 > Техника, страница 75 > Радиомаяк
> Техника, страница 75 > Радиомаяк
Радиомаяк
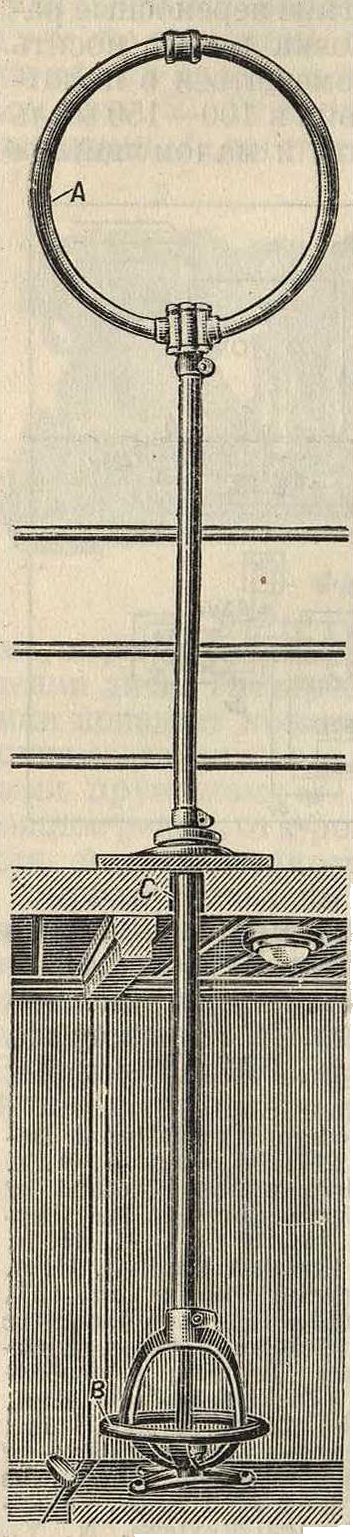
Радиомаяк, передающая радиостанция, предназначенная или для указания курса самолету или судну при условиях плохой видимости земли или для определения последними своего местоположения. По принципу действия Р. разделяются на маяки с вращающейся диаграммой излучения и на маяки с равносигнальной зоной. Р. с вращающейся диаграммой излучения наиболее разработаны в Англии. Английский Р. представляет собою радиопередатчик, антенной которого является большая вертикальная рамка, вращающаяся с постоянной скоростью (1 об/м.) около вертикальной оси. Кривая излучения рамки в плоскости, перпендикулярной к плоскости рамки, имеет форму восьмерки (смотрите Замкнутая антенна). При вращении рамки вращается и диаграмма излучения. Когда плоскость рамки перпендикулярна к географии, меридиану, подается особый сигнал, указывающий на то,что минимальное излучение направлено на С. Наблюдатель на судне или самолете отмечает этот момент на часах. Т. к. антенна вращается, то интенсивность принимаемых наблюдателем нормальных сигналов меняется и неизбежно пройдет через минимум. В этот момент плоскость передающей антенны расположена под прямым углом к прямой, соединяющей передающую и приемную радиостанции. Отметив этот момент на часах, наблюдатель легко ориентирует себя относительно Р. В продаже имеются часы со специальной градуировкой в градусах. Такого типа маяк имеется в Orford-ness’e, им пользуются морские суда. Два Р. дают возможность определить точное местоположение судна или самолета. Преимущество такогоР.—возможность одновременного использования его судами, идущими в различных направлениях; недостаток (особенно при применении в авиации): 1) продолжительность отсчета (минимум 1/2 мин.) и 2) необходимость определения момента минимума силы
сигнала, что трудно осуществить при наличии посторонних шумов. Дальность действия Р. как такового—днем около 400 км, ночью около 160 км; ошибка, получаемая при этом, не больше 2—4°. Длина волны порядка 1 000 метров К этому же типу Р. (с вращающейся диаграммой излучения) можно отнести Р. типа «Те-лефункен», предложенный в 1912 г., и первые америк. маяки. Принцип действия радиомаяка «Телефуыкен» заключается в том, что радиопередатчик переключается с одной открытой антенны, обладающей направленным излучением, на другую, сдвинутую относительно предыдущей на 10°. При работе передатчика на ту или другую антенну подается тот или другой сигнал, что дает возможность наблюдателю на судне или самолете определить свое положение относительно Р. В первоначальных работах с Р. Бюро стандартов США выбрало систему «Телефун-кен», применив к ней радиогониометр Бел-лини-Този (патент 1907 г.) в виде системы из двух антенн, расположенных под углом в 90° друг к другу и связанных с передатчиком при помощи гониометра (смотрите). Каждая из двух вторичных катушек гониометра была включена в одну из антенн, а первичная катушка была приключена к передатчику. Первичная катушка равномерно вращалась, и через каждые 10° подавался другой сигнал.
