 > Техника, страница 78 > Рудничный подъем
> Техника, страница 78 > Рудничный подъем
Рудничный подъем
Рудничный подъем, подъем по вертикальным выработкам на дневную поверхность добытого полезного ископаемого и пустой породы, а также спуск и подъем людей,
ратуры. Весьма благоприятным для вскрытия перемычек обстоятельством считается также невысокое содержание в упомянутых пробах метана и других чатых газов.
Существует два способа вскрытия пожарных перемычек: 1) работа в направлении струи свежего воздуха заключается в том, что предварительно обеспечивают тем или иным способом обильную подачу к вскрываемой перемычке свежего воздуха и отвод испорченного, и под защитой такой вентиляции производят вскрытие перемычки; 2) ш л го-
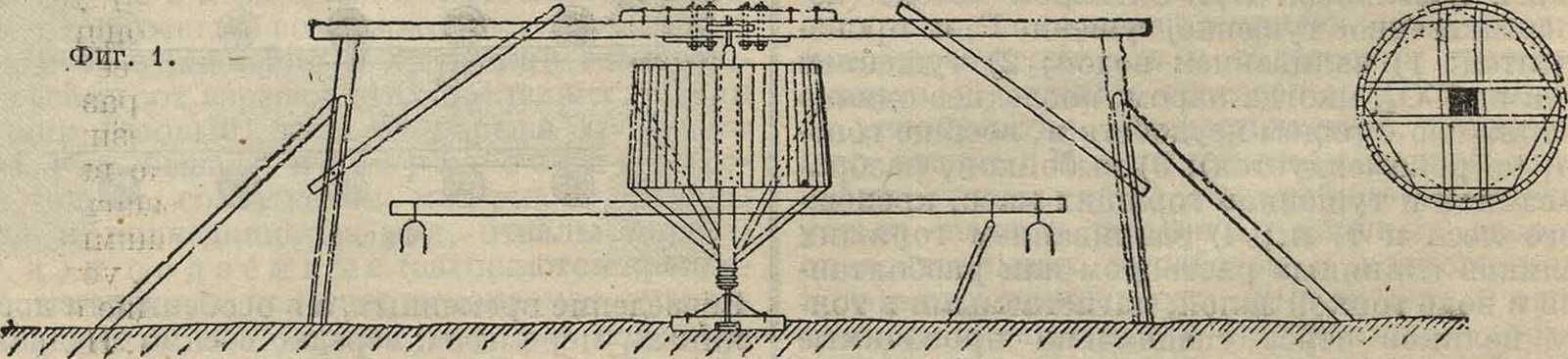
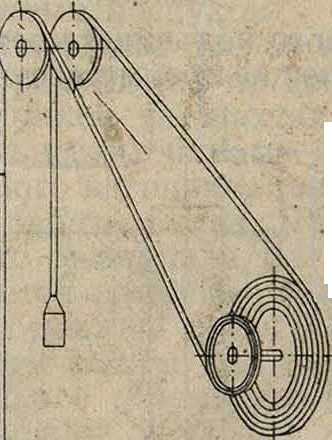
материалов, машин и прочие Различают подъем мускульной силой и механич. силой; первый способ применяется при проходке шурфов, при проходке, иногда и эксплуатации, неглубоких шахт небольшого сечения; второй способ—при проходке и эксплуатации шахт всяких размеров. Ручной подъем производится обыкновенно до глубины 2—30 метров с помощью воротка в ведрах, бадьях и ящиках; при подъеме с большей глубины пользуются конным воротом, устройство которого ясно видно из фигура I. Бадьи для механического подъема
изготовляются клепаными из железа; форма их—цилиндрическая, конусообразная, бочкообразная и тому подобное. На фигуре 2 показано устройство бадьи цилиндрического сечения.
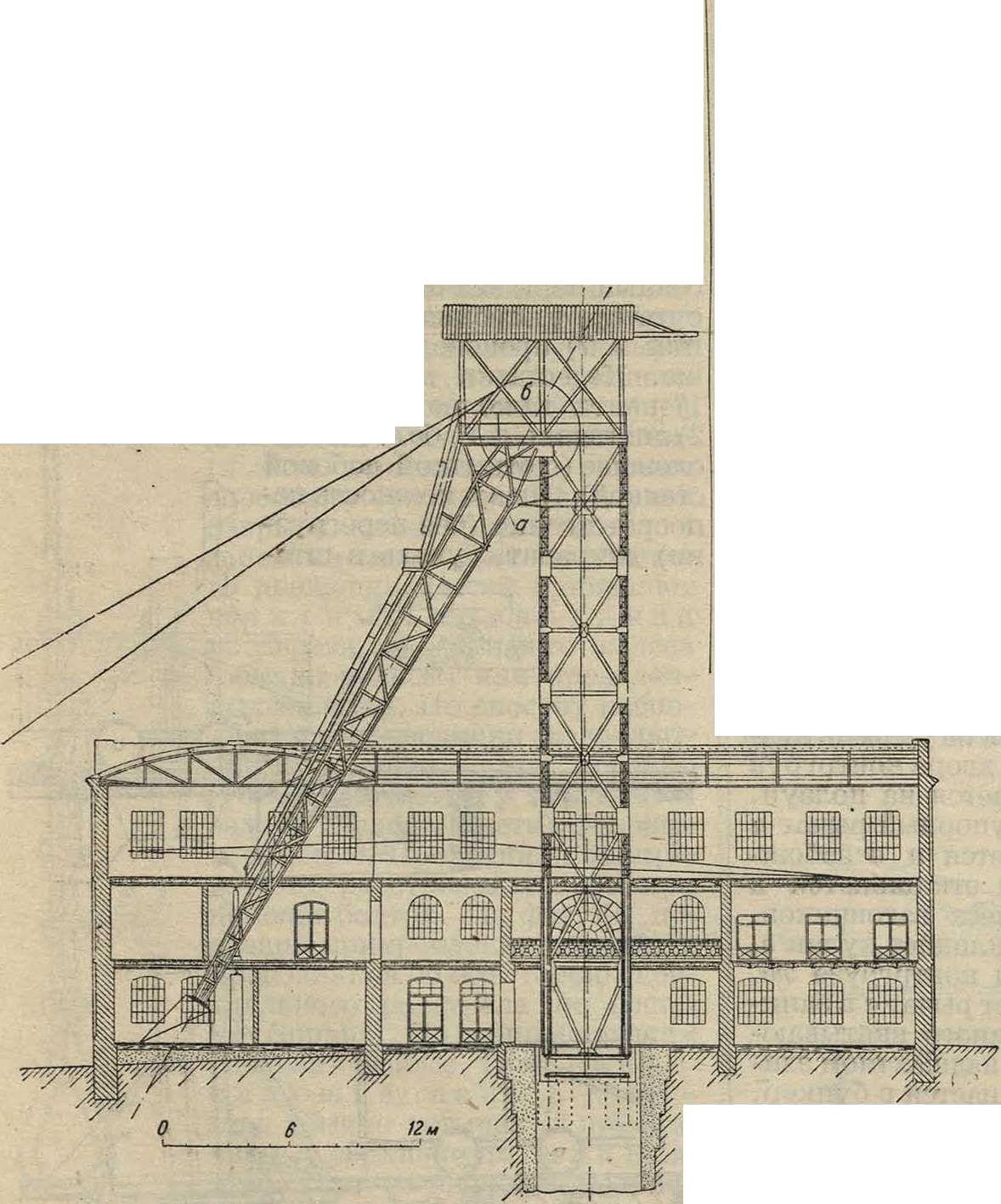
Р. п. в эксплоатацпониых шахтах, так называемым шахтный подъем, при все увеличивающихся глубине шахт и количестве добываемого полезного ископаемого является одним из главных факторов разработки месторождений шахтами. Шахтная подъемная установка состоит из копра а (фигура 3) с укрепленными на нем двумя направляющими шкивами б, подъемной машины с барабаном для навивки канатов и прикрепленных к ним подъемных сосудов. В соответствии с этим шахтные подъемные установки классифицируют по следующим четырем признакам: по роду подъемных сосудов, по органу навивки каната, по способу уравновешивания системы подъема и по роду двигателей.По первому признаку шахтный подъем разделяется на подъем в клетях и подъем в скипах. В первом случае ископаемое, доставленное от забоя к шахте в вагончиках, не перегружается, а выдается на поверхность в тех же вагончиках; во втором случае ископаемое на рудничном дворе перегружают в особые ящики,так называемые «скипы», и в них выдается на поверхность.
Фигура 2.
Фигура 4:
Псдъем в нлетях. Различают два видаклеть-евого подъема: подъем в обыкновенных кле-тях (при нем груженые вагончики выкатывают из клети и вместо них вкатывают порожние вагончики) и в опрокидывающихся клетях (груженые вагончики разгружаются путем опрокидывания вместе с клетыо).
