 > Техника, страница 77 > Реостат
> Техника, страница 77 > Реостат
Реостат
Реостат, прибор, включаемый в цепь электрнч. тока для понижения напряжения или изменения силы тока; основной частью Р. является омич, сопротивление, величину которого можно изменять (регулировать). Омич, сопротивление в Р. служит для поглощения электрич. энергии и превращения ее в тепловую по закону Джоуля.По своему назначению реостаты подразделяются на следующие основные группы: 1) пусковые Р., служащие для ограничения силы тока за время пуска в ход двигателей, 2) регулирующие Р.— для регулирования силы тока или падения напряжения в той цепи электрич. тока, в к-рую они включены. К этой группе Р. относятся: Р. для регулировки скорости вращения электродвигателей; Р. для регулировки напряжения генераторов путем соответствующих изменений силы тока возбуждения; Р. для дуговых ламп и ламп накаливания, назначение которых состоит в поддержании или постоянства напряжения на зажимах источников света или постоянства силы тока для увеличения устойчивости горения ламп с вольтовой дугой, а также в регулировке силы света в определенных пределах; нагрузочные Р. и целый ряд других специальных Р. Все эти Р. в свою очередь разделяются на два основных типа: металлические Р. и жидкостные. В Р. первого типа регулируемое омич, сопротивление выполняется из металла или специальных металлич. сплавов, в Р. второго типа омич, сопротивлением служит жидкость (раствор соды в воде или чистая вода) с погруженными в нее металлич. электродами. Основное различие Р. этих двух типов помимо материала сопротивлений заключается в том, что при помощи жидкостных Р. можно достигать вполне плавного изменения сопротивления, тогда как в металлич. Р. сопротивление возможно изменять лишь ступенями б. или м. величины в зависимости от числа контактов Р.
1. Угтро ство Р. 1. Устройство металлических Р. Основные части металлич. Р. нормального типа: а) элементы сопротивления, б) внутренние соединительные проводники и зажимы для присоединения внешних проводов, в) переключатель ступеней, г) кожух и остов, д) автоматич. предохра нительные приспособления, защищающие и Р. и электрич. машину от чрезмерных перегрузок. Основные требования к материалам для изготовления сопротивлений следующие: высокая <°η.ι., способность выдерживать длительное время нагрев до 250—300°, высокое уд. сопротивление, способность выдерживать механич. сотрясения при рабочей t° и невысокая стоимость. Зти материалы разбиваются на группы в зависимости от уд. сопротивления. Основные группы следующие: а) сплавы со средним уд. сопротивлением ρ =0,5 Ω миллиметров2/м:
Фигура 1.
Константин, реотан, манганин, круппин и другие; б) сплавы со средним уд. сопротивлением д— 1,0 Ω миллиметров2/м> хром-никель, хром-ни-кель-железо, железо-никель; в) сплавы со средним уд. сопротивлением ρ=0,3Ω миллиметров2/м: нейзильбер, мельхиор;
г) наиболее часто применяемый материал— никелин,для которого ρ=0,4 Ω миллиметров21м. Все эти материалы применяют или в виде круглой проволоки или в виде лент. Кроме то- j го для изготовления L.v~ сопротивлений пусковых Р. допускается оцинкованная или луженая железная проволока диаметром не меньше 0,5 л«; вследствие большого £°-ного коэф-та применение ее в регулирующих Р. не допускается. Наконец для изготовления сопротивлений, предназначенных для больших сил тока, в тех ступенях Р., где не требуется постоянства сопротивления“ применяется чугун, уд. сопротивление которого ρ^0,8 Ωμμ*/μ·, £°-ный коэф. его также велик. Элементы сопротивления Р. изготовляются различных видов в зависимости от материала, формы его и назначения и рода охлаждения Р. В стационарных установках они могут изготовляться в виде спиралей из проволоки или ленты, закрепленных на металлич. рамах; в установках же, где возможны сотрясения и толчки, спирали наматываются на цилиндры из изолирующего теплостойкого материала. Еще лучше для не-
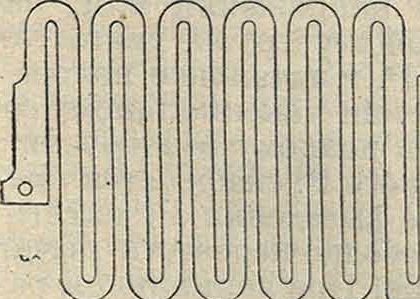
О л стационарных установок натяги-;1 вать круглый провод или ленту на железные рамы, на внешних гранях которых укреплены рифель-ные фарфоровые полуцилиндры. Иногда для экономии места и большей стойкости в отношении сотрясений круглую проволоку малых диаметров наматывают в спираль, а последнюю в свою очередь навивают на рифленый фарфоровый цилиндр. На фигуре 1—3 изображены различные виды элементов сопротивления, выполненные из круглой проволоки и ленты. Для увеличения постоянной времени нагрева элементов сопротивления последние выполняют иногда в виде дисковых катушек или пакетных сопротивлений. В первом случае сложенные вместе тонкая металлич. лента и
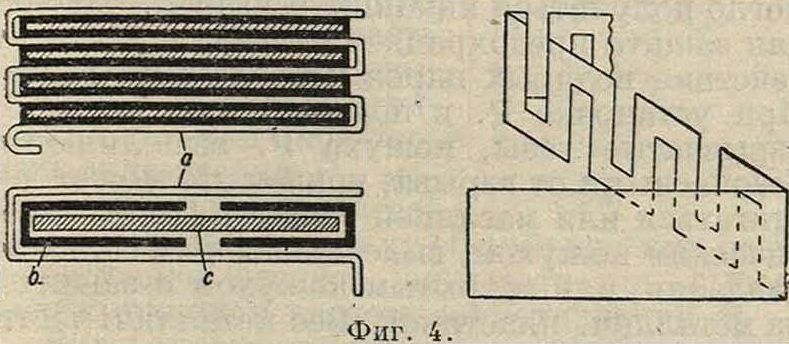
Фиг. более толстая железная лента с прокладками между ними в виде тонких полосок асбеста наматываются в виде плоской спирали. Во втором случае металлич. лента складывается так, как это показано на фигуре 4 (а—проводник, b—
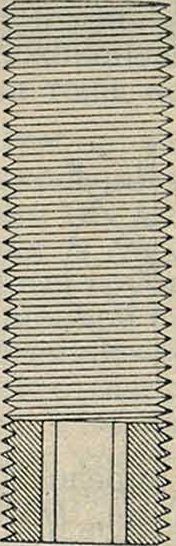
Фигура з. слюда, с—железная пластина). В обоих случаях для увеличения сопротивления в металлич. ленте вырезаются пазы, что дает возможность кроме тсго’изменять сопротивление ленты и для различных сопротивлений пользоваться лентой одной и той же ширины и толщины. Чугунные сопротивления, применяемые для Р. с воздушным охлаждением, составляются из ряда отдельных секций зигзого
образной формы (фигура 5) с ушками для закрепления этих секций на стержнях, изолированных слюдой, а между секциями прокладываются или металлич. или изолирующие шайбы, соединяющие их последовательно или параллельно. Допускаемые нагрузки для проволочных или ленточных сопротивлений выражаются в А/ммг и в зависимости от конструкции элемента сопротивления, способов охлаждения, размеров и удельного сопротивления применяемого материала колеблются при продолжительной нагрузке
_ от Здо 31 А/мм2,
причем для мень-шихсеченийберется большая плотность тока; для чугунных же сопро-о! тивлений допус-— каемые нагрузки обычно выражаются посредством мощности, приходящейся на единицу всей внешней поверхности секции. Для чугунных сопротивлений, охлаждаемых воздухом, эти нагрузки составляют в среднем 35 W/дм2 при продолжительной нагрузке и 470 W().w2npn кратковременной нагрузке. При допускаемом повышении на 200° температуры круглых проволок из материала с удельным сопротивлением д= 0,5 Ω миллиметров2/м, допускаемая плотность тока для такой проволоки, выполненной в виде спиралей или натянутой на раму, при достаточном охлаждении воздухом
может быть приближенно подсчитана по эмпирической формуле
"" J»= -ητ= А/мм“, η У d
где d—диаметр проволоки в миллиметров, а β—коэфи-циент (для продолжительн. нагрузки βά= 3,5, для прерывистой продолжительной нагрузки
βα=βά V Ч~—> и h—периоды нагрузки и
ία
паузы; для сопротивлений с песочным или масляным охлаждением /30=I/20 =15,6).
Для спиралей, навитых на фарфоровые цилиндры. значения плотности тока м. б. несколько выше или ниже определяемых по приведенным ф-лам в зависимости от мощности, приходящейся на единицу поверхности цилиндра и принимаемой равной при продолжительной нагрузке и воздушном охлаждении ~40 W/дм2. В качестве внутренних соединений отдельных секций Р. между собою или с контактами переключателя ступеней применяется круглая или полосовая медь (голая или с изоляцией). Голая медь применяется в тех случаях, когда пространство между отдельными секциями Р. достаточно велико, чтобы можно было не опасаться замыканий; в противном случае применяют асбестовую, реже—хлопчатобумажную, изоляцию. Для круглых проводов пользуются также изоляцией в виде фарфоровых или стеклянных бус. Круглые провода диаметром свыше 8 миллиметров не применяют, а в случае надобности пользуются двумя или более параллельными ветвями. Соединительные провода в случае чугунных сопротивлений прикрепляются болтами, а в случае проволочных или ленточных—при помощи специальных зажимов и пайки. Допускаемые плотности тока при продолжительной нагрузке: 13—3,2 А/мм1 для круглых проводов диам. 1—8 миллиметров, 3,8—1,8 А/мм“ для полосовой меди с поперечным сечением 60— 480 лш2, причем в обоих случаях бблыние значения плотности тока соответствуют меньшим поперечным сечениям проводников. Присоединение Р. к цепи тока производится при помощи выводов в виде сквозных болтов с газовой нарезкой, укрепленных на коммутаторной или контактной доске Р., причем все выводы должны иметь соответствующие обозначения. В зависимости от характера проводки (провода уложены в изоляционных стальных или газовых трубках и т. д.) применяются и соответствующие типы выводов. Материалом для болтов служат: для больших сил тока— медь, для меньших—латунь. Плотности тока в болтах допускаются при продолжительной нагрузке 5—30 А /мм2 для болтов диаметром от 4 до 20 миллиметров.
Переключатели ступеней служат для изменения числа ступеней Р., включенных в цепь, обслуживаемую Р.; основные части переключателя—подвижной контакт и ряд неподвижных контактов, соединенных электрически с отдельными ступенями Р. Главнейшие виды переключателей ступеней: плоские, барабанные, вальковые (контроллерного типа) и контакторные. Плоский переключатель ступеней состоит из ряда неподвижных медных или латунных с накладками из красной меди контактов, укрепленных на мраморной или шиферной доске толщиною 10—20 миллиметров и расположенных или прямолинейно или по дуге окружности, по которым перемещается подвиж-
ной контакт. Форма контактов для прямолинейно расположенных по дуге окружности— круглая для небольших сил тока (до ~45 А) и трапецевидная для сил тока свыше 45 А. Плотность тока в контактах при продолжительной нагрузке принимается в 0,4 А/лш2 для круглых контактов диам. 8—12 миллиметров и порядка 0,2 А/лш2 для трапецевидных контактов. Кроме рабочих неподвижных контактов в пусковых Р. имеется еще один холостой контакт из изолирующего материала (фарфор, фибра), дающий возможность размыкать цепь тока. Подвижной контакт для малых пусковых Р. выполняется из сплошного куска латуни, перемещаемого при помощи рукоятки с пружиной, прижимающей его к неподвижным контактам; обычно же он выполняется в виде щетки, набранной из отдельных латунных полос, наклоненных к плоскости неподвижных контактов под углом в 30° (для увеличения площади соприкосновения контактов). Плотность тока в слоистых подвижных контактах различной ширины в среднем принимается ок. 0,9 А/лш2, для сплошных подвижных контактов около
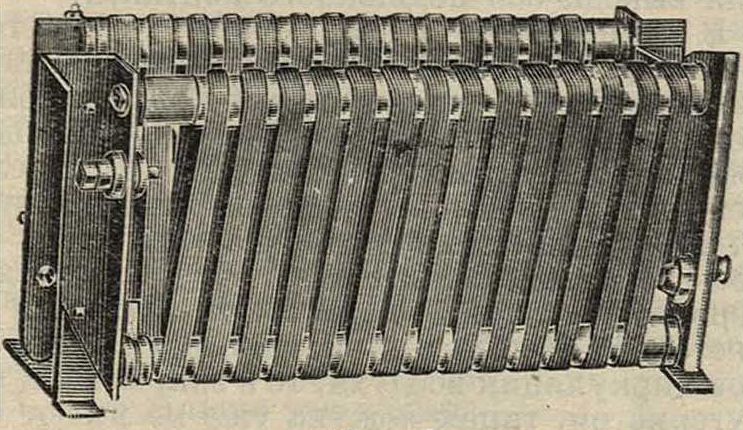
O, 1 А /мм1. Удельное нажатие контакта выбирается порядка 0,5 килограмм/см2. Подвод тока к подвижному контакту производится при помощи специальной щетки, скользящей по токопроводящему кольцу, расположенному концент-рично с контактным рядом; подвод тока через ось подвижного контакта в настоящее время не допускается. Обычный тип плоского переключателя ступеней показан на фигуре 6, где изображен пусковой Р. обычного типа. Барабанный переключатель ступеней по внешнему своемувиду напоминает коллектор электрической машины. Неподвижные контакты его [образуют цилиндр, по поверхности которого перемещается подвижной контакт. В случае тяжелых условий работы Р., то есть при частых пусках в ход двигателей (наир, пуско-регули-рующие Р. для трамвайных и крановых электродвигателей), наблюдается быстрый износ контактов Р., и в этих случаях предпочтительнее применять вальковые переключатели ступеней контроллерного типа (смотрите Контроллер). При еще более тяжелых условиях работы (наир, в установках горных предприятий, заводских и портовых кранах и т, д.) еще лучше применять контакторные переключатели ступеней (смотрите Контактор), обеспечивающие меньший износ контактов и представляющие большие удобства для осуществления схем авто-матич. пуска в ход двигателей. Для уменьшения обгорания контактов в момент разрыва тока переключатели ступеней снабжаются специальными магнитными искрогасителями. Остов Р., служащий для закрепления на нем отдельных деталей Р., в зависимости от конструкции элементов сопротивления, размеров и способа охлаждения, имеет различное конструктивное оформление и выполняется из чугуна или углового и полосового железа, причем мраморная или шиферная доска переключателя ступеней не должна нести никаких скрепляющих функций. Для предохранения
P. от загрязнения, от внешних повреждений и от соприкосновения обслуживающего пер сонала с токоведущими частями Р. как правило закрыт кожухом и переключатель ступеней нередко снабжен крышкой, на к-рон указываются направления вращения рукоятки для пуска или регулировки, с отверстием для вывода оси подвижного контакта.
