 > Техника, страница 96 > Радионавигация
> Техника, страница 96 > Радионавигация
Радионавигация
Радионавигация, наука о применении радиоволн в целях вождения или ориентирования в пространстве подвижного объекта, имеющего соответствующую радиостанцию. Р. — один из от делов техники высокой частоты (смотрите), позволяющих осуществить безопасность движения судов (как морских, так и воздушных). Решение задачи Р. основывается на существовании закономерной зависимости между электрич. и магнитной компонентами электромагнитной волны и направлением движений последней (смотрите Волны электромагнитные), а также на свойстве волн распространяться по дугам большого круга. Для реализации поставленной в Р. цели необходимо определенное овладение процессом в пространстве: или создание и изменение электромагнитного поля по ранее заданному закону или однозначный анализ (определение направления) такого поля. Отсюда вытекают два возможных метода Р.: направленное излучение или направленный прием (смотрите Направленное радио). Р., как и всякая радиосигнализация, осуществляется путем совместной работы передающего и приемного радиоустройств, причем необходимым условием является сообщение направленных свойств одной из этих двух станций. Направленные передатчики (точнее передающие устройства) принимаются с помощью ненаправленных приемников (точнее приемных устройств), причем положение последних определяется по характеру принимаемого сигнала; направленные приемники дают возможность определить направление, в котором следует искать любой ненаправленный передатчик. Решающим для Р. фактором являются в обоих случаях радиосети, применяемые в самых разнообразных формах; выбор же схемы и конструкции собственно передатчика и приемника особой роли не играет.
Методы Р. используются в настоящее время как при мореплавании, так и в авиации; при этом в первом случае преимущественно применяется направленный радиоприем, а во втором — направленная радиопередача; однако эти характеристики не являются общими: способы реализации Р. в разных государствах сильно отличаются один от другого. С навигационной точки зрения методы Р. могут быть сгруппированы в следующие 3 главн. раздела: 1) передача от корабля и (направленный) прием на неподвижной станции; результат определения на последней местоположения корабля передается в форме обычных радиосигналов кораблю; 2) передача от неподвижной радиостанции и (направленный) прием на корабле; 3) передача (направленная) от неподвижной радиостанции и прием на корабле обычным приемным устройством. Как общее правило направленные передатчики, применяемые в Р., носят название радиомаяков (смотрите), а направленные приемники, используемые в Р., — радиопеленгаторов, или пеленгаторов (смотрите); ненаправленные передатчики, применяемые в Р., часто называются радиофарами. Термин «пеленгатор» является общим для всех видов направленного радиоприема в Р. как на корабле, так и на неподвижной станции; часто пеленгатор, установленный на корабле, называется также радиокомпасом (смотрите). При первом методе корабль посылает определенные сигналы (по международному коду), содержащие просьбу к специальной неподвижной радиостанции, имеющей направленный прием, об определении местоположения корабля. По получении от неподвижной станции согласия корабль посылает специальные сигналы; во время передачи таких сигналов 2 или 3 станции (неподвижные), работающие координированно с первой неподвижной станцией, производят его засечку (смотрите Засечка в радиотехнике). Результат определения местонахождения корабля (обычно в виде долготы и широты) передается снова первой станцией кораблю. В этом способе применяются на неподвижных станциях следующие главные системы пеленгаторов: а) поворотная рамка, б) двойная рамка Робинзона (редко), в) гониометр (смотрите) Беллини и Този или г) сист. Эйдкока.
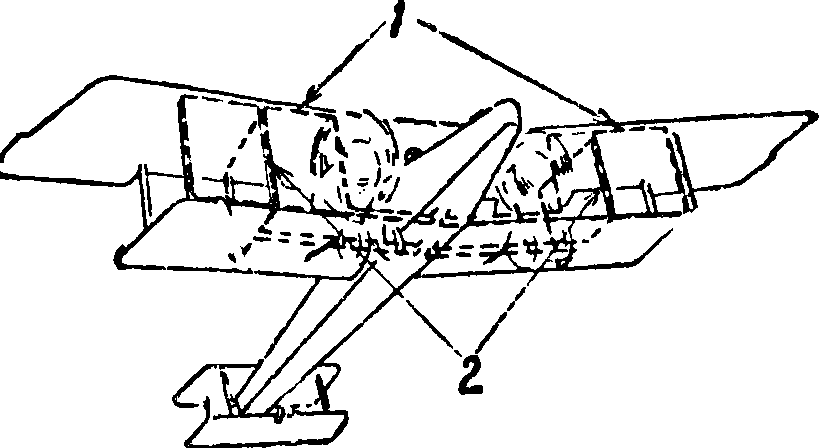
Второй метод реализуется различными вариантами. Наиболее общим для ряда стран и для обоих видов Р. (морской и авиационной) является применение обычного рамочного пеленгатора (смотрите Рамка). В Англии на самолетах нередко устанавливались пеленгаторы в виде двойной рамки Робинзона. При одном типе конструкции этой системы рамки располагаются в крыльях самолета. В другом типе конструкции — фюзеляжном — рамки монтируются под прямым углом одна к другой на каркасе, размещенном в фюзеляже самолета. В Англии также встречались на кораблях пеленгаторы Беллини и Този.