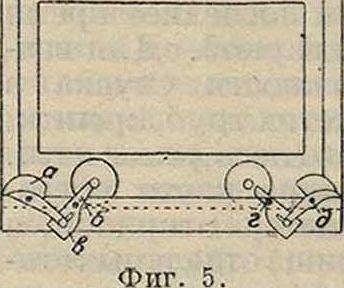
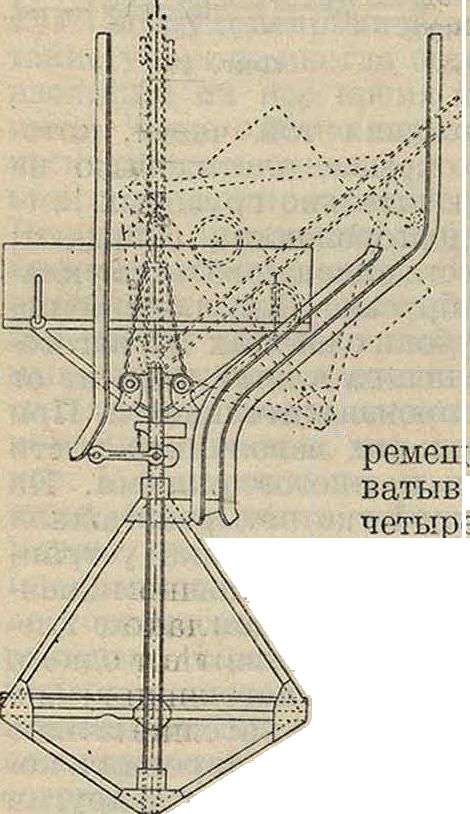
II о д, е м в о б ы к н о в е и н ы х к л е т я х. Клети устроены след, образом. Рамы из про фильного железа скрепляютсяв прочный остов профильным же железом. Боковые стенки скрепляются полосовым или угловым железом. Соединение отдельных частей производится клепкой, а в последнее время и сваркой. Для возможности спуска в клетях труб,крепежного леса,рельс ит.п. крыша клети устраивается откидной, а днища отдельных этажей (в многоэтажных клетях) съемными. В клетях, предназначенных для спуска и подъема людей, длинные стороны обшивают перфорированным листовым железом или проволочной сеткой. Высота этажа в таких клетях должна быть не менее 1,8 метров Верхний этаж клети должен тР быть так устроен, чтобы от пола клети до наинизшего положения той части, которая выдвигается в крыше клети, было не менее 1,9 метров В исключительно грузовых клетях эти меры предосторожности отпадают; кроме того в них вместо сплошного пола укладывают отдельные брусья. Для облегчения веса клетей при глубоких шахтах их изготовляют из стали. Величина клетей зависит от сечения шахты и ее производительности. При подъеме зараз нескольких вагончиков клети м. б. одноэтажными и многоэтажными. На фигуре 4 показано устройство четырехэтажной клети. Клети для одного вагончика устраивают редко (на металлич. и небольших каменноугольных рудниках). В каждом этаже клети устанавливают от одного до четырех вагончиков, паи-чаще но два вагончика либо рядом (клеть широкая и короткая) либо один за другим (длинная и узкая). Для задерживания вагончиков в клети во время ее движения применяют различные устройства: железные скобы, закрывающие выход из клети,особые рычаги с пальцами, зацепляющими вагончик за его ребро, устройства, задерживающие ось или колесо вагончика. На фигуре 5 показан один из видов такого устройства: педаль а и задержка б с противовесом в, связанные между собой кулисным соединением, вращаются около неподвижных осей гиб. При вкатывании вагончик нажимает на педаль, вследствие чего задержка опускается, пропуская вагончик в клеть, а затем противовесом приводится в прежнее положение. При выкатывании вагончика нажимают ногой на педаль; когда второй скат вагончика подойдет к задержке, в этот момент
Фигура з. первый скат находится на педали и вагончик свободно выкатывается из клети.
Подъем в опрокидывающихся клетях. Опрокидывающиеся клети состоят из наружной и внутренней частей, соединенных между собою шар-, ._
нирами.Наружная часть в виде вертикальной рамы с двумя поперечными балками подвешивается к подъемному канату. Внутренняя часть состоит из платформы с вертикальными боковыми стенками в виде буквы L. Во время опрокидывания наружная часть сохраняет свое вертикальное положение, а внутренняя вращается около шарнира. Опрокидывающиеся клети изготовляются одноэтажными (только для одного вагончика) для обыкновенных вагончиков и для вагончиков с откидной лобовой стенкой; первый тип применяется редко, а именно, когдаприходится использовать существующий парк обыкновенных вагончиков. Второй тип показан на фигуре 6. Для удержания вагончика в клети при движении и опрокидывании существуют особые устройства, одно из которых изображено на фигуре 7. Вагончик по рельсам, уложенным на наклонном полу клети, докатывается до упорного рычага а; под дном клети расположен вал б, на котором могут пе-аться захваты в, ох-дащйе ободы всех ж колес вагончиков. Приемная площадка рудничного двора оборудована кулаками г с противовесом д и ползуном с тягой е. При опускании клети на уровень руд-нично го двора контргруз ою опирается на ползун, причем упорный рычаг а наклоняется и освобождает ось ската, а захваты в отклоняются в сторону и освобождают колеса вагончиков. Вагончик выкатывается и отклоняет кулак г, а ползун выдвигается из-под контргруза ою, к-рый опускаясь перевешивает рычаг а в запирающее положение для сменного вкатывающегося в клеть вагончика. В надшахтном здании уголь из вагончика высыпается в бункер. Производительность подъема зависит от емкости вагончика, глубины шахты, скорости подъема и времени погрузки и разгрузки клетей. В табл. 1 и 2 приведены характеристика и производительность подъема в опрокидывающихся клетях.
В США допускается до 160—180 подъемов в час. Преимущества подъема в опрокидывающихся клетях по сравнению с подъемом в обыкновенных клетях следующие: 1) полная автоматичность разгрузки угля и надежность действия, 2) уголь попадает непосредственно в сортировку (отсутствует откатка в надшахтном
Таблица 1. — Характеристика подъема в опрокидывающихся клетях.
| Глубина подъема
Б м |
Время чистого подъема в ск. | Время разгрузки и нагрузки в ск. | Полное время подъема в ск. | Число подъемов ! в 1 ч. i |
| 50 | 25 | 10 | 35 | 103 |
| 100 | 30 | 10 | 40 | 00 |
| 150 | 35 | 10 | 45 | 80 |
| 200 | 38 | 10 | 48 | 75 |
| 250 | 42 | 10 | 52 | 69 |
| 300 | 45 | 10 | 55 | 65 |
| 350 | 48 | 10 | 58 | 62 |
| 400 | 52 | 10 | 62 | 58 |
| 450 | 55 | 10 | 65 | 55 |
| 500 | 58 | 10 | 68 | 53 |
Таблица 2,—П ро извод п тельпость подъема в опрокидывающихся клетях (в ч.).
| Емкость вагончика |
Глубппаподъема в |
м | ||||||||
| 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | |
| (т угля) | ||||||||||
|
Производительность подъема |
1 * | |||||||||
| 0,75 | 77 | 68 | 60 | 56 | 52 | 49 | 46 | 43 | 41 | 40 |
| 1,0
1.5 |
103. | Ό0 | 80 | 75 | 69 | 65 | 62 | 58 | 55 | 53 |
| 182 | 135 | 120 | 112 | 103 | 98 | 93 | 87 | 83 | 79 | |
| 2,0 | 206 | 1S0 | 160 | 150 | 138 | 130 | 124 | 116 | 110 | 106 |
| 2.5 | 258 | 225 | 200 | 188 | 172 | 162 | 155 | 145 | 138 | ш |
| 3,0 | 309 | 270 | 240:
1 |
225 | 206 | 195 | 186 | 174 | 165 | 159 |
отделении), 3) надшахтные сооружения более легки, компактны и дешевы, 4) устраняется смена вагончиков в надшахтном здании, 5) вагонный парк значительно сокращается, б) отсутствуют опрокидыватели в надшахтном здании и 7) производительность подъема больше. Недостатки этого подъема следующие:
1) клети тяжелее и дороже обыкновенных,
2) двигатель должен быть более мощным, 3) вагончики
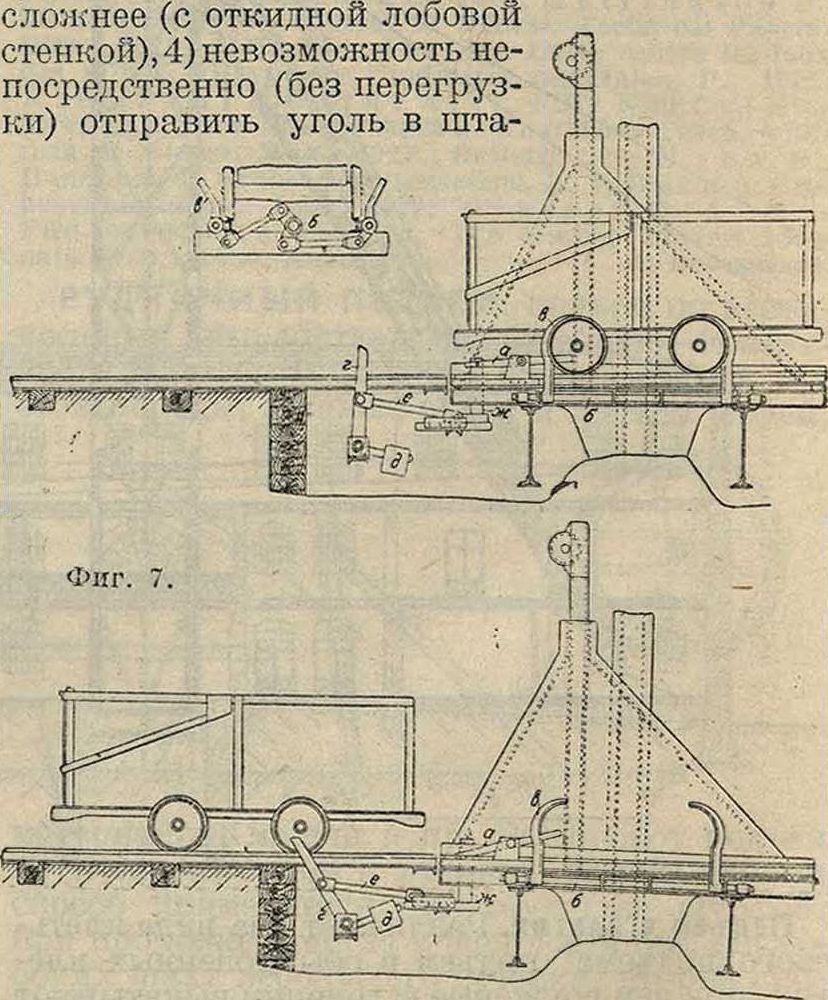
беля, 5) опасность подъема людей и необходимость вследствие этого устройства специальных посадочных площадок ниже приемной площадки и особых автоматически действующих приспособлений, гарантирующих невозможность опрокидывания людей в бункер.
