 > Техника, страница 76 > Рассев
> Техника, страница 76 > Рассев
Рассев
Рассев, или собственно плоский Р., служит на мельницах для просевания продуктов перемола с мелющих систем. Плоский Р. имеет преимущество перед простым, или центробежным, буратом (смотрите) в том, что вся площадь его сит полностью покрыта про7дуктом и все время используется и что он м. б. разделен на несколько отдельных про-севательных систем (2—6) с многоэтажным распределением сит в каждом отделении, что дает возможность отсеять в одной машине как крупные продукты (сходы, крупки), так и муку и дунсты. Т. о. каждое отделение может заменить 2—3 бурата, а весь Р.—4—12 бу-ратов. Р. требует меньше двигательной силы и занимает значительно меньшую кубатуру здания. По технологии, особенностям процесса просевания на Р., всплыванию и легкому отделению сходом отрубянистых частей мука может быть получена более чистой и не пробо-истой с более редких №№ сит.
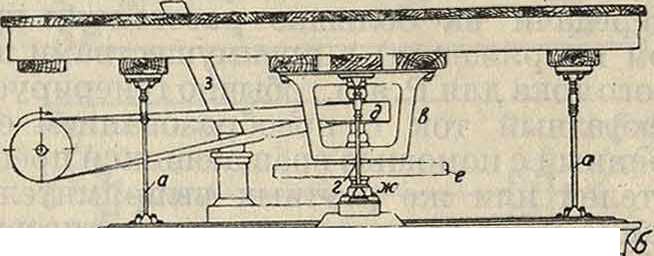
Первый плоский Р. был изобретен более 40 лет тому назад и произвел большой переворот в мельничном деле. Мельницы, оборудованные плоскими Р., назывались рассев н ы м и. Первые Р. сист. Хагенмахера были подвесного типа. Схема движения Р. дана на фигуре 1, где а означают 4 тяги, б—вал и в— кривошип, дающий Р. круговращательное движение. Фигура 2 показывает характер движения Р., при котором все точки описывают круги по диаметру, равные кругу с центром в точке б, описываемому кривошипом в, а грани Р. во всех перемещениях х, х, х", х’" сохраняют параллельность. Собственно изобретатель заменил плоским Р. механич. путем ручное движение сит, применявшееся с времен далекой древности. Фигура 3 дает общий продольный вид Р., где а—4 подвески (тяги) с шаровыми утолщениями на концах и подшипниками с шаровыми вкладышами, укрепленными к коробке Р. и потолочным брусьям;
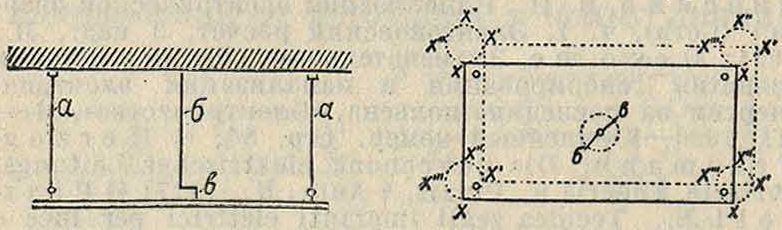
Фигура 1. Фиг."2.
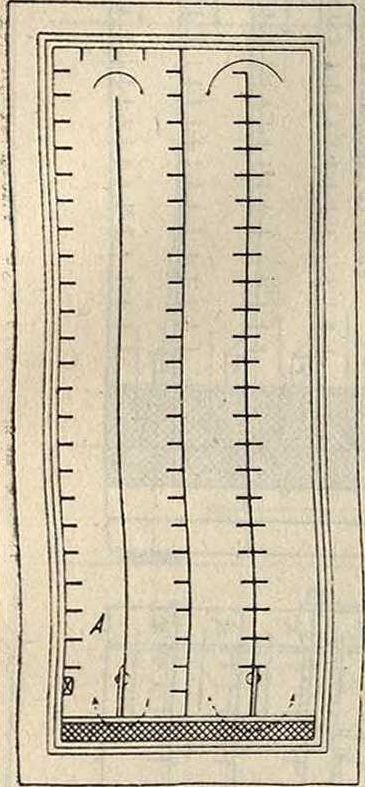
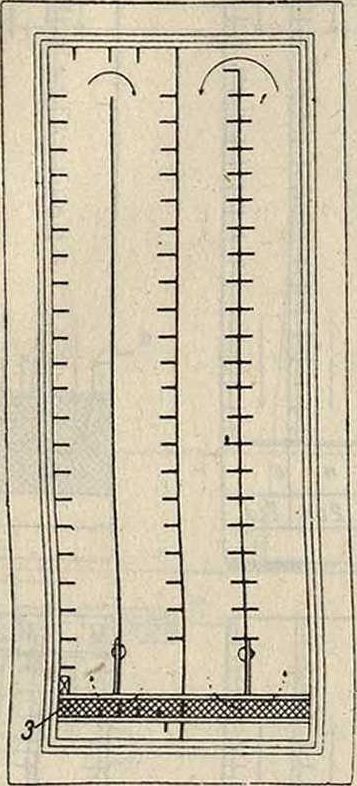
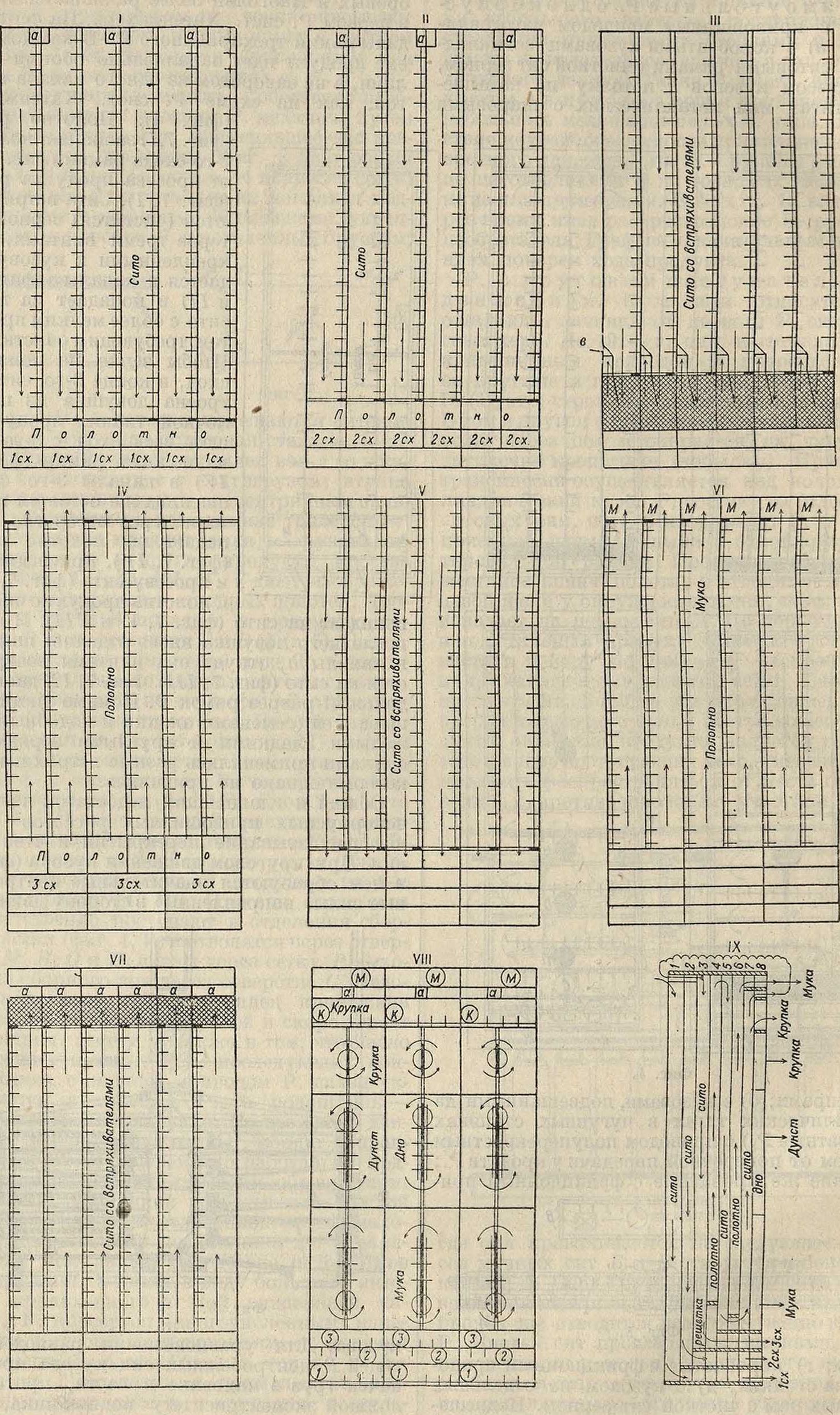
