 > Техника, страница 69 > Параллелограм уатта
> Техника, страница 69 > Параллелограм уатта
Параллелограм уатта
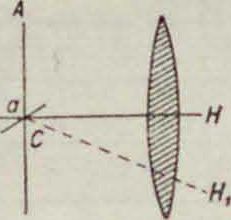
Параллелограм уатта, п р иближен-н ы ft направляющ и и м еханиз м, т.е. шарнирный механизм,одна или несколько точек которого движутся по траекториям, б. или м. близко подходящим к прямой линии. П. У. применяется для обеспечения прямолинейно-возвратного движения системы во всех тех случаях, когда устройство поступательной пары (ползуна и направляющих) является нежелательным. Предположим, что звено ΟΑχ=τ (фигура 1) совершает около точки О качательное движение, отклоняясь на угол а от своего среднего положения ОAlt и достигает при этом крайних положений ОА3 и 0А3. Соединив прямою точки Аг и А3, проведем через середину d отрезка Ахе прямую сс×О А χ; прямая сс разделит звено ΑχΒχ на части ΑχΟχ=α и
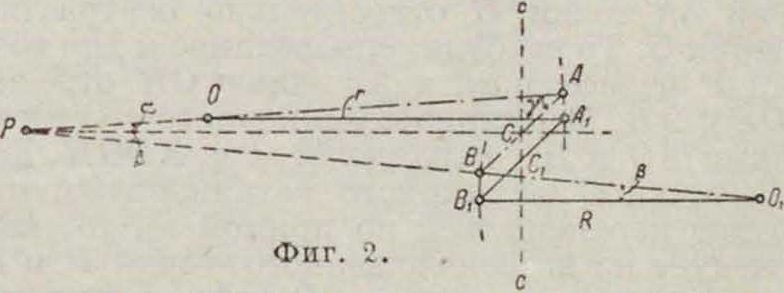
Фигура 8.
СхВ^Ь. Пусть при крайних положениях звена О Αχ точка Οχ звена ΑχΒχ совпадает с определенными двумя точками на прямой сс. Засекаем из точек А3 и А3 радиусом, равным ΑχΟχ= а на прямой сс эти две точки С2 и С3. Проводим прямые А3С3 и А3С3 и на их продолжениях откладываем отрезки А3Вг и А3В3, равные длине звена ΑχΒх. По трем точкам Blt В3, В3 определяем центр Οχ дуги окружности Ы>, по которой должна перемещаться точка Βχ звена ΑχΒχ, и тем самым определяем длину звена ΟχΒχ·=Ιί. При вращении звеньев ОАг и ΟχΒχ около центров О и Οχ точка Οχ звена ΑχΒχ будет при достаточно малом угле а и достаточно большой длине звена О А 2 описывать траекторию, приближающуюся с достаточной для
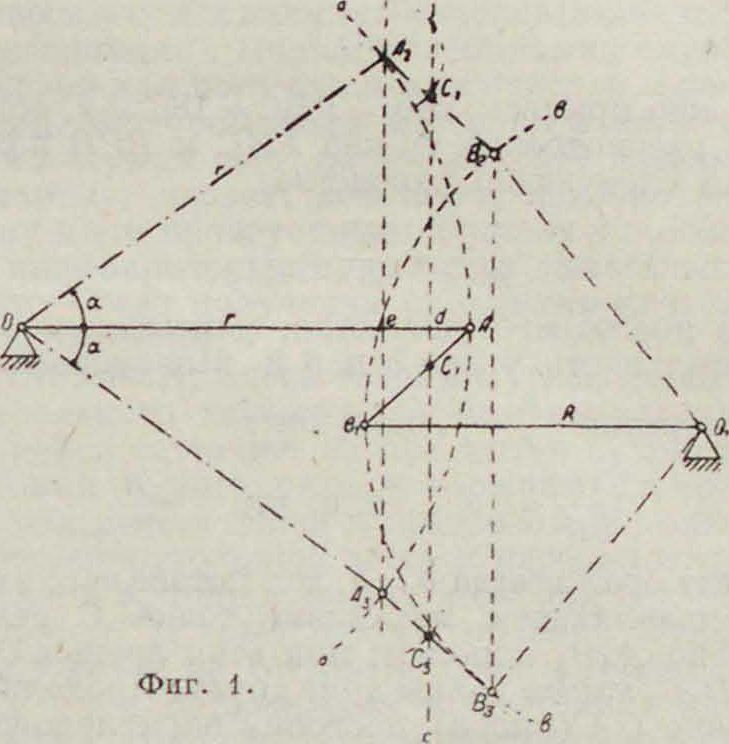
технич. целей точностью к прямой сс. Можно доказать, что в данном на фигуре 1 четырехзвенном шарнирном механизме О А χΒχΟχ имеет место следующее соотношение: а : Ь=R : г.
Действительно, при параллельном положении звеньев г и Н (фигура 2) мгновенный полюс вращения для звена ΑχΒχ будет удален в бесконечность, поэтому за бесконечно малый промежуток времени dt звено ΑχΒχ переместится в положение АВ, все точки звена ΑχΒχ переместятся параллельно направлению сс перпендикулярно к ΟΑχ, и
можно принять, что ΑχΑ#ΒχΒ, откуда следует, что Κβ=га. В следующий момент времени, когда звено ΑχΒχ заняло положение АВ, мгновенный полюс вращения для этого звена будет находиться в точке Р на пересечении оси звена О А с осью звена ΟχΒ, причем уже только точка С, которая лежит на пересечении звена АВ с лучом СР, перпендикулярным к направлению сс, опять будет иметь направление скорости, совпадающее с направлением сс, следовательно точка С и будет искомой точкой, совершающей движение по направлению, совпадающему с прямой сс. При малом угле а
можно принять, что АРВС=180°— у, тогда из рассмотрения тр-ков РАС и РСВ получим следующие равенства:
рс _ ас св
sin - — sin и sin β
Из последнего равенства, учитывая незначительность углов а и β и вышеуказанное д а отношение т — β > получим:
Другие типы направляющих механизмов см. Шарнирные направляющие механизмы.
Лит.: Me риалов Н. И., Кинематика механизмов, М., 1 923. Б. Шпрннк,