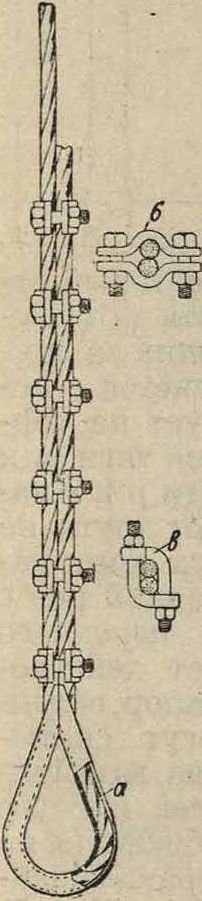
Оборудование клетьевого подъе-II а. Соединение каната с клетью производится при посредстве петли, составленной из его же конца. Загнутый вверх конец каната должен прикрепляться выше петли к телу самого ж;е каната зажимами. Петля по жо-лобу огибает вставленный в нее диск, остро оттянутый вверх и заполняющий пространство петли. Через отверстие диска проходит болт, к к-рому подвешивается серьга, к последней подвешивается штанга и цепи, соединяемые с клетью. На фигуре 8 и 9 показаны соединения, прп-
Фигура 8.
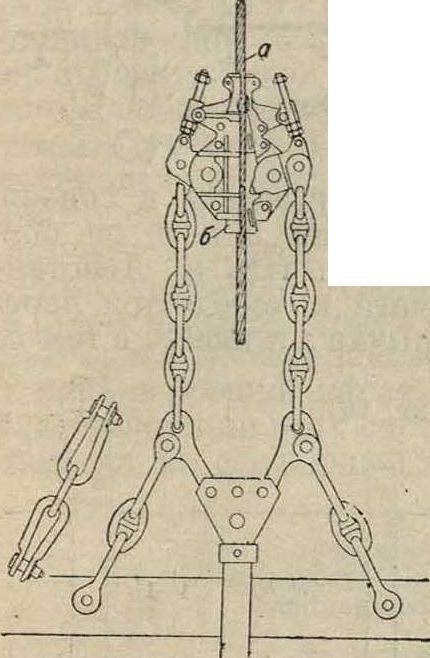
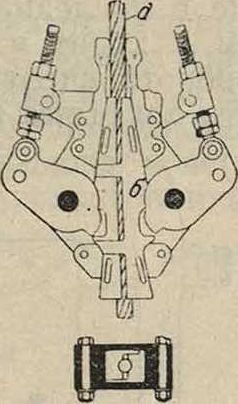
меняемые за границей. Нижняя часть каната а без изгиба входит в зажимную буксу б; в канатном узле (фигура 9) канат вкладывается в обойму а, изготовленную в виде железного загнутого желобка; защемление загнутой частиj каната с прямой его частью производится или зажимом б или угловыми пинтами в Приготовленный т. о. конец каната присоединяется к клети при помощи цепей (обычно их 4) или главной штанги или одновременно обоими способами (фигура 4). На случай разрыва цепей укрепляются 4 запасные цепи. Для безопасного движения клетей применяют шахтные проводники из дерева, профильного железа (обычно рельсы) или проволочных канатов. По способу расположения проводники разделяются на головные, или лобовые (устанавливаются у передней и задней стороны клети), боковые и угловые. Проводники прикрепляют к расстрелам, гл. обр. при помощи болтов. На фигуре 10 показано прикрепление рельсовых проводников по обе стороны центрального расстрела по системе Бриара. По направляющим скользят особые, т. н. н а п р а-вляющие, лапы в количестве обычно четырех (2 привинчены к верхней раме и 2 к нижней). Для уменьшения толчков Фпг. 9. и предохранения проводников от слишком быстрого изнашивания в старых, потерявших первоначальную вертикальность, шахтах применяют лапы с каучуко-вой прокладкой или со стальными пружинами; иногда в этих случаях вверху клети укрепляют ролики. Канатные направляющие устанавливают в шахтах малых и средних глубин; при больших глубинах применение их опасно вследствие их провисания и раскачивания.
Для необходимого натяжения канатов нижние концы их пропускают через узкие отверстия в рамах и прикрепляют к этим концам грузы. Клеть движется или по четырем проводникам (по углам клети) или по трем.
Для установки клети на приемной верхней площадке применяют особые установочные приспособления, т. н. «кулаки».
Применение кулаков не обязательно при условии, если подъемная установка ткет помимо сигнализации устройство, не позволяющее машинисту преждевременно произвести спуск-подъем. Кулаки простого устройства изготовляют из кованого железа; они насажива- яются на два вала; при горизонтальном положении кушаки опираются на особые подкладки. При подъеме клети кулаки автоматически поднимаются клетыо и по проходе ее пада!< >т от собственного веса, принимая горизонтальное положение, после чего клеть опускается и садится на кулаки.
При спуске клеть должен быть предварительно немного приподнята, после чего кулаки открываются рыча-
Фигура 10.
гом, укрепленным па валу, соединенном с дру-гим валом тягами (другая пара кулаков). Пе-ущобство этого устройства состоит в том, что при каждом спуске клети нужен лишний маневр (предварительное приподнимание клети).
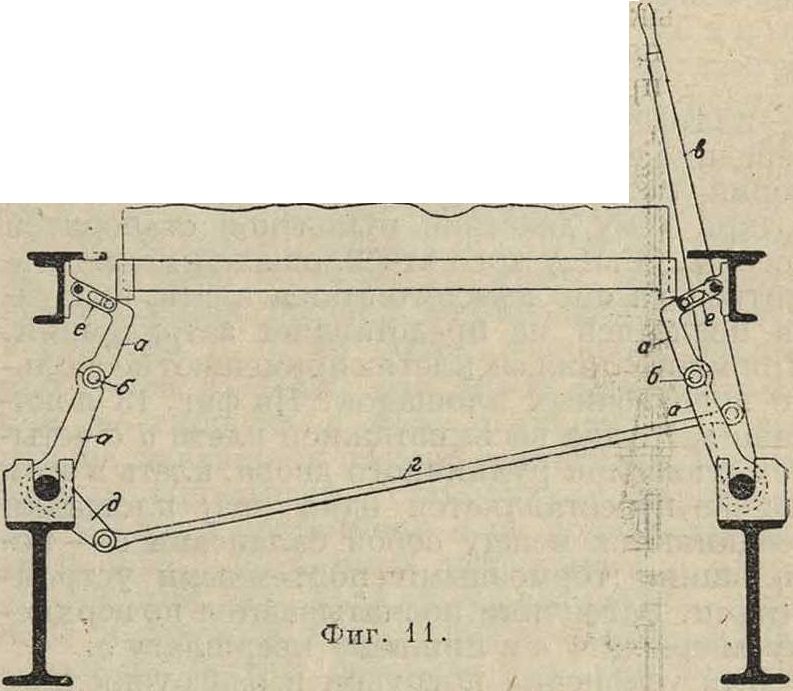
Для избежания этого применяют приспособления. которые могут оттягиваться назад в то время, когда на них стоит клеть. Одно из таких приспособлений (Westmeyer’a) дано на фигуре 11. Рычаги а вращаются на осях б; рукояткой в при помощи тяги г и плеча рычага
ό можно переместить рычаги а и освободить клеть; головки рычагов могут двигаться по салазкам в особых поддержках е. 13 последнее время в целом ряде проектов Шахтстроя применение кулаков исключено.