б—короб Р., в котором помещаются ситовые рамки; в—чугунная подвесная станина, в которой в подшипниках укреплен вал г со шкивом д и маховиком е с контргрузом; втулка маховика заканчивается эксцентричным пальцем, работающим в подшипнике траверсы ок; з—подводящая продукт течка, и—рукава, отводящие муку и другие продукты просева из Р. Фигура 4,I, II, III, IV, V дают изображение ситовых рамок и отводных полотен. Продукт по трубе А попадает в приемную коробку Р. и в отверстия Б и В (фигура 5). Далее, в данном случае, при левом ходе Р. и благодаря гребешкам по стенкам ситовых рамок, продукт движется по ситу (фигура 4) в направлении, указанном стрелками. Просев 1-го сита поступает на 2-е сито (фигура 4, II), а сход направляется через сетку 1-го сита в колодцы Е и выводится из Р. через отверстие Ж в нижней рамке (фигура 5). Сход 2-го сита (фигура 4, II) через сетку 3 попадает в колодцы Л и выводится через отверстие К в дне Р. Просев падает на 3-ю сборную рамку (фигура 4, III) и через отверстие JI поступает на 4-ю ситовую рамку (4, IV). Просевы этого сита соответственно поступают в отделения сборной рамки (фигура 4, V) и отводятся через отверстия Μ, Н, О и Я, а сход через сетку Р выходит из сборного дна через отверстие С. Недостаток привода тот, что палец кривошипа срабатывается одной стороной и скоро теряет цилиндрич. форму, а также в том, что масло загрязняет крышку Р. В последующих конструкциях с нижним приводом Р. палец укрепляется в траверсе Р., а подшипник — эксцентрично в маховике. Во все время движения центробежная сила Р. меняет направление, и палец попеременно работает в подшипнике по различным своим образующим. Наоборот, подшипник срабатывается одной стороной, наиболее отдаленной от оси маховика, но вкладыши подшипника легче заменяются, чем палец. Вследствие недостатков конструкции, а также в виду большого интереса, проявленного к этой важнейшей машине, Р. подвергся многочисленным изменениям и усовершенствованиям и получил применение в разнообразных типах. Р. делятся на 2 категории: с прямолинейно-возвратным движением и с круговым поступательным движением.
Р. с прямолинейн о-в озвратным ; движением. Наиболее типичным является ι
Р. Зодера, состоящий из ящика с 5—7 ситами небольшого размера, поддерживаемого стальными пружинными стойками и приводимого в качательное движение от эксцентрикового валика. Такие Р. очень просты и дешевы и в настоящее время применяются на небольших мельницах сел.-хоз. типа. Вследствие неуравновешенности прямолинейно-возвратного движения эти Р. крупных размеров не изготовляются и на товарных мельницах не нашли применения. В 90-х гг. 19 в некоторое время имел распространение Р. русского изобретателя Графова с качательным движением поперек хода продукта.
