 > Техника, страница 76 > Обычно
> Техника, страница 76 > Обычно
Обычно
Обычно изготовляется отливкой, реже—
посредством автогенной или электродуговой сварки. При проектировании Р. прежде всего в соответствии с существующими моделями вы-
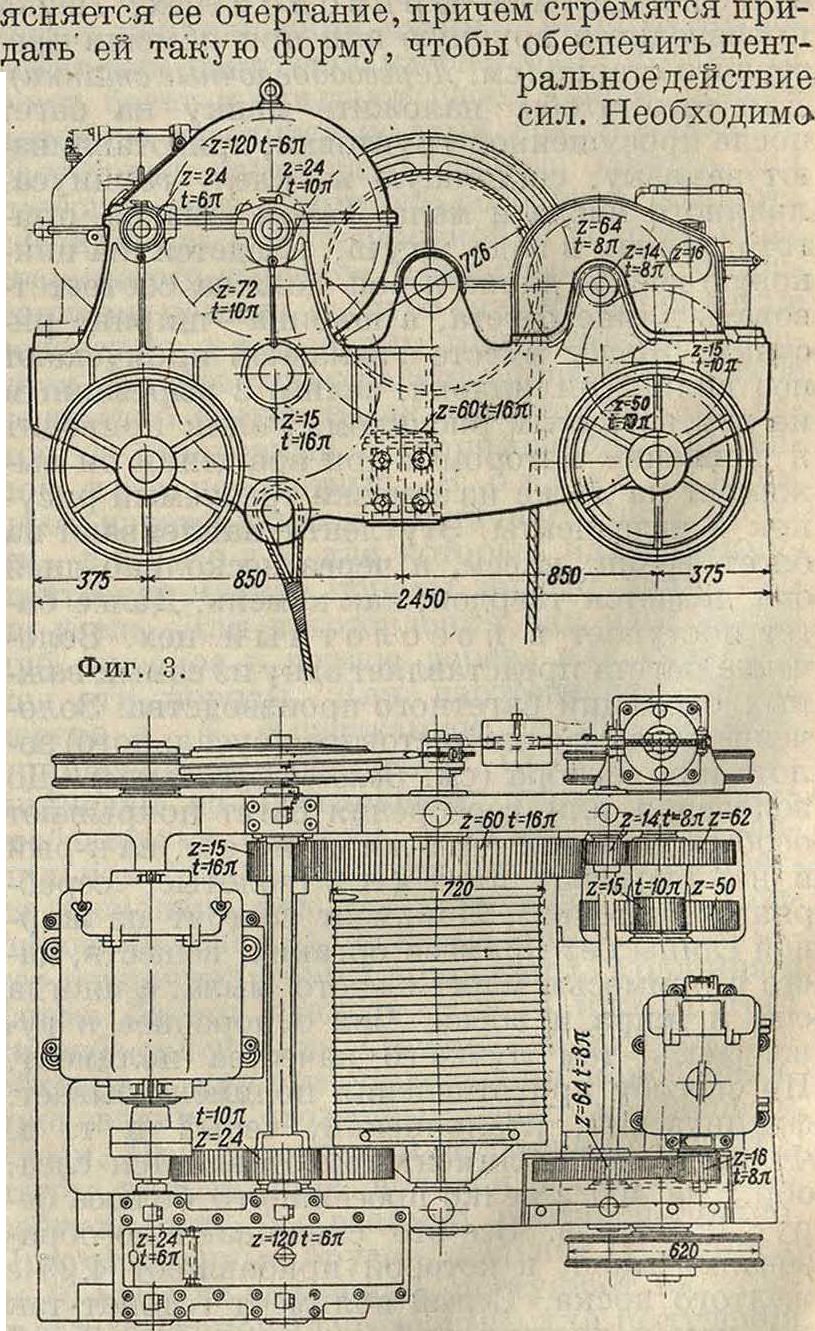
руководствоваться общими соображениями & преимуществах деформации растяжения и сжатия перед изгибом и кручением; для достижения этого ось машины должна совпа-
дать с плоскостями симметрии Р. и по возможности быть их общей линией пересечения. Эксцентричное расположение сил ведет кнеоб-
ших машинах часто является причиной поломки и быстрого износа опорных частей. Гораздо выгоднее равномерно распределять массы металла в Р., чем концентрировать их вблизи ее основания, т. к. равномерное распределение уменьшает расстояние между ц. т. пло-
мы, должен быть по возможности вполне уравновешены; в этом случае фундаментные болты играют роль лишь добавочных соединений и не должны вызывать в Р. дополнительных напряжений; единственной связью рамы и фундамента должен быть вертикальная реакция веса машины. Если Р. или станина при снятых фундаментных болтах на полном ходу машины не подпрыгивает, не поворачивается и не смещается, то последняя должен быть признана хорошо уравновешенной. Однако и в этом случае Р. будет устойчивой не всегда, а именно только тогда, когда деформация ее частей или других деталей машины не превышает определенных значений. Возможные упругие колебания Р. вызовут и будут поддерживать инерционные силы и моменты их; при больших амплитудах колебаний они понижают степень устойчивости машины и даже могут сделать ее неустойчивой. Только