В зависимости от назначения Р. существуют следующие способы защиты, различающиеся между собою по устройству крышек кожухов и вводов, а именно: открытый, защищенный, закрытый, полу герметический, с масляной защитой и безопасный от а. Кожуха Р. приведенных типов различаются менаду собою степенью защищенности Р., то есть если для первых двух типов кожуха выполняются из листового железа с отверстиями для свободной циркуляции воздуха, то в закрытых и по-лугерметич. типах кожуха уже не имеют отверстий. В Р. с масляной защитой кожуха выполняются из сплошного листового железа и имеют внизу отверстие для возможности спуска масла при чистке Р. и специальное устройство для определения уровня масла. Все элементы сопротивления должны лежать на 2— 3 сантиметров ниже уровня масла, если же и контакты переключателя ступеней находятся под маслом, то они должен быть погружены настолько глубоко, чтобы при выключении самой большой рабочей мощности на поверхности масла не могло получиться никаких вспышек. Масляная защита предохраняет металлич. части от действия водяных паров и различных газов. При установке Р. в помещениях, где м. б. газы, кожуха Р. выполняются безопасными от а, причем это может достигаться или масляной защитой, или герметическим кожухом, выдерживающим большие давления, или закрытым кожухом с защитой из металлич. пластинок. Все металлич. части остова и кожуха, доступные прикосновению, должен быть надежно соединены электрически между собою и иметь общий зажим для соединения с землей. Зажимы выполняются из латуни и диаметр болтов их для малых Р. должен быть не меньше 6 миллиметров, для больших—не меньше 12 миллиметров. На доске переключателя ступеней пусковых Р. нередко устанавливаются и автоматич. приспособления, защищающие установку от повреждений и представляющие собою обыкновенные электромагнитные реле. Назначение их состоит в том, чтобы при спадании или полном исчезновении напряжения или, наоборот, при чрезмерной перегрузке двигателя возвратить рукоятку Р. в начальное положение, соответствующее или максимальному сопротивлению цепи или полному выключению тока. Рукоятка пускового Р. снабжается пружиной, которая по мере выведения Р. натягивается и способна свободно перевести рычаг в начальное положение. При нормальной работе рукоятка Р. при выведенном Р. удерживается в этом положении специальной собачкой или ленточным тормозом, в случае же перегрузки или исчезновения напряжения реле отпускают собачку, и рукоятка возвращается в исходное положение. В качестве таких реле применяют одно—шунтовое, другое—сериес-ное; непосредственно на собачку действует лишь одно шунтовое. В этом случае под действием перегрузки сериесное реле замыкает накоротко шунтовое, отпускающее собачку. При исчезновении напряжения шунтовое реле непосредственно отпускает собачку. В асинхронных двигателях для включения приме-
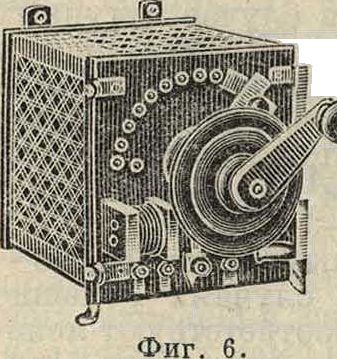
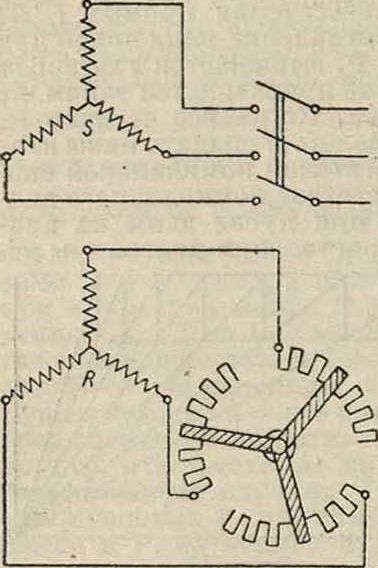
Фиг. няют электромагнит, удерживающий рычаг Р. и приключаемый через дополнительное сопротивление непосредственно к сети рабочего напряжения. У высоковольтных двигателей для питания электромагнита применяют или понижающие трансформаторы или приключают их к цепи ротора, где напряжение низкое; вследствие низкой частоты здесь приходится пользоваться трехфазным электромагнитом (фигура 7, Р−ротор), сила притяжения которого не зависит от частоты. Для предохранения двигателя от перегрузки в последнем случае применяют и максимальный электромагнит, вводимый в цепь статора также вследствие низкой частоты ротора. При равномерной нагрузке всех фаз достаточно включать электромагнит в одну из цепей, подводящих ток к статору. На переключателе ступеней. Р., изображенного на фигуре 6, виден сериесный электромагнит, удерживающий рукоятку Р. в крайнем положении. Вся электрич.энергия, поглошаемая Р. при работе, превращается в тепловую, причем часть ее отдается в окружающее пространство посредством различных видов теплоотдачи, другая часть затрачивается на повышение t° самого Р. Применяя тот или иной способ охлаждения Р., можно установить желаемое соотношение между обеими частями, и это естественно следует учитывать при выборе конструкции и расчете сопротивлений Р.
Виды охлаждения металлич. Р. бывают следующие: а) воздушное охлаждение, б) масляное охлаждение с естественным отводом тепла и водяным охлаждением масла, в) песочное охлаждение. Воздушное охлаждение применяется для Р. и пусковых и регулирующих. В этом случае конструкция Р. должна быть такова, чтобы элементы сопротивления могли свободно обтекаться воздухом, для чего в кожухе Р. делаются отверстия и элементы сопротивления располагаются достаточно далеко друг от друга, чтобы не нарушать циркуляции воздуха. В тех случаях, когда естественного обмена холодного и нагретого воздуха недостаточно, прибегают к искусственному охлаждению при помощи вентиляторов или, для усиления тяги воздуха, выполняют кожуха Р. из сплошного листового железа в виде трубы. Повышение ί° нагретого воздуха в месте его выхода из Р. не должно превышать 175°, а повышение f самого кожуха в наиболее нагретом месте не должен быть выше 125°. Масляное охлаждение применяется для Р., подвергающихся кратковременным нагрузкам, так как в этих случаях при воздушном охлаждении теплоотдача в окружающую среду не успевает проявить себя и Р. получаются громоздкими. Р. с масляным охлаждением, имея гораздо большую теплоемкость, оказываются для такого вида нагрузки более компактными, чем Р. с воздушным охлаждением, рассчитанные на ту же мощность. Объем масла и система охлаждения выбираются с таким расчетом, чтобы повышение 1° масла в наиболее нагретом его месте (приблизительно на 2/з высоты уровня масла) не превышало 80°. Недостаток масляных Р.: период охлаждения их очень велик и в больших пусковых Р. достигает 8ч.и более, что позволяет производить пуск всего 1—3 раза в день. Чтобы избежать этого, в больших Р. применяется искусственное охлаждение масла, для чего нагретое масло по трубам поступает в специальный охладитель в видеполого цилиндра, внутри которого по трубам протекает охлаждающая вода. При помощи таких охладителей можно весьма значительно сократить период охлаждения масляных реостатов. Реостаты с пссочпым схда-ждеиием применяются только для редкого пуска в ход двигателей. В этом случае все пространство, занимаемое элементами сопротивления, засыпается чистым кварцевымпеском, к-рый весьма негигроскопичен. Поверхность контактов должен быть защищена от возмож-ности попадания на нее отдельных песчинок. Максимальное повышение ί° песка не должно превышать 150°. Достоинства Р. с песочным охлаждением: безопасность в пожарном отношении, дешевизна и простота обслуживания, т. к. песок почти никогда не приходится заменять. Эти Р. широко применяются в подвижных установках, где применение масляных Р. невозможно; кроме того они чрезвычайно удобны в с.-х. и других установках, где Р. с воздушным охлаждением могут быстро заса-риваться легко воспламеняющимися отбросами производства.
Управление Р. производится от руки (непосредственно или посредством приводов и штанг) или м. б. применено электрическое управление, когда Р. вводится и выводится при помощи специальной электромоторной установки. Электрич. управление может быть различных видов: а) процесс м. б. начат и произвольно остановлен от руки; б) процесс м. б. начат от руки и проведен автоматически; в) процесс начинается и проходит полностью автоматически. Электрич. управление применяется также в тех случаях, когда ручное управление слишком громоздко или требует больших усилий для перемещения подвижного контакта, а также в тех случаях, когда пуск в ход должен производиться по строго определенному закону.
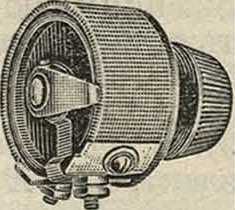
Из группы металлич. Р. следует отметить получившие широкое распространение в радиотехнике и составляющие почти неотъемлемую принадлежность любой ламповой радиоустановки Р. со скользящим контактом, так называемым Р. накала (электронных ламп). Его назначение — вго-дить добавочное сопротивление в цепь нити таких ламп и т. о. регулировать эмиссию электронов из накаленной нити. Одна из конструкций таких Р. дана на фигуре 8.
2. Устройство жидкостных Р. В жидкостных Р., которые гл. обр. употребляются в качестве пусковых или нагрузочных, особенно в случае больших мощностей, когда металлич. Р. оказываются чрезвычайно громоздкими, роль элементов сопротивления и переключателя ступеней играет жидкость с погруженными в нее металлич. электродами. Постоянный ток, проходящий через жидкость, производит электролиз раствора и образует большие количества гремучего газа, к-рый легко может взорваться от искр, полу
Фигура 8.
чающихся при размыкании тока; кроме того электродные пластины быстро разъедаются постоянным током и в Р. получаются большие илистые отложения. Поэтому жидкостные Р. в мощных установках постоянного тока не применяются. При переменном же токе жидкостные Р. работают достаточно надежно и устойчиво. По характеру устройства и роду работы современные жидкостные Р. можно подразделить на следующие основные группы: а) Р. с неподвижным уровнем жидкости и перемещающимися электродами; б) Р. с неподвижными электродами и перемещающимся уровнем жидкости и в) горячие водяные Р/В тех случаях, когда в жидкостных Р. электролитом служит раствор какой-либо соли (обычно соды) в воде, максимальное повышение t° раствора не должно превышать 80—90°, так как кипение жидкости способствует образованию отложений, нарушающих нормальную работу Р., и изменению концентрации раствора, что в свою очередь сильно сказывается на сопротивлении Р. Кроме того удельная проводимость электролита сильно изменяется от t° (при 100° она приблизительно в 2,7 раза больше, чем при 20°). Поэтому такие Р. на большую мощность необходимо снабжать особыми охладителями, по трубам которых пропускается охлаждающая раствор вода. Для больших мощностей гораздо более экономичными оказываются горячие водяные Р., в которых электролитом служит чистая вода, нагреваемая до t°KUи т. о. энергия, поглощаемая Р., отводится в виде пара. Такие Р. более громоздки вследствие большого уд. сопротивления чистой воды (проводимость 10%-ного раствора соды в воде приблизительно в 84 раза больше, чем простой воды) и необходимости вследствие этого увеличивать поверхность электродов, но зато расход воды в горячих водяных Р. в 7—15 раз меньше (по сравнению с обычными реостатами).
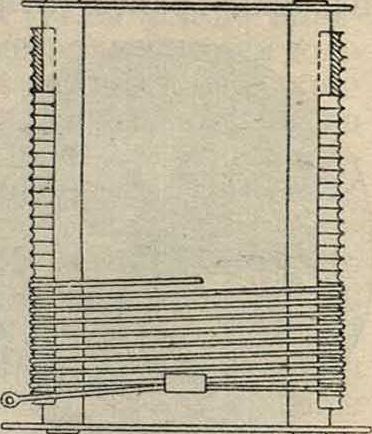
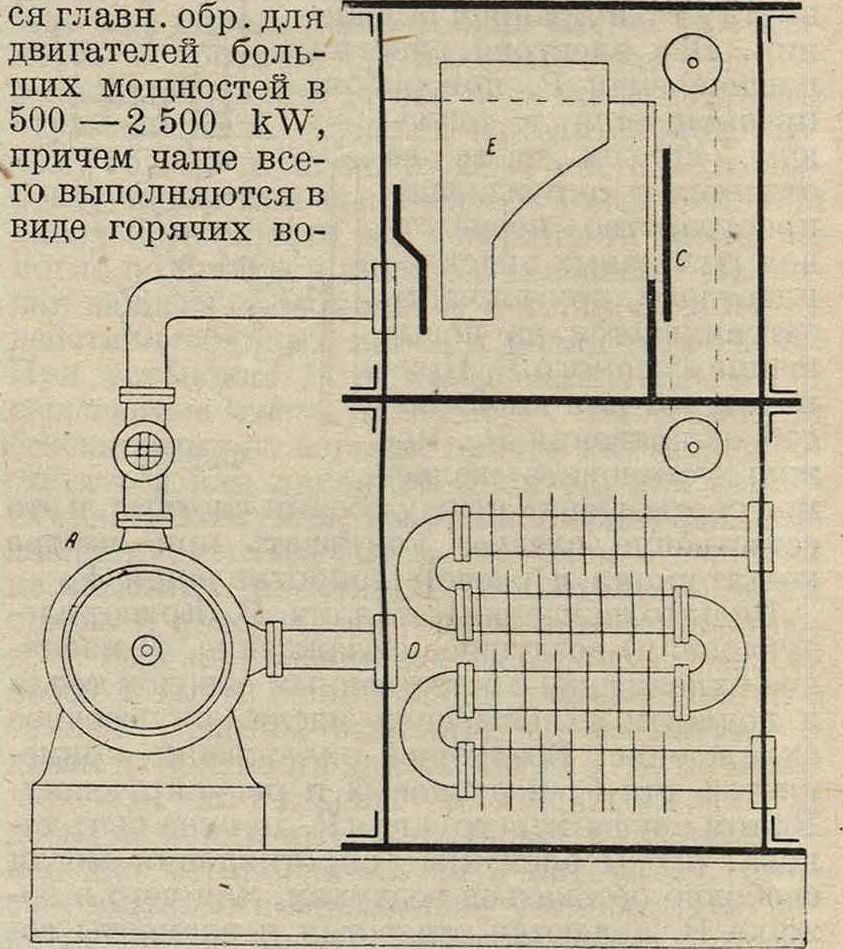
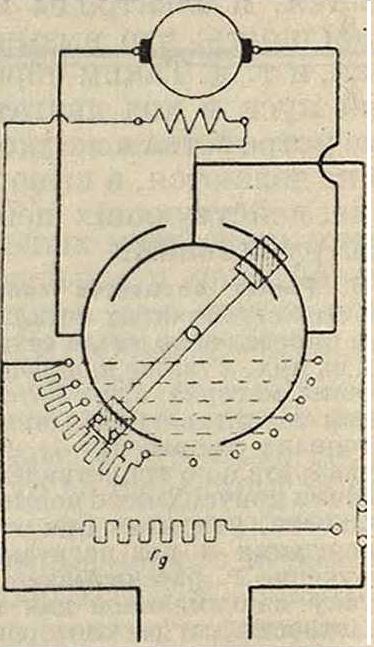
Жидкостные Р. представляют собою сосуд (один — в случае постоянного, однофазного или трехфазного тока при включении треугольником или три·—в случае трехфазного тока при соединении звездой). При подвижных электродах и неподвижном уровне жидкости электроды укреплены на общем хорошо изолированном валу, к-рый вращают при помощи рукоятки к червячной передаче, обладающей, какизвестно, свойствомсамоторможения и дающей вследствие этого возможность остановить электроды в любом положении. В Р. с перемещающимся уровнем жидкости сосуд выполняется в виде двух баков (фигура 9). В верхнем баке укреплены неподвижные электроды Е, и из нижнего в верхний нагнетается насосом А (с постоянной скоростью) вода, причем уровень воды регулируется специальной заслонкой С. По окончании пуска заслонка откидывается и вода быстро сливается в нижний бак, к-рый по объёму раза в 3—4 больше верхнего, чтобы установленный в нем охладитель D работал с большим использованием и в рабочий период времени, когда жидкость нагнетается в верхний бак. Горячие водяные Р. выполняются с неподвижными электродами и подвижным уровнем жидкости. Т. к. рабочий процесс их происходит все время при 1°тп. воды (100°), то уд. проводимость Р. остается постоянной. В данном случае отпадает необходимость в охлаждающем приспособлении,
но зато все время приходится добавлять воду взамен испаряющейся. Чтобы избежать осадков при добавлении недистилированной воды, иногда используют для этой цели воду, получаемую от конденсации пара, для чего Р. снабжается специальной конденсационной установкой; в этом случае очень редка приходится пополнять Р. водой для поддержания необходимого уровня. Надежность работы, редкие осмотры и чистка Р., небольшой расход воды и отсутствие охладителей—преимущества горячих водяных Р. и потому они находят большое применение в мощных установках, .например для пуска и регулировки скорости вращения асинхронных двигателей больших прокатных станов. Единственный недостаток их—большие размеры. Р. с подвижными электродами выполняются как для двигателей малых мощностей, так и для двигателей мощностью до 1 500 kW; что же касается Р. с неподвижными электродами, то они изготовляют-
Фигура 9.