Наиболее современной установкой радионавигационного приема является прибор, с 1935 г. весьма часто применяемый в авиации США и Европы под названием «радиокомпаса» в собственном смысле этого слова. По существу это — рамка, или другой вид замкнутой антенны, обычно неподвижно закрепляемая так, что плоскость ее перпендикулярна продольной оси самолета, и небольшая открытая антенна, приемник, коммутатор того или иного вида и визуальный индикатор, показывающий отклонение в определенную сторону самолета от нулевого пеленга на ту передвижную радиостанцию, на к-рую летит самолет. Стрелка индикатора передвигается влево или вправо от центрального положения в зависимости от того, будет ли фаза напряжения, возбуждаемого в рамке, опережать или отставать от фазы напряжения, возбуждаемого открытой антенной (смотрите Еардиоидные схемы). Эта разность фаз является функцией величины и направления угла, образуемого фронтом волны и плоскостью рамки. Принцип действия радиокомпаса представлен схематически на фигуре 1; она изображает диаграммы направленности открытой антенны (окружность) и рамки (восьмеркообразная кривая). Схема фигура 1 изображает преобразование характеристик рамки и отклонения стрелки индикатора влево или вправо: 1 — направление желаемого курса; 2 — фронт волны; 3— диаграмма направленности, получаемая от неподвижной, ненаправленной антенны; 4 — Θ — угол отклонения от курса; б — j направление полета (стрелки показывают составляющие напряжения, вызываемого рамкой и антенной при полете в этом направлении);
6 — диаграмма направленности, получаемая от рамки (положительна для правой ” половины, отрицательна — для левой); 7—результирующая диаграмма от рамки и антенны; 8 — напряжение при отклонении от курса вправо на угол Θ; 9 — результирующая диаграмма при изменении полярности рамки на обратную; 10 — диаграмма отрицательного тока; 11 — диаграмма положительного тока; 12 — отрицательный ток при отклонении на угол Θ от курса влево; 13 — положительный ток при отклонении на угол Θ от курса вправо; 14 — положение плоскости рамки при отклонении наугол Θ от курса вправо. Когда 6 =90° (направо), то имеем максимум напряжения в рамке (плоскость ее под прямым углом к фронту волны). Если же Θ=90° (налево), то фаза индуктируемого в рамке напряжения будет сдви нута точно на 180° относительно фазы, когда Θ=90° (направо), то есть напряжение, вызываемое рамкой при отклонении от курса влево, противоположно напряжению, вызываемому рамкой при отклонении вправо. На практике элек-трич. параметры антенн и связь их с приемником выбираются так, чтобы максимальное напряжение, вызываемое рамкой (когда Θ=90° влево или вправо), имело то же абсолютное значение, как и напряжение, получающееся в контуре приемника от открытой антенны. Кардиоида на фигуре 1, б сплошной линией представляет просто сумму двух кривых напряжения на фигуре il, а. Из нее видно, что величина результирующего напряжения изменяется вместе о перемещением
I I I I I ! 1 I
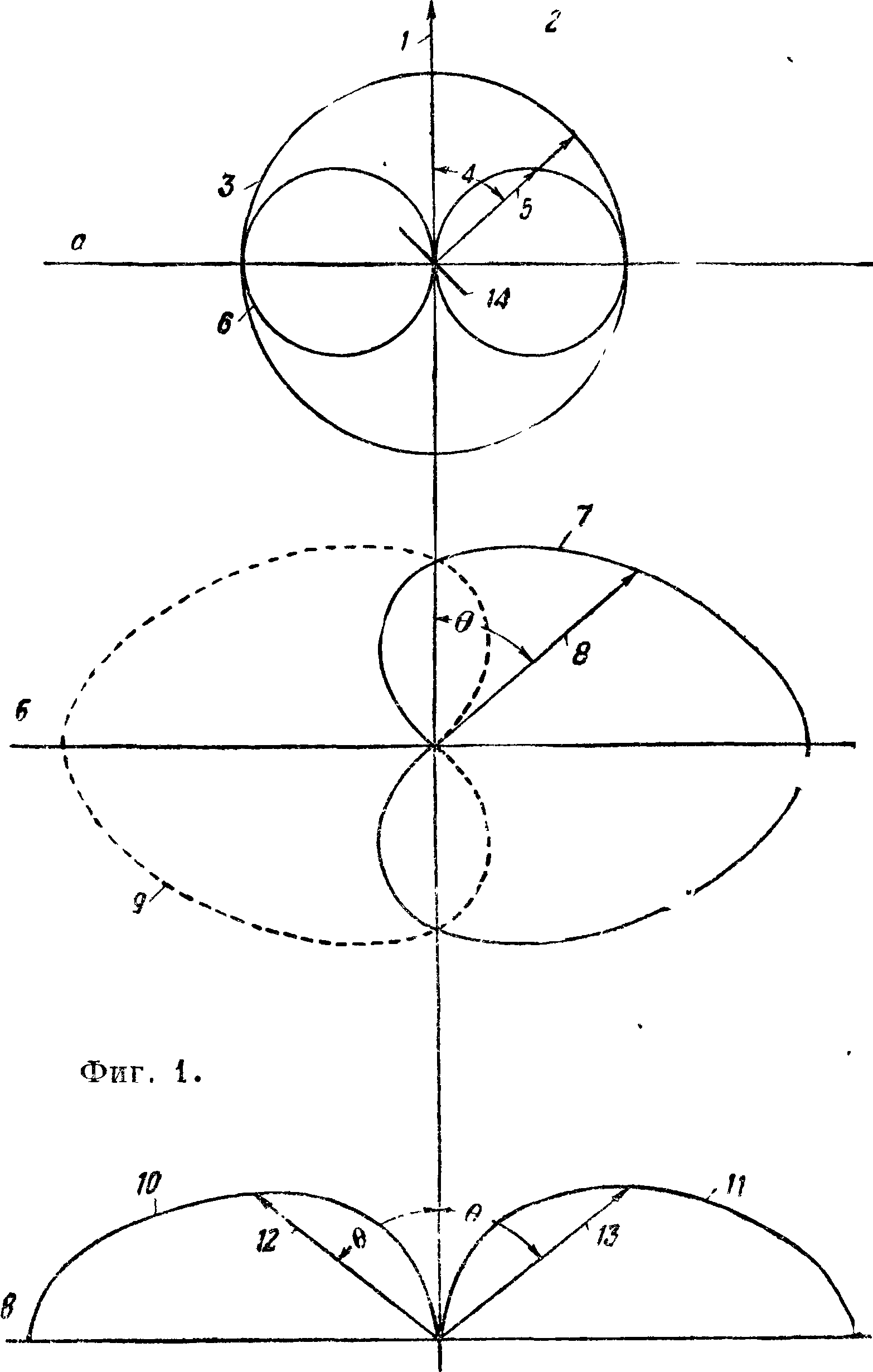
Θ слева направо. Это напряжение не является симметричным относительно оси курса; поэтому определенное отклонение вправо не вызывает того же напряжения, как такое же отклонение влево. Требующаяся симметрия получается при периодич. изменении полярности рамки на обратную. Тогда кардиоида приобретает вид, изображенный пунктиром. Такое периодич. изменение полярности может быть или механическим (например в радиостанции для «полета на цель» — «Zielfluggerat») или, чаще, — электрическим (путем включения лампового генератора звуковой частоты). Схема фигура 1, в изображает разность воздействий между двумя кардиоидами, представленными на фигуре 1, б. Эта разность воспринимается приемником помощью схемы мостика или др. Полученная разность значения напряжения по существу является напряжением переменного тока, когда Θ=0 (по курсу), с положительной составляющей постоянного тока, когда в лежит вправо, и с отрицательной составляющей, когда Θ лежит влево от курса. Эта составляющая постоянного тока проходит через гальванометр постоянного тока о нулем посредине. Отклонение самолета на 2° вызывает смещение стрелки на 3 миллиметров.