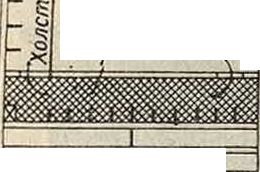
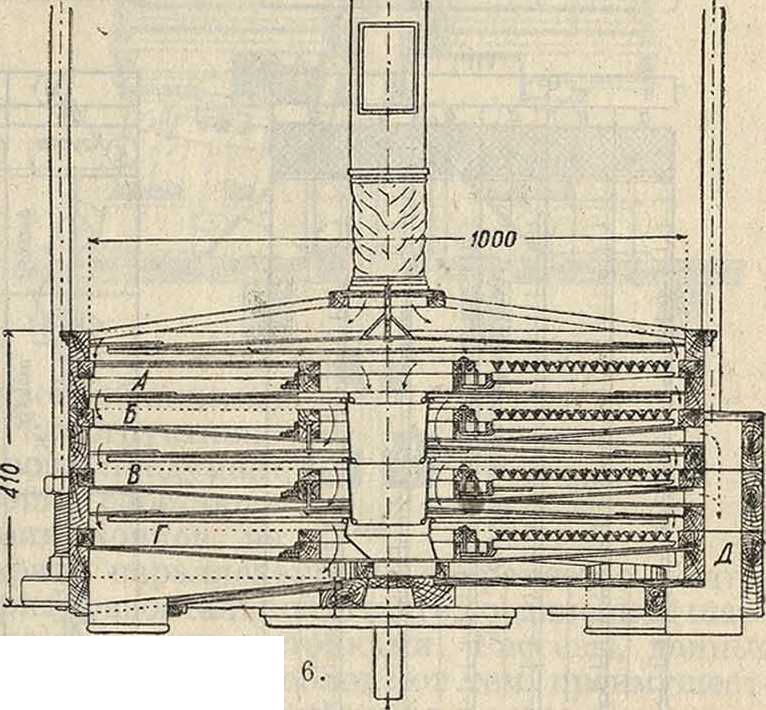
Р. с круговым поступательным движением. К таковым относятся все остальные, начиная от первого Р. сист. Ха-генмахера. До 1910 г. они изготовлялись с кривошипным приводом и подразделялись на круглые и прямоугольные. Круглые Р. (Бунге) строились подвесные и в станине. В том и другом случае веретено маховика проходит через пол и опирается на чугунный двуплечий кронштейн (кобылку). Привод от трансмиссии осуществляется под полом. Цилиндрический кузов Р. состоит из отдельных ситовых рам. Фигура 6 изображает Р. с одной приемной, двумя мучными и одной крупосортировальной рамами. Продукт поступает на жестяное конич. полотно и отводится к кольцевой щели у окружности рамки, через к-рую попадает на первое сито А. По первому ситу и по остальным продукт движется от окруяс-ности к центру по принципу распространения, анадогичномуразливу воды. Текучесть продукта является результатом движения Р., распластывающего кучки поступающего продукта; двюкение продукта является результатом вновь поступающих масс, имеющих возможность распространяться от места поступления к противоположным участкам сита,
и н н frfro
| 1] | Λ щ | 1 | II | II | II II | ίΓ | |||
| а | а. | а | а | а | м | ψ1 | |||
Фигура 3.
где они проваливаются на следующее. Просев мучных сит Б и В отводится к боковому каналу Д. Сход сортировального сита Г отводится к центру и оттуда каналом к краю Р., проход же отводится непосредственно к краю Р. Чистка сит производится щетками, прикрепленными к кольцу из углового железа, свободно лежащему в другом железном кольце, регулируемом болтами, укрепленными в раме сита. Щетки имеют направление под углом к радиусу, что способствует их двилге-нию вокруг опорного кольца.
(
Прямоугольные Р. однокорпусные с кривошипным приводом изготовлялись: а) с коробчатыми кузовами со вкладными ситовыми рамами с чисткой сит зерном, с подвесом кузовов к потолку на Камышевых тягах или металлических с шаровыми
II
i II II I III I I
L ^~v
(ί-н-н-н-н-
=3=
-H4+
9-
c
w -Ж f+
Ψ
πχττ
M-
vv
I i I i i i i i i i i
£
I I I Ш I I I
(ΓI I I Ш I I 1^
^Гг
Фигура 4.
шарнирами;* б) с кузовами, подвешанными на металлических тягах в чугунных станинах {кроватные Р.) с приводом полуперекрестным ремнем от поперечной передачи у кровати Р.; в) такие же кроватные с фрикционным при-
/V V
Фигура 5.
Ж
водом; г) коробчатые с фрикционным приводом на стойках; д) с кузовом из отдельных ситовых рам с чисткой сит зерном. Подвешены на металлич. шаровых тягах к чугунной •станине (русские Р. системы Хлопина). Ход продукта в Р. сист. Эрлангера и завода До
V-
Т
- ^ О -X
бровых и Набгольц более рациональный, чем в первом Р. сист. Хагенмахера. На чертежах даны рамки трехприемного Р. В каждом приеме продукт идет параллельно обоими каналами, а не заворотом из одного канала в другой, как на схеме Р. сист. Хагенмахера (фигура 4). Полотно рамки (фигура 7,1) защищает колодцы 2-го схода рамки (фигура 7, II) от просева продукта рамки (фигура 7, I). Сита встряхиваются (чистятся) зерном, которое тремя винтами, прикрепленными к кузову, подается в каналы а (фигура 7, I и II) и попадает на третье сито с более мелким продуктом, требующим очистки сит. Чтобы зерно не попало в сход, в конце 3-го сита устроена ловушка из проволочной ткани, пропускающая весь сход с 3-го сита на полотно рамки (фигура 7, IV) в каналы 3-го схода, пшеница же остается на сите и через отверстия в попадает на полотно рамки (фигура 7, IV), присоединяясь к просеву сита (фигура 7, III). С полотна продукт с чисткой попадает на сито (фигура 7, V и VII). В конце последнего ловушка вновь отделяет пшеницу в каналы а, откуда она винтами возвращается на сито (фигура 7, III). Фигура 7, IX дает продольный разрез рамок Р. Помимо чистки сит пшеницей (семенами акации и подобными тяжелыми гладкими и круглыми зернами) и щетками применялись разные встряхиватели, которые однако не привились.
Общий и главнейший недостаток всех однокорпусных кривошипных рассевов—сильное расшатывание перекрытий и стен здания. При круговом движении кузова (фигура 8) в нем образуются значительные центробежные силы, направленные в сторону движения
ί
Фиг. кузова. Для уравновешения равнодействующей Р центробежных сил кузова предназначен груз в маховике в части, противоположной эксцентриситету подшипника, ведущего кузов Р. Без маховика с грузом рассев не мог бы работать, но центробежная сила P груза не может полностью уравновесить
Фигура 7.
