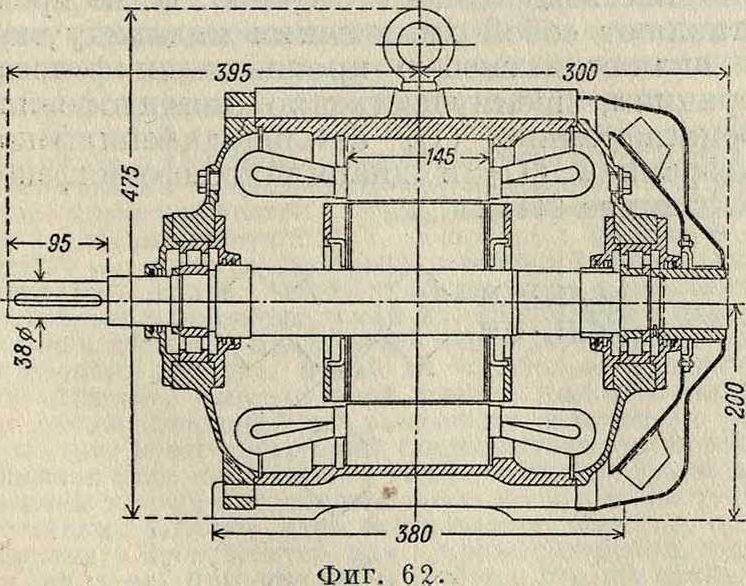
Охлаждение закрытых двигателей достигается или обдуванием внешней ребристой поверхности с помощью вентилятора, посаженного на вал с внешней стороны корпуса, или же с помощью установленного в нем небольшого воздухоохладителя, внешняя и внутренняя поверхности которого обдуваются специальными вентиляторами. На фигуре 62 представлен поперечный разрез двигателя SSW с обдуваемой оболочкой в 10 kW при 1 500 об/м. с высоким пазом для получения большого пускового момента. Внешний вид двигателя представлен на фигуре 63. Двигатели этого типа применяются для работы в газовых шахтах, так как они не имеют контактных колец, могущих быть источником искры и а при проникновении газа внутрь двигателя.
Асинхронные двигатели могут выполняться на весьма значительную мощность, особенно в прокатных установках. Наибольшие по мощности асинхронные двигатели построены в настоящее время американской фирмой GEC.
Эти двигатели обладают мощностью в 16 600 kW, 317 об/м., и предназначены для электрического привода гребных винтов военного корабля.
Асинхронные двигатели строятся в СССР в настоящее время на Харьковском электромеханическом заводе и на заводе «Электросила» в Ленинграде.
Потенциальные регуляторы. Благодаря отсутствию непрерывно вращающейся части потенциальные регуляторы обычно имеют или усиленную вентиляцию с помощью отдельного вентилятора или систему масляного охлаждения.
Лит.: К р у г К. А., Асинхронные двигатели, М.— Л., 1929; Б е н и ш к е Г., Асинхронные двигатели трехфазного тока, СПБ, 1912; Холуя нов Ф. И., Асинхронные двигатели однофазного и трехфазного тока, 2 изд., М.—Л-, 1927; Шейфер К. И., Асинхронные машины, М,—Л., 1929; Пиотровский Л. М. и Попов В. К., Испытание машин переменного тока, вып. 2—Испытание индукционных машин и преобразователей, Л., 19 27; Курбатов С. И., Сдвиг фаз р электрич. установках и средства для его уменьшения, М., 1925; Arnold R.—1 а С о и г E., Yvocn-Selstromteelmik, Β.δ,Τ. Ι, В., 1909; Sallinger F., Die asynchronen Drciistrommaschinen, B., 1928; В i er-m a η n s .T., Xlberstrome in Hochspannungsanlagen, B., 1926; Powle F., Standard Handbook for Electrical Engineers, a cd., N. Y. 1922; Heubaci .Г., Per Drehstrommotor, 2 Aufl., B. 1923; Hobart H., Electric Motors, v. 1, London, 1923; Schait H., Der Drehstrominduktionsregler, Berlin, 1927; Z a b r a n-s ky H., Die wirtschaitliche Regelungvon Drehstrom-motoren durcii Drehstrom-Gleicbstrom-Kaskaden, Berlin, 1927. M. Костенко.