В дальнейших своих работах Бюро отказалось от сист. «Телефункен», как не дающей возможности непрерывного наблюдения за курсом и не отличающейся большой точностью, и перешло к системе Р. с равносигнальной зоной.
Сущность сист. радиомаяка с равносигнальной зоной (Г. П. Шеллера, 1907 г.) заключается в следующем. Две антенны, обладающие направленным действием и расположенные под уг-
_ _ _ лом друг к другу, при-
_". ключаются к передатчику попеременно, причем при приключении одной Фигура 1. антенны передается бук ва а (—), а при приключении другой антенны буква п (—). В направлениях биссектрис углов между антеннами, где диаграммы излучения пересекаются, получаются т. н. равносигнальные зоны. В равносигнальной зоне вследствие равенства интенсивности сигналов а и н и того, что они являются сигналами, взаимно перекрывающимися (фигура 1), получается сплошное тире. Используя равносигнальную зону Р. как указатель курса, можно получить большую точность следования по заданному курсу и кроме того непрерывное наблюдение за всеми уклонениями судна или самолета от курса, т. к. они сопровождаются появлением на фоне сплошного тире буквы и или а. Патент Шеллера был использован в Германии во время войны 1914— 1918 гг. t1]. В качестве антенны были применены две Г - образные антенны под углом в 6 0°.Болыиой интерес к этому Р. проявила?·Америка. С 1923 года Бюро стандартов США совмест-
Фиг. но с другими орга-
1 низациями непре-
рывно ведут рабо-
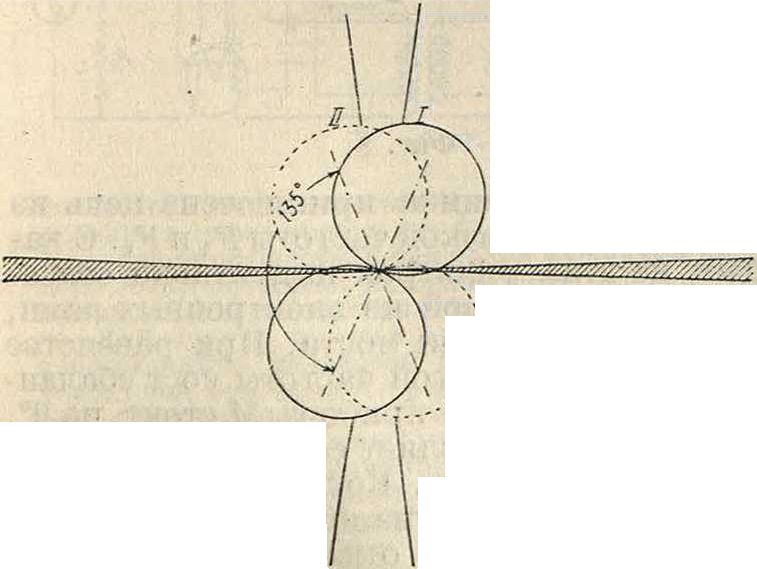
1 ‘ ты по усовершен ствованию Р. с равносигнальной зоной. В первых Р. этого типа американцы применяли попеременное приключение искрового передатчика то к одной то к другой большой рамке, расположенным под углом в 135°. Сигналы были не перекрывающиеся: а (·—) и т (—),
т. ч. в равносигнальной зоне были одинаково громко слышны обе буквы, а при отклонении в ту или другую сторону получалось преобладание в слышимости одной буквы над другой. Диаграммы излучения обеих рамок даны на фигуре 2 (используемая равносигнальная зона заштрихована). Угол в 135° был выбран, как дающий наименьшую ширину зоны. Теоретически ширина равносигнальной зоны, то есть угол, в котором интенсивность обоих сигналов одинакова, равна 0°, но в виду того, что человеческое ухо начинает различать разницу в силе сигналов только тогда, когда эта разница достигает нескольких процентов, ширина зоны составляет 1—4° при угле между антеннами в 135°. При угле между антеннами в 135° используются только два курса, сдвинутые относительно друг друга на 180° и совпадающие с биссектрисой угла в 135°. Две других зоны слишком широки.