центробежную силу кузова, т. к. эти две силы находятся в разных плоскостях. Центробежная сила кузова приложена на середине высоты его, а центробежная сила груза—в середине пальца кривошипа, находящегося в траверсе под дном Р. В результате даже при полном равенстве указанных сил они образуют пару сил, действующую попеременно на растяжение одних тяг Р2 и сжатие других
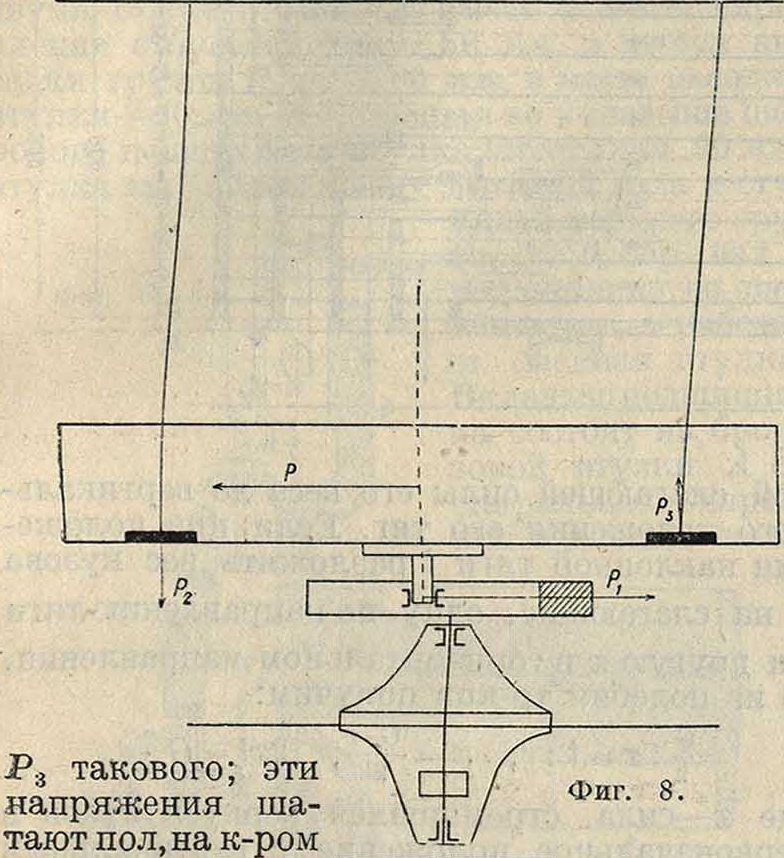
установлен Р. Но в виду меняющейся нагрузки Р. равенства центробежных сил также не достигается, и сумма неравенства сил от группы Р. составляет значительную величину, действующую попеременно в разные стороны в плоскости перекрытия, передаваясь на стены мельничного здания, расшатывая их.
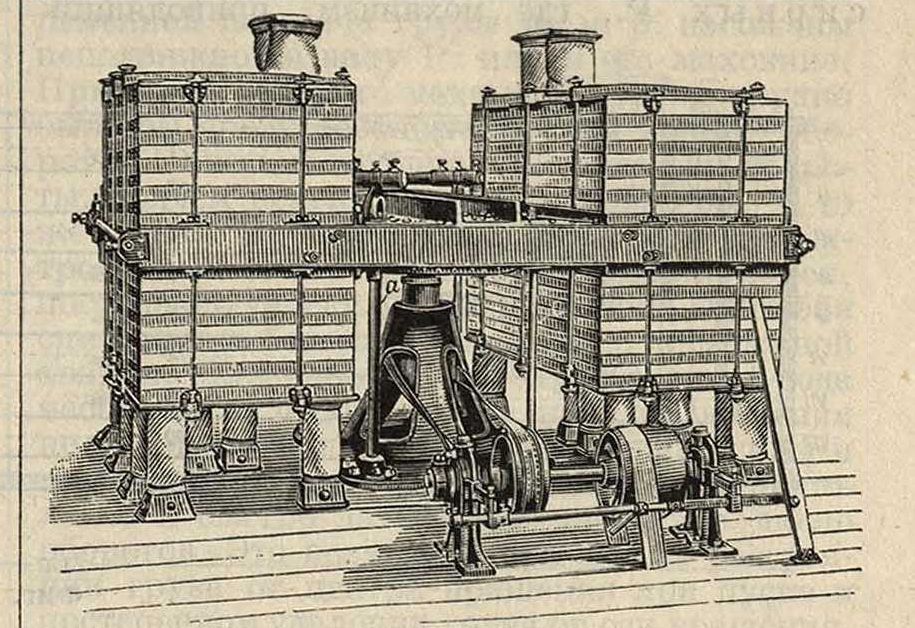
Главнейший недостаток однокорпусныхР.— несовпадение плоскостей центробежных сил кузова и груза маховика—был устранен в двухкорпусных Р. Типы этих Р.: подвешенные к потолку на металлич. подвесках или камышах (Р. сист. Зекка), подвешенные в станине на камышах или на металлич. тягах
Фигура 9.
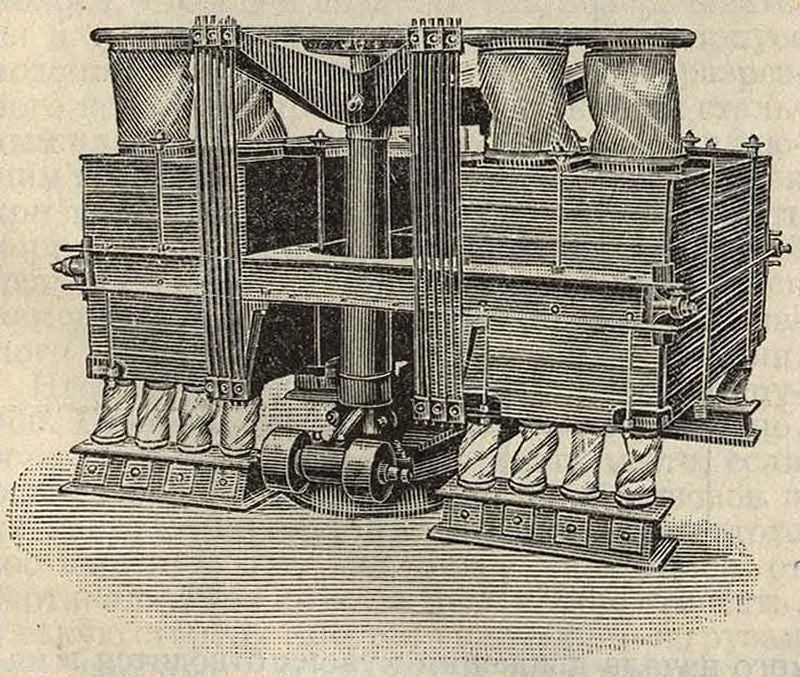
(фигура 9—англ, завода Робинсона), установленные на стойках или на камышах и наконец на стойках а с шариковыми соединениями вверху и внизу, получающими устойчивость благодаря штанге, соединенной шарнирами с двумя диагон&тьно расположенными стойками и препятствующей им и остальным стойкам уклониться от параллельного направления во время хода Р. (фигура 10 и 11). Во всех этих Р. кузова—рамочные; чистка сит обычно щетками. Как видно из приведет
Фигура 10.