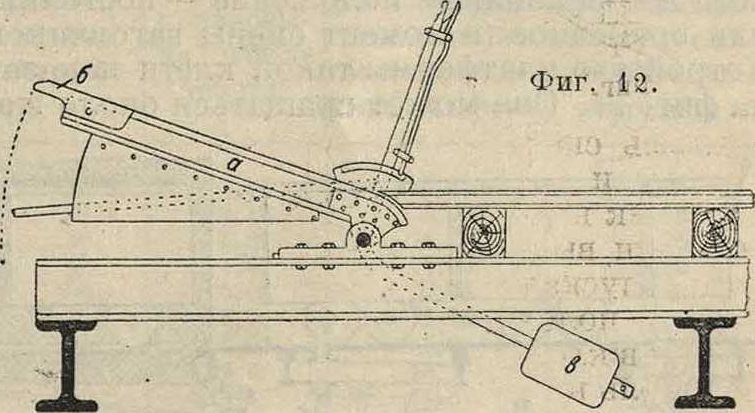
Нижняя клеть у рудничного двора вследствие удлинения каната и отсутствия кулаков может стать т. о., что дно ее не совпадет с горизонтом рудничного двора, что препятствует вкатыванию вагончиков в клеть. Для устранения последнего неудобства применяют качающиеся площадки (фигура 12);
Фигура 13.
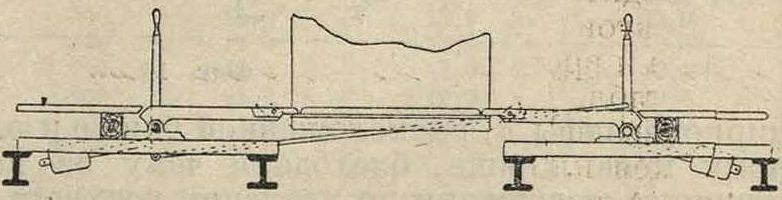
а—платформы, на которых уложены рельсы; передняя часть их б сделана поворотной; платформа уравновешивается противовесом в, благодаря чему действие рукояткой становится легким. В виду того что площадка может ложиться на дно каждого этажа клети, загрузка последней не представляет затруднений. При многоэтаяшыхклетяхприменяютнесколь-ко погрузочных площадок. На фигуре 13 показана загрузка восьмиэтажной клети а с четырех площадок рудничного двора; клеть в этом случае переставляется один раз; площадки соединяются между собой балансами б — небольшими тормозными подъемными устройствами. Вагончики подкатываются по верхнему квершлагу в и нижнему квершлагу г.
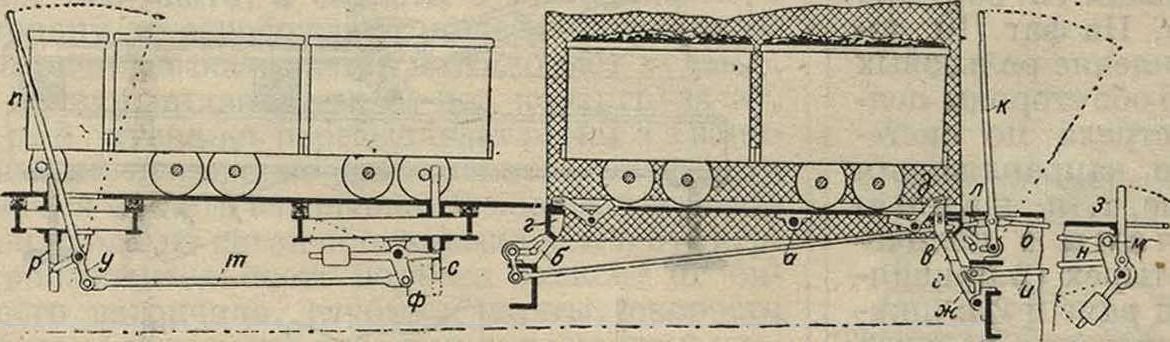
Для ускорения погрузки и разгрузки клетей и для экономии рабочей силы применяют особые вталкивающие или выталкивающие механизмы, а также т. н. уклоны. В последнем случае у рудничного двора проводят наклонные штреки, а дну клети придают такое же наклонное положение — постоянное или временное (в момент смены вагончиков). Устройство платформы такой клети показано на фигуре 14. Она может вращаться около шар лаки ж (спереди опускаясь, а сзади поднимаясь) и освобождают вагончик. Скатывающийся вагончик своей передней осью толкает рычаг з (находящийся на расстоянии двух длин вагончика от левого конца кулака д), соединенный тягой и с кулаком о/с; последний оттягивается назад и освобождает вспомогательную подставку е и задний тяжелый конец кулака д, к-рый падая принимает положение тормоза для следующего вагончика. Чтобы рычаг з не действовал на рычаг к ные с последним подхваты б. и.
Фигура 15-
и связан-г, он болтом м ходит в прорезе рычага н. Действие поворота вправо рычага к передается черее тягу о и рычаг н на рычаг з и вместе с тем на,
Фигура 14.
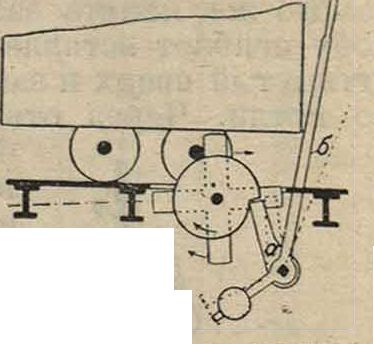
нирной цапфы а, расположенной ближе к одному краю днища, благодаря чему из наклонного положения по удалении подхвата б она автоматически возвращается в горизонтальное положение; наклонное ее положение обусловливается тем, что башмак в меньше башмака г; задерживающие колеса вагончиков кулаки д посредством вспомогательных подставок е садятся на вспомогательные ку тягу и и вспомогательный кулак о/с, к-рый оттягивается назад и освобождает путь для идущей вниз клети. Задержка следующих за двумя первыми вагончиков осуществляется с помощью рукоятки п, которая действует на тормозные рычаги рис при посредстве тяги т и коленчатого рычага уф; т. к. рычаги рис находятся друг от друга на расстоянии двух длин вагончиков, то всякий раз с освобождением переднего запора начинает действовать и задний запор, вследствие чего могут скатываться лишь два вагончика. Другое более простое устройство изображено на фигуре 15. На оси вращающейся четырехплечевой крестовины заклинена кулачная шайба; в кулак упирается собачка а, которая м. б. отодвинута рукояткой б. При вкатывании двух вагончиков (четыре оси) крестовина сделает полный оборот, и собачка вновь задержит следующую пару вагончиков. Механические толкатели состоят из цепей или канатов с укрепленными на них подхватами. Наиболее удобны кулачковые цепи, идущие снизу, так как они почти не мешают движению рабочих. Существует несколько систем ыеханич. толкателей—например сист. Heckel (фирмы Diisterloh),. электрический толкатель системы Gewerkschaft Eisenhiitte, Demag и др.
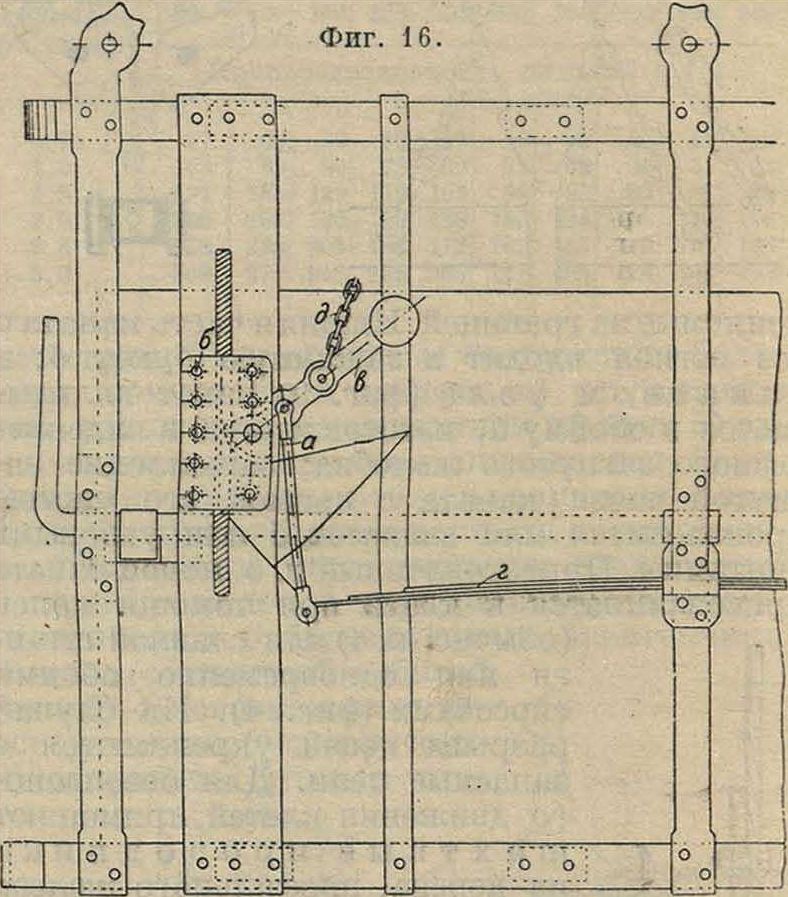
На случай разрыва подъемного каната для предохранения клетей от падения в шахту они снабжаются парашютами. Парашюты по действию захватов (кошек) делятся на парашюты врезывания (в проводник).трения и эксцентриковые (действующие одновременно и врезыванием и трением). Пример эксцентрикового парашюта для канатных направляющих приведен на фигуре 16. Эксцентриковая головка а помещена в обхватывающую канат коробку б; рычаг в головки на одном конце несет груз, другой конец соединен с пружиной г; этот рычаг подвешен на цепи д к серьге подъемного каната; при обрыве каната рычаг в под действием пружины и груза падает вниз; эксцентриковая головка зажимает направляющий канат, врезываясь в него. Классификация всех систем парашютов представлена на следующей схеме.