дяных Р., т. к. при больших мощностях электроды получаются тяжелыми и неудобными для перемещения. Сосуды для электродов бывают изолированные и неизолированные, отлитые из чугуна или сделанные из клепаного железа, причем в последнем случае расстояние между электродами и стенками сосуда должен быть достаточно велико во избежание образования больших сил тока, замыкающегося через стенки сосуда и вызывающего неравномерную нагрузку отдельных фаз Р. Электроды Р. выполняются из толстого листового железа (редко чугунные). Для предохранения электродных пластин от обгорания нижняя часть их наращивается пластинами четырехугольной формы, образующими т. н. предварительную ступень сопротивления, но вообще полное выключение электродов под нагрузкой не рекомендуется, т. к. кроме износа пластин могут получиться ы гремучего газа. Форма электродов выбирается такая, чтобы при опускании их в жидкость или при повышении уровня последней с постоян-
ной скоростью достигалось достаточно плавное изменение сопротивления. Сопротивление жидкостного I’. должно плавно уменьшаться до некоторого значения, при котором без особенного толчка тока Р. можно было бы замкнуть накоротко при помощи специального металлич. контактного приспособления. При больших мощностях и малых сопротивлениях Р. обычно ставят ряд параллельно включенных электродных пластин с равномерным чередованием полярности или фаз, причем при постоянном токе берут на п пластин одного полюса п +1 пластин другого полюса, благодаря чему можно не так удалять стенки сосуда от электродов, так как оба крайних электрода имеют одну полярность. При трехфазном токе при соединении треугольником, когда все электроды помещены в одном сосуде, число электродов берется равным п-Н, где п—число фаз (Фигура 10), что создает равномер
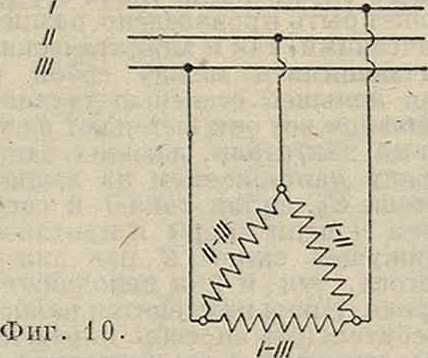
ную нагрузку фаз вследствие использования второй половины электрода третьей фазы. Управление жидкостными Р. может производиться от руки или электрическим способом. Здесь также возможен автоматический пуск в ход -при помощи специальных моторных реле в виде небольших асинхронных двигателей, вращающий момент которых при нормальном пусковом токе уравновешивает или подвижные электроды или заслонку, снабженные противовесом. При уменьшении тока в сети вращающий момент моторного реле также уменьшается, и электроды начинают погружаться в жидкость, что вызывает новое возрастание тока, и т. д. Таким образом достигается плавный пуск в ход двигателя. Предохранительные устройства в жидкостных реостатах обычно не делаются, а выносятся в виде отдельных реле, действующих непосредственно на главный рубильник.
II. Расчет элементов сопротивлений на нагрев. Расчет всех ступенчатых металлич. Р. сводится прежде всего к определению числа ступеней и сопротивления каждой из пих, а также к определению длины и поперечного сечения материя а, из которого должен быть изготовлены элементы сопротивления. Определение основных размеров материала производят 1) на основании подсчитанного предварительно сопротивления этой ступени и 5) на основании допускаемого повышения темп-ры при заданной мощности, учитывая при этом конструкцию Р., способ охлаждения и род нагрузки. Как правило все регулирующие Р. рассчитываются на продолжительную нагрузку максимальной для каждой ступени мощности; в частности для регуляторов возбуждения генераторов максимальная мощность ступени наступает тогда, когда подвижной контакт стоит именно на данной ступени. Пусковые Р. рассчитываются или на кратковременную нагрузку или на прерывистую в том случае, если пуск двигателя производится относительно часто. В случае продолжительной нагрузки поперечное сечение материала элемента сопротивления м. б. определено или по допускаемой плотности тока для данного случая (смотрите выше) пли более точно по ф-ле
Р=S · о8т^0Пг>
где Р—максимальное значение продолжительной мощности для данной ступени в W, S—поверхность охлаждения в см-, гдоп.—максимальное установившееся повышение t°. равное допускаемому значению, о8—коэф. теплоотдачи в W/см2 °С, учитывающий теплоотдачу лу чеиспусканием, конвекцией и теплопроводностью. Значения коэф-та os, вообще говоря, различны и кроме рода материала и состояния его поверхности зависят также до некоторой степени от формы и конструкции сопротивления и повышения ί°, т. к. пользование им без наличия достаточного оаытного материала несколько затруднительно. Приближенно значения os для обычно допускаемых значений повышения ί° можно брать из приводимой таблицы, в которой указаыо также, что надо считать за
Значения коэф и ц пента теплоотдачи о$.
| Род нагретого тела | 0*
В ЛУ/СЛ(2°С |
S В C.vt2 |
| Элементы сопротивления из никелиновой | 1____1_ | Общая по- |
| проволоки. | ||
| Трубчатые сопротивления : | верхность | |
| вертикальные. | ——----inn | |
| { Внешняя | ||
| горизонтальные. Чугунные сопротивле- | _____1
100 300 |
1 поверхность |
| ни я.. | Общая по- | |
| Пакетные сопротивле- | верхность | |
| ния из никелина. | Внешний | |
| Масляные пусковые пео- | поверхность | |
| статы .. | 1 | Поверхность |
| 1 1 | кожуха |
поверхность охлаждения в каждом отдельном случае. Мощность, цоглощаемая данной ступенью, м. б. выражена как Р=1*г, где I—си ;а тока, г—сопротивление данной ступени. Отсюда, зная уд. сопротивление материала ρ, можно найти например диаметр круглой проволоки, равный
71 У о8-тдоп.
гдоп.
При кратковременной нагрузке объём материала м. б. приближенно определен по формуле Pt=Ggr()(m., где ί—время в ск., G—вес материала в г и д—уд. теплоемкость материала в j/г °С, если известен уд. вес применяемого материала. В данном случае предполагается, что все тепло, выделяющееся в сопротивлении, идет исключительно на создание повышения t° элемента сопротивления, то есть не учитывается нек-рая отдача тепла в окружающую среду. Точнее расчет элемента сопротивления на нагрев при кратковременной прерывистой или перемежающейся нагрузке может быть произведен путем подсчета расчетного значения мощности Р®, которая создавала бы то же самое повышение ί°, но при продолжительной р нагрузке, по формуле Рр=~, где р—коэф. перегрузки, и путем дальнейшего пользования формулой Рр=Sosr^on. Коэф. перегрузки р, представляющий собой отношение максимального установившегося повышения ί° при продолжительной нагрузке сопротивления мошностью Р к тому аначению повышения к-рое получается в конце периода кратковременной нагрузки или при установившемся режиме при продолжительной прерывистой или перемежающейся нагрузках, м. б. для каждого отдельного случая подсчитан на основании ур-пй кривых нагрева и охлаждения
_ t
т=тт( 1-е т) иг=т,„е т,
где г,„—максимальное повышение ί°, т—повышение 1°, соответствующее моменту времени ί от начала нагрева,
и — постоянная времени нагрева. Значением Т
в этих случаях приходится сначала задаваться на основании предполагаемой конструкции сопротивления, а затем проверять его после окончательного расчета. В частном случае для кратковременной нагрузки 1
V — ~
to
1-е для продолжительной прер ывистой нагрузки
_
1-е Т
р---------,
_ hL
1-е Т
где 1„—период нагрузки, ij—период охлаждения. Отсюда видно, что для расчета пусковых Р. необходимо кроме всего прочего зпать время включения каждой
21
Г.Э.тп. XIX.
ступени и период времени охлаждения до следующего пуска. Об определении времени включения каждой ступени будет сказано ниже; значение же периода паузы tf, легко определяется на основании значений частоты пуска h, к-рое по германским нормам устанавливается 10-г-З для Р. с воздушным охлаждением для двигателей мощностью соответственно в 1,5—100 kW и означает число пусков двигателя в час при установившемся тепловом режиме, при котором повышение t° не превышает до-
пускаемого значения, т. e. tb=——ta ск. Повышение t° сопротивлений Р. за один пуск м. б. приближенно подсчитано по формуле τι=τ-~1, где Ζ—п у с к о в о е число, или число последовательных пусков с паузами между ними, равными двойному времени пуска, при к-ром повышение t° Р. достигает допустимого значения т^оп. Для Р. с воздушным охлаждением для двигателей мощностью в 1,5—100 kW значения Z устанавливаются германскими нормами соответственно 4-f-2. Существующие точные аналитич. методы расчета на нагрев элементов сопротивлений отличаются своей сложностью, и пользование ими целесообразно лишь в особо ответственных случаях. При расчете на нагрев масляных пусковых Р. принимается, что все тепло, выделяющееся в Р. за период пуска и равное приблизительно половине всей энергии Wm, потребляемой двигателем ва период пуска, идет на нагрев масла, повышение t° которого не должно превышать нек-рого определенного значения. Т. к. за период пуск^различные слои масла нагреваются по-разному и допустимое повышение 1° масла, равное 8о°, устанавливается для наиболее нагретого слоя, то в качестве допускаемого среднего повышения 1° для всего объёма масла принимают несколько меньшее значение, равное обычно ^<^.=60°. Отсюда, зная уд. теплоемкость масла, время пуска в ход и потребляемую двигателем при пуске мощность, нетрудно подсчитать необходимый объём масла, учитывая число пусков Z. С другой стороны, зная среднее повышение *°масла но сравнению с ί° окружающей среды за период пуска, равное
тср. — τдоп. ^ “ 22^ >
период охлаждения ti и коэф. теплоотдачи поверхности масляного бака os, можно подсчитать необходимую поверхность масляного бака по ф-ле: с,_ Wm
20g tjjTQp
Для масляных пусковых Р. к двигателям мощностью в 3—100 kW соответствующие значения числа пусков и частоты пуска по герм, нормам таковы: Z=5-f-3 и h=4-М),6. Поперечное сечение материала элементов сопротивления для масляных реостатов может быть подсчитано по приведенным выше значениям допускаемой плотности тока.