Конкретная установка радиокомпаса Крюзи на самолете дана на схеме фигура 2. Радиокомпас Крюзи м. б. установлен на любом самолете. Если рамку его сделать вращающейся, то он м. б. использован и в качестве радиопеленгатора. Удовлетворительно спеленгированные направления можно получать в средних условиях: над землей — на расстоянии 480 км, а над водой — 1 000 км при волнах длиной· более 500 метров При благоприятных условиях указания направления можно получить на расстоянии 2 400 км. Положение стрелки на большой шкале показывает, следует ли .самолет по намеченному пути или отклонился от своего курса. Для сохранения курса пилот должен все время следить за тем, чтобы стрелка находилась в нулевом положении;
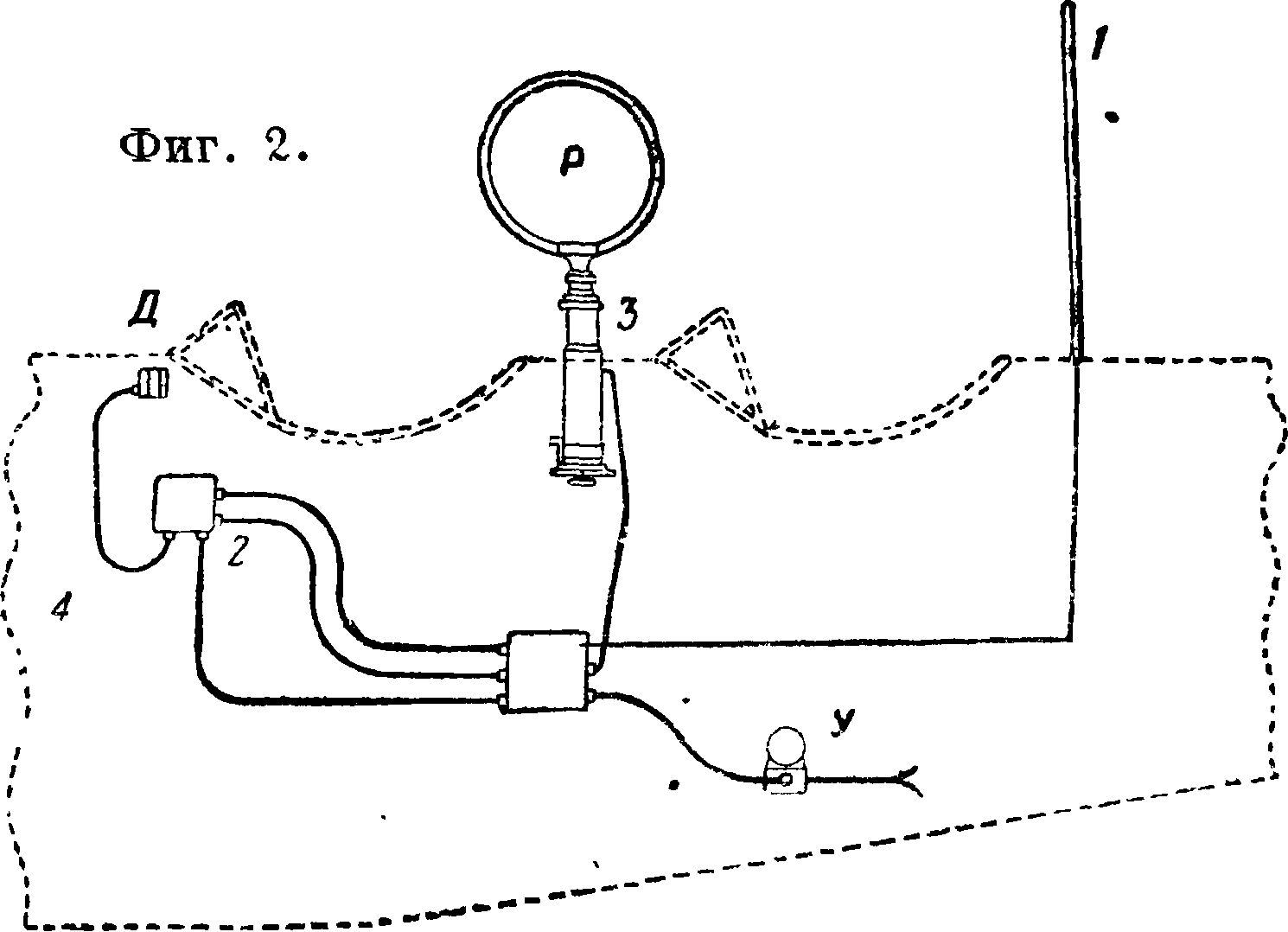
это значительно облегчает управление самолетом и устраняет необходимость все время прислушиваться к радиосигналам. Прибор состоит из радиопеленгаторного приемника, устанавливаемого в любой точке самолета, дистанционного регулятора настройки для автоматич. регулирования (или регулирования от руки) силы звука, прибора переключения, устанавливаемого в доступном для пилота месте, динамометрия, указателя Д найденного направления (на приборной доске) и неподвижной рамочной антенны Р для вождения на цель или вращающейся рамочной антенны, для определения местонахождения. Умформер У и накальная аккумуляторная батарея служат источником питания. (На фигуре 2:
1 — стержневая антенна, 2 — присоединение телефонов, 3 — механизм для вращения антенны, 4 — распределительная коробка.) Радиолелен-гаторный приемник имеет диапазон волн 200 Ч-
2 000 метров Указатель спеленгированного направления типа динамометра, установленный на приборной доске, имеет черный циферблат со светящейся стрелкой и шкалой. Стрелка передвигается на 70°, имеет чувствительность в 100 μΑ (при полной шкале) и может до некоторой степени служить указателем поворота. Съемная обтекаемой формы рамочная антенна, диаметр которой равен 534 миллиметров, имеет лобовое сопротивление приблизительно в 1,2 килограмма при скорости в 304 км/ч и 3,64 килограмма при скорости 400 км/ч, когда она находится под прямым углом к направлению полета. Вращающаяся рамочная антенна м. б. повернута рукой на 230° и закреплена в любом положении. Вместе с рамочной антенной применяются стандартная мачта для антенны высотой в 1,633—
2,44 метров или жесткая антенна длиной в 2,75—3 метров Приемник, пеленгатор, рамочная антенна и вращающийся механизм весят приблизительно 20,5 килограмм. При пользовании радиопеленгатором; пилот выбирает станцию, надевает головные телефоны и производит настройку на эту станцию посред ством дистанционного регулятора. Если стрелка стоит на нуле, самолет летит по направлению к радиовещательной станции, если она отклонилась влево от нуля, то самолет держит курс вправо, и пилот должен до тех пор поворачивать самолет влево, пока стрелка не займет нулевого положения.
Поскольку пеленгаторы (рамочный, гониометрический и Эйдкока) уже описаны (смотрите Пеленгатор, Рамка, Замкнутая антенна, Радиокомпас, Гониометр), далее приводятся лишь детали одной из моделей (принятых в воздушном флоте Великобритании) пеленгатора по системе Робинзона. Переключатель (основную схему действия пеленгатора Робинзона см. Пеленгатор,
фигура 9) устраивается в форме радиального коммутатора, на лицевой стороне которого расположены 3 сектора (белый, красный и зеленый), соответствующие трем схемам включения рамок (переключение происходит автоматически). При первом положении (на красном секторе) вспомо-
Фигура 3.
п с
Фигура 4.
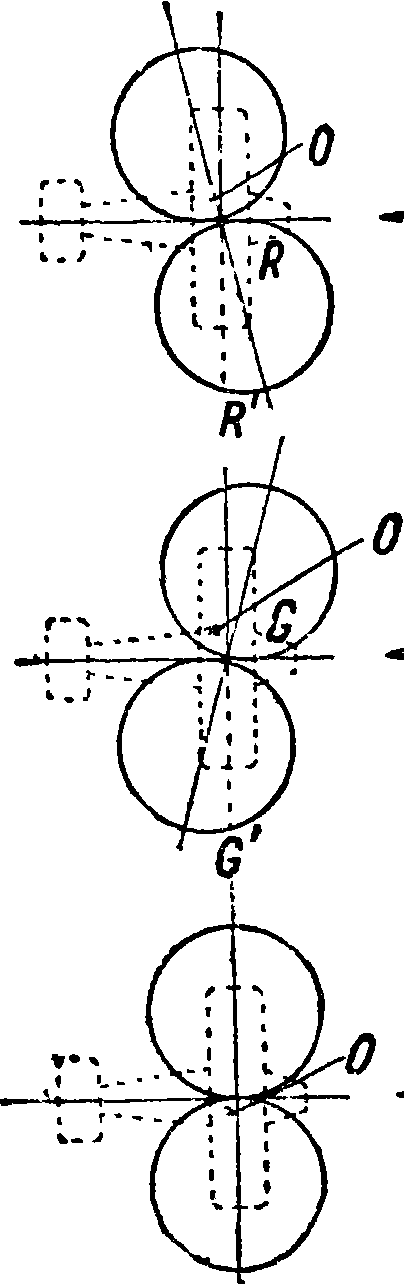
гательная 1 и главная 2 рамки соединены последовательно (фигура 3 и 4), а результирующая диаграмма принимает форму, показанную на фигуре 4 (3 — усилитель). Если самолет летит прямо на передающую радиостанцию, то сила принимаемого сигнала будет примерно пропорциональна отрезку OR (фигура 4, а). Если переключатель на втором положении (зеленый сектор), то в вспомогательная рамка включается к главной обратными концами; прием от станции будет пропорционален отрезку OG (фигура 4, б). Для того чтобы удостовериться в том, что сигналы соответствуют OR и OG, а не OR и ОG (последнее равносильно ошибке при Р. на 90°), введен третий (белый) сектор, вводящий в схему только вспомогательную рамку; вместо главной катушки в цепь включается балансная катушка 4 (во избежание нарушения резонансного положения). В этом случае полярная диаграмма будет соответствовать фигура 4, в, причем при правильном полете (на станцию) в телефоне не должно быть слышно сигналов.