i
Парашюты для деревянных направляющих
Принцип врезывания
-Мюнцера
-Усдейтша
Фонтена
Принцип трения
Лессинга
-Кания-Кунца
Эксцентриковые
I
- Вите-Гранда —Герлях-Бемке
| Действие, | Действие, | |
| не связанное | связанное | |
| с клетью | с клетыо |
Парашюты для железных направляющих
I
Принцип трения
Мюпцера
- Либотта
---- Гиперсиля
| Действие, | Действие, | |
| связанное | не связанное | |
| с клетыо | с клетыо |
Парашюты для к а н а т н ы.х направляющих
Принцип Экецентри-
тренип новые
I I
Зольфриана --:- Парашют
Мюнцера I по фигура 16
Действие, связанное с клетью
Своевременная остановка клети в конце ее подъема при современных больших глубинах шахты и больших скоростях подъема имеет большое значение.Приспособления, предохраняющие от излишнего подъема клети (от пе-
реподъема), разделяются на устройства, действующие на клеть, и приспособления, влияющие на ход подъемной машины. К первым относится сближение направляющих (проводников) под верхней приемной площадкой; вследствие трения лап о проводники клеть останавливается. Чтобы клеть не упала в шахту (в случае поломки звеньев цепи от удара о шкив), устанавливают на соответствующей высоте копровые кулаки. Более целесообразным средством является приспособление для выключения каната (конструкция Haniel’a-Lueg’a). Указанные устройства применяются только в том случае, если электрическая подъемная машина не имеет двух автоматически действующих устройств (обязательных при максимальной скорости подъема людей выше 4 м/с к и грузов выше 6 м/ск), гарантирующих невозможность поднятия клетей под направляющие шкивы (например ограничители конечной скорости и концевого выключателя); для всех паровых подъемных установок сближение направляющих и устройство аварийных копровых кулаков обязательно. Для правильного управления подъемной машиной устанавливается указатель глубины. Он состоит из двух маленьких салазок, двигающихся по колонке вниз и вверх; положение салазок и скорость их движения соответствуют положению и скорости движения клети в шахте (в уменьшенном масштабе). Существуют и другие указатели глубины и скорости подъема. В чисто грузовых подъемных вертикальных шахтах наибольшая скорость V подъема должен быть не более величины, даваемой ф-лой v=I/аН, где Н—высота подъема в м, V—скорость в м/ск, а—постоянная величина, зависящая от рода двигателей. В ука- занных подъемных установках с паровыми двигателями постоянная а не должна превышать 0,5; в подъемных установках с электрическими двигателями без автоматич. останова постоянная а не должна превышать 0,525, а при автоматич. останове 0,75. Предельные скорости подъема людей приведены в таблице 3.
Таблица 3.—П одъемные скорости г (в м/с к) подъема людей в клет я х.
| Высота подъема Н в м | Установки с паровыми двигателями | Установки с электродвигателями без автоматического останова | Установки с электродвигателями с автоматическим остановом |
| 10 | 2,21 | 2,65 | 2,75 |
| 20 | 5,16 | 3,50 | 3,90 |
| 50 | 3,87 | 4,25 | 4,75 |
| 40 | 4,47 | 4,90 | 5,50 |
| 50 | 5,00 | 5,50 | 6,10 |
| 75 | 6,10 | 6,70 | 7,50 |
| 100 | 7,07 | 7,80 | 8,70. |
| 200 | 10,0 | 10,4 | 10,8 |
| 500 | 10,9 | 11,5 | 12,0 |
| 400 | 11,7 | 12,0 | 12,0 |
| 500 | 12,0 | 12,0 | 12,0 |
| 600 | 12,0 | 12,0 | 12,0 |
| 700 | 12,0 | 12,0 | 12,0 |
| 800 | 12,0 | 12,0 | 12,0 |
| 900 | 12,0 | 12,0 | 12,0 |
| 1 000 | 12,0 | 12,0 | 12,0 |
Здесьскорость v .вычислена по формуле v^VaH до высоты подъема, которая соответствует предельной скорости 10 м/ск, а выше по формуле v=8,3+0,017аЯ, которая дает несколько большие значения.
Т. Э. т. XIX.
28
Подъем в скипах. Конструкция скипов в настоящее время и самые скиповые установки имеют большое разнообразие. Различают скипы по способу нагрузки, по форме кузова скипа и по роду применения в вертикальных или наклонных шахтах. Классификация скипов представлена на следующей схеме.
Скипы.
I тип—опрокидывающийся II тип—разгружающийся (кимберлеевский) через дно (леплеевский)
| Для на | Для вер- | Для | |
| К ЛОННЫХ | тикальных | вертикальных | |
| шахт | шахт
1 |
шахт
1 | |
| Приз- | 1 1 · Приз- Бока- | Призма- | 1
Призма- |
| матич. | матич. лообр. | тич. фор- | тич. фор- |
| форма | форма форма | ма—скип | ма—скип |
| верти- | наклоня- | ||
| кальны ii | ющиися | ||
При скиповом подъеме в наклонных шахтах задние колеса скипа имеют более широкий обод (150—200 миллиметров), чем передние (75 миллиметров). На поверхности у разгрузочной площадки шахтные рельсы а (фигура 17) изогнуты; в месте перегиба прокладывают рельсы б с более широкой колеей, по которой продолжают катиться задние колеса скипа; передние колеса катятся по изогнутым рельсам в, благодаря чему скип принимает наклонное положение и содержимое его высыпается. Кузов описываемого скипа склепывается из котельного железа и может вращаться на оси г; на оси укреплена рама б; к кольцу ее прикрепляется подъемный канат. Боковые и передние стенки имеют толщину 8—12 миллиметров; дно и задняя стенка толщиной 10—16 миллиметров; они устилаются деревянными досками, обшитыми листовым н$елезом. Попе
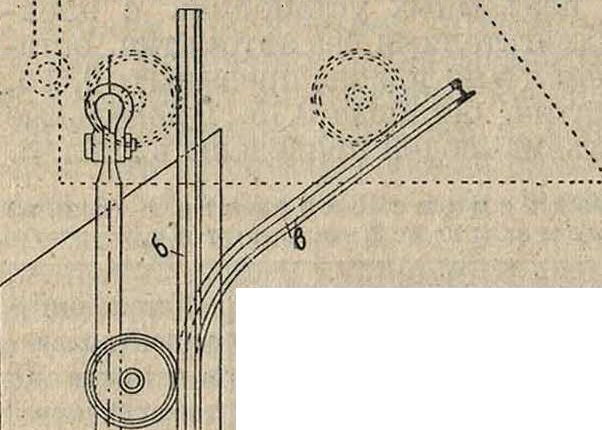
Фигура 17.