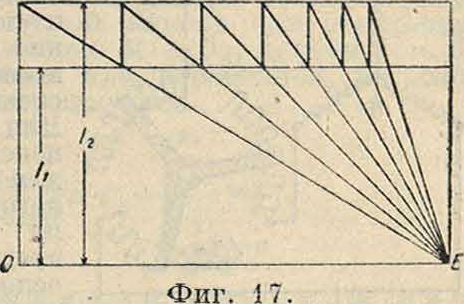
III. Расчет пусковых Р. Назначение пускового Р. заключается в ограничении силы тока при пуске в ход двигателя, которая в первый момент включения, когда двигатель еще неподвижен, и в дальнейшем, пока скорость вращения двигателя остается значительно ниже номинальной, может достигать весьма высоких значений, опасных для самого двигателя и вызывающих значительные толчки тока η питающей сети. Вводя впервый момент пуска в цепь якоря двигателя Р. и постепенно уменьшая сопротивление последнего по мере нарастания скорости вращения двигателя, получают возможность поддерживать силу тока при пуске в определенных пределах, превышающих номинальное значение тока, пе опасных для установки, но достаточных для преодоления начального вращающего момента и создания ускорения вращающихся масс, сцепленных с двигателем. При плавном пуске в ход, когда сопротивление Р. можно изменять плавно (например жидкостные Р.), сила тока за весь период пуска остается постоянной, и лишь после того, как все сопротивление Р. оказывается выведенным, что происходит несколько ранее достижения двигателем номинальной скорости вращения, ток постепенно спадает *до своего номинального значения. При ступенчатом пуске в ход, имеющем место в случае металлического Р., когда сопротивление Р. приходится изменять ступенями, сила тока за период пуска не остается постоянной, а изменяется скачками при переключении ступеней Р., оставаясь при этом все время в определенных пределах, и спадает до номинального значения после выключения всех ступеней Р. Характер изменения тока в данном случае изображен на фигуре 11,
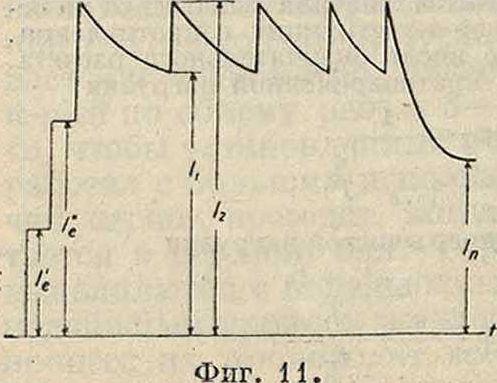
где /2—значения максимального пушкового тока, а 1г— значения тока переключения в момент перед переходом с одной ступени Р. на другую. В двигателях большой мощности во избежание резкого толчка тока в сети при включении, когда двигатель еще неподвижен, в Р. устраиваются т. н. предварительные ступени, благодаря которым сила тока не нарастает сразу до значения 1г, а подущает значения 1е, 1"е и т. д. в зависимости от числа предварительных ступеней. Сопротивление предварительных ступеней выбирается такое, чтобы при включении их двигатель не мог еще начать вращаться. Величинами, характеризующими пусковое условие и имеющими значение при расчете числа ступеней пускового Р. и сопротивления каждой ступени, кроме основных данных двигателя являются также следующие:
ίι=~ и λ=~, (иногда также) j2=—
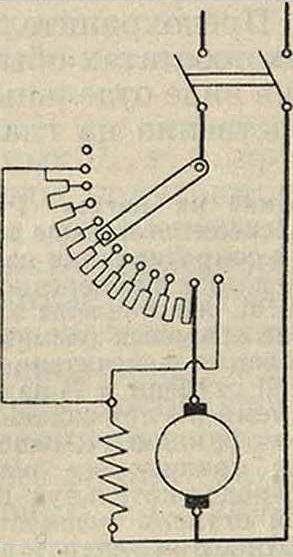
*п 11 *п и т. н. тяжесть пуска, то есть отношение средней пусковой мощности к мощности, потребляемой двигателем при полной нагрузке; это отношение м. б. выражено ф-лой j Vλ. Значения jχ и для двигателей мощностью 1,5— 100 kW обычно берутся соответственно: для асинхронных двигателей j1=l,02-f-l,12 и 12=1,84-И,53, причем эти значения относятся к силам тока ротора, а для двигателей постоянного тока ;1=1,11-г-1,17из2=1»5 3-г-1,45. Самое определение числа ступеней и сопротивления их может быть произведено различными методами как графическими,· так и аналитическими, различающимися между собой большей или меньшей степенью точности, но в основном все они вытекают из основных ур-ий двигателя, дающих зависимость между напряжением на зажимах двигателя Eji, силой тока I и сопротивлением R цепи якоря и противоэлектро-движущей силой Е как для вращающегося, так и для неподвижного двигателя. Ния;е приводятся наиболее употребительные способы определения числа ступеней и их сопротивления пусковых Р. для двигателей постоянного тока и асинхронных двигателей. а) Расчет пусковых Р. для двигателей постоянного тока. Принципиальные схемы включения пусковых Р. показаны на фигуре 12 (для сериесного двигателя) и на фигуре 13 (для шунтового); в последнем случае необходимо, чтобы цепь возбуждения перед включением якоря находилась под полным напряжением сети, так как при этом двигатель может развить необходимый крутящий момент при меньшей силе тока в цени якоря. На фигуре 14 изображена схема включения специального пускового Р.для реверсивного шунтового двигателя. В этом случае при перемене направления движения рукоятки изменяется направление тока в цепи якоря, тогда как направление тока в цепи возбуждения остается постоянным, благодаря че-
Фигура 13. Фигура 14.
му можно изменять направление вращения двигателя. Число ступеней такого Р. остается одинаковым по сравнению с обычными Р., но число неподвижных контактов приходится увеличивать вдвое. При всех схемах включения пусковых Р. необходимо учитывать и устранять возможность пробоя обмотки возбуждения вследствие возникающих в ней перенапряжений при выключении тока. С этой целью или устраивают так, чтобы в момент выключения тока обмотка возбуждения оказывалась замкнутой на Р. (фигура 13). или включают в ее цепь добавочное сопротивление rg (фигура 14). Графический метод расчета, предложенный I ергесом, основывается на следующих соображениях: так как в любой момент времени.
Фигура 12.
сила тока в цепи якоря может быть выражена уравнением т Ек-Е R 9
то отсюда следует, что для различных R изменения силы тока в зависимости от значений Е графически изображаются в виде семейства прямых линий ЛС, АСг и т. д., сходящихся в точке А (фигура 15). С другой
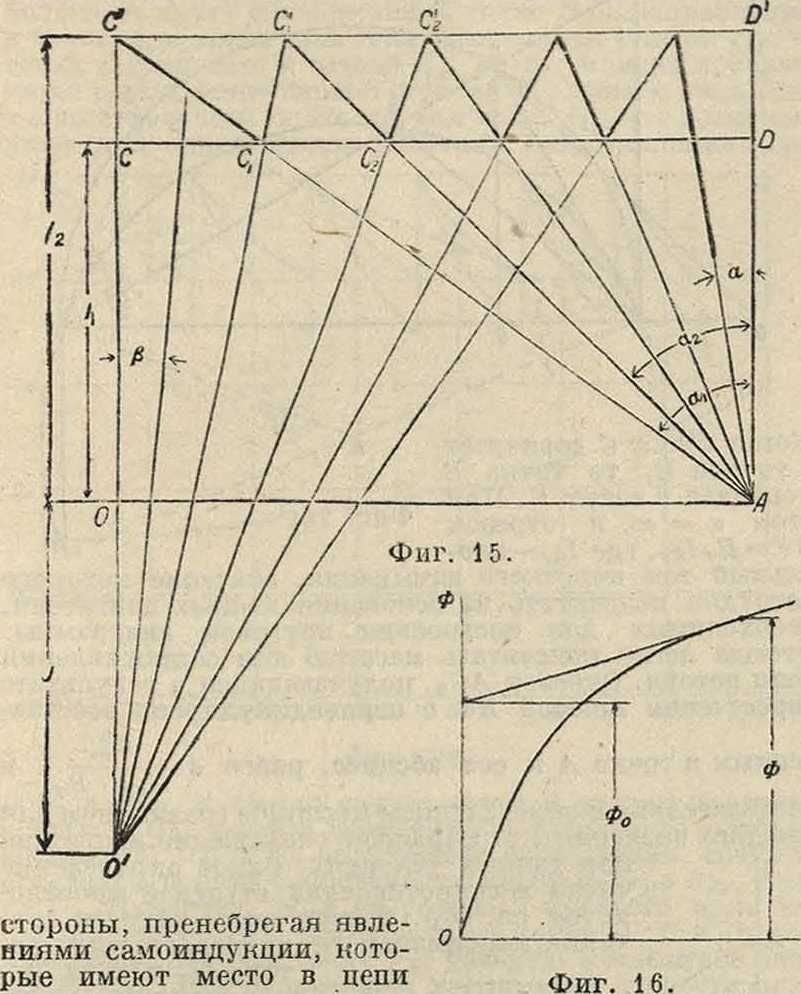
при всяком изменении силы тока, и считая, что в момент переключения ступеней Р. относительное насыщение магнитной системы двигателя Mq— к-рое для сериеспых двигателей находится по кривой намагничения (фигура 16), а для шунтовых— равно единице, остается постоянным и равным таковому же при силе тока J2, можно получить зависимость
Е=~· · со C + J)=Const ω (7 + J),
J COg
где ω4—синхронная угловая скорость вращения, ω—те-кущее значение угловой скорости вращения, а
отсюда для различных значений ш зависимость 7 от значений Е представляется в виде семейства прямых OCi, OCi и т. д., выходящих из точки О (Фигура 15). Для построения диаграммы для сериес-двигателя по оси абсцисс откладывают отрезок ОА (фигура 15), изображающий в пек-ром масштабе напряжение на зажимах Eh; от точки О вверх по оси ординат откладывают отрезки ОС и ОС, изображающие в масштабе силы тока 7, и 72, а ениз—отрезок 00, выражающий в том же масштабе впачекие J. Точку С соединяют с А, тогда tgai в масштабе дает значение максимального сопротивления цепи якоря Κι при полностью включенном Р., т. к. в первый момент включения, когда двигатель еще непод-Ек вижеп, R1=-T£. Если через точку C1 па пересечении пря-72
мой С’А с горизопталыр CD провести из точки О прямую ОС] до пересечения с горизонталью СО в точке С] и соединить точку С[ с точкой А, то tg u2 лает значение сопротивления цепи якоря 77 2 после выключения первой ступени Р. Действительно с увеличением скорости вращения двигателя сила тока начинает уменьшаться по прямой СА, т. к. сопротивление цепи якоря остается при этом постоянным и равным Нг, причем для любой точки этой прямой тангенс угла, образуемого прямой, соединяющей эту точку с точкой О, и осью ординат, т. e. tg β, выражает в определенном масштабе угловую скорость вращепия, т. к.
tg/)= y^-Const·®.
В момент, когда срла тока достигает значения 7, что соответствует точке С, производится перевод подвижного контакта Р. на следующий, то есть выключение первой ступени Р. Вследствие уменьшения сопротивле ния сила тока опять возрастает и должен быть снова равной /2, причем так как за короткий промежуток времени, в течение которого производится переключение ступепей, угловая скорость вращения не успевает измениться, то точка, характеризующая новое сопротивление цепи якоря, должна лежать на пересечении ирямых CD п ОС,. то есть в точке Cf, и сопротивление цепи якоря при выключенной первой ступени Р. выражается тангенсом угла а“. Дальнейшее построение производится таким же образом и понятно из чертежа. Когда все ступени Р. выведены, то сила тока продолжает спадать ниже значения /1# и по достижении двигателем номинальной скорости вращения она также достигает номинального значения. Изменения силы тока при пуске даны па диаграмме жирной линией. TTmi пг.гтлортши диаграммы необходимо, чтобы tg атточно равнялся сопротивлению Rm якоря двит ателя и соединительных проводов, если же этого не получится, то необходимо слегка изменить значение 1 или /2.
Пользуясь этой диаграммой, нетрудно определить число ступеней Р. m=n-l, где п—число положений рукоятки,и сопротивление цепи якоря для каждого положения подвижного контакта, определяемые тангенсом углов а.Разность сопротивлений для каждых двух соседних положений дает сопротивление соответствующей ступени Р. В случае ненасыщенного сериес-двигателя, для κ-ροΓθμρ=0, Jтакже оказывается равным нулю, и диаграмма изменяется в том лишь отношении, что точка О совпадает с точкой О. В случае шунтовых двигателей J=co,t.k. м6 =, и поэтому диаграмма
принимает вид, изображенный на фигуре 17. Т. к. для шунтового двигателя ω иронорциональна Е, то угловая скорость вращения для каждого момента легко м. б. найдена, если по оси абсцисс нанести также масштаб для угловых скоростей вращения. Для двигателей со смешанным возбуждением диаграмма остается такой же, как и для сериес-двигателя, только изменяется значение м6, к-рое должно учитывать такнсе влияние и шун-товой обмотки возбуждения. В этом случае де=1-Я(1-„ео),
„ h.