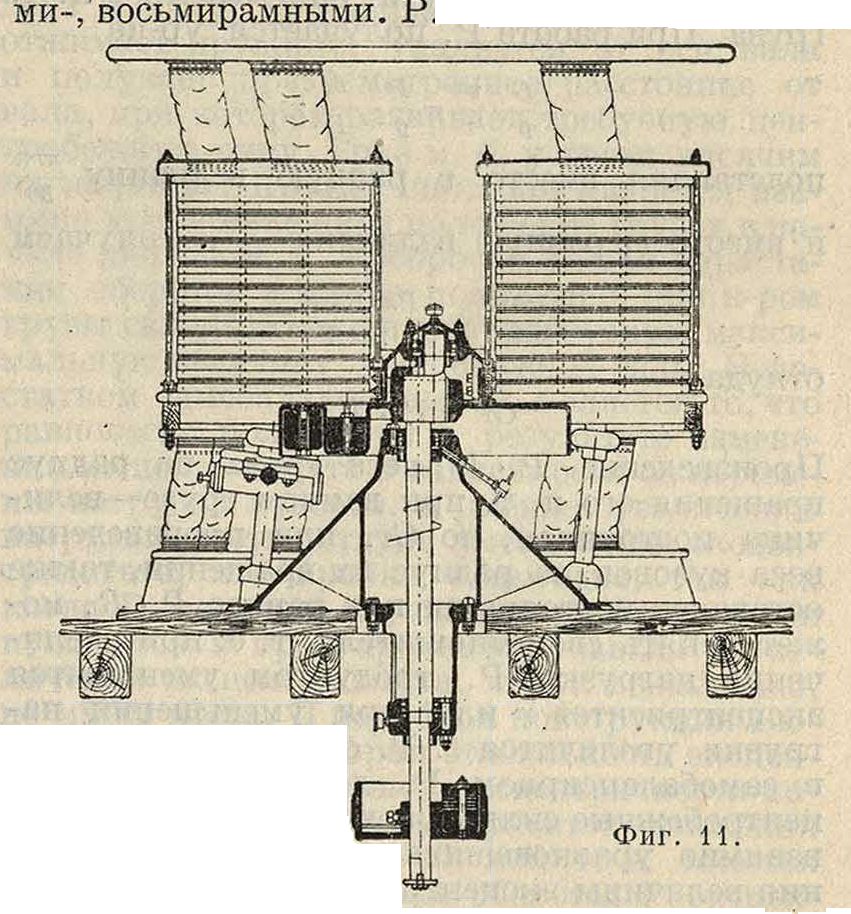
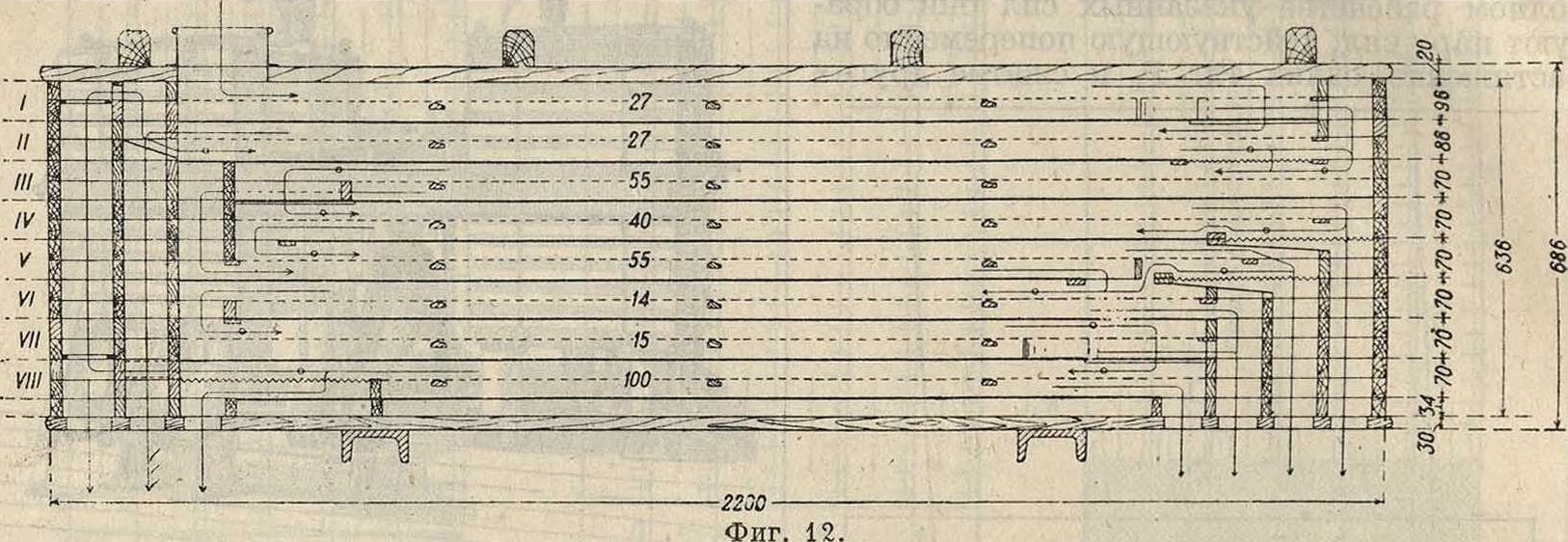
ных фигур, центры, маховиков расположены в плоскости, проходящей через середину кузовов, т. о. центробежные силы кузовов и грузов находятся в одной плоскости им. б. уравновешены. Переходным является двухкорпусный рамочный рассев (чистка пшеницей, схема дана на фигуре 12) на трех стойках с маховиком под кузовами (фигура 11). Здесь нет совпадения плоскостей ц. т., но подшипник расположен выше линии дна кузовов и расстояние между плоскостями центров пальца и кузовов невелико, однако это обстоятельство, не позволяет делать Р. более, чем се-.— весьма компактный
(кузов асбл ижены) и конструктивно хорошо продуман.
Стойки работают с обоих концов на шарах, параллельность сохраняется благодаря горизонтальной штанге, соединенной шарнирами с двумя стойками. Рассевы, данные на фигуре 10 и 11, обладают тем преимуществом, что не могут сбиться с хода благодаря штангам, соединенным со стойками шарнирами достаточной длины. Явление сбивания схода у прочих Р. вызывается иногда повышенным трением пальца в подшипнике, почему происходит закручивание кузова. Описанные двухкорпусные Р. все же являются криво
шипными, и полной уравновешенности между центробежными силами кузовов и грузов получить не удается.