После ряда лет работы был разработан образец Р. с равносигнальной зоной, к к-рому была изготовлена серия Р., обслуживающих в настоящее время главные воздушные линии США. В этом усовершенствованном Р. вместо рамок применены две большие замкнутые антенны, расположенные друг к другу под прямым углом и связанные с передатчиком при помощи гониометра.
Гониометр содержит две неподвижные, закрепленные под прямым углом друг к другу катушки и две под-. ^ " вижные, тоже сдвинутые У относительно друг друга > на90°. Каждая из вторич-
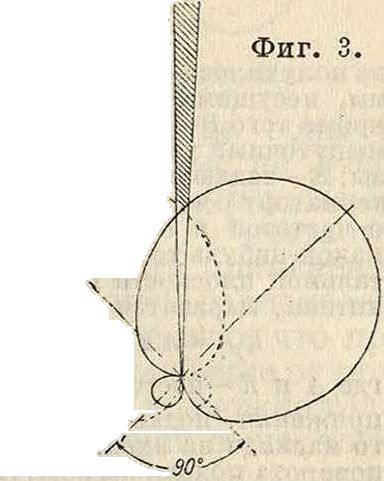
ных катушек включена в одну из замкнутых ан- тенн, а каждая первичная катушка приключена к одной из половин послед- него пуш-пульного каскада лампового передатчика. Автоматически вращающийся коммутатор подает на одну половину передатчика сигнал а (—), а на другую—сигнал н (—). При этом получается попеременное возбуждение обеих половин передатчика. Угол между первичными катушками может быть и не равен 90°. Диаграмма излучения получается такая же, как и без гониометра (фигура 2). Гониометр только дает возможность менять направление курса, так как вращение подвижных катушек гониометра равносильно вращению антенн. В том случае, если вращаются первичные катушки, диаграммы направленности вращаются в сторону вращения катушек, в случае же вращения вторичных катушек диаграммы направленности вращаются в сторону, обратную вращению катушек. Из механических соображений применяется вращение вторичных катушек. Углы между зонами можно изменить, создавая неодинаковое излучение обеих половин или изменяя форму диаграммы направленности добавлением к излучению замкнутых антенн излучения открытой антенны, получая так называемое кардиоид ное (смотрите Кардиоидпие схемы) и з-лучение (фигура 3).
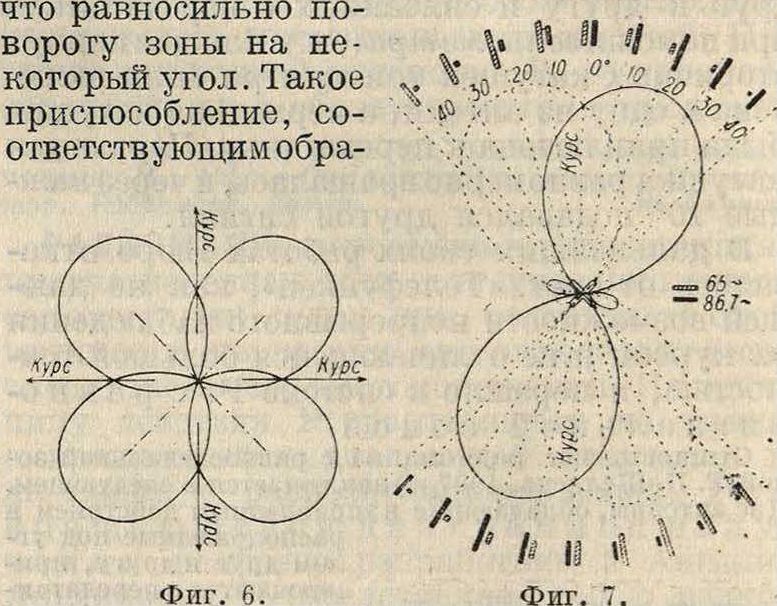
Описанные Р. носят общее название слуховых Р., так как их сигналы принимаются наслух. Слуховой метод сигналов является: 1) утомительным, 2) требует слишком много внимания от пилота и 3) достаточно субъективным. Поэтому давно ведутся работы по разработке т. н. визуальных Р., то есть Р. с визуальным, или зрительным, индикатором сигналов. Бюро стандартов в США пошло в решении этой задачи по следующему пути. В Р. с равносигнальной зоной применена вместо попеременной подачи сигналов одновременная модуляция обеих половин передатчика двумя разными звуковыми частотами, не имеющими общих гармоник. Одна половина модулируется частотой в 65 пер/ск., а другая — частотой в 86,7 пер/ск. В последнем типе визуального Р. модуляция осуществляется питанием анодов ламп предпоследних каскадов передатчика альтернаторами переменного тока соответствующих частот, сидящими на общем валу. Число оборотов двигателя автоматически регулируется с точностью до 0,1%.