где Н=—, μ„— среднее относительное насыще-
1т+12 ео
ние при силе тока I, а 1т—ток возбуждения шунто-вой обмотки, пересчитанный на силу тока последовательной цепи возбуждения. Из диаграммы фигура 15 следует, что отношение эдс, наводимых при переходе с одной ступени на другую, остается постоянным и равным е. Это обстоятельство позволяет при помощи осповных ур-ий процесса пуска рассчитать Р. и аналитич. методом, для чего необходимо знать сопротивление якоря двигателя и соединительных проводов Rm, напряжение сети Ец, относительное насыщение магнитной системы двигателя μρ, а также значения λ и /2, которые или указываются в задании или выбираются конструктором. Порядок расчета следующий: сначала находят λ __
1 + (λ —1 )Mj
затем по значениям Е и 12 находят наибольшее со-
Еь противление пусковой цепи Ri=—, после чего число
12
ступеней Р. определяется по ф-ле
: ln[if(1^)+(e-1)]-ln(;-1)
ίηε-In Λ
причем т должен быть целым числом, если же этого не получается, то необходимо соответственно слегка изменить значение-Я. Сопротивление последней ступени Р. равно гт_1=В,[-8 (Л--
и сопротивление же любой ступени находится по ф-ле
Т -Г
Тт - у Тт-1 еJ
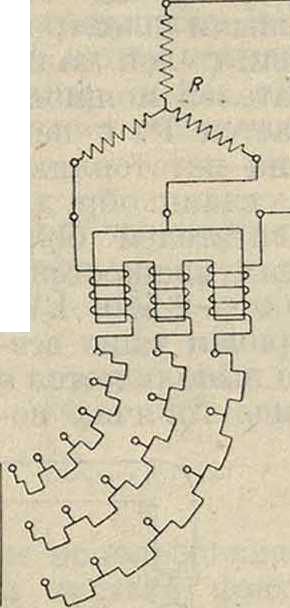
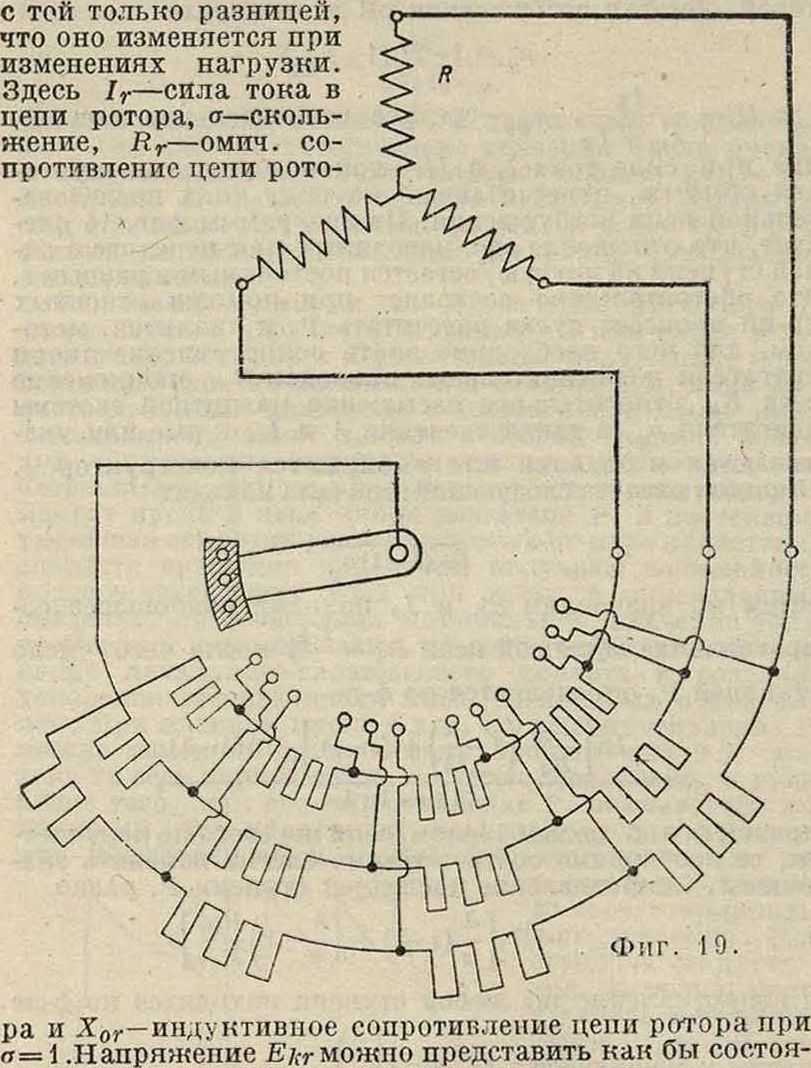
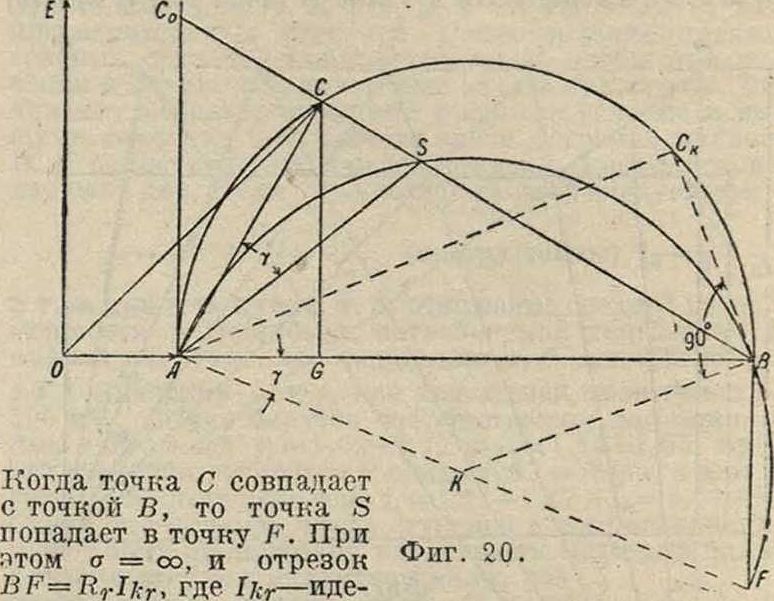
б) Расчет пускового Р. для асинхронного двигателя. Обычпая схема включения пускового Р. для трехфазяого асипхроппого двигателя изображена на фигуре 18 (S—статор), где пусковой Р., введенный в цепь ротора Н, и обмотки ротора соединены в звезду. Иногда с целью уменьшения числа контактов или для увеличения числа ступеней сопротивления отдельных цепей ротора, разбитые па определенное число ступепей. включаются поочередпо в общий контактный ряд; в этом случае Р. имеет один общий подвижной контакт. Принципиальная схема такого способа включения, предложенная впервые Каллен-бергом, изображена па фигура 19. Этот способ включения вследствие получающейся при этом неравномерности нагрузки отдельных фаз может применяться лишь в тех случаях, когда не требуется строгого выполнения последнего условия. Пусковые Р. для реверсивных двигателей могут выполняться по обеим схемам включения, причем схема аналогична схеме для двигателей постоянного тока. В случае редкого изменения направления вращения двигателя рациональнее применять обычный пусковой Р., а переключение Фазовых цепей статора производить при помощи специального рубильпика. Для определения числа ступеней и их сопротивления для каждой фазы трехфазного асинхронного двигателя пользуются методом, предложенным Гбргесом и основанным па видоизмененной диаграмме. Гейл айда. построенной не для сил токов в цепи статора, а для напряжений в цепи Р., при.допущении, что омич, сопротивление статора ничтожно и потери холостого хода настолько малы, что ими можно пренебречь. При этом за вертикальную ось координат берется направление вектора напряжения па зажимах статора, а диаметром круга служит отрезок АВ, изображающий в масштабе трансформаторное напряжение холостого хода Еог(фигура 20). Для любой точки С данной окружности один из катетов прямоугольного тр-ка АВС А с=IrXor представляет в масштабе напряжений вектор силы тока ро-
ц тора, поверпутый па 90°, а катет ВС=1Г —=Еку представляет напряжение ротора, компенсирующее омическое падение напряжения в цепи ротора. Напряжение Екг м. б. уподоблено напряжению на зажимах двигателя постоянного тока,
Фигура 18.
щим из двух слагающих: омич, падения напряжения, к-рое имеет место в действительной цепи ротора IrRr=
«= CS, и напряжения Ег =* 1% ~~ (1 - σ)=SB. Т. о.
Екг=Ir^r + Ег, где Ег по аналогии с такой же формулой для двигателей постоянного тока можно считать как бы противоэлектродвижущей силой, наводимой в роторе. О А и ОС—токи статора при холостом ходе и при нагрузке, пересчитанные на ротор в масштабе напряжений, GC—вращающий момент двигателя. Нетрудно доказать, πτοΖν не зависит от нагрузки и изменяется лишь в зависимости от сопротивления цепи ро тора, откуда следует, что при изменениях нагрузки при постоянстве сопротивления цепи ротора точка S перемещается по окружности, проходящей через точки А, В и S. Если при возрастании нагрузки точка С приходит в точку Ск, то точка S совпадает с точкой В, тогда Ekr= — IrRr п следовательноσ= 1, что соответствует моменту пуска в ход, когда двигатель еще не начал вращаться.
альный ток короткого 8амыкапия, значение которого нетрудно подсчитать на основании данных двигателя, необходимых для построения круговой диаграммы. Отсюда легко подсчитать масштаб для сопротивлений цепи ротора. Отрезок АС0, получающийся_в результате пересечения прямой ВС с перпендикуляром, восстав-
ЕL·
ленным в точке А к оси абсцисс, равен о ·—и кг · Кг следовательно в определенном масштабе (различном для каждого значения Rr) выражает скольжение двигателя при данных условиях. Самое определение числа и сопротивления ступеней производится сл. обр.: прежде всего находят значения максимального пускового тока ротора 12г “ тока переключения 11Г по
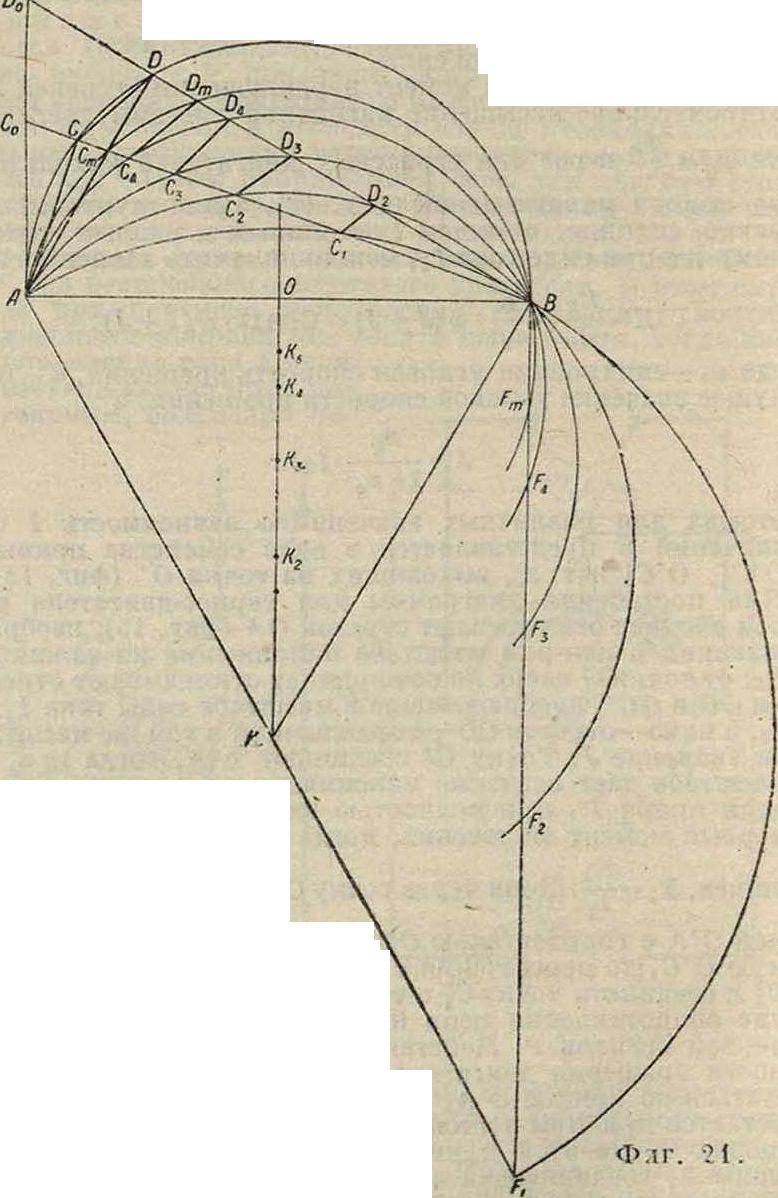
выбранным предварительно значениям j2и ΐι и наносят полученные значепия в масштабе напряжений па диаграмме Гейл апда (фигура 21) в виде отрезков AD=I2r у— и Iky Е
АС=I гг и-полученные * кг ч
точки D и С соединяют прямыми с точкой В. Прямые DB и СВ являются геометрическим местом точек S, определяющих сопротивление цепи ротора при постоянной силе тока 12г или /И-.В момент пуска ротор двигателя неподвижен и а— 1, сопротивление же ротора должен быть таково, чтобы сила тока быларавна/2г“Прив= 1 прямая, проведенная из точки круга напряжений Гейланда, соответствующей пуску (точка П), в точку В, является касательной к кругу скольжения, соответствующему сопротивлению цепи ротора при полностью включенном Р., то есть максимальному сопротивлению цепи ротора Rir.
Центр этого круга скольжения находится так: из точки В восставляют‘перпендикуляр к В В и находят точку пересечения его Кх с перпендикуляром, восставленным из центра круга Гейлапда. Эта точка и является центром искомого круга радиуса АК^=ВКХ. Точка пересечения Fi этого круга с перпендикуляром, восставленным к АВ в точке В, отсекает на последнем отрезок FXB - Iky Вir, откуда т.о. находится сопротивление Rxr. При возрастании скорости вращения ротора сила тока и роторе уменьшается, и точка S перемещается по наибольшему“ кругу скольжения от точки В по направлению к точке А, и когда сила тока оказывается равной 1ХГ, то точка S совпадает с точкой Сх. В этот момент производится выключение первой ступени Р., причем сила тока должпа возрасти опять до значения 1гг, что возможно лишь при определенном значении сопротивления цепи
Фигура 22.
ротора R2r· В данном случае точка S должна совпасть с точкой D 2, которая в свою очередь должна находиться на прямой DBn на окружности скольжения, соответствующей новому сопротивлению пени ротора R2r. Точка В2 находится, если из точки Сх провести прямую, параллельную CD. Проведя через точки А, В и В2 окружность, находят точку Ь, дающую в масштабе значение Rгг- При дальнейшем увеличении скорости вращения точка S перемещается по данной окружности от D2 к С2> и, когда она приходит в точку С2, производится выключение второй ступени Р. Для определения числа ступеней Р. и сопротивления каждой из них аналогичные построения производятся до тех пор, пока полученное сопротивление не окажется в точности равным сопротивлению фазовой обмотки ротора и соединительных проводов Rm. Если такого совпадения не получается, то слегка изменяют значения /1г или /2г. Скольжение в любой момент времени может быть найдено, если из точки В провести прямую через любую точку, лежащую на участке CD круга Гейланда и соответствующую силе тока ротора в данный момент, до пересечения с вертикалью АВ0. Тогда отрезок от точки Λ до точки пересечения дает значение скольжения в масштабе, различном для одной и той же силы тока, но при различных сопротивлениях цепи ротора. Расчет Р. для асинхронных двигателей м. б. произведен также и акалитич. методом. Если напряжения, соответствующие силам тока /2Г и 1ХГ и выражаемые отрезками DB и СВ у обозначить соответственно через Е2кг и
Εχίο· и ввести обозначение ε =, то нетрудно дока зал·?·
зать, что сопротивление v-той ступени м. б. выражено через максимальное сопротивление цепи ротора Rxrеледующей ф-лой
RV=R
где λ =
I-zr
сопротивление же J?lr =
Eh у 1кг
Кроме указанных способов существует еще целый ряд других, б. или м. различающихся друг от друга, но результаты, получающиеся при пользовании ими, весьма близки друг к другу. в) Определение периода пуска двигателя и времени включения отдельных ступеней Р. Периодом пуска 1т называется время, в течение которого ток протекает только по пусковым ступеням реостата. Ясно, что период пуска всегда меньше того времени, в течение которого скорость двигателя достигает номинальной. Приближенно вычисление периода пуска двигателей мощпостыо до 200 kW при нормальных условиях можно производить по омпирич. формуле 4 + 2YPn, где Рп—номинальная мощность двигателя в kW. В случае приведения двигателем в движение больших масс значение tm следует подсчитывать болер точно. Аналитические методы подсчета значений 1т и времепи включения отдельных ступеней весьма сложны и кропотливы даже в случае,
если пуск происходит при постоянном нагрузочном моменте; если же последний изменяется в зависимости от скорости вращения, то такой подсчет представляет весьма большие затруднения. Поэтому весьма удобпо пользоваться графич. методом, к-рый пригоден для обоих случаев и одинаково м. б. примепен как в случае двигателей постоянного тока, так и асинхронных. Ускоренное движение вращающихся масс математически можно выразить следующим ур-ием
0 ~=D ~М, at
где 0—момент инерции вращающихся частей двигателя и сцеплениых с ним масс, D—момент, развиваемый двигателем, и М—противодействующий, или нагрузочный, момент. Обозначая через В2 момент, развиваемый двигателем при максимальном пусковом токе 12, и выражая нагрузочпый момент как некоторую часть этого момента, а именно M^cD>, причем а м. б. пли постоянной величиной или переменной, на основании предыдущего ур-ия получаем где Ts
0а>я
D%
d -<м
D__
D2
— постоянная времени pas-
бега, a —синхронная угловая скорость вращения двигателя. Дальнейшие преобразования дают
т*=Гус1-° >
Ts J о>,«{
где у=- jj-. Для решения последнего ур-ия графич. щ~а
способом по оси ординат откладывают значения —,
ί 2
«ц _ ω
а по оси аосцисс—значения —, найденные для каждою
(Og
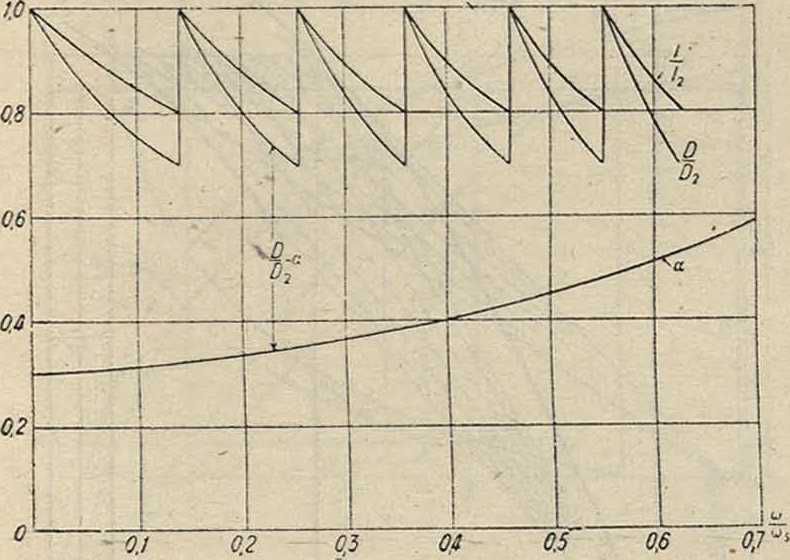
значения со по приведенным выше пусковым диаграммам Гбргеса (фигура 22). Имея данные кривые, нетрудно
1). ft) _
построить также и кривые -=/—|. Если известен D 2 (os )
закон изменения а в зависимости от со, то на этон же диаграмме м. б. нанесена также и кривая α= <р(—).