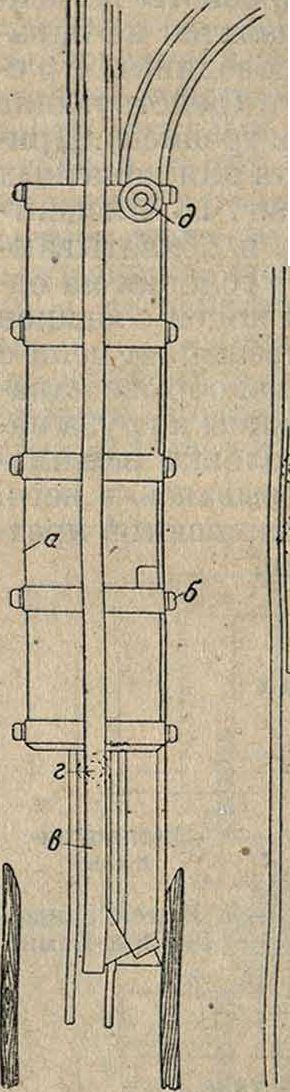
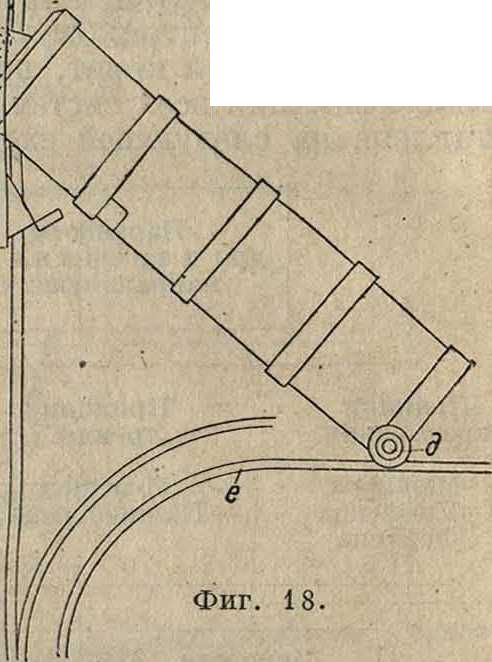
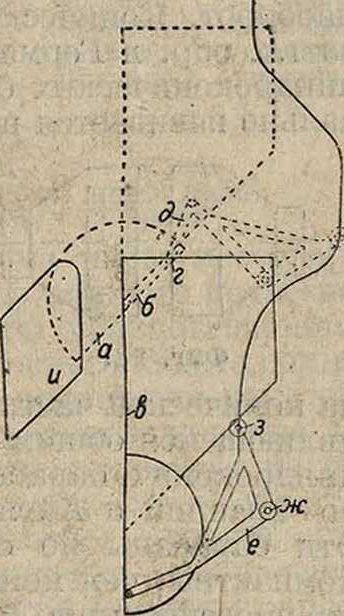
речное сечение кузова обычно квадратное, глубина же достигает троекратной ширины. В виду большой нагрузки скипов рельсы применяются наиболее тяжелых профилей и хорошо укрепляются. В вертикальных шахтах опрокидывание скипов происходит следующим образом. Скип а (фигура 18) движется по проводникам, обхватываемым лапами б; он может качаться в раме в вокруг оси з; у переднего конца скипа укреплен ролик д. При подходе к разгрузочной площадке этот ролик попадает на изогнутый путь е, в то время как рама в продолжает подниматься вверх, благодаря чему скип принимает наклонное положение и опоражнивается. Для того чтобы скип при обратном ходе не заклинился или не опустился вверх дном, к раме ниже скипа прикрепляют особый буфер или же устраивают дополнительную кривую направляющую, по которой, катится ролик д при излишнем подъеме скипа. На фигуре 19 изображен скип, разгружающийся через дно, после того как будет открыт заслон. Открывание заслона производится автоматически при посредстве изогнутых по особой форме железных направляющих и скользящему по ним ролику. Схема механизма, управляющего открытием"заслона, приведена на фигуре 20. Зас- « лон а петлями вращается на оси б, помещенной в пункте в скипа; в пункте г на заслоне укреплена тяга д, шарнирно связанная с жестким треугольником е, вращающимся вокруг оси ж, лежащей в подшипниках, неподвижно связанных с рамой скипа. В верхнем углу треугольника укреплен ведущий ролик з. При полном открывании за^
слона последний перекрывает неподвижный жолоб и, укрепленный на копре, чем предохраняется падение кусков ископаемого в шахту. Существует несколько других приспособлений для открытия заслона. В наклоняющихся скипах ось вращения корпуса скипа помещена в верхней части рамы. Наклонение его достигается с помощью ролика или специальными двигателями, действующими сжатым воздухом.
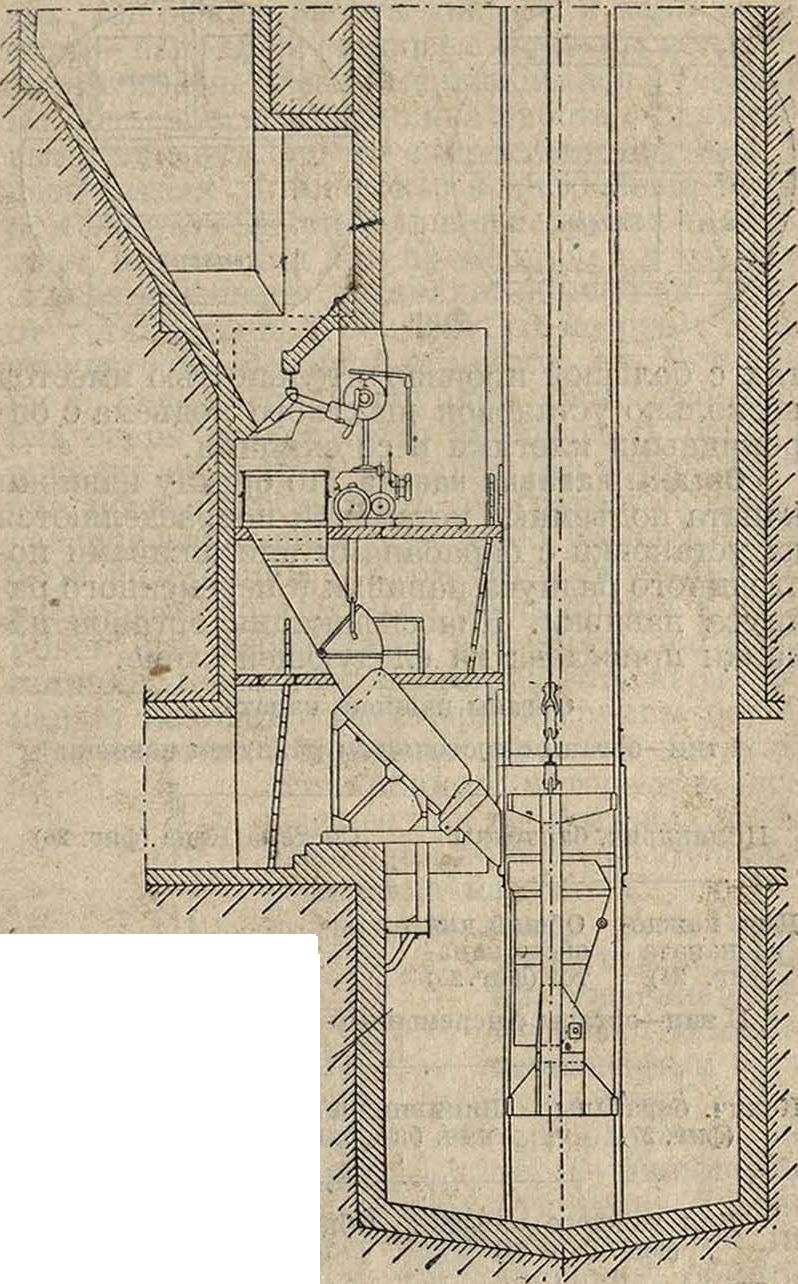
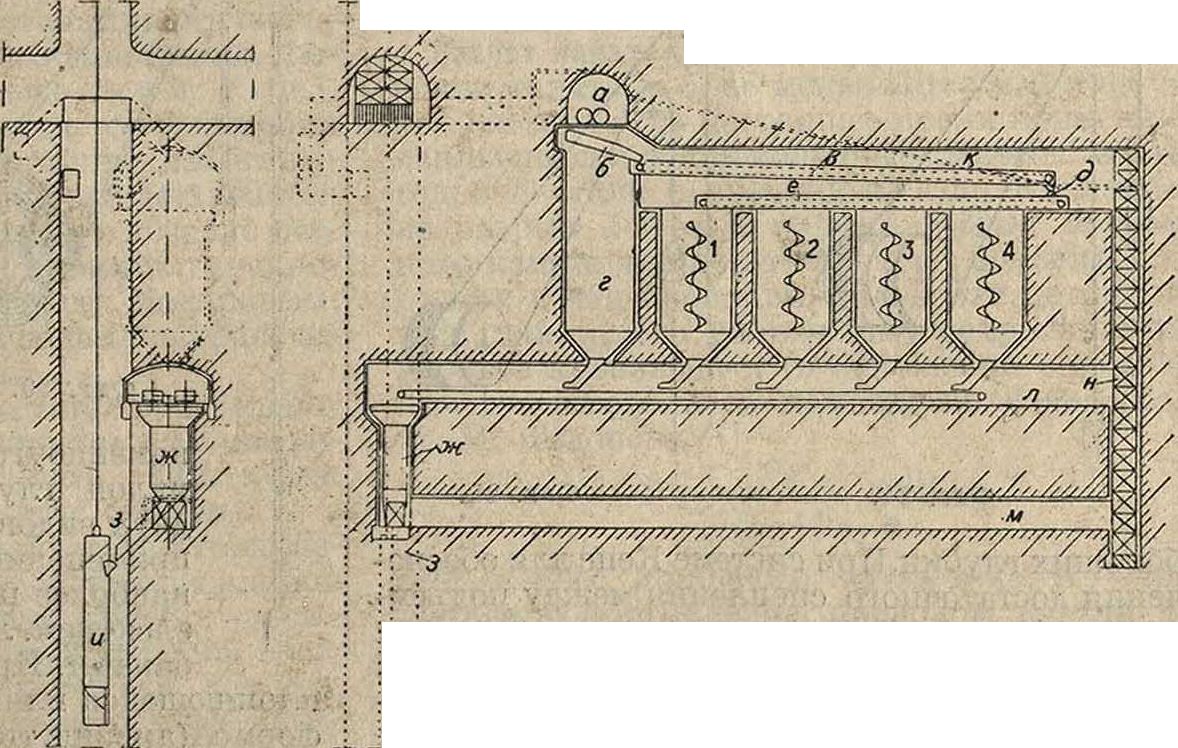
Нагрузка скипов может производиться не-, посредственно из доставленных от забоя вагончиков (в шахтах небольшой производительности) или. из бункеров емкостью для одного вагончика или с запасом на 1—П/г часа работы скипа. При разделении нагружаемого материала по. сортам нагрузка совершается из нескольких бункеров. На фигуре 21 изображена нагрузка скипа у рудничного двора шахты. На. фигура 22 изображено оригинальное устройство для наполнения скипов на одной немецкой угольной шахте. Вагончики с грузом подкатываются к двум опрокидывателям а, откуда уголь попадает на грохот б; отсеяный уголь идет на ленту в, а мелочь попадает в бункер г. Уголь с ленты поступает в дробилку д и на транспортную ленту е, распределяющую уголь по бункерам 1—ί. Под бункерами находятся две рядом расположенные ленты, подводящие уголь к дозатору ж, расположенному на платформе для взвешивания. По рештакам з.уголь по-· падает в скип и. Выработки к, л, м сообщаются между собой при помощи подъемника к. Каждый бункер содержит 250 тонн угля.