Принципиальная схема дана на фигуре 4. В этом Р. гониометр А разделен на две части для уменьшения вредных связей между катушками, несущими токи
с разной модуляцией. Этот гониометр состоит из двух комплектов вращающихся катушек а и Ь, каждый из которых находится в поле одной из неподвижных катушек аг и Ьг. Обе половины гониометра помещены одна над другой, и все вращающиеся катушки сидят на одной оси. Угол между неподвижными и подвижными катушками 90°. Как гониометр, так и все части схемы тщательно экранируются для того, чтобы
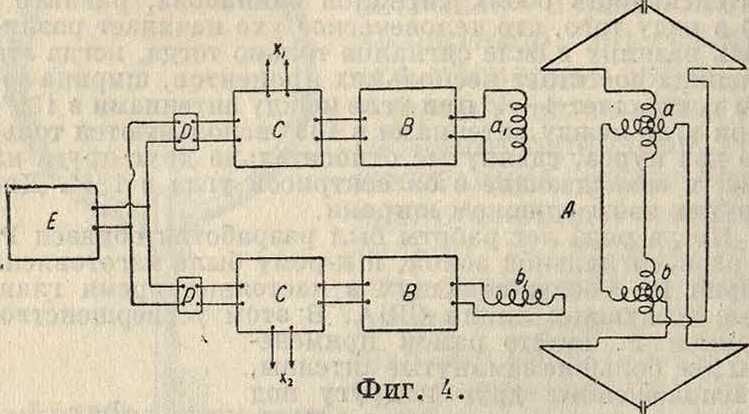
не получилось взаимодействия между элвхментами схемы, несущими токи различной модуляции (на фигура 4 кроме того В—мощный усилитель в 1 000 W, С—промежуточный усилитель в 100 W, D—регулировка фазы, Е—задающий генератор,хг—присоединение к альтернатору с частотой в 65 пер/ск., я?.—к альтернатору с частотой в 86,7 пер/ск.). Напряженность поля в какой-нибудь точке, направление на к-рую в горизонтальной плоскости находится под углом <5 к одной из антенн, выразится формулой:
Ер%=AK[ESl cos (θ - δ) - Es2 sin (0 - δ)], где А и К—постоянные коэфициенты, Е§1 и Es2—напряжения, подаваемые каждой половиной последнего каскада на входные катушки гониометра, Θ—угол поворота подвижных катушек. Расшифровав выражения Es± и Es2, получим
Ер.=АКЕ0 I sin (at [cos (θ-ό)-τ sin (0-<5) cos β] --r COS ωί Sin β sin(0-<5) + γ [cos (ω-ωχ)Ι--COS (со 4· ωχ)1] COS (0-f5)-~[COS (coi + β - co2f)-
-cos (a>t + β + <oc,t) sin (0-<5)]|,
где E0—амплитуда напряжения несущей частоты, получаемого от одной половины мощного усилителя, г—отношение амплитуды напряжения несущей частоты, получаемого от второй половины мощного усилителя, к Е0, άχ—отношение амплитуды МОДУЛИРУЮСЬ-.
щего напряжения частоты —! к Е0, с?2—отношение амплитуды модулирующего напряжения частоты ^ к гЕо, β — угол сдвига фаз между напряжениями с несущей частотой. Беря различные значения для г,
и β, можно получить различные диаграммы излу-
Иг
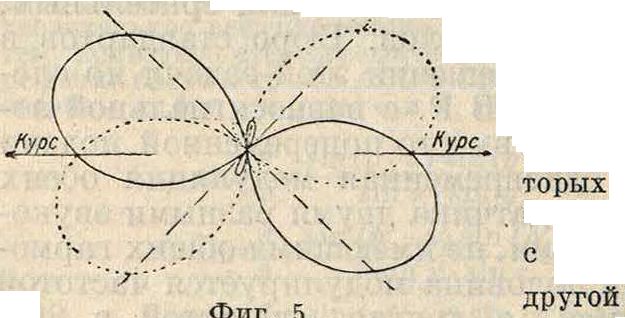
чения, с двумя или четырьмя равно сигнальными зонами и с различным положением зоны относительно антенны. Длина волны как слуховых, так и визуальных Р. порядка 1 000 метров Мощность каждой половины последнего каскада усиления 1 kW. Зрительные индикаторы, предназначенные для реагирования на сигналы описанного визуального маяка, имеются уже нескольких типов, но каждый из них состоит из двух элементов, из ко-один отзывается на сигналы частотой а
2тг другой на сигналы с частотой ί^. Для
2,71
Фигура 5.
