 > Техника, страница 64 > Навигация
> Техника, страница 64 > Навигация
Навигация
Навигация, кораблевождение, совокупность ряда наук, позволяющих осуществить безопасное плавание корабля в море. К этим наукам относятся: 1) собственно Н.; 2) м о р е х о д и а я астрономия, методами которой происходит определение корабля в море по небесным светилам; 3) д е в и а-ция компаса (смотрите Судовой компас)·, 4) теория электронавигационных инструментов и гл. обр. электромеханич. компаса (гирокомпаса), основанного на принципе гироскопа (смотрите Волчок и Электронавигационные приборы)·, 5) л о ц и я—описательная наука, дающая сведения об условиях плавания в данном районе (течение, ветры, предостерегательные знаки, различные сигналы и прочие);
в) м о р с к а я м ете о р ол о г и я и 7) о к е-а и о граф и я, изучающие фнзико-географпч.
Т. Э. m. XIV.
л особенности моря и берегов. Н. рассматривает способы, при помощи которых возможно наилучшим образом провести корабль из одного пункта в другой.
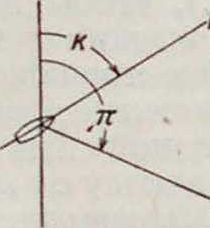
Плавание всякого корабля осуществляется при помощи компаса (магнитного или гирокомпаса) и морских карт, построенных в мер-каторской проекции (смотрите Картографические •проекции), позволяющей кривую линию пути корабля, т. н. локсодромию изображать на картах прямой. Действие компаса основано на свойстве магнитной стрелки сохранять в данном месте неизменное положение; стрелка одним концом указывает направление северного магнитного полюса, а другим—южного. Это направление, или т. н. магнитный меридиан, составляете истинным меридианом в каждой точке земной поверхности свой определенный угол (с течением времени он изменяется), называемый магнитным склоне-н и е м (1. Магнитная стрелка, помещенная вместе с компасом на корабль, вследствие искажения поля земного магнетизма в месте нахождения судна, обусловливаемого железными массами корабля, отклоняется от своего первоначального положения и определяет новое направление, т. н. компасный меридиан. Этот последний с направлением магнитного меридиана составляет угол, называемый девиацией компаса д. Этот угол, различный для каждого компаса и изменяющийся с направлением судна, определяется особыми способами; он изменяется с течением времени. Компас дает возможность ориентировать корабль (то есть его диаметральную плоскость) по странам света. Угол, составляемый диаметральною плоскостью корабля с плоскостью меридиана, называется курсом корабля. Всякое направление с корабля на какой-нибудь предмет называется пеленгом л этого предмета и определяется углом, образуемым плоскостью меридиана с вертикальною плоскостью, проходящей через корабль и данный предмет (фигура1): Zк—курс корабля; Ал—пеленгпред-мета А. Курсы и пеленги бывают: истинные, магнитные и компасные. Эти названия определяются в зависимости от меридиана— истинного, магнитного или компасного, с которым данное направление образует угол (фигура 2). ΔΝΟΚ— истинный курс (И. К.); ΔΝΜ_ΟΚ— магнитный курс(М. К.); ΔΝκβΚ— компасный курс (К. К.); ΔΝΟΑ—истинный пеленг (И. II.); ΔΝΜΟΑ—магнитный пеленг (Μ. Π.); ΔΝκ_ΟΑ·—компасный пеленг(К. П.). Йз чертежа определяем:
Истинный курс=М. К. + d (склонение) (1) М. К. — К. К. + <5 (девиация) (2) И. К. — К. К. -р δ -)- d=К. К. -f- А, (3) где Δ =. d + <5,
И. П.=М. П. + d;
И. IT.=К. П. -f- δ -(- d » К. ΤΙ. -|- Δ. (4)
Компас, помещенный на корабле, указывает всегда компасные направления, на карту же-наносятся истинные. Исправление компасного курса или пеленга в магнитный или истинный производится по одной из приведенных формул.