На практике стрелка коммутатора вращается со скоростью ок. 1 об/ск.; таким обр. пилот при правильном курсе слышит в своем телефоне два сигнала равной силы с паузой (молчание) между ними, соответствующей приему только на вспомогательную катушку. В этой модели отношение площади витков вспомогательной катушки к таковой же главной катушки порядка также и принцип гониометрический: в этом случае ф-ию вращающейся рамки выполняет искательная катушка гониометра. Построенное Бю-зиньи по этому принципу 10-ламповое приемное устройство определяет пеленги с точностью до 2° при напряженности поля пеленгуемой радиостанции в 40 (xV/м. Вследствие относительного поворота катушки S в поле магнита М образуются добавочные индукционные токи, искажающие показания. Поэтому в цепи катушки выбирают сопротивления достаточно большими, а оконечные лампы в приемнике применяют с высоким внутренним сопротивлением. Согласно Бю-зиньи при 600 об/мин. ошибки указателя достигают 1°. Для тех случаев, когда однозначность пеленга не требуется, Бюзиньи предложил не ставить стесняющей (аэродинамически) вспомогательной антенный использовать тот же принцип, но без кардиоидной схемы по диаграмме в виде двух окружностей.
Третий метод Р. основан на применении на неподвижной радиостанции той или другой системы направленной радиопередачи; при этом указание курса или ориентировка на корабле
Фигура 6.
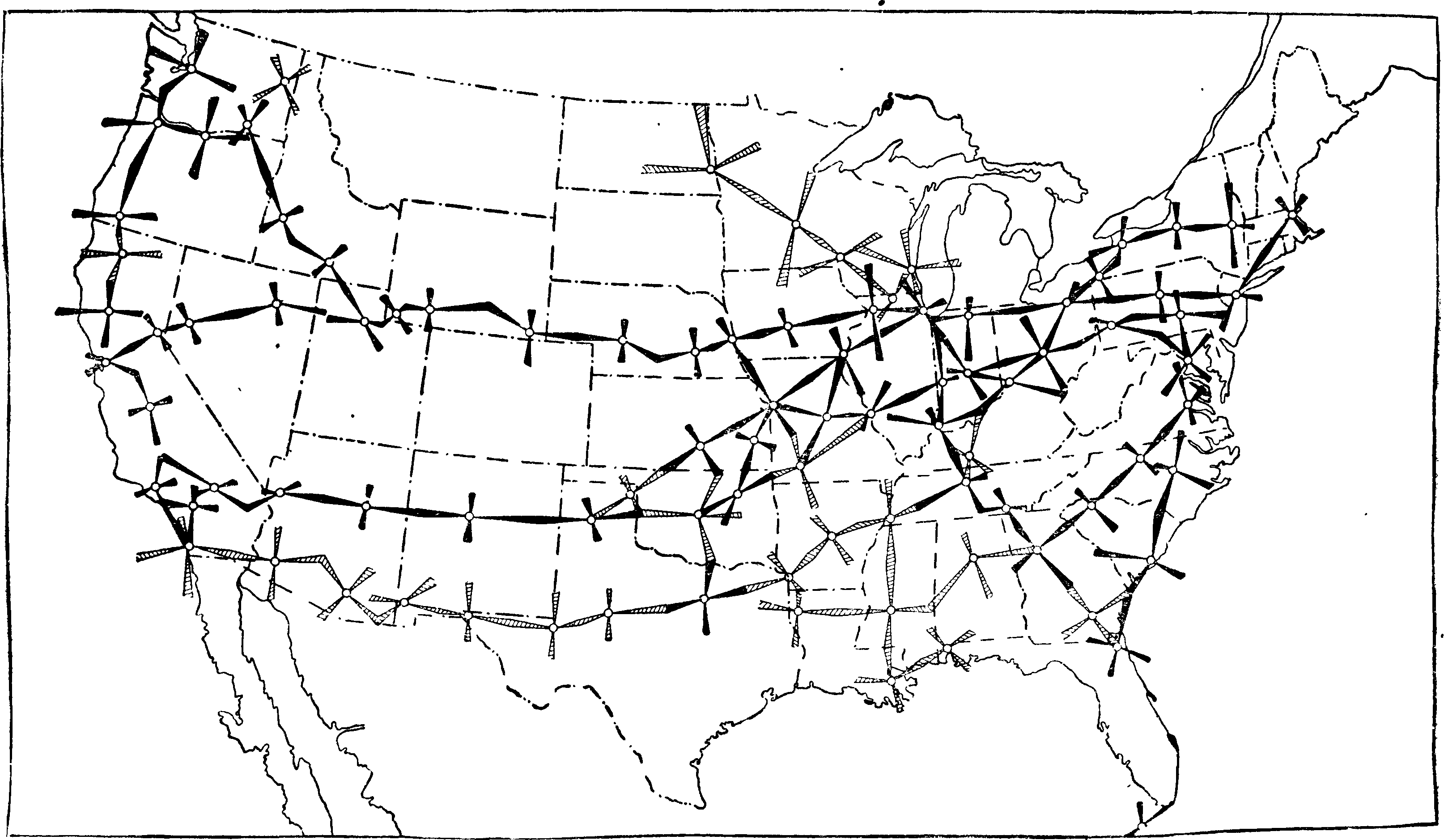
1:6. Наряду со слуховыми пеленгаторами описанных выше систем за последние годы начали приобретать практич. значение также и пеленгаторы с автоматическим отсчетом по лимбу азимута направления распространения электромагнит-Z ных волн принимаемой радиостан ции. Из предложенных Бюзиньи, Берндорфером-Дикманом, Хеллом и некоторыми другими авторами схем ниже описывается только схема Бюзиньи, представленная на фигуре 5. К рамке Я, вращающейся вокруг вертикальной оси Z — Z, жестко прикреплен магнит М магнит-но-электрич. системы. С контуром рамки связана ненаправленная приемная антенна т. обр., что результирующая диаграмма направленности получается кардиоидной (смотрите Кар-диоидные схемы). Воспринятая энергия выпрямляется и после усиления подводится к по
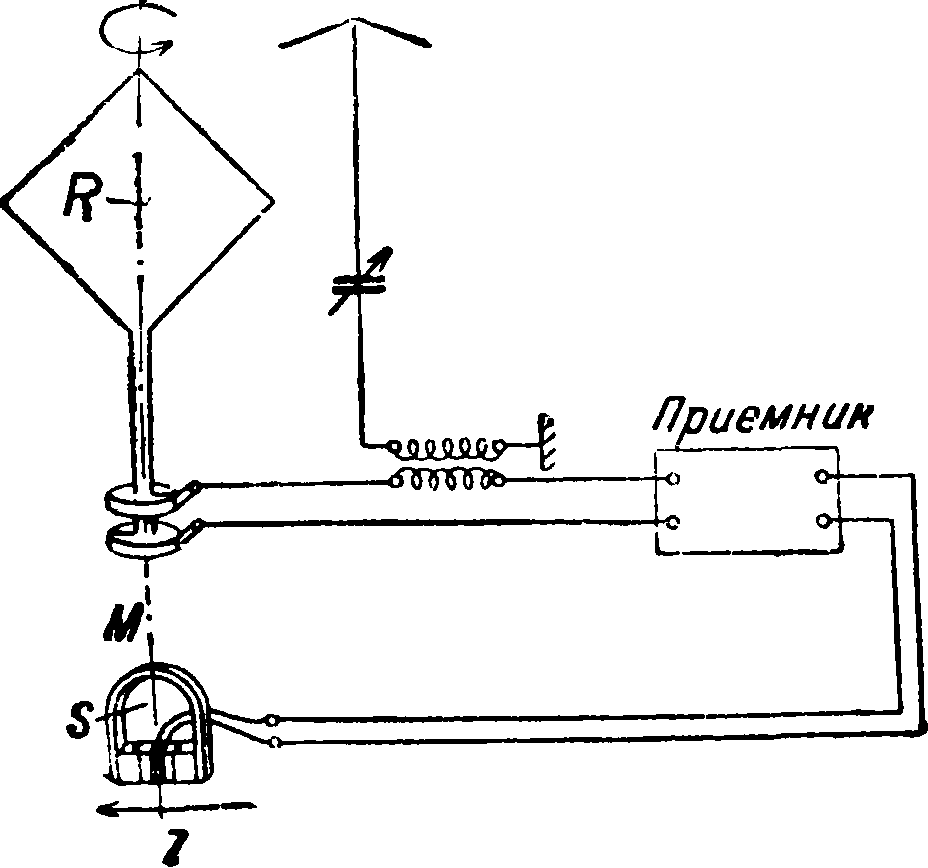
фигура 5.