c°s
Разность между ординатами кривых _?-=(ωΛ и α=»
В2 ω$
ο> D со
= 9 αΤ]* Равная χΓ~α’ дает для каждого значения —
соответствующее зпачение на основании которых на фигура 23 построена кривая 1, ур-ие которой у=у>
Площадь, ограниченная этой кривой, осью абсцисс и соответствующей ординатой, выражает относительное время включения, считая с момента начала пуска. На фигуре 23 кри
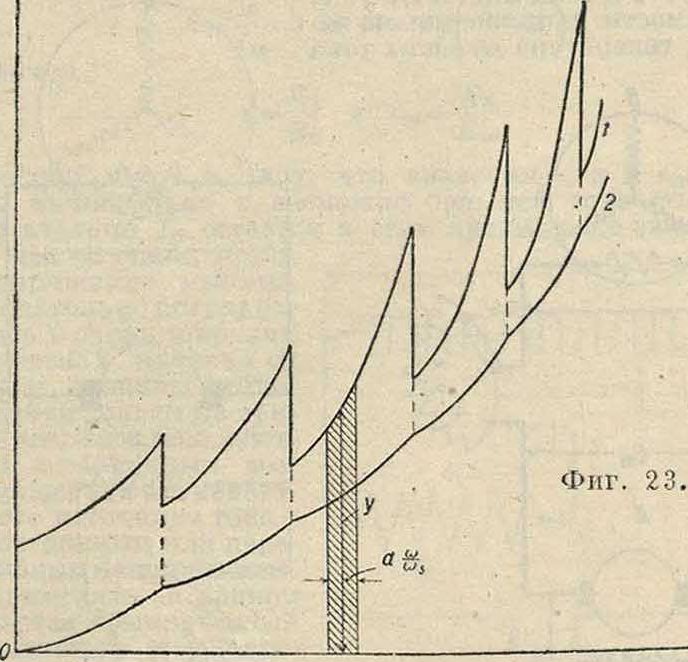
вая 2 изображает зависимость пользуясь к-рой находят как полный период пуска, так и время включения отдельных ступеней Р.
IV. Расчет р гулирующих р. сводится к определению числа ступеней и сопротивления их в зависимости от требований, предъявляемых относительно характера изменений величины, подлежащей регулировке.
Что же касается расчета на нагрев, то все ступени регулирующих Р. рассчитываются исключительно на продолжительную нагрузку, максимальную для каждой из них мощности. а) Расчет Р. для регулировки напряжения электрических машин. Принципиальные схемы включения подобных Р. изо-
|
L |
П / | |||
| — | т
-Λνννν— -АДА- |
П II
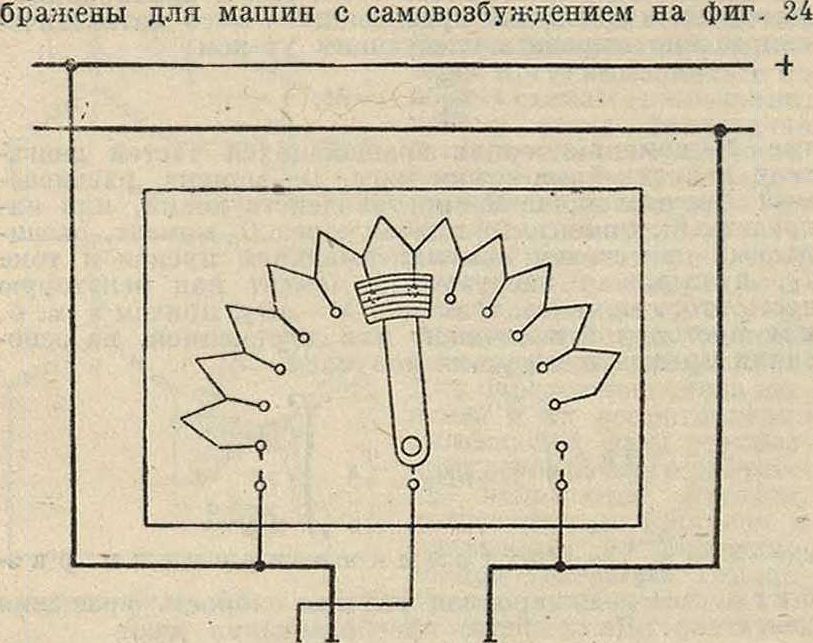
КУ Ц/WyVW- Фвг. 24. | ||
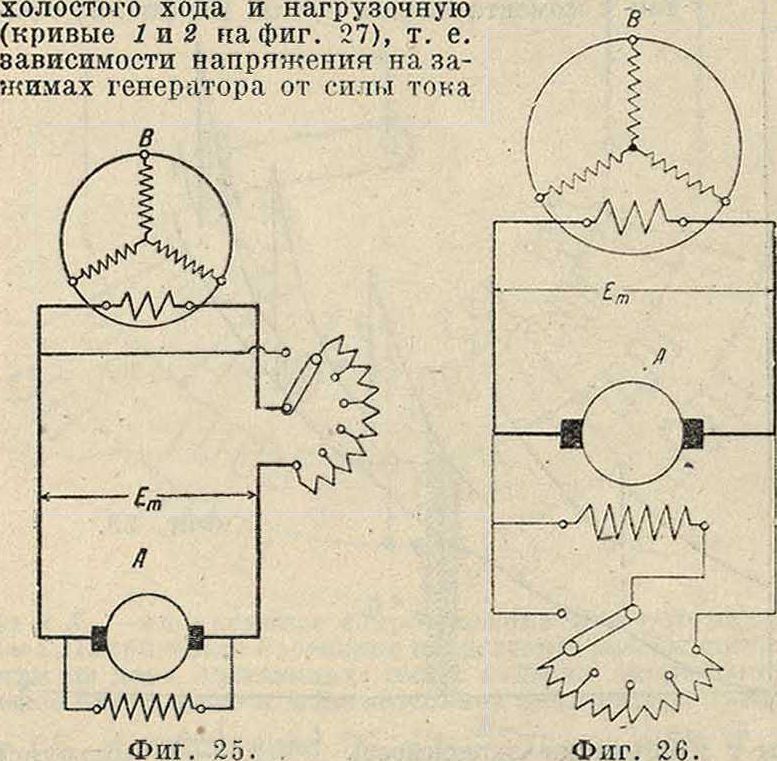
ία—компаунд генератор, б—шунтовой генератор), для машин с посторонним возбуждением—на фигура 25, 26 (А—возбудитель, В—генератор). Р. для поддержания постоянства напряжения должны давать возможность при неизменном или повышенном на 10% числе оборотов поддерживать напряжение генератора постоянным от холостого хода до полной нагрузки, причем нормальные допустимые отклопения от номинального напряжения при регулировке принимаются следующие: ±2—3% для генераторов мощностью до 100 kW и ±1—2% для мощности свыше 100 kW. Для расчета необходимо иметь характеристичные кривые генератора:
возбуждения для обоих случаев. Тогда, если в пределах от холостого хода до полной нагрузки напряжение при регулировке должно поддерживаться приблизительно постоянным, изменяясь лишь в пределах от Ег до Ει, то для генератора с самовозбуждением получается следующая картина (фигура 27). Если соединить точку а с точкой О, то полущенная прямая определяет tie только сопротивление цепи возбуждения для этого момента (тангенс угла а01т), по и изменения напряжения па зажимах в зависимости от тока возбуждения при постоянном сопротивлении цепи возбуждения, так как при этом последнем условии вышеупомянутая прямая является внешней характеристикой. Т. о. при возрастании нагрузки уменьшение напряжения происходит по этой прямой. В момент, когда напряжение достигает значения Ел, выключают первую ступень Р., почему уменьшается сопротивление цепи возбуждения и увеличивается ток возбуждения. Это вызывает возрастание напряжения, которое происходит
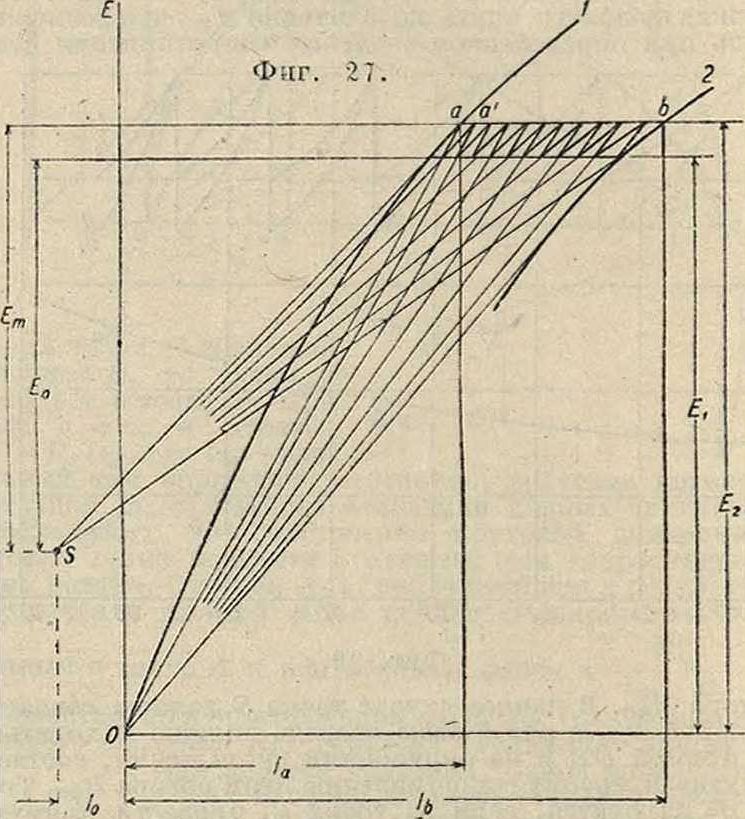
по соответствующей "нагрузочной кривой, причем для того, чтобы значение его не превысило Е2, необходимо в цепи возбуждения иметь сопротивление, значение которого определяется тангенсом угла наклона прямой, проведенной из точки О через точку а пересечения нагрузочной кривой с горизонталью, проведенной через точку а с ординатой, равной Е-г. При дальнейшем повышении нагрузки изменения напряжения происходят по прямой Оа, и предыдущие построения повторяются до тех пор, пока не приходят в точку b на нагрузочной кривой для полной нагрузки. Ход построения диаграммы на фигуре 27 ясен из чертежа, если отметить, что для простоты участки нагрузочных кривых
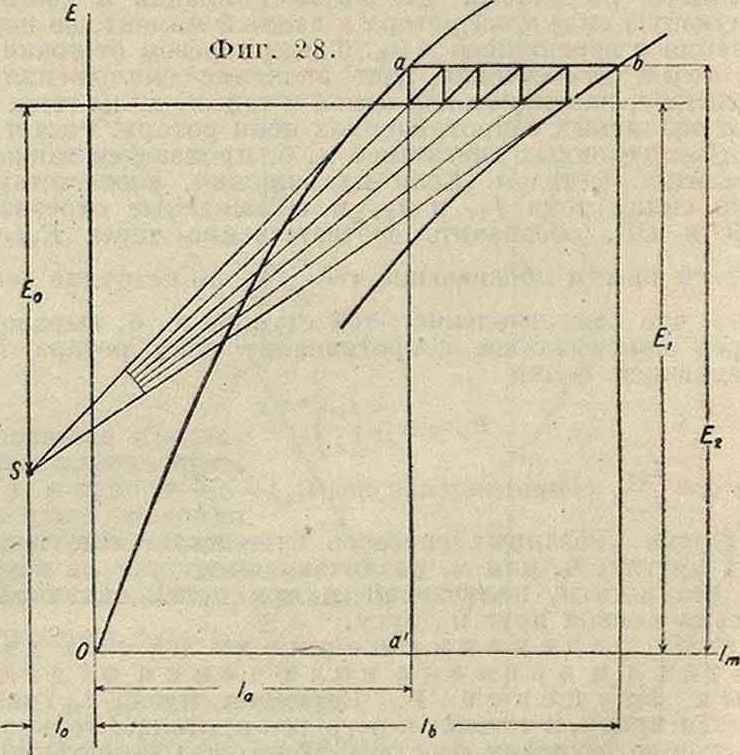
в пределах колебаний папряженпя с достаточным приближением м. б. приняты за отрезки прямых, касательных к соответствующим нагрузочным кривым и пересекающихся в одной точке S. В случае независимого возбуждения (фигура 28) весь ход рассуждения остается тот же, с той только разницей, что уменьшение напряжения при увеличении пагрузки происходит по вертикали оа, т. к. при постоянном сопротивлении цепи возбуждения и постоянном напряжении возбудителя ток возбуждения при изменениях нагрузки остается также постоянным. На основании этих диаграмм легко находится необходимое число ступеней Р., а по тангенсам углов наклона, выходящих из точки О, легко найти сопротивление цепи возбуждения для каждого положения подвижного контакта Р. Последнее однако удобнее сделать, если построить кривые сопротивления в зависимости от тока возбуждения. Для этого проводят прямую М (фигура 29), параллельную осп ординат; тогда ордината пересечения этой прямой с лучом ОЕко, тангенс угла наклона которого равен сопротивлению обмотки возбуждения, дает в
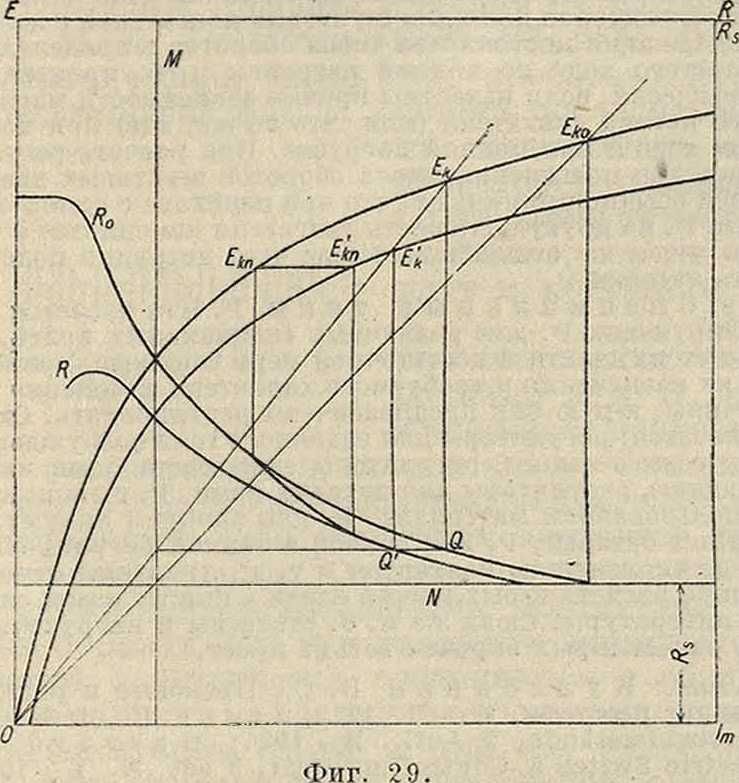
пек-ром масштабе сопротивление обмотки возбуждения R„. Через полученную т. о. точку пересечения проводят горизонталь N и на правой оси ординат наносят масштаб сопротивлений, принимая сопротивление обмотки возбуждения за единицу. Теперь в случае машины с самовозбуждением из точки О проводят прямую ΌΕ;,· под любым углом к оси абсцисс, соответствующую нек-рому сопротивлению R. Из точки пересечения этого луча с прямой М проводят горизонталь, а из точки пересечения с кривой холостого хода Е/с опускают перпендикуляр до пересечения с данной горизонталью в точке Q, ордината которой и дает значение сопротивления h, для кривой холостого хода. Точно так же можно найти значение сопротивления л; для полной нагрузки, определяемое точкой Q, для чего необходимо опустить перпендикуляр из точки Ек пересечения луча ОЕк с нагрузочной кривой. Произведя ряд аналогичных построений, находят кривые сопротивлений Л0 и Л для холостого хода и полной нагрузки. Кривая сопротивлений для участка, где напряжение должно оставаться постоянным, находится таким же способом, если из точки О провести ряд лучей до пересечения с прямой EknEkn. В случае машин с постоянным возбуждением кривая сопротивлений как для холостого хода, так и для пагрузки остается одна и та же, и построение ее производится так же, как и в предыдущем случае, то есть из точки О проводится ряд лучей до пересечения с горизонталью, ордината которой равна напряжению возбудителя, если последнее постоянно, или с кривой зависимости напряжения возбудителя от силы тока возбуждения, если напряжение возбудителя переменно. Из полученных точек пересечения опускают перпендикуляры до пересечения с горизонталями, проведенными через точки пересечения соответствующих лучей с прямой М. Если на диаграммах фигура 27, 28 нанести подобные кривые сопротивлений, то нетрудно видеть, что с помощью их легко можно найти сопротивление ступеней Р. как для случая поддержания постоянства напряжения, так и для изменения его при холостом ходе или при полной нагрузке. В последнем случае необходимо лишь задатьсн характером этих изменений и, опустив перпендикуляры на соответствующие кривые сопротивления, найти по полученным точкам сопротивления для каждого положения подвижного контакта Р. График, метод определения числа ступеней весьма кропотлив и требует большой точности построений, поэтому часто удобнее пользоваться графоаналитич. методом, основанным на тех же диаграммах фигура 27, 28. В случае машин с посторонним возбуждением, когда генератор работает с постоянным напряжением, число ступеней Р. находится ио ф-ле
_ In (I/, + 7q) — In (Iη—7р) ^
In (1 + Λ)..
E E ·>
где A=(1-s)5j, г - -l π φ — ,·2. Все остальные обозна-Е 2 Е о чегшя понятны из чертежа, причем если точка S находится слева от оси ординат, то /0 положительно, а если—справа, то /0 отрицательно. Если при независимом возбуждении генератор работает с переменным напряжением, причем при переключении каждой ступени напряжение должно изменяться на С-ю часть от предыдущего значения, то есть то число ступеней