абсолютно жесткая Р. при вполне уравновешенной машине могла бы обладать неограниченной устойчивостью при всех условиях работы. Условия внешней устойчивости рамы в общем случае м. б. представлены 6 ур-иями равновесия твердого тела. При совмещении ц. т. рамы с осью машины (линия действия ее сил) все действующие силы оказываются в параллельных плоскостях. Если инерционные силы и моменты уравновешены в каждой плоскости, будет достигнута устойчивость Р. около и вдоль двухюсей; равновесие моментов и сил
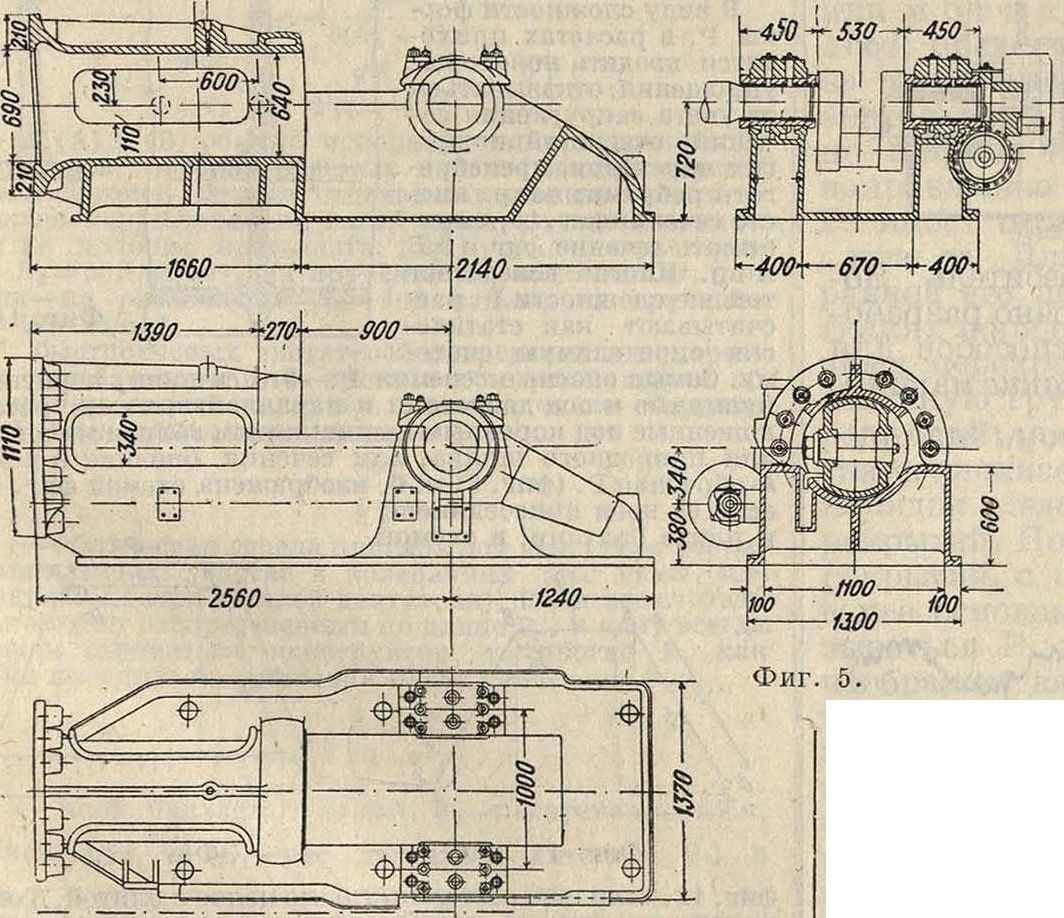
щади сечения Р. и осью машины, а вместе с тем и плечо действующих сил. Байонетная Р. например совсем не применяется в двигателях большой мощности. Силы, действующие на ра относительно третьей оси возможно лишь при условии равен- Фиг 6
ства. нулю главного вектора и главного момента всех сил. В Р. однорядных вертикальных машин расположение осей всех цилиндров в плоскости, заключающей ц. т. рамы, обеспечивает статическое равновесие относительно продольной горизонтальной оси; уравновешивание инер-
ционных сил и моментов в этой плоскости и в динамич. равновесие переходит во внешнее плоскостях, перпендикулярных к этой оси, неравновесие. Поэтому расчет Р. должен быть создает полное равновесие относительно вер- сделан при том непременном условии, чтобы
тикальной оси и второй горизонтальной. В современном устройстве машин уравновешивание является одной из главнейших целей конструктора и одним из важнейших требо
ваний, которые предъявляет потребитель. Вопрос об уравновешивании достаточно разработан в технике, и имеется ряд способов для его разрешения (смотрите Уравновешивание машин).