)
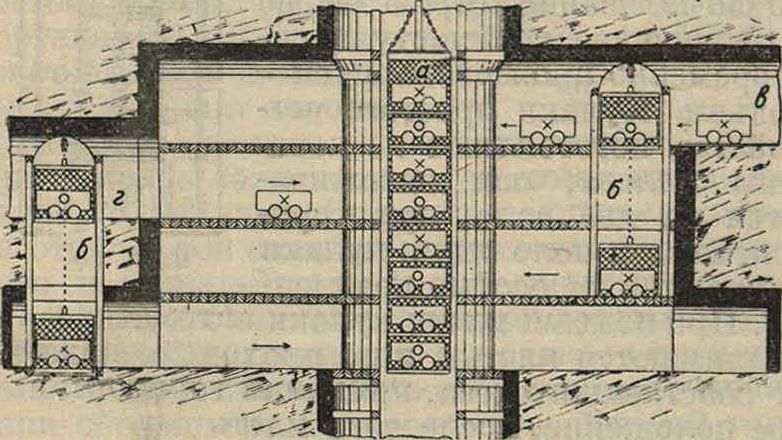
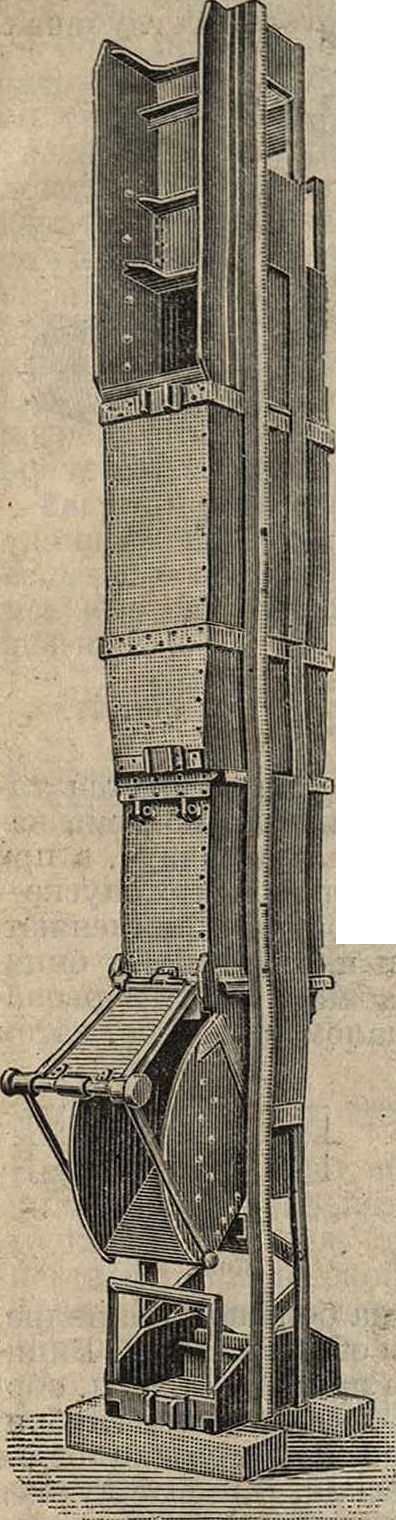
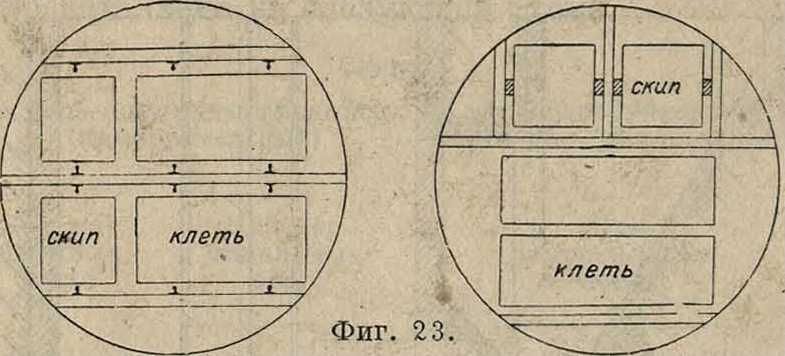
При сравнении опрокидывающихся скипов с разгружающимися через дно—первые имеют преимущества: 1) по простоте, жесткости и прочности конструкции, 2) по легкости и равномерности разгрузки, 3) по меньшему весу и стойкости (применение скипов с нижней разгрузкой особенно целесообразно при переоборудовании существующих шахт ‘с небольшим сечением и невысоким надшахтным зданием). Применение скипов исключает возможность подъема людей и материалов; в виду этого приходится иметь или отдельные шахты (неглубокие шахтыв США),или клеть-евой и скиповой подъемы располагают в той же шахте большого диаметра (фигура 23), или наконец скип и клеть подвешивают на одном канате;
Фигура 19.
Фигура 20.
При сравнёнии скипового подъема с клеть-евым первый имеет следующие преимущества:
1) большая производительность подъемной шахты, 2) совершенная механизация нагрузки и. выгрузки, 3) надежность действия, 4) меньшее сечение шахты при равных· других условиях, 5) более выгодное отношение полезного груза к суммарному, 6) меньшая мощность подъемной машины, 7) при той н«е производительности возможность подъема с меньшими Скоростями и ускорениями (меньший износ канатов, машин), 8) вследствие устройства бункеров большая независимость подъема от других горных работ, 9) спокойный ход скипов (увеличивается срок службы проводников, лап), 10) сравнительно равно мерное потребление энергии подъемом, 11) возможность применять при разработках вагонетки с большей емкостью (меньший вагонный парк, меньший износ их), 12) возможность точного взвешивания, 13) лучшая вентиляция
рудника (меньшая скорость движения скипов в шахте и небольшая площадь сечения, занимаемая скипами), 14) более низкая стоимость надшахтного здания (высокая баш-^ня с минимальной "площадью пола).
К недостаткам скипового подъема относятся 1) большие затраты по оборудованию рудничных дворов (бункера, приспособления для нагрузки), 2) необходимость оборудования отдельного подъема для спуска людей и ма-. териалов, 3) большее измельчение и пыле-
Фигура 22.
Фигура 21.
образование ископаемого, 4) трудность надзора за чистотой полезного ископаемого и Трудность разделения его по сортам и δ) большая глубина зумпфа шахты. Р. п. в обыкновенных клетях преимущественно распространен в СССР и Европе;
подъем в скипах, в клетях с наклоняющейся платформой и в опрокидывающихся клетях широко применяется в Америке; за последнее время подъем в скипах начинает распространяться все больше в Европе. В СССР на шах
тах с большой производительностью имеется несколько установок шахтного подъема с опрокидными клетями и со скипами.
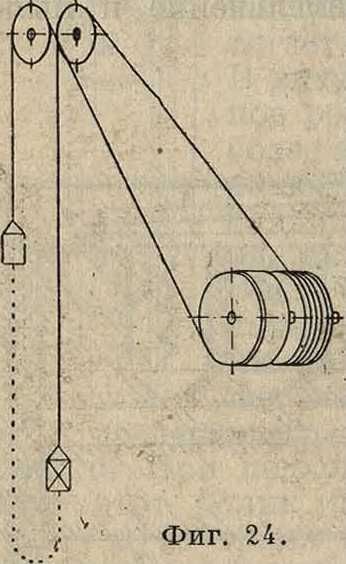
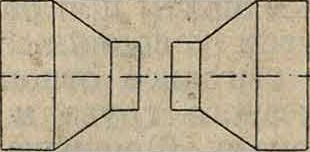
Органы навивки каната. По органу навивки каната подъемные установки подразделяются на установки с барабанами или шкивами постоянного радиуса навивки и переменного радиуса навивки. Классификация органов навивки приведена на следующей схеме.