движной рамке S индикатора. При этом создается пульсирующий ток, получающий за каждый оборот рамки один максимум. Т. к. поле постоянного магнита М вращается синхронно с рамкой, то его положение относительно рамки не изменяется; вследствие этого поле рамки S получает максимальное значение только в одном определенном (однозначном) положении рамки. Поэтому подвижная рамка S устанавливается в том положении, к-рое ее вынуждает занять поле принимаемой волны. Если поле между полюсными наконечниками магнита параллельно плоскости рамки и если указатель на подвижной рамке индикатора укреплен так, что он параллелен направлению оси подвижной рамки, то при правильном включении катушек указатель показывает прямо направление на передатчик. Однозначное (то есть с устраненным 180°-ным сомнением) определение получается и тогда, когда диаграмма направленности не является строго кардиоидной. Вместо вращающейся рамки можно применить получается путем приема на приемник с обычной антенной без какого-либо направленного антенного устройства. Передающая радиостанция в этой системе называется радиомаяком. Применяются два типа радиомаяков: 1) для самоориенти-рования и 2) для курсовождения, иначе называемые: первый — радиомаяк с вращающейся диаграммой излучения и второй — радиомаяк с равносигнальной зоной. Новыми усовершенствованиями в радиомаяках (основные принципы обоих типов см. Радиомаяк) являются: а) Радиомаяки с равносигнальной зоной, притом преимущественно слуховые (нашли весьма широкое применение в США); на фигуре 6 представлена государственная сеть радиомаяков (на 1933 г.) для обслуживания важнейших авиалиний, б) Новые типы, где вместе с сигналами, указывающими зону, передаются пилоту на той же волне одновременно телефоном метеорология, бюллетени; при этом телефонный передатчик получает возбуждение от общего с радиомаячным передат чика задающего генератора и работает на ненаправленной антенне (вертикальный провод). На самолетном приемнике путем применения фильтров (смотрите Электрические фильтры) происходит выделение модулирующих (низких) частот равносигнальной зоны от диапазона частот, соответствующего обычной телефонной речи. Во избежание взаимных влияний между двумя передатчиками одного и того же радиомаяка (телефонным и задающим зону) излучение с направленных антенн происходит без несущей волны, в) Для большего использования одного и того же курса, задаваемого радиомаяком, устраиваются одновременно два полета: один по зоне, а другой с определенным отступлением от зоны. Чтобы избежать опасности столкновения с другими самолетами, чувствительность одного из язычковых индикаторов (смотрите Радиомаяк) понижается; тогда при равном отклонении язычков индикатора самолет летит по курсу, образующему с биссектрисой равносигнальной зоны определенный небольшой угол.
Один из усовершенствованных стрелочных индикаторов схематически изображен на фигуре 7.
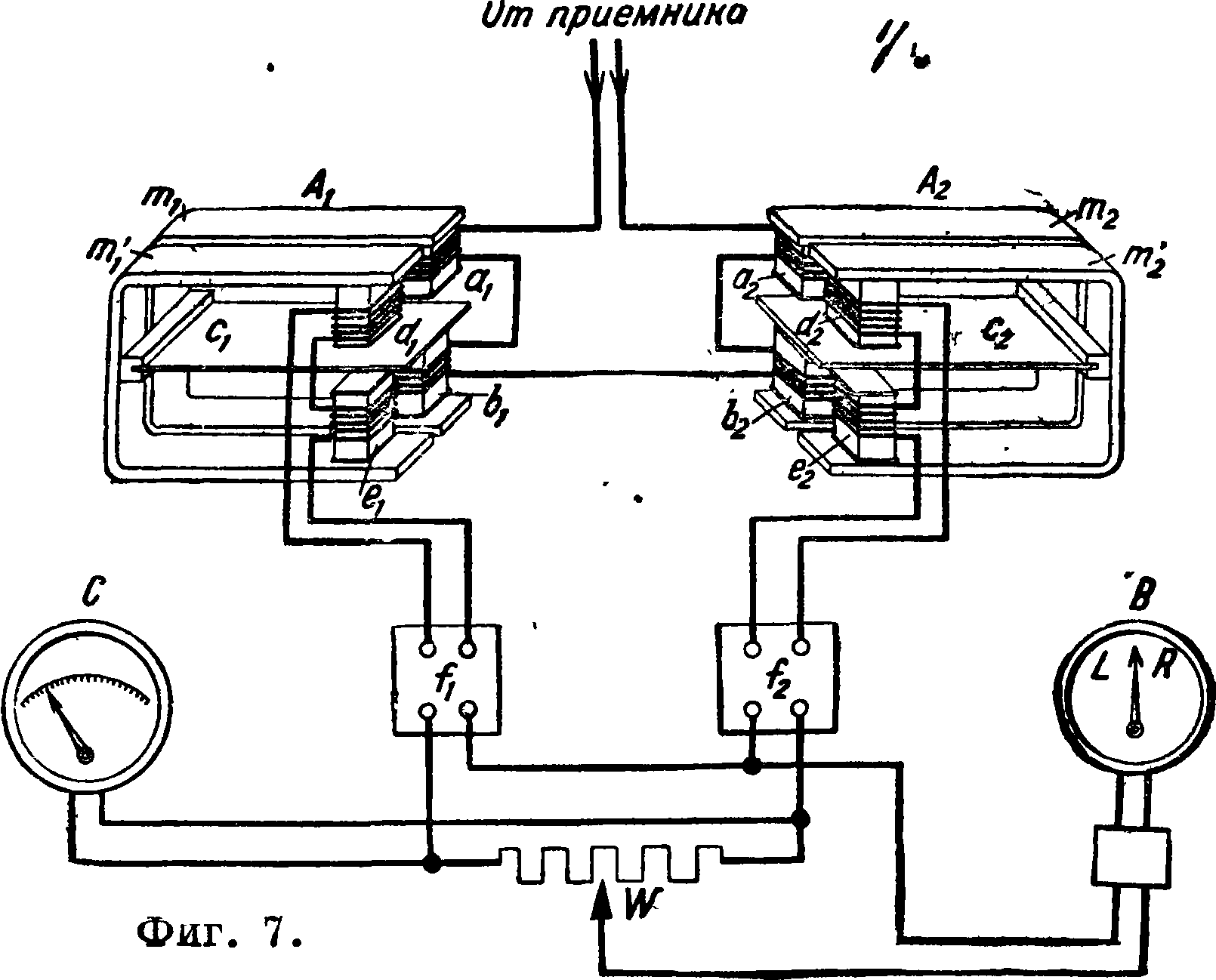
К выходу приемника приключено последовательно по 2 намагничивающие катушки ахbх и а2Ь2, являющйеся деталями механич. фильтра вибрационного типа; катушки находятся в поле постоянного магнита тх (соответственно т2). Язычки сх и с2 реагируют исключительно на надлежащие модулирующие частоты. Для первой модели индикатора этих элементов было уже достаточно для конструирования соответствующего стрелочного прибора. В новом типе индикатора язычки с i и с2 сделаны шире настолько, что своей второй половиной они находятся в поле новых двух пар катушек д,гег (соответственно d2e2), находящихся в поле второго постоянного магнита т[ (т2). Вследствие вибраций язычков в этих последних катушках, называемых генераторными, индуктируются эдс, подаваемые затем к купроксным выпрямителям /х (соответственно /2). На стороне постоянного тока включено сопротивление W. Если напряжения точно равны, то включенный по схеме моста стрелочный прибор В гальванометрич. типа показывает среднее положение: это означает, что самолет летит по заданному радиомаяком курсу. Смотря по тому, какое из выпрямленных напряжений (на f1 или на /2) доминирует, получается на стрелочном приборе правое R или левое L отклонение, указывающее на смещение самолета влево или вправо от заданного курса. Переключатель служит для перемещения отклонений в зависимости от того,
летит ли самолет на радиомаяк или от него. Т. к. такой индикатор действует по принципу н у-левого метода, то для контроля наличия вообще напряжения на сопротивлении W включен прибор С. Путем перестановки скользящего контакта на сопротивлении W можно получить несимметричные показания. Этот вариант как-раз соответствует полету по курсу, образующему с главным небольшой угол по радиальному побочному курсу, причем стрелка прибора так же, как и раньше, должна находиться в нулевом положении. Такой прибор назван девиоме-т р о м. г) В Германии Крамар разработал несколько иную систему подачи сигналов: обе направленные антенны излучают одновременно, но модулируются по вытянутым пилообразным кривым, симметричным в зеркальном отображении, то есть если в одной направленной антенне наибольшая амплитуда, то во второй — наименьшая; в другие моменты времени получаются промежуточные значения. Если приемник получает несимметричные кривые (например самолет не в зоне), то на индикаторе получается боковое отклонение. Благодаря своей зеркалообразной структуре обе модуляции при равенстве напряженностей ноля сливаются в одну продолжительную черту.