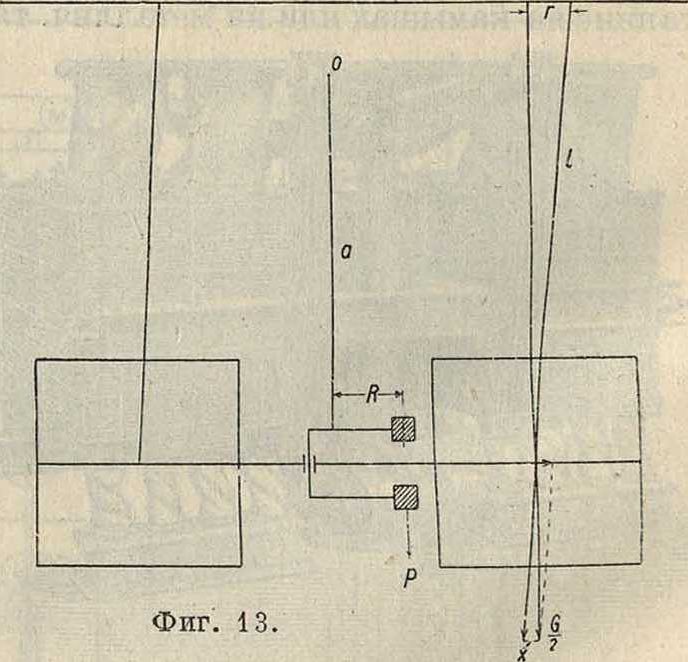
Вопрос почти полного отсутствия шатания зданий решен конструкцией самобалан-сирных Р., где механизм, приводящий клонены влево. Если расцепить веретено от Р., то оно под влиянием момента Р-R должно повернуться налево и принять наклонное положение, при котором продолжение силы Р пройдет через точку о, Р. же должен вернуться направо под давлением горизонталь-
в движение рассев, движется вместе с кузовами и не имеет жесткой связи с потолком или полом здания или не имеет вовсе никакой связи с ним. Рассмотрим силы, действующие на такой Р. Центробежная сила кузовов равна --у, где G— вес кузовов, д—ускорение силы тяжести, г—радиус, кругов, описываемых всеми точками Р., и v—окружная их скорость. Центробежная сила уравновешивающего груза равна ~-Щ-, где Р—вес груза, д—ускорение силы тяжести, R—расстояние ц. т. груза от оси вращения и г>,— окружная скорость пути, описываемого ц. т. груза. При работе Р."получается ур-ие
G у_2_Р в?. д г ~ д R ’
лт подставляя вместо v равную величину —-
nRn
и вместо v1 равную величину-^-, получаем
Ол2Г2П2 _ PnZRZn2 30 »г “ 302 д ’
откуда
Gy=Р R.
Произведение Р R веса груза на радиус вращения его ц. т. при данном грузе—величина постоянная, но Gr, или произведение веса кузовов на радиус их вращения, также оставаясь постоянным как равное Р R, может менять свои множители, то есть при увеличении нагрузки Р. продуктом уменьшится эксцентриситет г или при уменьшении нагрузки увеличится г. Т. обр. мы видим, что в самобалансирном Р. действующие в нем центробежные силы кузовов и груза все время взаимно уравновешиваются за счет изменения величины эксцентриситета, не передавая никаких сотрясений на потолок или пол здания. Самобалансирные механизмы имеются двух родов—с жестким и мягким приводом. К первому роду относится самобалансирный Р. системы Амме (фигура 13). Веретено а подвешено в точке о в кронштейне, где оно опирается на шариковое упорное кольцо, направляется шариковым подшипником и имеет некоторую свободу уклонения от вертикали. При отвесном положении веретена а вследствие эксцентриситета г кузовй и тяги I от тай слагающей силы его веса до вертикального положения его тяг. Если при положении наклонной тяги I разложить вес кузова G
— на слагающие, одну по направлению тяги
I и другую х в горизонтальном направлении, то из подобия тр-ков получим:
γ: х=I: г; х=2x1=G · г,
где х—сила, стремящаяся вернуть кузовов первоначальное положение с вертикальным положением тяг; 2х—сила, действующая на оба кузова или на весь Р., а 2x1=М—момент, восстанавливающий Р. в отвесное положение и этот M=2xl=Gr, но т. к. в наклонном положении соответственно эксцентриситету г)Р. удерживается благодаря грузу веретена,"то Gr=P-R, то есть получается то же самое равенство, к-рое было выведено для Р. в движении; отсюда ясно, что такой Р. при приводе его в движение не меняет положения веретена от момента покоя до нарастания его оборотов от нуля до полного их числа и с са
мого начала движения кузова отводится в направлении, противоположном грузам. Равновесие сохраняется как в покое, так и при нарастании центробежных сил. Р. описывает круги, равные радиусу эксцентриситета г при вертикальном веретене, если соблюдается равенство Gr=PR, то есть если вес кузовов G во столько раз больше груза Р, во сколько ра
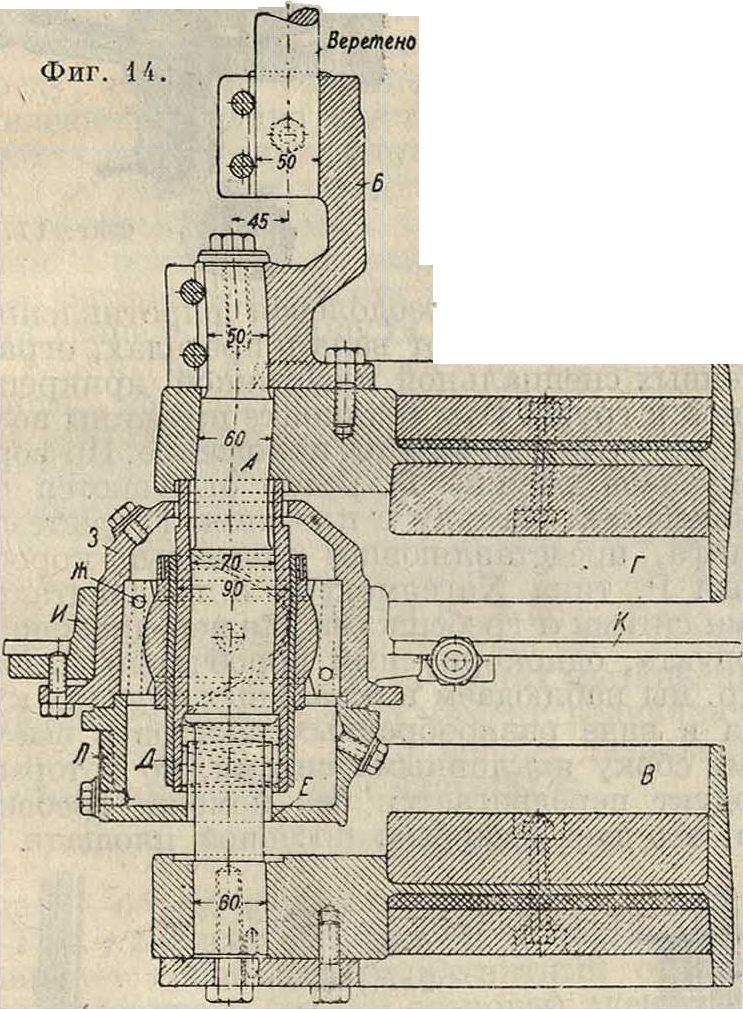
диус R грузов больше радиуса г эксцентриситета. На фигуре 14 показана конструкция механизма Р. системы Амме. Веретено Р. толщиною внизу в 50 миллиметров скрепляется с валом А при помощи бугеля В. Расстояние между осями веретена и вала А равно 45 миллиметров, равно г эксцентриситета, с которым работает Р. Бугель в местах прикрепления веретена и вала имеет разрезные втулки, стягиваемые каждая двумя болтами. Вал А имеет в месте скрепления с бугелем диам. 50 миллиметров, в местах насадки грузов В и Г—60 миллиметров, в месте насадки втулки—70 миллиметров. Работающая во вкладыше шарового подшипника втулка имеет диам. 90 миллиметров, втулка эта зажата между заточкой вала и ступицей верхнего груза. Так. обр. вал в Фигура и. ··. м подшипнике не снашивается, а работает сменная втулка. Вкладыш подшипника состоит из бронзовой втулки А со спиральной нарезкой в нижней части для подачи масла из камеры, ограниченной трубкой Е. Втулка закреплена в бронзовом яблоке, имеющем возможность поворачиваться в чугунной обойме Ж, зажатой в корпусе подшипника 3 при помощи чугунного разрезного кольца M, прикрепленного к двум стальным пластинам К толщиною 10 миллиметров, составляющим траверсу Р. Разрезное кольцо стягивается при помощи стального болта. Л—нижняя часть корпуса подшипника, представляющая собой масляную ванну. Р. сист. Амме изготовляются как увеличенного типа—подвесные, так и малого типа—в станинах, для мелких мельниц.