того, чтобы показать влияние величипыугла сдвига β на положение зоны, приводим диаграммы отклонения вибраторов индикатора вибрационного типа для двух случаев: для β=0° (фигура 5) и для β ==90° (фигура 6). В первом случае получаются две зоны, во втором— четыре зоны.
Индикаторы сигналов Р. Наиболее широкое применение нашел индикатор вибрационного типа, гл. обр. вслед ствие малого влияния помех на его показа ния. Построенный по принципу язычкового частотомера (смотрите), он представляет собою систему из двух вибраторов, помещенных в поле электромагнитов, обмотки которых приключены к выходу приемника. Вибраторы— тонкие упругие пластинки из стали или элинвара, настроенные каждая на одну из частот модуляции Р. На концах вибраторов укреплены выкрашенные в белую краску демпферы, при колебании вибраторов создающие впечатление двух вертикальных белых полос. При нахождении в зоне обе полоски имеют одинаковую величину, а при отклонении в ту или другую сторону от зоны размах одного вибратора станет больше, а другого меньше (фигура 7). Ширина равносигнальной зоны с индикатором получается около ±1°. Для работы с вибрационным индикатором достаточно иметь на выходе приемника 3—4 V. Шунтируя катушки электромагнита, воздействующие на один из вибраторов, можно уменьшить его чувствительность по сравнению с другим вибратором,
зом проградуированное, прилагается к индикатору. Недостатком вибрационного индикатора является то обстоятельство, что отклонение от зоны приходится определять путем сравнения двух отклонений, а не путем получения прямого отсчета.
Для получения прямого отсчета был предложен стрелочный индикатор (фигура 8).
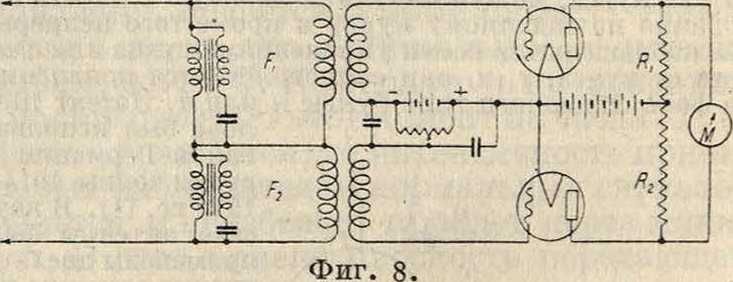
К выходу приемника приключена цепь из двух фильтров низкой частоты F1 и F2. С каждым из этих фильтров индуктивно связана цепь сетки одной из электронных ламп, составляющих плечи моста. При равенстве сигналов той и другой частоты мост сбалансирован, и стрелка прибора М стоит на 0°. Прибор М представляет собою микроамперметр с 0° посредине. Когда сигналы одной частоты сильнее сигналов другой частоты, стрелка прибора М отклонится в соответствующую сторону. В последнее время вместо электрич. фильтров, не обладающих достаточно высокой фильтрующей способностью, применяются механич. фильтры виб-
рационного типа, а вместо моста с лампами применяются два оксидных выпрямителя (смотрите), включенных навстречу друг другу. В их общую цепь включен микроамперметр.
Кроме описанных систем индикаторов были испробованы в качестве индикаторов неоновые лампы; цепь одной из них была индуктивно связана с фильтром одной частоты, а другая—с фильтром второй частоты. При нахождении в зоне горят обе лампы, при отклонении от зоны одна лампа горит, другая гаснет. Так как в визуальном маяке положение равносигнальной зоны зависит от очень многих факторов, необходимо иметь на самом передатчике прибор для наблюдения за положением зоны. Для этой цели м. б. применен любой из описанных выше индикаторов, но т. к. с их помощью положение
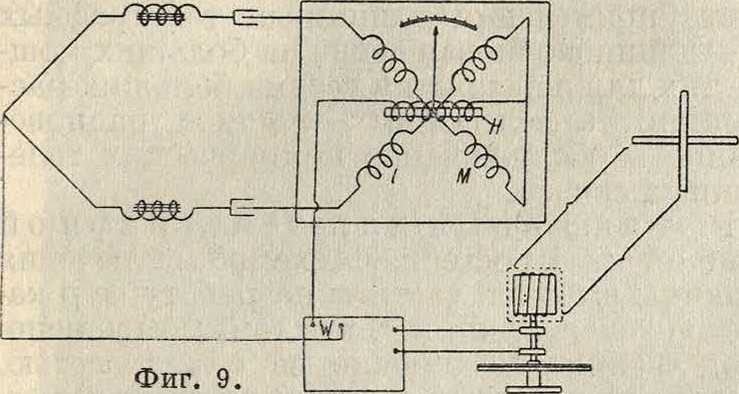
зоны м. б. определено с точностью не больше 1°, то был разработан для этой цели дифференциальный прибор электродинамического типа (фигура 9).