Борьба с ночным эффектом при Р. (появлением ошибок при Р. ночью и в сумерки). Ночные ошибки возникают при всех методах Р., использующих длинные и средние волны, как только при этом переходят за некоторую определенную величину расстояния. Ночной эффект заключается в том, что направления движения электромагнитных волн, правильно и всегда одинаково определяемые при Р. днем, с наступлением сумерек начинают колебаться, вследствие чего получаются ошибочные определения пеленга. Это явление наблюдается обычно в течение всей ночи, но наиболее сильно выражается б. ч. во время сумерек. Вообще говоря, ночные колебания пеленга обусловливаются теми же причинами, как и явления замирания (смотрите) в тех же самых диапазонах волн. К этому заключению можно прийти уже из чисто внешнего сравнения обоих эффектов. Ночной эффект и замирание возникают в одно и то же время и при тех же самых дальностях распространения, они ярче выражены при диапазоне более коротких волн и наконец при распространении над сушей оба явления проявляются сильнее, чем над морем. Общей для обоих явлений причиной является воздействие ионного слоя (ранее называвшегося слоем Кеннели-Хевисаft-да) — верхней ионизированной атмосферы. Наиболее вероятно следующее объяснение возникновения ночного эффекта. В обычно применяемом для Р. диапазоне средних волн (смотрите далее таблицу) актуальной является исключительно поверхностная (распространяющаяся по поверхности земли — иначе прямая) волна; при этом вектор напряженности электрич. поля волны лежит в плоскости большого круга, проходящего через передатчик и приемник; т. о. не существует слагающих поля, перпендикулярных этой плоскости. Вертикально расположенная рамка [вообще замкнутая антенна (смотрите)] дает минимум приема в том случае, если нормаль к ее плоскости направлена на передатчик. Если же при наступлении вечера ионный слой для изучаемого диапазона волн становится способным к отражению или преломлению, то кроме прямого пути распространения появляется еще и косвенный путь. При прохождении волны но этому послед нему возникает вследствие воздействия ионизированных слоев вращение плоскости поляризации излученной волны, и на приемнике появляется составляющая электрич. вектора, направленная перпендикулярно к плоскости большого круга. Вследствие воздействия этой горизонтальной составляющей на рамку нормаль к последней не указывает уже более на передатчик, а дает нек-рое другое направление.
Кроме этой причины появления ошибок при Р., указанной рядом авторов, в том числе Эккер-елеем и Танимура, Никольс и Шеленг приводят в качестве причины вращений плоскости полярхт-зации изменения в магнитном поле земли. При этом оказывается достаточным совершенно незначительных изменений в напряженности земного поля, для того чтобы вызвать сильные вращения. Вращение поляризации вызывают также и вариации электронной концентрации при постоянном поле земли. Если такие вращения протекают по времени быстро, то положения минимума (при пеленгировании и самоориентирова-нии) и зоны (при курсовождении) изменяются так быстро, что их часто невозможно проследить. Наблюдаются случаи, при которых минимум в кратчайшее время обегает полные 360°. По временам минимум исчезает совершенно; это бывает тогда, когда на приемное устройство падает вращающееся поле. Ночные блуждания пеленга делаются заметными на том расстоянии, на к-ром напряженность поля пространственной волны становится сравнимой с напряженностью прямой волны. Величина этого расстояния зависит не только от длины волны, но и гл. обр. от антенны, примененной на передатчйке. Чем сильнее подавляется посылаемое вверх излучение, тем больше расстояние, в котором Р. свободна от ночного эффекта. Опыт показывает, что ночной эффект возникает особенно сильно при тех способах Р., при которых на одной из сторон (передача-прием) применяются замкнутые антенны: последние сильно реагируют на прием горизонтальной поперечной (к плоскости большого круга), составляющей напряженности электрич. ноля. Для исключения ночного эффекта стремятся использовать такие методы, которые не реагируют на поперечные составляющие поля. Наиболее известен из них способ Эйдкока (смотрите Пеленгатор, фигура 12); применение его несколько затрудняется тем, что требуется частая компенсация (балансные конденсаторы и т. д.), и неудобством использования вследствие наличия антенного устройства больших габаритов. В последнее время пытаются устранить влияние ночного эффекта путем полного отделения поверхностной волны от пространственной. Этой цели достигают такими методами: 1) передатчиком излучают серию совсем коротких сигналов (импульсов) т. о., что на приемнике производится разделение сигналов от поверхностных волн (периодически повторяющихся) от сигналов пространственной волны (беспорядочных). В качестве достаточно чувствительного индикатора применяют на приемнике трубку Брауна. 2) С 1935 г. в СШ широко применяется замена на радиомаяках замкнутых антенн попарно совместно включаемыми вертикальными антеннами, т. н. TL (transmission lines), или фидерными антеннами. Что касается приема сигналов радиомаяков, то уже сравнительно давно применяли там же вертикальный провод, приобретающий для самолетов вид стержневой (ок. 1 м) антенны; теперь снова вернулись к типу горизонтальных (например подфюзеляжных антенн). Все указанные причины появления и методы устранения ночного эффекта остаются действительными как для пеленгаторов, так и для радиомаяков.