При плавании в море ведется счисление-пути корабля. Это счисление м. б. выполнено или графич. прокладкой или при помощи вычислений (простое, составное или сложное счисление). Сущность прокладки (графической) заключается в проложении на карте всех истинных курсов корабля и в отложении по каждому курсу пройденного расстояния за время нахождения на этих курсах. Эти расстояния на каждом курсе определяются по лагу или по числу оборотов винта. Заметив момент, когда корабль, определи» свое точное место, лег на первый курс, и зная скорость корабля, можно в любой момент определить на карте точку, в которой находится корабль, а следовательно и его широту и долготу. Ветер, действуя на наружную поверхность корабля, перемещает его в направлении своего действия, параллельно линии курса. Вследствие этого путь корабля! располагается по линии, составляющей некоторый угол с линией курса. Этот угол называется у г л о м дрейфа. Дрейф"определяется по кормовой струе. Когда ветер дует с левого борта (левый гам), дрейф принимают как поправку истинного курса, со знаком плюс, а когда ветер дует с правого борта, (правый гам), дрейф принимается со знаком минус. Путь корабля относительно воды== И. К. + дрейф. Когда известно течение“ действующее в районе плавания корабля“ то при прокладке его принимают в расчет. Снос корабля под действием течения и его· ход под действием двигателя складываются-в одну равнодействующую, и корабль перемещается не по линии Й. К.-(-дрейф, а по этой последней, представляющей истинный (действительный) путь судна на карте. При прокладке на течении действительный путь корабля получают графическим построением, для этого в одном и том же масштабе откладывается скорость корабля по курсу и скорость течения (в тех же единицах) по направлению его действия,—равнодействующая· этих двух слагаемых определит действительный путь корабля. Графич. прокладка применяется при плавании вблизи берегов, на. сравнительно небольших переходах. При плавании в океанах применяется счисление, основанное на вычислении широт (φ) и долгот (I). Счисление называется простым, когда корабль из отшедшего пункта (точка отправления судна) пришел в при-ш едший пункт (конечная точка пути) одним курсом. Для вычисления пользуются формулами:
<р» — 9ч=S cos к, (5>
a — S sink, (6>
12- lt«* «sec?,, (7)
h - h - [igtg £ + φ2ή - lgtg β + |l)]tg к. (8У
где φ1 и φ2—широты отшедшего и пришедшего пунктов, S—пройденное расстояние; к—курс корабля; a—от шествие, то есть
Фигура 1.
К Ν„4ί
d I

Фигура 2.
сумма отрезков параллелей между отшедпшм и пришедшим пунктами; <р0. Со ставное счисление применяется, когда корабль совершает плавание несколькими курсами. По ф-лам (δ) и (G) для каждого курса находят разность широт и отшествие а; затем их суммируют и получают генеральную (общую) разность широт и генеральное от-шествие. Сложив генеральную разность широт с широтою отшедшего пункта, находят широту пришедшего пункта. Для определения долготы генеральное отшествие обращают по формуле (7) в разность долгот и последнюю складывают с долготой отшедшего пункта, сумма даст долготу пришедшего пункта.
С л о ж мое с ч и с л е н и е. Т.к.ф-ла (7)— приближенная, то в больших широтах (> 05°) при переходах в 100—150 миль получается значительная ошибка в долготе. В этих случаях пользуются сложным счислением, состоящим как бы из ряда простых счислений, причем долготы промежуточных точек не определяются, а берутся только сделанные разности долгот. Сложное счисление употребляется редко, т. к. точность пришедшей долготы, определенной этим способом, мало выигрывает вследствие несовершенства компаса и лага. Место судна в море, определенное счислением, называют счислимым местом; последнее отличается от истинного положения судна, вообще говоря, тем более,чем далее вели прокладку не определяя места корабля определением астроном и чес-к и м—по небесным светилам и хронометру, или н а в и г а ц и о н н ы м—по земным объектам. Место судна, найденное при помощи j навигационного определения, называют о б- I сервованным.
Навигационное определение к о р а б л я в море. Сущность всех навигационных способов определения места корабля в море сводится к определению по береговым предметам углов, пеленгов и расстояний до них судна и в проложении их на карту. В кораблевождении употребляются следующие способы определения:
1) по двум углам; 2) по трем пеленгам; 3) по двум пеленгам; 4) по пеленгу и горизонтальному углу; 5) но двум расстояниям; G) по пеленгу и расстоянию и 7) по крюйс-пеленгу.