Он состоит из трех катушек: двух неподвижных L и М, закрепленных под углом 90° друг к другу, и одной подвижной Н, находящейся в их поле. Одна из неподвижных катушек является частью цепи, настро-•енйой на частоту 65 пер/ск., другая—цепи, настроенной на частоту 86,7 пер/ск. В подвижной катушке текут токи той и другой частоты. С подвижной катушкой связана стрелка. При равенстве токов обеих частот стрелка стоит на середине, при отклонении от равносигнальной зоны стрелка отклонится в соответствующую сторону.
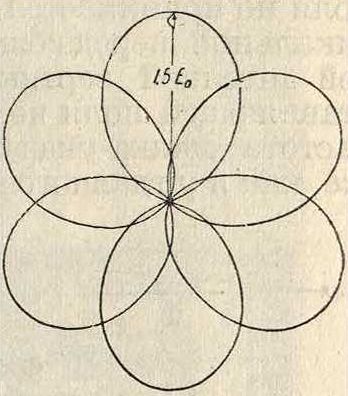
В последнее время в США разработан 12-курсовой визуальный Р. Этот Р. (фигура 10) состоит из задающего
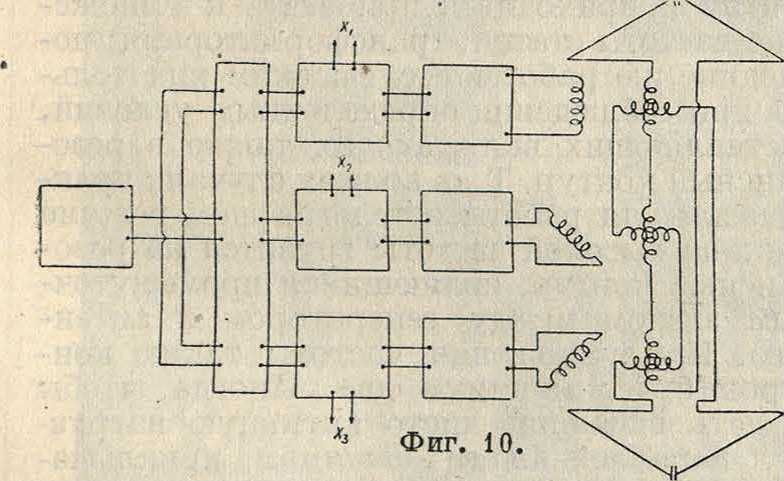
генератора радиочастоты и трех усилителей, модулированных тремя частотами: 65, 86,7 и 108,3 пер/ск. Модуляция осуществляется тремя машинами переменного тока, сидящими на одном валу. На фигуре 10 хг— присоединение к альтернатору с частотой 65 пер/ск., *2—86,7 пер/ск., я3—108,3 пер/ск. Сдвиги фаз между напряжениями задающей частоты, подаваемыми на усилители, подбираются равными 120°, вследствие че-то в горизонтальной плоскости получается 12 симметрично расположенных курсов (фигура 11). Усилители питают две. перпендикулярные замкнутые антенны через гониометр,состоящий из трех отдельных гониометров, расположенных один над другим. Индикатор для указания сигналов 12-курсового Р.—вибрационного типа и состоит из трех отдельных вибраторов, настроенных на соответствующие частоты.