= 7?! О + S)v_1
In Е,-In E i
In (1 + 0
Для определения сопротивления каждой ступени практически поступают так. Все ступени Р. для области регулировки разбивают па секции I, II и т. д. и в каждой секции ступени выполняют с одинаковым сопротивлением. Границы секций выбираются в зависимости от допустимой нагрузки для различных сортаментов материала, идущего на изготовление сопротивлений, и для каждой секции находят число ступеней. При постоянном напряжении возбудителя Ет сопротивление цепи возбуждения в начале первой секции E Е
равно 7?/= -j™:, а в конце секции Rn= jjy где 7
п Ijj—ток возбуждения в начале и конце секции. Общее сопротивление всех ступеней данной секции
г „ Щ-Л
=ятйГ’
г Г
а сопротивление каждой ступени г=-, где п,—число
711
ступеней секции. Если напряжепие возбудителя переменно (фигура 26), то необходимо знать еще зависимость напряжения возбудителя от силы тока возбуждения возбудителя 1т. Тогда сопротивление цепи возбуждения возбудителя в начале первой секции д.б.й/=,
а в конце секции Rn= 7—“, откуда аналогично пре-* mil
дыдущему сопротивление каждой ступепн первой сек-пни г — К M, значения Е,„ для соответствующих
п1
точек кривых характеристик генераторов находятся по формуле Ет=1Ит, где Нт—сопротивление обмотки возбуждения генератора, а 1—сила тока главной цепи возбуждения генератора. Для шунтовых генераторов графоаналитический метод расчета Р. длп поддержания постоянства напряжения основан на диаграмме фигура 27. Если принять во внимание обозначения па этой диаграмме, то число ступеней определяется по ф-ле
h
n=In -
Ia-
N φ·χ 1-χζ 1
” 1η χ’
1-χ*
где χ= 1 + ft; φ=2 + к и в свою очередь
-1 и N=1,
(Ε-Λ,
£т )
причем
E i
Ё2
И ε.
т
Ео
Έ
т
Следует иметь в виду, что значения ε, х и ет должны вычисляться с возможно большей точностью. Относительно 70 остается в силе предыдущее замечание. В тех случаях, когда напряжение машины желательнорегулиро-, ππππππΠΠΠΠΠ_Α вать в очень широких H NUUuUUUU^ пределах, начиная от ^
нуля, машины с самовозбуждением не применяются и пользуются независимым возбуждением от некоторого источника тока с постоянным или переменным напряжением.
Применять в данном случае обыкновенный регулятор возбуждения было бы весьма невыгодно, так как потребовалось бы очень большое сопротивление
-ΛΜΛΛ/^
30.
1 а
/- Фиг.
/7
_ Р., материал сопротивления был бы плохо использован и Р. получил б »ι слишком большие размеры. В этом случае Р. выключают потенциометром (фигура 30, К,—реостат, Rs—обмотка возбуждения). Очевилно, что в этом случае напряжение машины можно регулировать от полного максимального значения до нуля. На основании закона Ома для данного случая следует
ImRs=Ек- IR=(I - IM) (Rx - R), где 1т—сила тока возбуждения, а I—сила тока в не-разветвленной цепи. Отсюда
, -R) п Г Ek(R1-R + Rs)
m RR1 — RZ + R1 Rs R1R-R2 + R1RS
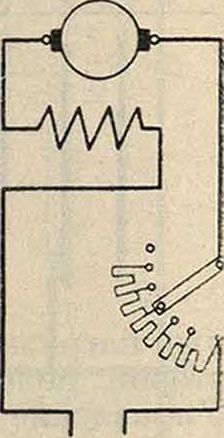
Первое ур-ие дает возможность для каждого значения тока возбуждения 1т найти соответствующее значение сопротивления R, а второе ур-ие позволяет найти максимальное значение силы тока для каждой ступени, по к-рому следует рассчитывать данную ступень на нагрев. б) Расчет Р.для регулировки скорости вращения электродвигателей. Различают два основных вида Р.: регуляторы тока главной цепи двигателя, которые включаются аналогично с пусковыми Р. п при помощи которых можно понижать число оборотов двигателя ниже номинального, и регуляторы поля шунтовых двигателей, включаемые в цепь возбуждения и позволяющие уменьшать силу тока возбуждения и т. о. повышать число оборотов двигателя. Весьма часто регулирующий Р. комбинируется в одном кожухе спусковым; такие Р. называются пусков регулирующими. Схема включения такого Р. для шунтов ого двигателя изображена на фигуре 31. С помощью
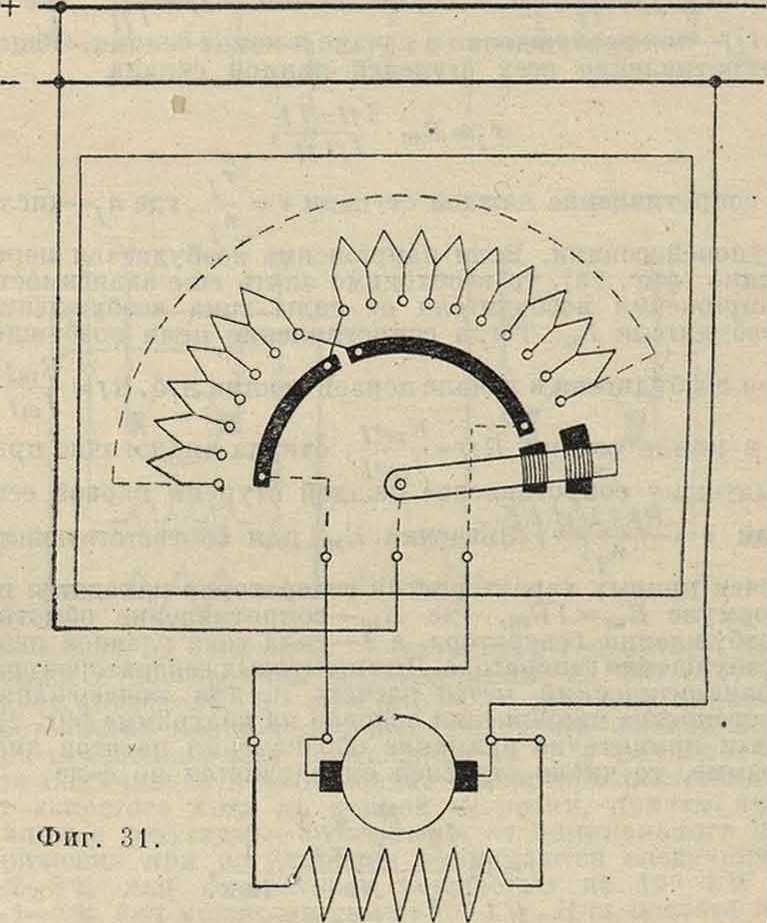
подобных Р. для шунтовых и ссриесных двигателей возможно понижать число оборотов двигателя до 75%, а для шунтовых двигателей еще и повышать число оборотов на 15, 50, 100 или 200% от поминальной скорости вращения двигателя при условии, что крутящий момент или мощность остаются постоянными за все время процесса регулировки. Если при возрастании скорости двигателя крутящий момент также возрастает, то предел регулировки скорости=15%. В случае асинхронных двигателей с контактными кольцами понижение числа оборотов при помощи регуляторов возможно до 25, 50 и 75% от номинального, причем данная регулировка должен быть возможна и при пониженном до 80 % от номинального крутящем моменте. Конструкция регуляторов поля должен быть такова, чтобы их ни в коем случае нельзя было выключить и тем самым разорвать цепь возбуждения, во избежание разноса двигателя. При расчете регуляторов тока главной цепи двигателей, предполагая, что вращающий момент (а следовательно и сила тока) постоянны, получают следующие соотношения для двух соседних ступеней:
Ekn = E v + IRV=Εν_Λ 1 Rv^, откуда следует, что
Екп=°^Екп IRv=<-γ~Екп + IRу+1и окончательно
II i 41 и,— w ]. ]
В V ω8-ων
где E, R и пс индексами и>+1 означают противоэлеитро-двпжущую силу, сопротивление цепи якоря и угловую скорость вращения для r-той и v+1-oii ступени, а <us — синхронная скорость вращения. Задаваясь изменением Скорости вращения при переходе с одной ступени Г. па другую, легко подсчитать необходимые для этого сопротивления ступеней. Расчет этих Р можно производить также и графически, применяя для этого диаграммы Гбргеса, оппсагшые при расчете пусковых Р., в особенности при изменяющемся со скоростью вращения крутящем момепте. При этом для удобства рекомендуется сначала построить кривую оборотов двигателя при помощи магнитной характеристики и нанести па ней желаемые ступени скорости вращения. Для понижения скорости вращения двигателей можно пользоваться также и пусковыми Р., только в этом случае последние должен быть рассчитаны на продолжительную нагрузку, а получающиеся при этом ступени скорости вращения м. б. найдены непосредственно по диаграммам Гбргеса. Расчет регуляторов поля для шунтовых двигателей с целью поддержания постоянства числа оборотов в пределах от холостого хода до полной нагрузки м. б. произведен графически, если известны кривые зависимости магнитного потока двигателя (или что то же, эдс) при холостом ходе и при полной нагрузке. При расчете регуляторов для повышения числа оборотов шунтовых двигателей обычно принимают, что при переходе с одной ступени Р. на другую скорость двигателя изменяется в одном и том же отношении, после чего нетрудно подсчитать ступени Р.,
в)Специальные типы Р. Что касается регулирующих Р. для различных специальных целей, то расчет их, часто в достаточной мере сложный, зависит от их назначения и требуемого характера изменения величины, к-рую они предназначены регулировать. Сюда относятся: регуляторы для заданного тока возбуждения для сериес-машин, регуляторы силы света ламп накаливания, регуляторы для дуговых ламп, Р. с экономии, использованием материала, Р. для зарядки аккумуляторных батарей, Р. для грубой и тонкой регулировки, Р. со скользящим контактом и т. д., указания относительно расчета которых можно найти в прилагаемом списке литературы. Схода же м. б. отнесены и нагрузочные Р., расчет которых впрочем весьма прост.