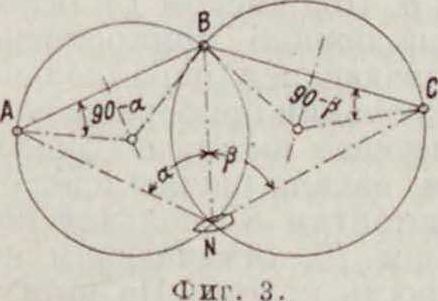
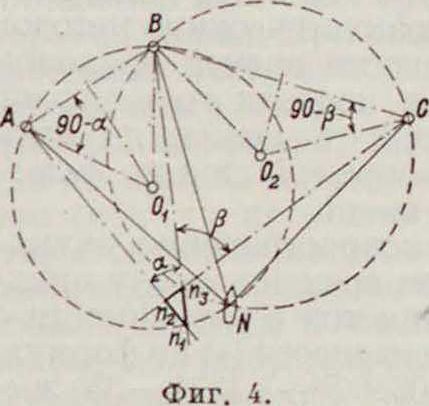
Первый способ применяют в том случае, когда в виду корабля находятся три предмета, обозначенные на морской карте (фигура 3); измеряя углы а и β между линиями ΝΑ, ΝΒ и NC (Ν—место корабля), получаем место корабля как точку пересечения окружностей ΑΒΝ и BCN; способ построения ясен из фигура 3. Для определения места корабля по второму способу пеленгуют три предмета А, 11 и С (фигура 4), определяют истинные пеленги и проводят на карте обратные (то есть отличающиеся на 180°) пеленги АпхВп, и Сп2 через означенные три точки. Обычно три пеленга не пересекаются в одной топке, а обра
зуют тр-к прцпДтр-к погрешности, или ложный тр-к); если последний очень мал и нет основания подозревать наличия значительной систематической ошибки, место корабля берут в центре этого тр-ка, в противном случае находят центры Ох и 02 вспомогательных окружностей способом, указанным на фигуре 4, и определяют истинное положение N как точку пересечения обеих окружностей. Этот способ является более точным, чем определение по двум пеленгам, когда положение корабля определяют как точку пересечения двух исправленных обратных пеленгов. Определение по пеленгу и горизонтальному углу сводится к предыдущему, т. к., находя пеленг одного предмета и угол между визирными линиями на тот же и на второй предметы, определяют, введя соответствующие поправки, пеленг и второго предмета. Когда известны расстояния корабля до двух обозначенных на карте’предметов, то место его
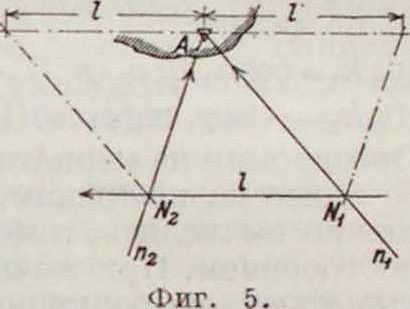
определяется как пересечение двух окружностей, проведенных из данных точек радиусами, равными этим расстояниям. Определение места по пеленгу и расстоянию от пеленгуемого (предмета производят, проводя на карте через данный предмет исправленный обратный пеленг и откладывая по нему в соответственном масштабе рассто я-ние. Сущность определения места по крюйс-пеленгу заключается в следующем. В известный момент с корабля берут пеленг пхА (фигура 5) по компасу какого-нибудь предмета на берегу и затем второй пгА через нек-рый промежуток времени. По разности моментов между пеленгами рассчитывают пройденное кораблем расстояние I и вмещают его между пеленгами, проведенными от берегового предмета параллельно линии курса ΝΧΝ2. В пересечении вмещенного отрезка с обоими пеленгами будут находиться места корабля Nt и Λ72 в момент взятия соответственного пеленга. При плавании в тумане определяются (приближенно) но воздушным сигналам:
сиренам, колоколам и сигнальным пушкам. Ориентируются также по курсам и глубинам. За последнее время широко развиваются способы определения места по звуку (смотрите) подводных колоколов и электромагнитных мембранных отправителей (осцилляторов). Для приема сигналов, отправляемых этими приборами, на кораблях устанавливаются приемные аппараты, состоящие из двух микрофонов, помещаемых в подводной части корабля с правого и левого бортов. Корпус корабля, находящийся между приемниками, отбрасывает т. наз. «звуковую тень», вследствие чего сигнал бывает слышен только в
*4