Описанные выше Р. предназначаются для указания главного курса самолету или судну. Дальность действия их ограничивается ночными колебаниями зоны. При приеме на обычную самолетную антенну (смотрите Самолетная радиостанция) колебания зоны делают невозможным использование ночью Р. на расстояниях 200 км и более. На расстоянии 80 км неправильные показания составляют по времени 25%, а на расстоянии 160 км они составляют 50% всех наблюдений. Применение (для приема) стержневой вертикальной антенны сильно уменьшило колебания зоны, так что на расстоянии в 200 км максимальная ошибка составляет 10—
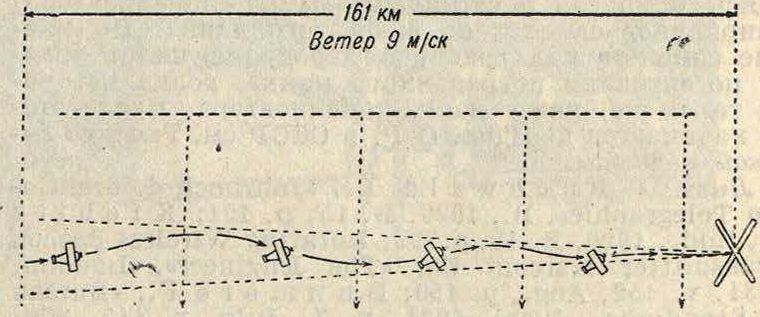
20°, причем колебания зоны носят периодич. характер, то есть получается попеременное отклонение зоны то вправо то влево. Эти колебания не очень мешают вождению самолета по курсу, и нормальным радиусом действия Р. считается 200 км. Одним из преимуществ применения Р. по сравнению с применением радиопеленгатора является то обстоятельство, что при вождении самолета по Р. отклонение от прямого пути за счет сноса ветра возможно только в пределах равносигнальной зоны, тогда как при вождении самолета по пеленгатору снос за счет ветра очень сильно отклоняет путь самолета от прямой. На фигуре 12а изоб
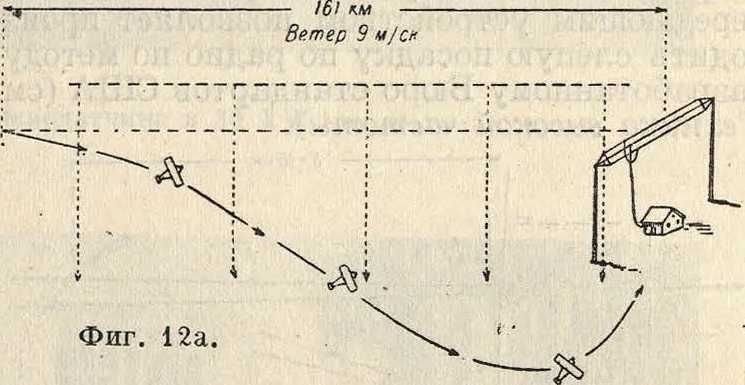
ражен путь самолета при вождении его по пеленгатору, установленному на самолете, а на фигуре 126—при вождении его по Р.
Кроме главных Р. есть несколько типов вспомогательных маяков. При оборудовании линии Р. в месте пересечения зон от двух Р. ставятся т. н. маяки-указатели с мощностью порядка нескольких W для указания пилоту, над какой точкой он пролетает. При вождении по визуальному маяку на самолете помещается еще один вибратор, настроенный на частоту модуляции маяка-указателя, равную 40 пер/ск. Антенной маяка-указателя служит одна вертикальная рамка, помещен-
Фигура 126.
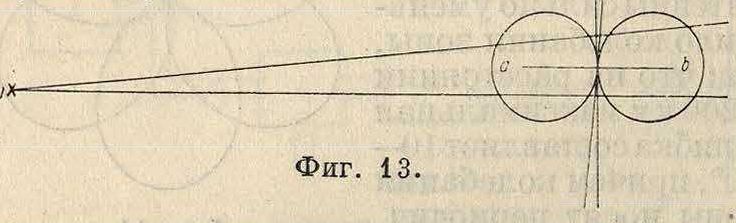
ная так. обр. (фигура 13), что направление аb максимального ее излучения совпадает со средней линией- равносигнальной зоны. При приближении самолета к маяку-указателю сначала получается прием его сигналов, потом при полете прямо под ним они исчезают, а дальше опять появляются. Исчезновение приема над маяком объясняется тем, что при приеме на вертикальную антенну горизонтальная слагающая поля не принимается, а над вертикальной передающей замкнутой антенной вертикальной составляющей поля нет. Несущая частота маяка-указателя такая j же, как и у главного маяка. Что
бы сигналы двух главных маяков не интерферировали между собой, применяют для них различные несущие частоты, а маяки-указатели имеют по два передатчика с разными волнами. — Другие вспомогательные радиомаяки применяются на аэродроме. Это так называемым пограничные маяки и маяки-локализаторы. Пограничный маяк является маяком-указателем, показывающим границу аэродрома. Маяк-локализатор—визуальный Р. с двойной модуляцией, теми же частотами модуляции, что и главный маяк, мощностью в 200W, с антеннами в виде небольших рамок. Маяк-локализатор совместно со специально разработанным на ультракоротких волнах передающим устройством позволяет производить слепую посадку по радио по методу, разработанному Бюро стандартов США (смотрите Техника высокой частоты).