“Хл/Х
Фигура 9.
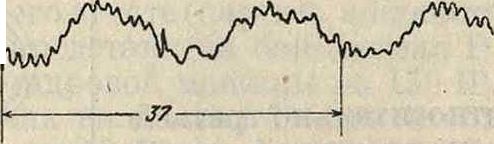
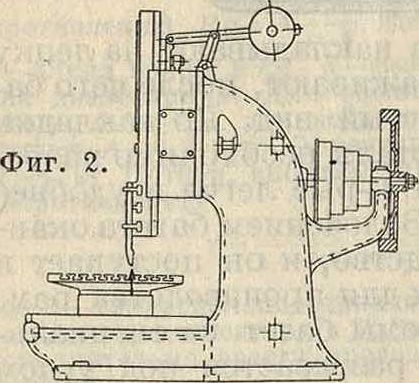
Тем не менее вследствие деформаций происходят колебания Р. в состоянии полного, казалось бы, равновесия. На диаграмме фигура 9 показаны колебания Р. ткацкого станка, к-рый даже иногда не прикрепляется к фундаменту и предполагается как бы вполне уравновешенным. Из диаграммы легко усмотреть, что колебания Р. значительны, амплитуды перио дически нарастают и убывают; внутреннее деформации Р. были малы, и следовательно необходимо при расчете выбирать малые допустимые напряжения.
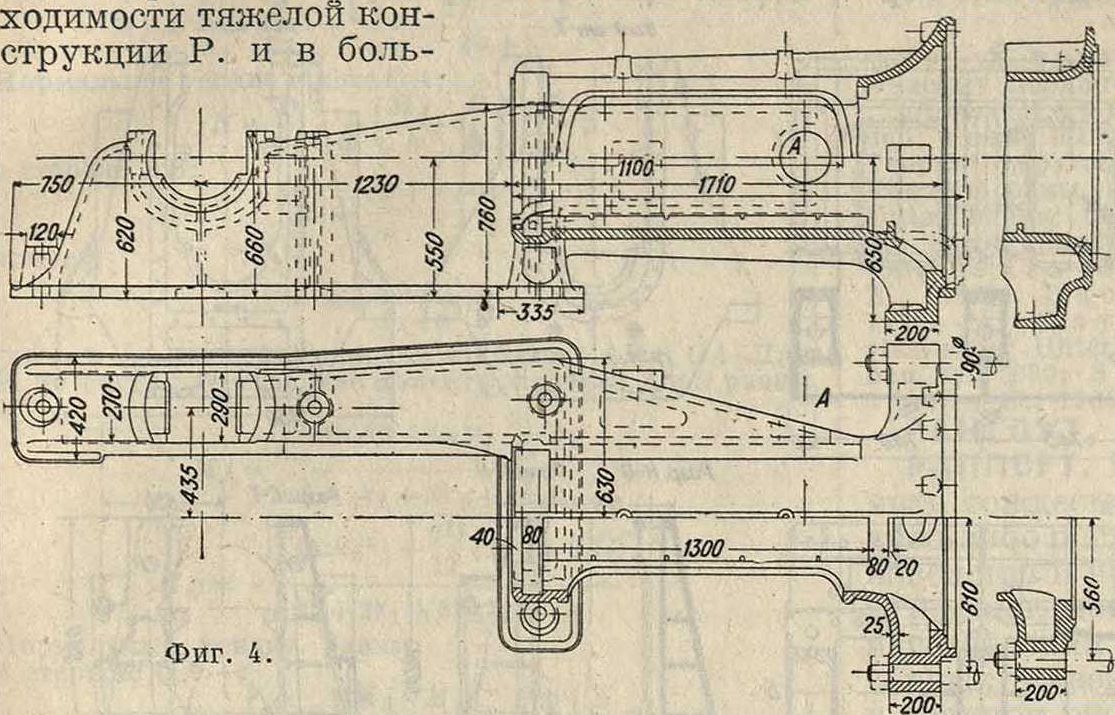
Байонетная Р. (фигура 4) представляет единственное явление из области Р., где напряженное состояние м. б. определено из условий статики. Все другие Р. представляют статически неопределимые системы идолжен быть рассчитаны по способам, которые к ним относятся.