Лит.: Кулебакин В. С., Пусковые и регулирующие реостаты, Ы.—Л., 1929; Jasse E., Anlass-u. Begclwiderstande, 2 Aufl., В., 1924; Garrard С., Electric Switch a. Controlling Gear, 3 ed., N. Y., 1927; James H., Controllers lor Electric Motors, N. Y., 1927; RzihaE.u. Seidener J., Starkstromtechnik, Taschenbuch f. Elektrotecbniker, В. 1,7 Aufl., B., 1930; S c h u p p E.,ElektrischesSchaltzeug, B., 1927;E d 1 e r It., Schalterbau, В. 1, Lpz., 1923. А. С.нневич.
PE О СТАТИЧЕСКАЯ МАШИНА, емкостный преобразователь тока, позволяющий производить самые разнообразные превращения тока в отношении его напряжения и частоты при помощи зарядки и разрядки системы конденсаторов. Первоначально этот прибор служил для опытного доказательства тождества гальванич. и статич. электричества, т. к. после преобразования Р. м. (из постоянного в постоянный же) ток 800-элементной аккумуляторной батареи Планте давал искру 4 см, подобную искре от электростатической машины. Конденсаторы Р. м. Планте в виде т. и. досок Франклина, числом 30—40, состояли из слюдяных или эбонитовых пластинок площадью каждая по 300 см2, оклеенных с обеих сторон станиолем. При помощи специального коммутатора, приводимого в быстрое движение зубчатой передачей (первоначально просто рукою), конденсаторы соединялись то параллельно то последовательно; зарядка производилась при параллельном соединении, а разрядка—при последовательном, вследствие чего напряжение повышалось. Планте не взял патента на изобретенную машину: поэтому она не сделалась предметом производства. В поисках за источником высокого напряжения для рентгеновых трубок Траубридж (Trowbrige, 1898) обратился к полузабытой Е. м. и построил машину на 1 200 kV, дававшую искру в 150 см. Преимущество емкостного преобразования видно из того, что при */3 J-P эта машина производила эффекты, для которых при пользовании катушкой Румкорфа требуется 30 IP. Подобные приборы выгодно отличаются от других источников постоянного тока (например выпрямителей и электромагнитных преобразователей) отсутствием потерь на искрообра-
зование, джоулево тепло, магнитный гистерезис и токи Фуко. В связи с намечающимся в настоящее время стремлением перевести силовые передачи на постоянные токи высокого напряжения и невозможностью пользоваться при этом электромагнитными трансформаторами, Р.м. получают данные на успех и за пределами лабораторий и потому требуют к себе особого внимания.
Подобные приборы и теория их разработаны Б. Л. Розингом (1926—27 гг.). Общая электрическая схема этих преобразователей представлена фигура 1. Система последовательно соединенных конденсаторов снабжается отводами от местсо-
. и и и 11 и i п и ii.li и еДинения; отводы эти 1МффффффпМг идут к контактам ί1;
ί», ί,. ., ί„, κοτο-
3 Фигура 1.
рые соприкасаются со щетками А и В, двк-А в жущимися непрерыв но относительно этих контактов. Соприкосновение щеток и контактов конструктивно осуществляется либо движением контактов либо движением щеток. Соединения производятся с двумя последовательными контактами таким образом, что при вращении коммутатора щетки электрически соединяются с обкладками каждого из последовательно соединенных конденсаторов одной и той же емкости, а по прохождении всего ряда возвращаются к первому конденсатору. Щетки присоединяются к источнику преобразуемого тока, тогда как преобразованный ток берется с каких-либо двух обкладок конденсаторов с помощью отводов 2 и 3, причем (если преобразуется постоянный ток) напряжение будет тем больше, чем дальше отстоят друг от друга эти обкладки в ряде конденсаторов. Подобные приборы выполняют: 1) задачу о повышении или понижении напряжения постоянного тока при преобразовании его в постоянный; 2) то же—в отношении переменного тока, причем частота м. б. изменяема, и 3) задачу о преобразовании постоянного тока в переменный, и наоборот, с изменением при этом напряжения. Регулирование высокого напряжения более грубо м. б, производимо путем присоединения отводящих проводов к той или другой паре обкладок, а более тонко—путем изменения напряжения источника (реостатом, потенциометром).
При преобразовании постоянного тока в постоянный номинальная эдс Εό преобразованного тока равна эдс источника, умноженной на число конденсаторов п, находящихся между отводами. Однако при расходовании энергии эдс падает, т. к. за время т, преходящее между двумя последовательными зг -рядками одного и того же конденсатора, пг-дает разность потенциалов этого конденсатора. Если Ε’ά—наивысшая разность потенциалов, получающаяся в приборе, а 2?»—наиниз-шая, Е’—эдс источника, С—емкость отдельного конденсатора, п—число конденсаторов, a R—сопротивление внешней цепи, то приближенно
Еα= юЕ (i - -jp д^-);
ΕΪ7ηΕ(ί-ψ^)·
Т. о. действительная средняя эдс Е" повыша теля и колебание ее ΔΕ" ветственно:
выражаются соот-
W-пЕЩ
Преобразованный ток может рассматриваться: как сумма постоянного с напряжением Е” и переменного с амплитудою ΔΠ" и периодом т. В практич. осуществлении это дает например (при и=10, т= 1/500 ск., R=ΙΟ5 2, С=V. μ-F) Н"==0,8Еп, ΔΗ"= 2,5% от Е" при частоте 500.
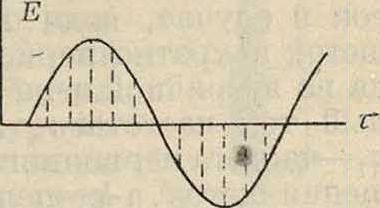
Подсчеты в случае преобразования переменного тока основаны на том, что распределение напряжений на последовательных конденсаторах представляет в пространстве изменение напряжения источника во времени. Если для простоты сначала рассмотреть случай, когда время полного оборота коммутатора в точности равно периоду источника, а напряжение с машины не снимается, то напряжения в конденсаторах можно считать стационарными. Поэтому преобразованная номинальная эдс Εό при синусоидной волне источника (фигура 2) выражается:
и/2, п/2
По=2 fc-EoSinf fc=2f-ijfcfsinffc.
1 1 При весьма значительном п можно считать
π
Εό=™ J·sin а: dx=^ Е^п. о
Здесь Εό вообще неравна амплитуде Е эдс генератора переменного тока, присоединенного к щеткам; в нек-рых случаях Поможет оказаться превосходящей П в силу резонанса колебаний в системе генератор—конденсатор, т. к. можно считать цепь генератора (с самоиндукцией L, сопротивлением R и угловой частотою со) замкнутой на один конденсатор Р. м. (с емкостью С); поэтому
Н=Е
Фигура 2.
to С
]Д2+(иь__1)2 1
При условиях coL=^ и ω <cr получается Н>Н.
Действительная эдс Н", то есть при отдаче тока машиною, менее номинальной Εό, и притом периодически несколько изменяется. В среднем
Ε"=Εό (t-4^c)’
где г—сопротивление внешней цепи, па которую работает Р. м. На основании предыдущих ф-л
A
niuCR
1-
πη 4n«iC1 ’
где А—амплитуда колебаний эдс преобразуемого тока. Амплитуда колебаний около среднего значения Е"
ТР„_ ЕП
4ТО2С2Л
В примере, взятом из практики, числовые данные были: A=80 V. п=24, ω=300 пер/ск.; C=72p.F, Λ=1 500 2, г=10е 2; в соответствии с ними Н"=23 600 V, ΔΗ"=280 V, то есть 1,18% от Н".
При помощи Р. м. напряжение постоянного тока может не только повышаться, ной понижаться, т. ч. при помощи двойного преобразования возможно осуществить передачу энергии постоянным током. Такая передача была осуществлена Б. Л. Розингом на опытной линии в 2 992Ω, эквивалентной линии передачи ок. 75 км. Первичное напряжение могло изменяться от 0 до 240 V, а повышение было до 1 000—2 000 V. Переданная энергия до 12 W. Как выяснилось из этих опытов, наибольшая отдача получалась при больших полезных сопротивлениях ок. 3 000 Ω; ей соответствовал кпд, равный 67%, т. ч. в каждой Р. м. потери были около 17%. Построенные Розингом преобразователи рассчитаны на малую мощность (до 20 W); но при использовании электролитич. конденсаторов можно по мнению изобретателя увеличить эту мощность до сотен kVA. Р. м. липа Розинга могут давать также переменный ток в случае, если время полного оборота щеток некратно периоду первичной эдс. Тогда во вторичной цепи Р. м. возникает переменный ток частоты v, причем — /сиг, где щ—частота первичного тока, щ—частота вращения щеток, а /с—целое число единиц в отношении периода тока к периоду вращения щеток.
Лит.: Роз инг Б.Л., Емкостный повышатель напряжения постоянного тока, «Труды ленинградской экспериментальной электротехнич. лаборатории». Л., 1926, вып. 4, етр. 77—81; его ж е, Емкостный преобразователь переменно-постоянного п постоянного тока, «Электричество», М., 1930, 13, стр. 559—562; Η о 1 г W., -«Poggend rfls Annalen», Lpz., 1875, В. 155, p. 639; PlanU C., «La Nature», P., 1877, аппёе 5, sem. 1, dec., p. 13;P 1 an t 6 C., Leselfetsdu c urant ilectrique produits par la machine rhfiostatiijue, ibid., 1886, sem. 1, p. 149 — 150; Guillaume Ch. Ed., La machine rhOostatique, ibid., 1898, sem, 1, p. 235; Frick’s, Phvsi-kalische Technik, 7 Aufl., B. 2, Abt. 1, n. 155 — 156, Brscivw. 1907. П. Флоренский.
PE OTA H, группа металлических медно-мм-ково-никелево-марганцевых сплавов (иногда с присадкою железа) серебристого цвета и высокого электросопротивления, отличающихся известной химич. стойкостью. По своим свойствам Р. стоит между группою нейзильбера (смотрите), никелина (смотрите) и Константина (ем.), с одной стороны, и манганина (смотрите),—с другой. В таблице приведены по П. Ч. Томпсону (1916 год) данные об уд. сопротивлении тройных сплавов Cu-Zn-Ni с присадкою Мп.
Удельное сопротивление тройных сплавов Cu-Zn-Ni.
| С о д e р ж | а н и е, | % | УД. сопротивление, | ||
| Си | Ni | Zn | МП | ДО
отжига |
после отжига при 590° |
| 60,6 | 7,62 | 31,7 | 0,0 | 22,2 | 18,4 |
| 66,2 | 7,80 | 31,8 | 0,25 | 18,3 | 16,6 |
| 61,8 | 16,4 | 21,7 | 0.0 | 30,2 | 30,1 |
| 61 2 | 15,5 | 23,2 | 0.25 | 27,5 | 27,2 |
| 61,6 | 22,4 | 15.85 | 0.0 | 32,6 | 33,0 |
| 61,6 | 19.6 | 18,5 | 0.25 | 29,5 | 31.6 |
| 57,7 | 17,4 | 21,7 | 0.0 | 27,5 | 27,0 |
| 54.3 | 15,75 | 29,7 | 0.25 | 27,7 | 28,3 |
| 56,2 | 16 3 | 27,6 | 1.5 | 30.4 | 30,8 |
| 61,2 | 28,6 | 9.8 | 0,0 | 41,5 | 41,0 |
| 60 4 | 27,9 | 11,4 | 0,25 | 38.5 | 40,0 |
| 60.9 | 23,7 | 13,15 | 1,5 | 38,5 | 40.0 |
Сравнение этих данных с подобными лее данными К. Фюснера для двойных сплавов Cu-Ni позволяет установить, что в двойных сплавах с содержанием никеля до 25% замена части меди цинком ведет к повышению электрич. сопротивления (В. Фойгт, С. Ф. Жемчужный и С. А. Погодин). Т. о. для реостатных металлов тройная система представляет нек-рое преимущество перед двойной как со стороны повышенного сопротивления, так и в отношении дешевизны и легкости производства. Не содержащий железа Р. называется просто Р. или P. I, а железосодержащий—P. II. Реотан характеризуется составом (в %): Си 84, Zn 4, Μη 12, аР. II—составом; Си 52, Zn 18, Ni 25, Fe 5. Существуют также варианты последнего состава, как например Си 53,28; Zn 16,89; Ni 25,31; Fe 4,46; Μη 0,37. Для этого последнего сплава уд. сопротивление составляет
52,5 μΩ-сл», тепловой коэф. 0,00041, уд. в 8,7. Другой вариант реотана, германского производства, марки CN, обладает уд. сопротивлением 47 |л2-ел1, при тепловом коэфициенте его 0,00003 и удельном весе 8,8; £°я., Р. марки CN 1 274°, при удельном сопротивлении 50 μΩ-ejn уд. в 8,90 (а наивысшая допустимая £° нагрева 500°); при уд. в 8,60 1 135°, а наи высшая допустимая t° нагрева 400° (уд. сопротивление 50 μΩ-cjn). Термоэдс в отношении к меди в последнем случае 13,80 |j.V/°C. Длительного нагрева Р. не выносит, хотя он и более стоек, чем никелин и нейзильбер. От нагревания, как показали опыты К. Фюснера (1891 г.), все эти сплавы становятся хрупкими и несколько увеличиваются в объёме. Поэтому применение Р. возможно только в тех случаях, где нагрев длится короткое время, как например в пусковых реостатах. В измерительной технике применение Р. тоже ограничено в виду значительности теплового коэф-та электросопротивления и сравнительно большой термоэдс в отношении меди.
Лит.: Жемчужный С. Ф.п Погодин С. А., Сплавы для эчектрнческнх измерите шных и нагревательных приборов, Л., 1928; Voigt W., «Ztschr. f. anorg. u. allgem. Chemie», Lpz., 1922, B. 120, p. ЗОя; I ii s s n e r K., «ETZ», 1891, B. 12, p. 250; M erica P., Miscellaneous«AUoys of Nickel, «Chemical a. Metallurgical Engineering», 1921, v.24, p. 649; JarusE. G., 1001 Alloys Formilas, N. Y., 1927; T о m p s ο n P. C.,
*Journ. of the Institution of Electrical Engineering», 1916, v. 54, p. 222. П. Флоренский.