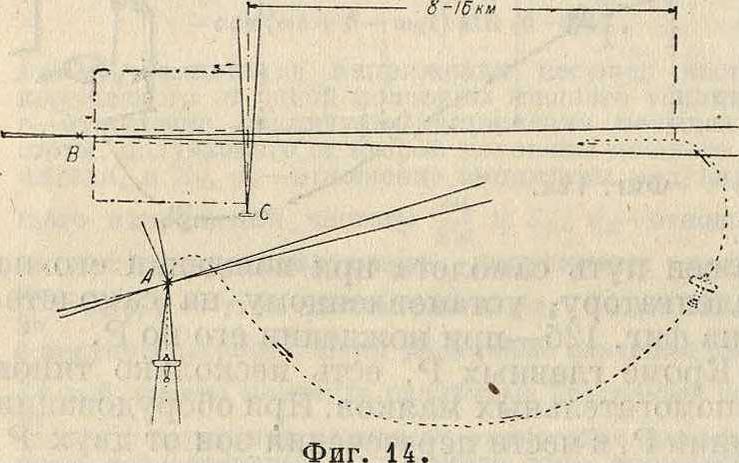
На фигуре 14 цан план аэродрома, оборудованного всеми типами Р. Пунктиром очерчен аэродром. В А помещен главный курсовой маяк с большими антеннами, удаленный от аэропорта, чтобы его антенны не мешали при подъеме и посадке самолетов. В С помещен пограничный маяк, а в В—маяк-локализатор. Обнаружив по исчезновению сигналов, что самолет пролетает под главным маяком, пилот перестраивает приемник на частоту маяка-локализатора, отличающуюся от частоты главного маяка на 50—60 кц., и, пользуясь компасом и сигналами маяка - локализатора, направляет самолет по зоне этого маяка. Положение самолета над границей аэродрома пилот узнает по сигналам пограничного маяка, волна которого такая же, как у маяка-локализатора. После этого начинается посадка. О Р. в СССР см. Техника высокой частоты.
Лит.: Ч В и с k w а 1 d E., «Jahrbuch d. drahtlo-sen Telegraphies, В., 1920, В. 15, p. 121; К i e b i t z F., ibid., 1920, В. 15, p.299; Rotating Wireless Beacon Transmitter Marconi Co, «The Engineer», London, 1931, y. 152, Aug., p. 159; D u n m о r e F., «Bureau of Standards», Wsh., 1931, v. 7, July, p. 147—170; Diamond A. a. Dunmore F., Ibid., 1930, v. 5, p. 897—931; Davies G., ibid., 1931, v. 7, p. 195— 213; Hinman W. S., ibid., 1931, v. 7, p. 37—46; Diamond A. a. Davies G., ibid., 1931, v. 6, 5; К e a r F. a. W i n t e г m u t e G., ibid., 1931, v. 7, p. 261—287; Blon.del A., «Annales des ponts et chaussOes», Paris, 1930, v. 6, p. 140; S m i t h-R o-
seR.L., «Journ. of the Institution of the Electri cal Engineers», L., 1931, v. 69, p. 523—532. Библиография частично указана в «Proceedings of the Inst, of Radio-Engin.», N. Y., 1928, v. 16, 7, p. 996; 1930, v. 18, 5, p. 838, 12, p. 2101; SmiUi-Eose R. L., The Orfordness Rotating Beacon a. Marine Navigation, «Dept. Scien. a. Indus. Research Radio Research»,
L., 1931, Special Report, 10; Smith-Rose R. L. a. Thomas H. A., «Journal of Sciep.tif. Instruments», L., 1931, v. 8, 3; HecitN. F. S. and Alexander D. P., «Journal of the Institution of the Electrical Engineers», L., 193 0, v. 69, 4.08; В 1 on-del A. et BessonP., Le Balisage radioClectrlque-desAlignements, «La Technique Moderne», P., 1931, V. 23, 7. P. Шифзнбауер.