определенном секторе. Корабль, услышав подводный сигнал, поворачивается, определяет направление лучшей слышимости и в этот момент берет пеленг по компасу, к-рый и определяет направление на отиравнтель-ную станцию. Через некоторый промежуток времени берется второй пеленг, и место корабля определится по крюйс-пеленгу. Новейшие способы определения производятся при посредстве радиопеленгаторных станций (смотрите Пеленгатор). При наличии двух и трех станций, объединенных в одну общую группу, место получается сразу по двум и трем пеленгам. Когда отправительная радиостанция (например пловучие маяки) снабжена и подводным звуковым аппаратом, место определяется радиоакустическим методом, основанным на разности времен прохождения радиосигнала и подводного звукового сигнала. Расстояние х от корабля до отпра-вительной станции определяется по ф-ле: x=vt,
где V—скорость распространения звука в воде, (—промежуток времени между приходом сигналов; v меняется в зависимости от темп-ры (Т) воды и солености (s) по формуле: r=14o0+420G7’-0.0366T4-1.137(s—35) м/ск. Радиопеленг получается обычным путем.
Плавание по дуге большого круг а. При значительных океанских переходах, в особенности в больших широтах, путь корабля выгоднее располагать по дуге большого круга (ортодромии). Длина ортодромии вычисляется по ф-ле: cos D=sin ψχ sin φ., -j- cos φ1 cos <p2 cos A — A)· Начальный и конечный курсы определяются по ф-лам:
ctg A^cosip, tg<p2 ese (ϊ2 — l,)—sing?! ctg A— lx), ctg fc2= — tg^cos^csc (i2— Ii)+sin?>2ctg (I2—Ιχ). Ортодромия на меркаторской карте м. б. либо нанесена по точкам, положение которых можно вычислить, либо определена графич. построением. При вычислении промежуточных точек их берут через 5° или 10° долготы и вычисляют только широты:
tgy=A sin (Z2 — Ιχ) + в sin (I —I,), где
П.=tgφχ esc А — !,); В=- tg?>2csc А — А).
Iх—долгота отшедшего пункта; 12—пришедшего пункта и I—долготы промежуточных точек.
Лит.: Саке л лари Н., Навигации. Л., 1926; Ш е и к о в с к и и А., Навигация, СПБ, 1914; Б е с-и и т о в Μ. М., Учебник по навигации, 2 издание. II., 1919; К о р н и л о в II. А., Навигация, М., 1926; 3 ы 0 и п II. Ру повод (-run к кораблевождению, ч. 1, СПБ, 1888; Admiralty Manual of Navigation, v. 2, L. 1922; Letty, Wrinkles in Practical Navigation, 20 ed.,L., 1928; Lehrbuch d. Navigation, lirsg. v. Reichs-marineamt, Berlin, 1917; Μ ii I 1 e r J., liilfsbucli fur Sclliffsoffiz i ere. B., 1911: Muller .1., Ililfsbuch fur die Schiffsfiihrung, 2 Aufl., B., 1925; Breusing A. u. M e 1 d a u II., Steuermannskunst, 10 Aufl., Bremen, 1929; Fu 1st O., Nautisclie Tafeln, Bremen, 1929; Ilandbiicher d. Ostkiiste Afrikas, d. Westkiiste Ameri-kas u. s. w., hrsg. vonder Marineleitung, Berlin, 1930 (переиздаются ежегодно); 1) u n r a v e. n, Selt-lnstruo-tion in the Practice a. Theory of Navigation, v. 3, L., 1908; Hill J., Textbook of Navigation a. Nautical Astronomy. L., 1918; H a I 1 V., Modern Navigation, 2 cd., London. 1919; Wi lliamson A. P.W., Textbook of Navigation a. Nautical Astronomy, Glasgow, 1920; W i 1 s о n-B arker I), a. Alii n g h a m W., Navigation: Practical a. Theoretical. 1 cd. London 1923; Jefferson’s Nautical Almanac a. Tide Tables. Harbour and Lighthouse Guide, Loudon (переиздается ежегодно). п. Матвеев.