 > Техника, страница 75 > Радиокомпас
> Техника, страница 75 > Радиокомпас
Радиокомпас
Радиокомпас, радиоустройство, состоящее из приемной рамки [(смотрите) или замкну
той контурной антенны (смотрите Замкнутая антенна), приемника с усилителем и буссоли пеленгатора (смотрите). Цель его—ориентировка
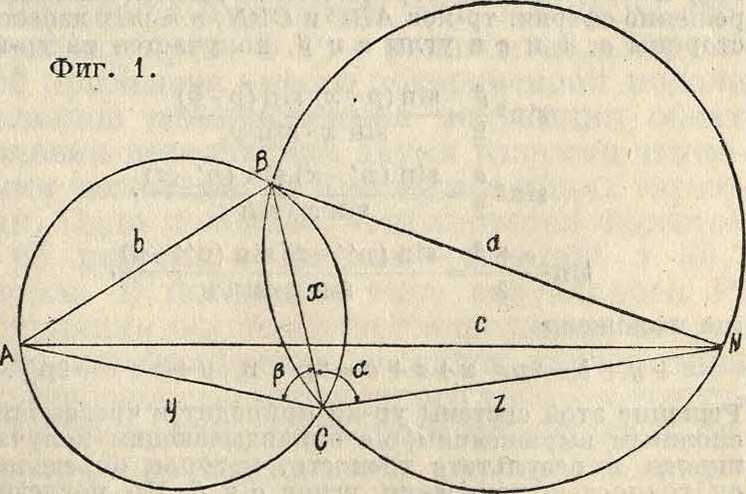
на местности по странам света. Употребляется на морских судах, в путешествиях, на аэропланах и в геодезич. работах (в последних для ориентировочных определений). П о идее и устройству это обычный передвижной пеленгатор, но задачи его несколько иные. В то время как пеленгатор (обычно стационарн. радиостанция, точно ориентированная относительно меридиана места) определяет направление на разные неизвестные сигнализирующие радиостанции по отношению к своему точно известному меридиану для нахождения их местоположения, Р. определяет направление сигналов, приходящих от точно известных радиостанций (например радиомаяков, радиостанций, передающих сигналы времени мощных радиовещательн. станций, радиостанций, дающих стандартные частоты) по отношению к своему меридиану, определяемому буссолью или астрономическим путем. Из каждых двух таких определений находится обратной засечкой (смотрите) собственное положение (фигура 1) на местности (на море). Общий вид установки Р. на корабле см. на фигуре 2.
Пусть А ж В обозначают положение известных радиостанций, С—положение Р., N—сев.полюс.Тогда АВ=Ь, Фигура 2. BN=a и AN=c будут дуги больших кругов, длина которых в метрах и градусах точно известна: 2. АСВ=β и /_ BCN=а—углы, отмеченные Р. Если построить на хордах АВ и ΒΝ дуги, вмещающие углы β и а, то они пересекутся в точке С. В отношении теории Р. тождествен с пеленгатором (смотрите Готюметр, Рамка, Замкнутая антенна). Вычисление положения Р. из данных наблюдения делается на основании ф-л и правил, излагаемых в курсах сферич.тригонометрии, морской лоции, сферич. астрономии и геодезии. Удовлетворительное решение можно получить и графич. путем, пользуясь стереографической сеткой. Аналитич. решение сферич. тр-ков АВС и CBN, в которых известны стороны а, Ь и с и углы а ж β, получается из ур-ий:
sln2i = sin(p - ж) sin(p-a);
2 sin ж sin у
Sin2 _ = sin (р-ж) sin(p-z)>
2 sin ж-sin z
„ln,a + g ит(р"-z)s n(p’-y)
2 sin z · sin у где положено-
х+У+Ь= 2р, x + z + a=2p и y + z + c=2p".
Решение этой системы ур-ий приводит к чрезвычайно сложным выражениям, не оправдывающим получающуюся в результате точность, которая определяется точностью измерения углов а и β. Но последняя в самых лучших случаях не превосходит 1°, как и для других пеленгаторов, и потому гораздо предпочтительнее искать решение графически (смотрите Стерео- I графические проекции).
По конструкции Р. чаще всего представляет систему длинноволнового пеленгатора с вращающейся экранированной рамкой. На фигуре 2 изображен Р., установленный на корабле. Рамка Р. А вынесена наружу; вращение ее производится из кабины "радиотелеграфиста посредством штурвала В;приемник Р. также находится в кабине, соединяется с рамкой проводами, проходящими внутри полой трубки С. Сравнивая Р. с другими радиопеленгаторами, следует отметить, что при пеленгировании с помощью их на судах, аэропланах и местности приходится учитывать кроме общих ошибок еще и ошибки, обусловливаемые девиацией буссоли (смотрите Судовой компас), магнитными аномалиями (смотрите), влиянием на направление вектора поля корпуса судна, аэроплана, профиля местности. Часто эти причины, особенно магнитные аномалии в неисследованной в этом отношении местности, вносят столь серьезные погрешности, что сводят к нулю значение радиопеленгирования; поэтому при всяком пользовании Р. нужна особо тщательная поверка всех возможных погрешностей. Поэтому при всякой установке Р. на корабле, аэроплане и т. д. обязательна градуировка Р.
Лит.: Баженов В. И., Основы теории радиоприема, М., 1930.—См. также Гониометр, Пеленгатор, Радиомаяк, Рамка. Н. Гаряев.