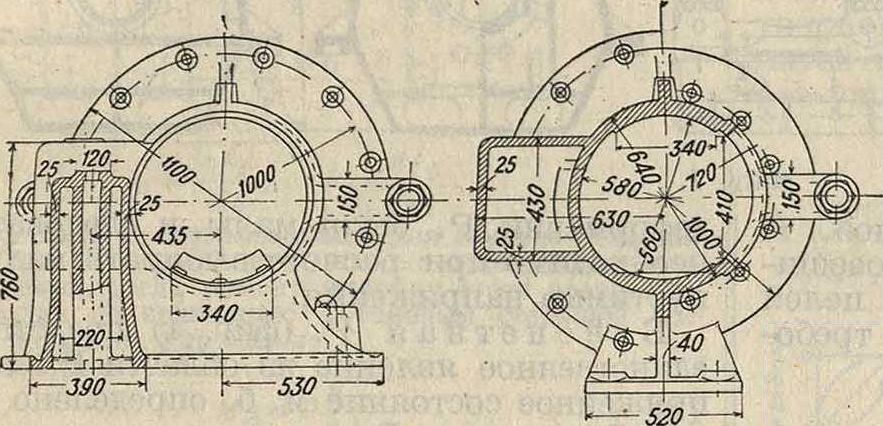
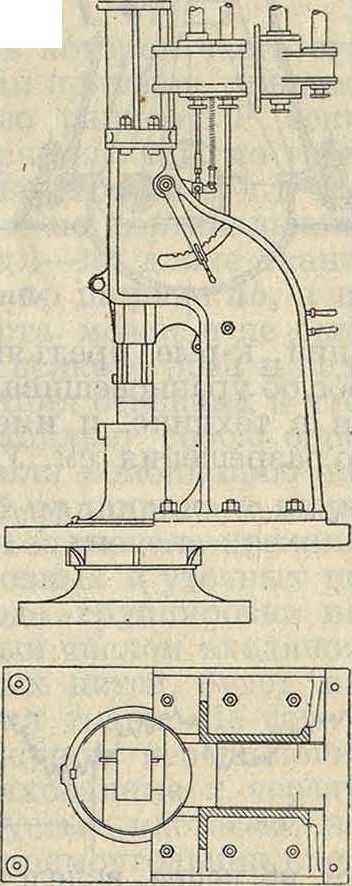
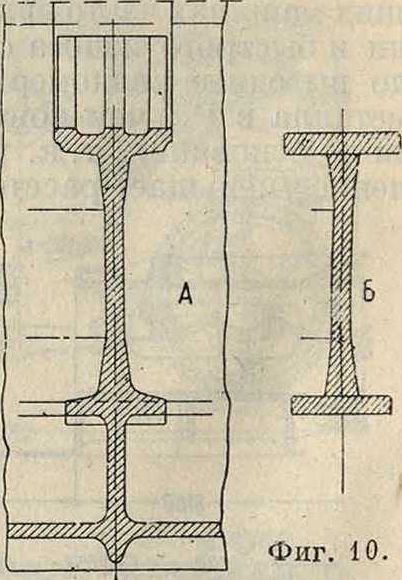
В виду сложности формы Р. в расчетах приходится вводить некоторые упрощения: отказываться от учета закругления сечений, отверстий и других переходов, пренебрегать ребрами; например вместо сеченияфигура 1Ο,Απριι-нимать сечение фигура 10,Б и прочие Иногда вследствие той же сложности Р. рассчитывают как статически определимую систему. Самые опасные сечения Р.—это сечения, перпендикулярные к оси двигателя и параллельные ему, расположенные под коренным подшипником вблизи маховика или приводного шкива, или сечения, близкие к нему. А-образная Р. (фигура 8) м. б. изображена схемой фигура 11, если ее ноги присоединены к плите болтами,
Р
и схемой
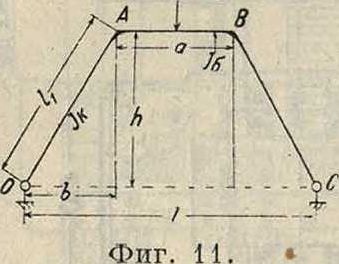
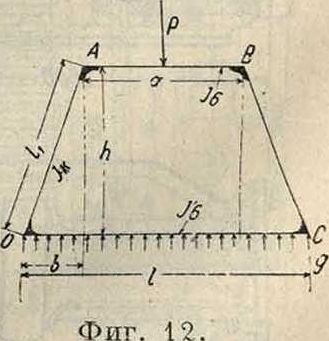
фигура 12, если она составляет одно целое с плитой.Тогда для схемы фигура 11 изгибающий момент, возникающий под действием сосредоточенной нагрузки Р, приложенной в середине верхнего горизонтального звена Р., равен в точке А: _,. „
„, =[(‘+!