Необходимо отметить способ проверки грузов. Веретено будет совершенно вертикально, если г=45 миллиметров, а это может иметь место, если размер грузов соответствует весу кузовов и их нагрузке продуктами просева. Если этого соответствия нет, вал будет уклоняться от вертикали. При помощи мела можно отметить, в какую сторону имеется уклонение—к грузам или наоборот. Если груза недостаточно, то по ур-ию Gr=PR видно, что при заданном весе кузовов G при постоянном R. недостаточный вес грузаРдолжен соответствовать уменьшенному г. Уменьшенный же г может получиться при уклоне вала, а следовательно и веретена, в сторону грузов. Итак, мел на стороне грузов показывает, что надо добавить грузы—явление обратное, чем при выверке кривошипных Р.: там метка на маховике к грузу показывает излишек грузов. Характерным для самобалансов с мягкой ременной передачей является Р. системы Бюлера. При ременной передаче грузы не м. б. насажены неподвижно на валу Р. или в его маховике. При пуске такового механизма ремню трудно было бы. сразу сообщить грузам полные обороты: Р. весьма медленно развивал бы обороты, причем ремень сильно буксовал бы. В то же время Р., выводимый нарастающей центробежной силой груза из состояния покоя, постепенно увлекался бы последним, описывая спираль все большего радиуса до неизбежной аварии. Для работы самобаланса этого рода необходимо, чтобы груз в начале движения не развивал большой центробежной силы и не препятствовал ремшо иметь возможность легко и быстро дать валу требуемое число оборотов. Это возможно при малом расстоянии груза от центра вращения при пуске и постепенном удалении груза от оси вращения. При этом действие самобаланса следующее: нарастающая центробежная сила груза ведет за собою кузов, описывающий спираль весьма малого диаметра в пределах заданного эксцентриситета Р.; но вследствие постепенного нарастания центробежной силы и легкого привода Р. вращение вала и груза опережает движение кузова, механизм перебрасывается с грузом в сторону, противоположную полученному кузовом эксцентриситету, и Р. работает по ур-ию Gr=PR. Переменное расстояние груза от оси вращения достигается разными способами; между грузом и ободом ма-’ ховика располагают пружину, прижимающую груз к валу; при нарастании оборотов груз отжимает пружину, удаляется от оси вала и получает- предусмотренное расстояние от вала, при котором развивает требуемую центробежную силу. Груз м. б, устроен висячим на шарнире. Другим способом является взаимно уравновешенное положение грузов в начале движения и переброска их при нарастании оборотов в новое положение, при к-ром грузы складываются и дают требуемую максимальную величину центробежной силы. Недостатком самобалансирных Р. является то, что равновесие получается в результате изменения эксцентриситета в зависимости от перемены нагрузки кузовов, а именно: увеличению нагрузки соответствует уменьшение эксцентриситета, что крайне невыгодно, так как когда Р. получает случайную перегрузку, он нуждается в предупреждение завала в увеличении эксцентриситета, что, к сожалению, не имеет места. В подобной конструкции Бюлера имеется некоторая стабильность эксцентриситета; при наличной эксцентричности маховика в 57 миллиметров эксцентриситет движения кузовов рассчитан в 45 миллиметров, то есть имеется остающаяся при полных оборотах Р. эксцентричность в (57 - 45) 12 миллиметров, причем пружины рассчитаны так, что грузы, преодолевая их напряжение, полностью не сходятся. При этих условиях перегрузка Р., уменьшая эксцентриситет ниже 45 миллиметров, увеличивает остающийся эксцентриситет, который становится больше 12 миллиметров, и дает стимул дальнейшему сближению грузов, влияющему на восстановление эксцентриситета в 45 миллиметров. Привод Бюлера имеет еще то преимущество, что, укладываясь в сравнительно нешироком маховике,
он устанавливается в плоскости металлич. рамы между верхней и нижней половинами кузовов. При этом увеличивается высота кузовов, но они зато сближаются на расстояние 300—400 миллиметров вместо обычного 900 миллиметров, и Р. дает выигрыш по ширине в 500 миллиметров. Двухкорпусные рамочные Р. изготовляют также с вкладными ситовыми рамками. Кроме применения самобалансирных механизмов к двухкорпусным Р. встречаются также однокорпусные коробчатые (с вставными рамками) само-балансы с приводом под кузовом.
Американские Р. обычно изгото-
Фигура 15.