Вертикальная Р. (для авиации). Находящиеся большей частью в стадии предварительных экспериментов методы вертикальной Р. имеют целью обеспечение «слепой посадки» самолета в условиях невидимости земных ориентиров специально подготовленного аэродрома. Из многочисленных попыток решения задачи вертикальной Р. опишем имеющий наибольшее распространение (все же в опытном порядке) метод г л и с-с а д ы. При этом способе используется направляющий луч, вертикальная характеристика которого представлена на фигуре 8. Если самолет
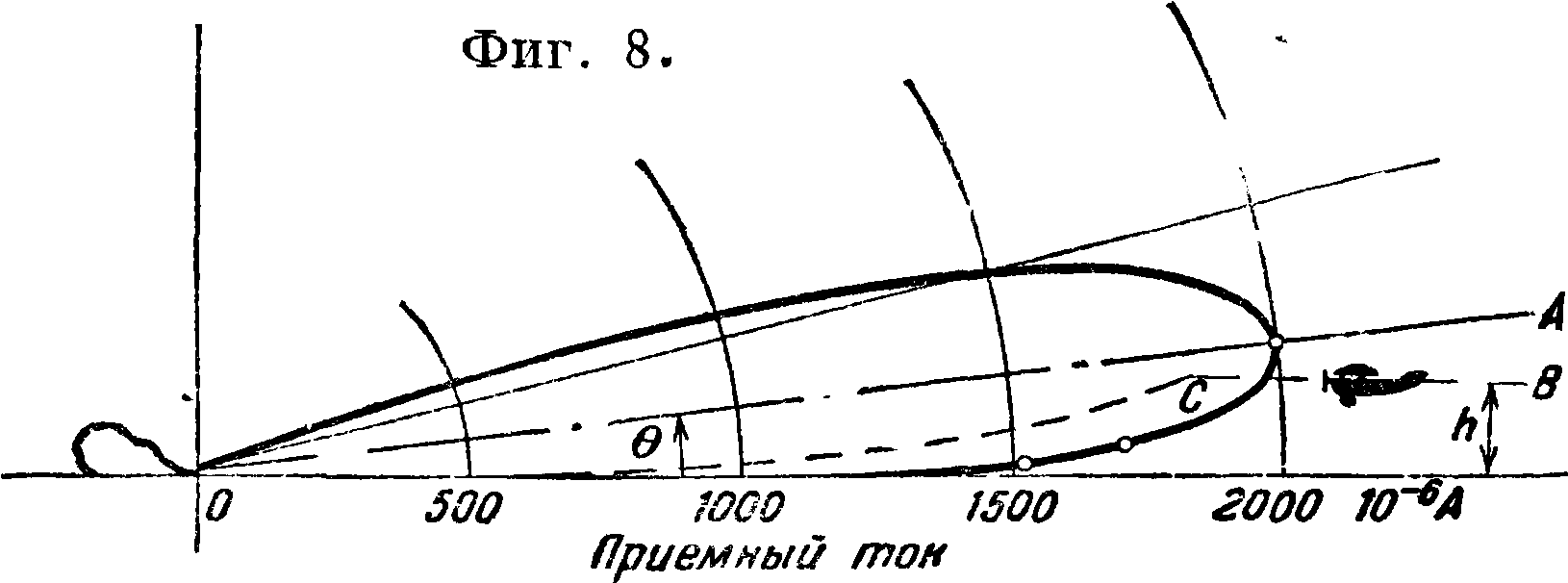
при постоянной высоте полета /г приближается к направляющему лучу по пути ВС, то напряженность поля у самолетного приемника будет возрастать но двум причинам: во-первых, вследствие общего закона распространения (примерно обрат
но пропорционально расстоянию от передатчика) и, во-вторых, благодаря направленной характеристике — в виду приближения к оси О А направляющего луча. Если глиссада (жирная кривая на фигуре 8) выбрана т. о., что возрастание а»
1800 I.
I400
о
Фигура 10.
| и- |
600 1500 2500 3500 4500 5500м
Расстояние напряженности поля у приемника на самолете вследствие приближения к передатчику равно уменьшению той же величины из-за удаления от оси глиссады О А, то самолет планирует по кривой СО, касающейся земли примерно по касательной. Преимуществом такого метода вертикальной Р. является удобство эксплуатации: никаких перестроек на приемнике не требуется, необходимо лишь вести самолет так, чтобы на приборе было постоянное отклонение. Конструкцию глиссады легко получить гр“афически, если известна вертикальная диаграмма направленности
E(d=Const)=f(0).
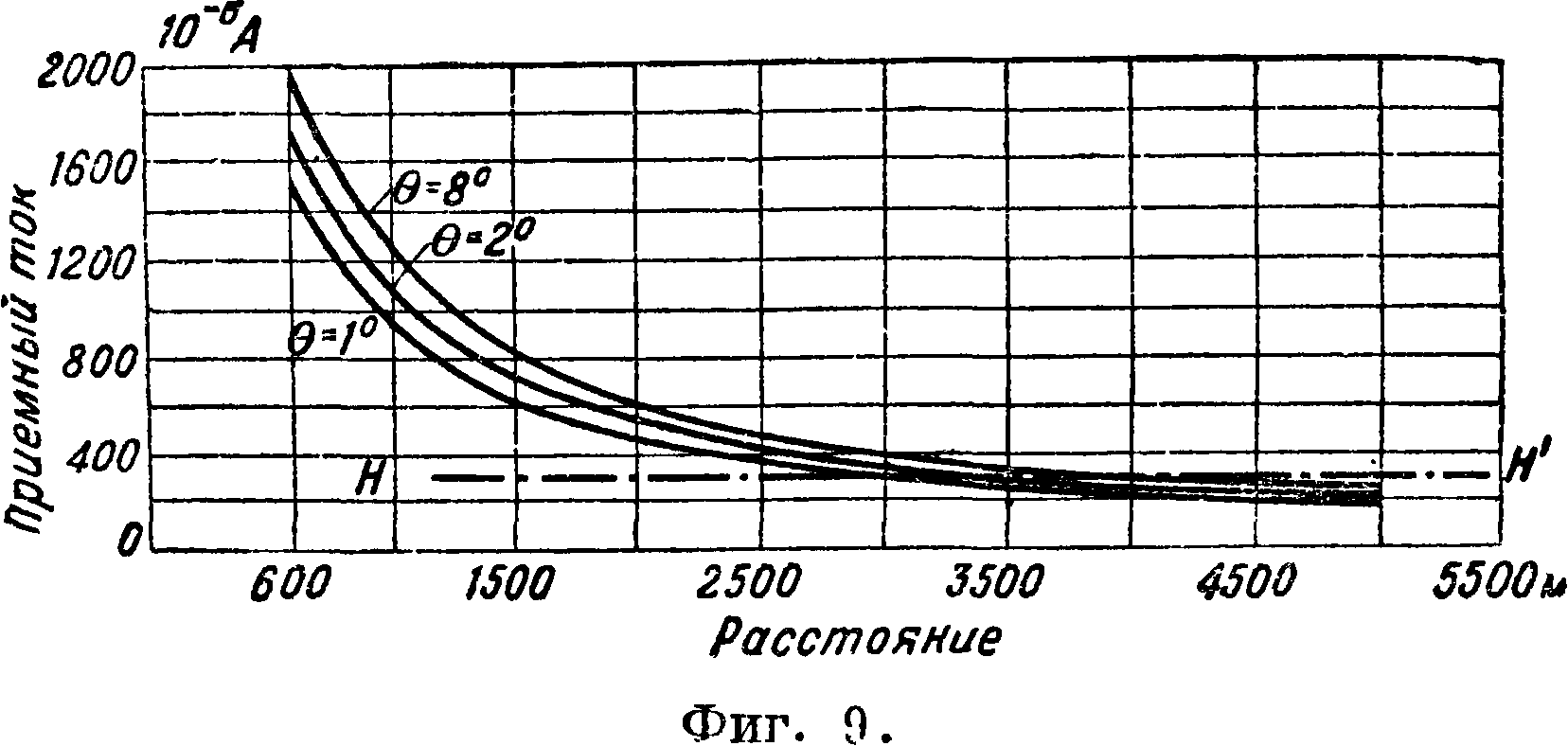
Если измерено Е для определенных значений d (Θ в любых единицах), то можно построить для Θ, как параметра, семейство кривых (фигура 9), указывающих в ф-ии от d (расстояние) соответ-
ствующую напряженность поля Е. Тогда глиссада определяется по ф-ле
h — d tg Θ
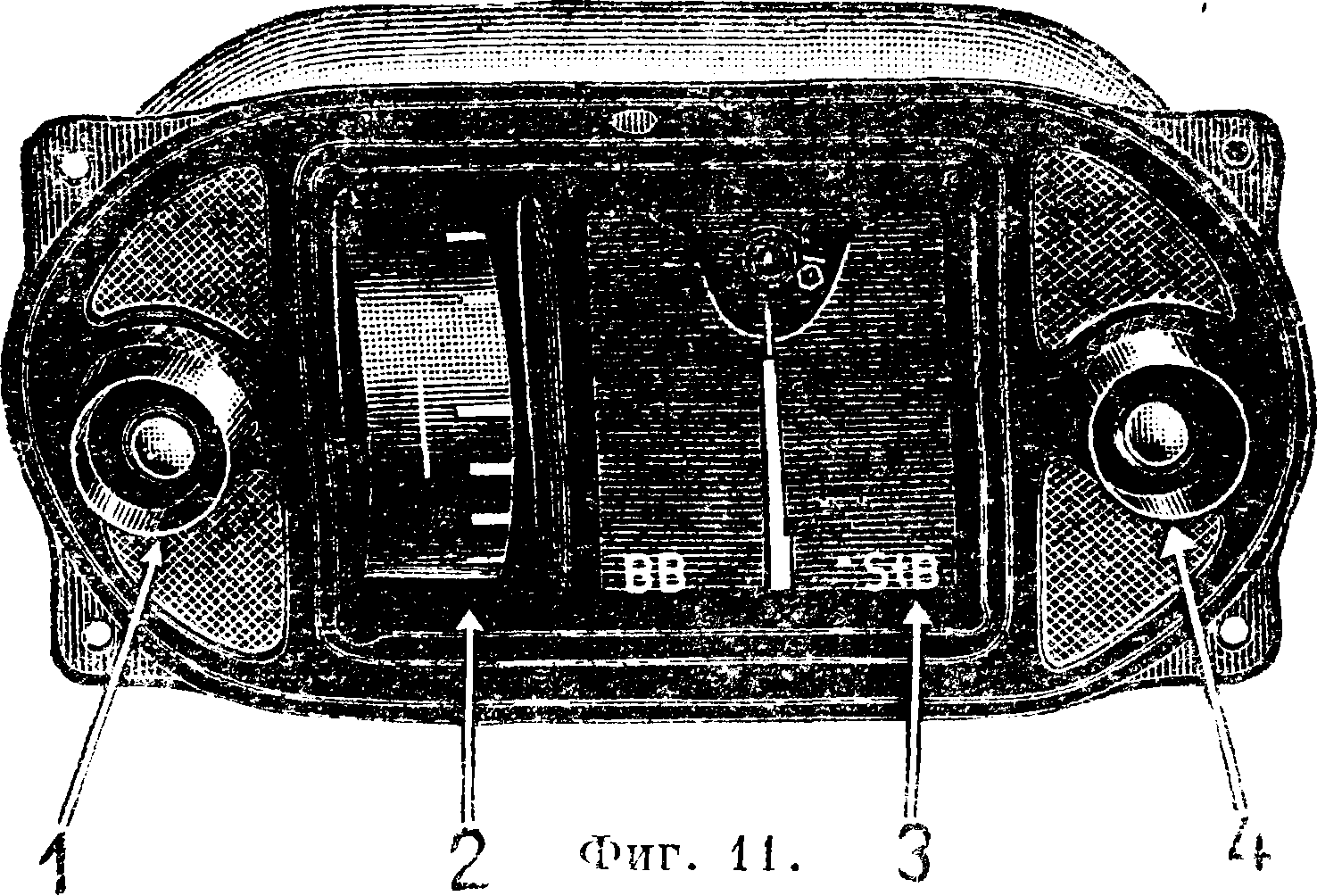