M [=—— - —--
Λ О On
2k + 3
Р1 -
МР=—— —
| [R) | 4- ь* | + 2 abit „ 30 -, д | Г Е12.Л* 1 4 -Jill |
| J | ----- π V γΡ01 | i* 4 J |
Нормальное усилие в ноге О А:
ЛТ Р h Г
"“*τϊ+ι
в стороне АВ:
1 /t 2 h
(MA_JP b Ь { h 2 h) ll’
причем
16-h Ik- o.
где I(, и Ii—моменты инерции стержней AB и О А. Для Р. по фигура 12 изгибающие моменты в точках А и О равны
МА =
М о =
дРаМЗ + fe!)--^ k i -f· 2hi -f· Зк2 “H 2li2k ι 3 Pak2ki - (2 /ij + 3 /t2)
8
hj 4“ + 3/i2 + 2fta & i
Нормальные усилия равны: в стержне ОА
-Г
в стержне А Б
причем
h Шя-Mq р Ь-| ь
!i L h + 2 hj ij ’
Мл- Mq
N ι =
ρ г>
2 il ’
=
ai*
А. -”1А
ик’ k‘-W
Эти же ф-лы м. б. использованы для стульев. Обычно звено АВ в Р. выполняется заодно с цилиндром или его рубашкой; тогда момент инерции этого звена очевидно велик по сравнению с таковым стержней ОА и ОС, и ф-лы м. б. упрощены: для первой рамы
МЛ=РЬ
М0=Р
для второй рамы лт Р h
Ν=2Τ
(А)
(В)
МА=-
N.
Мо=Р h Г
= 2 г,+ L
12 (^1 + 2) ql 2
йМ + 2) ’
qi2 J
4/г (/г, +2) ‘ 2
Ур-ия (А) и (В) Обычно используются при расчете Р. двигателей, рассматриваемых как статически определимая система. Следует отдельно проверить результирующее напряжение на изгиб и на кручение, причем они не должны превышать: для чугуна—на растяжение Бг=260 килограмм/см2, на кручение RS=120 килограмм/см“; для стали—на растяжение Вг=600 килограмм/см2, на кручение Б$=400 килограмм/см2.
Р. быстроходных двигателей подвергаются поперечным колебаниям и должен быть прочными и устойчивыми по отношению к этой нагрузке. Критич. число оборотов для Р. может быть определено по формуле 800
71 =- »
Vf
где /—статическая стрела прогиба под действием весов, принимающих участие в колебаниях (вес рамы, цилиндра и прочих деталей двигателя). Если вес считать равномерно распределенным по длине Р., к чему всегда должен стремиться конструктор, то прогиб Р. как балки на упругом основании будет найден по ф-ле
al
/=«»
k
где h—коэф. балласта в кз/c.u2, q0—иагрузкавкг 1п.см, причем <Zo= --- (Gi—вес двигателя вместе с Р.) и
4 /--£—
а~У ΪΕΐ2 ’ где Ч—обшнй момент инерции поперечного сечения Р. Значепие k можно принять для кирпичной кладки равным 240 килограмм/см2. Для Р., опертой по концам, прогиб м. б. принят равным
/= 5 Л--
’ 384 Ει20 *
1-е2
ί—всюду полная длина.
Лит.: Кернер К., Конструирование дизелей, пер. с нем., вып. t, Л., 1928; Тимошенко С. П., Теория упругости, ч. 2, СПБ, 1916; Гелер В. Жесткие рамы, пер. с нем., М., 1927; G ϋ 1 d n e г, Untersuchung iiber den Einfluss d. Betriebswarme auf die Steuerungseingriffe d. Yerbrennungsmaschinen, B., 1924; Sass F., Kompressorlose Dieselmaschinen, B., 1929; Bacli C., Mascbinenelemente, Leipzig.
1922—24; Hay as hi K., Theorie des Tragers auf elastischer Unterlage u. ihre Anwendung auf den Tief-bau, B., 1930; S t о d о 1 a A., Gas- u. Dampfturbinen, 6 Aufl., B. 1924. С. Лебедев.