цом жесткой передачи может служить Р. сист. Аллиса (фигура 15). Как у Амме, на валу насажены два неподвижных груза, но вертикальное веретено соединено с валом не твердо с кривошипом в 45 миллиметров, а промежуточным валиком с двумя шарнирами Гука. Несбива-ние вала при пуске достигается кривошипом на нижнем конце вала, работающим в направляющем подшипнике, удерживаемом в требуемом положении четырьмя пружинами (фигура 16). Пружины при пуске Р. удерживают его вал от сбивания, и таковой работает как кривошипный; при достижении полных оборотов и равновесного движения подшипник работает вхолостую без изменения напря
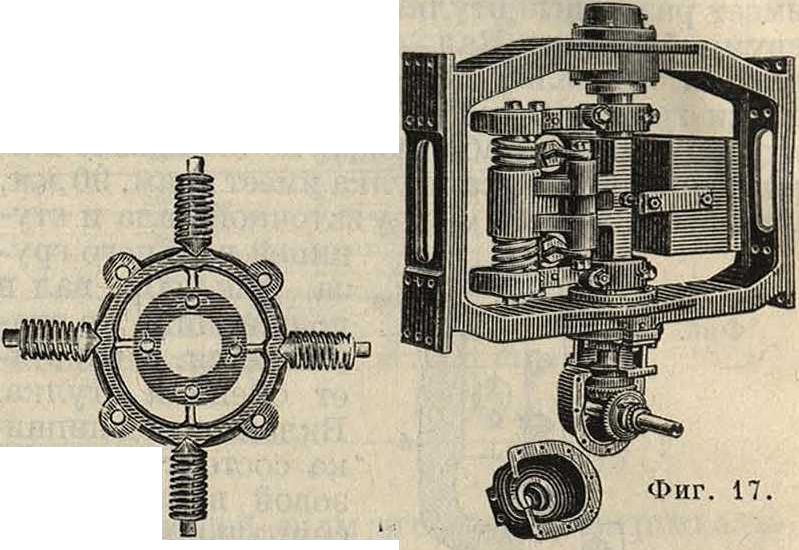
жения пружин. В конструктивном отношении этот самобаланс уступает Р. сист. Амме. Как тип мягкой передачи укажем на самобаланс Вольфа (фигура 17). На валу вращения наглухо прикреплены 2 рычага, на конце которых укреплена ось вращения груза. На оси укреплены 2 спиральные пружины, сопротивляющиеся удалению груза от вала вращения механизма. В начальном положении ц. т. груза находится близко от вала.
Под влиянием центро
Фигура 16.
бежной силы груз, преодолевая сопротивление пружин, удаляется от вала в пределах, ограниченных специальной пластинкой, прикрепленной к грузу. При остановке пружины возвращают груз в начальное положение. По форме кузовов америк. Р. резко отличаются от европейских. Наряду с плоскими Р. системы Вольфа, представляющим сдвоенный коробчатый Р. типа Хагенмахера с горизонтальными ситами и гребешками для передвижения продукта, однокорпусным коробчатым Аллис и др. мы наблюдаем в остальных случаях кузова в виде разнообразных шкафов с выемными сбоку наклонными ситами, по которым продукт передвигается без помощи гребешков, что дает выигрыш посевной площади и
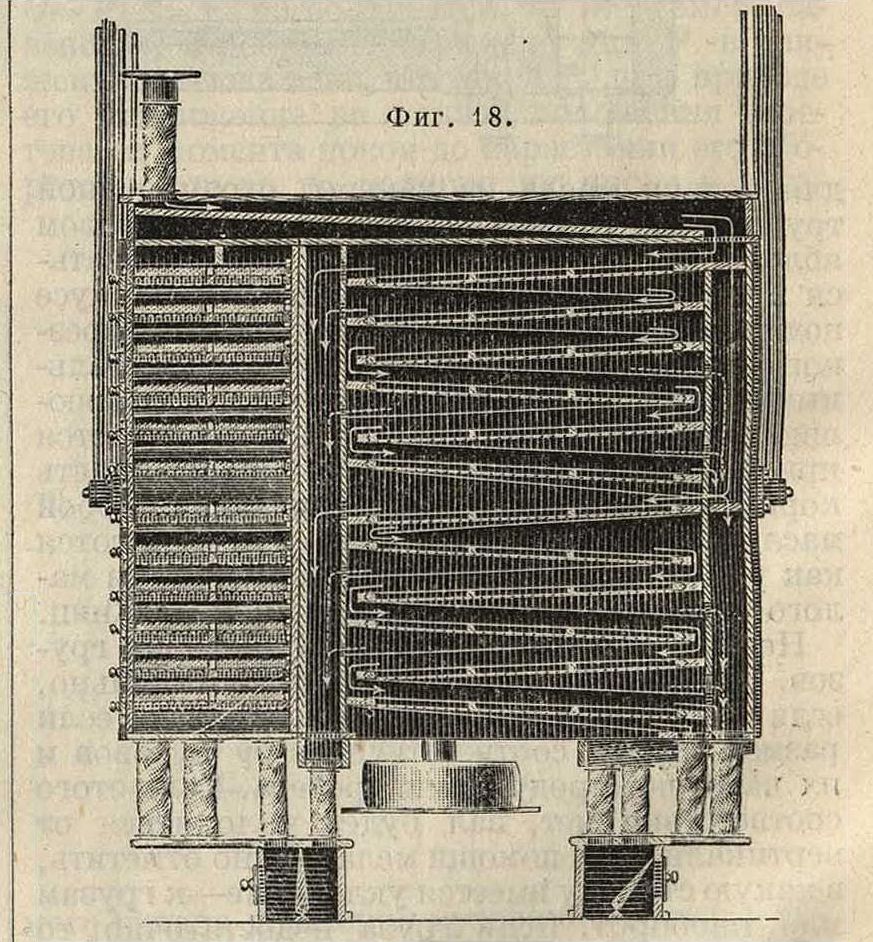
Silaiat
.удобную выемку сит, но в то^ же время увеличенную высоту Р., большой вес шкафов и менее надежное уплотнение между рамками и стенками шкафа (ф.иг. 18). Наклон сит должен влиять на неравномерный просев в течение каждого оборота Р., но практически это положение подлежит еще проверке.
Самобалансные Р. с электрич. приводом до настоящего времени на практике не нашли применения, так как электрич. привод не дает преимуществ: заменяется ремень, но вводится дороже стоящий мотор, к-рый самобалансирно-го механизма заменить не может, а в лучшем случае заменяет часть груза. В последнее время Р. с электрич. приводом снова стали в центре внимания в связи с стремлением перехода на индивидуальные электрич. приводы всех машин с упразднением трансмиссий.
Лит.: Зворыкин К. А., Курс по мукомольному производству, Харьков, 1894; К о з ь м и н П. А., Мукомольно-крупяное производство, 4 изд., М., 1926; В е-б е р К., Мукомольное дело, СПБ, 1908. Л. Розенштейн.