из точек пересечения семейства кривых (фигура 9) горизонталями Н—II, соответствующими тому постоянному показанию прибора, к-рое выбрано для посадки (фигура 10). Полную схему современного оборудования аэродрома различными приборами Р. кроме вертикальной Р. см. Радиомаяк, фигура 14. На фигуре Л представлен индикатор, устанавливаемый на приборной доске пилота для осуществления слепой посадки (1 — лампочка, зажигающаяся при прохождении самолета над внешним маркером; 2 — дистанциометр, грубо показывающий расстояние самолета от аэродрома; 3 — индикатор посадочной дорожки; 4 — лампочка, зажигающаяся при прохождении самолета над внутренним маркером).
Диапазон частот для Р. На двух последних международны^ конференциях (в Мадриде в 1932 г. и в Люцерне в 1933 г.) выработана с участием (ССР следующая таблица диапазонов частот для Р.
| i
/, 1 kHz j ________i |
i
λ, j M i 1 |
j
Для j вссчо j мира, j |
Для
Европы |
Для остальных частей света |
| 285—290
I |
1
l 053—1 >A34 |
- | Авиасвязь | Радио маяки |
| i 290-315
! |
1 034- 952 i
1 |
Радио маяки | Радиомаяки морские | - |
| i 315-320
1 |
952— 938 j
i |
~ | Радиомаяки морские | Авиасвязь |
| 1 ODD-385 | 822- 779
! j |
Радиопелен гация |
L.
Лип Баженов В. и М я ^ о е л о в II., Радиомаяки М., ) 9.36; Кероор Л. п. Кербер Б. О а м о л е г н ы е радионавигационные станции. М, 1936: F a s « Ь е н d е г H., HochtrequenzLechnik in der Luftfahrt, В., 1932;
Fassbender u. К г ii g e г К., Hoehlrequenztechmk, «Die Pliysik in regelmassigen Berichten», Ερζ., 1934, В. 2, Heft i; *E c k e г s ! e y, «Physikalische Berichte», Rrschw., 934, B. 4, p. 1 41; v. d. P о 1. ibid., B. 12, p. 1628: II a r-b icli u.K я iinfimann, ibid., B. 13, υ. 723; Smith Rose, ibid., B. 12, p. 2624; W a 1 s о n-W a t t, Herd a. Beinbridg e-B ell, TIie Cathode Ray Oszillograph in Radio Research, Б. 1933; D iamond, «Physikalische Berichte», Brseliw., В. 14, p. 762: Busignies II., Appareils indicatcurs donnants par lecture directe la direclion d’unc onde, «I/ondc clectr.», P., 1927, t 6; В ij-s i g n i e s H., ITn nouveau radmeompas, ibid., P., 1930, t. 9; Hell R., Direktzeigendns innkentetegraphisches Peilverfabren, ibid., 1929, B. 33. Г“. Баженов