Органы навпвкн каната I тип—органы с постоянным радиусом навивки
Цилиндрич. барабаны Система Кепе (фигура 26)
Для кашдо- Общий для го каната обоихкана-(фигура 24) тов(фигура25)
II тип—органы с переменным радиусом навивки
Конич. барабаны Бицилиндроко- Бобины (фигура 27) нич. барабаны (фигура 30)
_I_
Для каждого каната Общий для обоих ка-(фигура 28 и 31) патов (фигура 29)
Цилиндрич. барабаны благодаря простоте конструкции дешевы и имеют в СССР большое распространение. На новых шахтах Донец-· кого и др. бассейнов установлены б. ч. подъемные машины с такими барабанами без нижнего подвесного каната для глубин меньших 300 ж и с нижним подвесным канатом—для
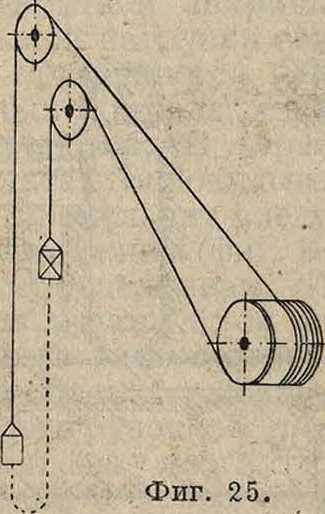
больших глубин. При системе Кепе для обеспечения достаточного сцепления между подъемным канатом и ободом шкива трения при всех положениях клетей необходим подклетьевой или хвостовой канат. Эта система аналогична передаче гибкой связью; направляющие шкивы и шкив трения расположены в одной вертикальной плоскости. Система Кепе применяется главным образом в Германии. В СССР имеется несколько установок системы
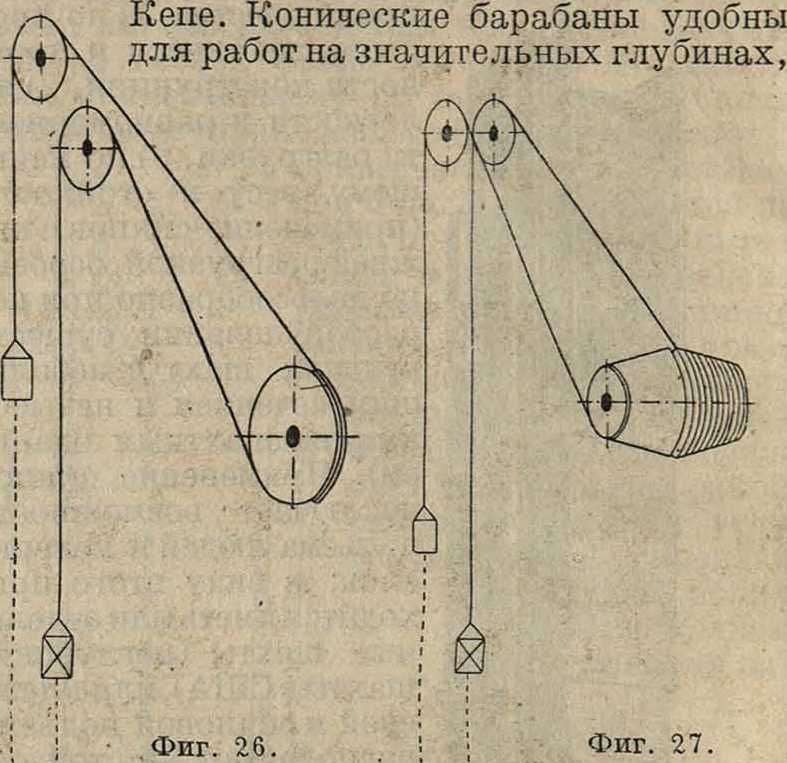
так как при этом подъеме не требуется тяжелый нижний канат. В начале подъема навивка производится на малый радиус, а при окончании подъема—набольшой; при спуске— наоборот. Конические барабаны применяются гл. обр. в Германии и Англии! На бицилиндроконических барабанах канат первоначально навивается на малом цилиндре, затем
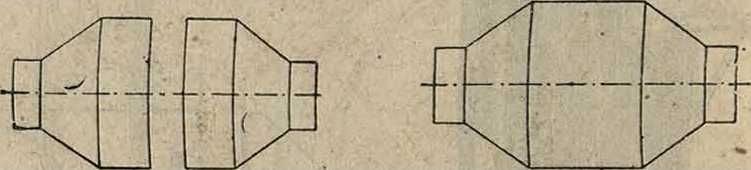
Фигура 28. Фигура 29.
на конической части и на большом цилиндре, являющемся общим для обоих канатов. Бици-линдроконич. барабаны применяются гл. обр. во Франции и Англии для больших глубин. Эти барабаны по своей конструкции более компактны, чем конические, и имеют лучшее уравновешивание. В Америке при малых глубинах для опрокидных клетей применяются эти барабаны с резким профилем и большим углом подъема ко-т нуса. В СССР имеется несколько установок с бицилиндроконич. барабанами. В Подмосковном
Фигура зо.
[2 Фигура 31.
каменноугольном бассейне для шахт малой глубины возможно развитие двух видов подъемных установок; при применении обыкновенных клетей д наиболее простыми и удобными будут jj электрич. лебедки с цилиндрич. барабанами. При применении клетей с наклоняющейся или переворачивающейся платформой (америк. типы) возможно и распространение америк. системы подъема с бицилиндроконич. барабанами резкого профиля, .соеди-
ненными зубчатой передачей с асинхронным мотором. Бобины служат для навивки плоско- го каната (аналогично с навивкой киноленты). Для плоских алойных канатов бобины очень удобны; при навивке плоских металлич. канатов благодаря неравномерной свивке иногда получаются перекосы каната, вызывающие увеличение напряжений в отдельных проволоках, что ведет к сокращению срока службы каната. Бобины нашли применение во Франции и Бельгии. Установки с бобинами для экс-плоатационных работ в настоящее время в СССР не проектируются, но зато находят применение при проходке глубоких шахт, так как с изменением высоты подъема легко можно регулировать длину каната и иметь одновременно хорошее уравновешивание.
Системы уравновешивания Р. п. Различают два вида систем уравновешивания: неуравновешенные системы и уравновешенные системы. Классификация их приведена на следующей схеме.
Системы уравновешивания подъема
______L_________
Неуравнове- Статически урав- Динамически шейная сис- ыовешенная сис- уравновешенная тема тема система
Полное Частичное Полное Частичное статич. статич. динамич. динамич. уравнове- уравнове- уравнове- уравновешивание шивание шивание шивание
Сист. Сист. акад. Федо- проф. Макарова 1 рова
Неуравновешенная система имеет место при цилиндрич. барабанах без нижнего подвесного каната. Полное, статич. уравновешивание· достигается подвеской низшего каната одинакового погонного веса с подъемным канатом. Частичное статическое уравновешивание достигается подвеской нижнего каната с погонным весом меньшим, чем у подъемного каната, или же применением установок с переменным радиусом навивки. Динамическое уравновешивание достигается подвеской нижнего каната с большим погонным весом, чем подъемный (т. н. система с тяжелым нижним канатом), или применением барабанов с переменным радиусом навивки с более резким профилем барабана. При системе динамического уравновешивания, предложенной акад. Федоровым (т. н. гармонический Р. и.), с полным уравновешиванием сил инерции применяется специально рассчитанный тяжелый нижний подвесной канат, чем достигается постоянство момента вращения в течение всего подъема. Сист. полного динамич. уравновешивания, предложенная проф. Макаровым, основана на применении специально рассчитанного профиля барабана.
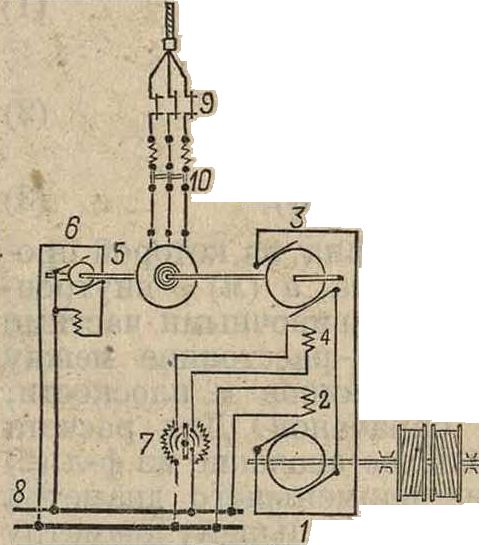
Приводы.Породу привода установки бывают с паровыми подъемными машинами и электрическими подъемными машинами, среди которых можно выделить три основные системы: а) с асинхронным подъемным двигателем трехфазного тока и зубчатой передачей (ординарной или двойной); б) с подъемным-двигателем постоянного тока и умформерной группой сист. Леонарда (с зубчатой передачей пли без нее, с непосредственным соединением вала барабана с валом тихоходного мотора); в) то же, но только добавляется маховик Ильгнера в умформерной группе и регулятор скольжения для асинхронного мотора в умформер-ной группе. Область применения трех перечисленных систем установки с асинхронным мотором применяется сравнительно Меньшей мощности и главным образом на тех установках, где режим работы двигателя мало меняется,·—например скиповые подъемы и клеть-евые подъемы с мало меняющимися функциями подъемов, где возможна работа с одинаковыми максимальными скоростями подъема. К недостаткам установок с асинхронным мотором следует отнести большие нагрузки наэлек-трич. подстанции при пуске машин в ход (пусковая мощность составляет обычно ок. 180% от установленной подъемного мотора); к достоинствам—меньшая стоимость их. Установки с умформерной группой сист. Леонарда благодаря возможности производить регулирование скорости Р. п. почти без потерь энергии позволяют выбрать диаграммы подъема, дающие небольшие перегрузки на электрической подстанции, и кроме того легко автоматизировать подъем. Для очень крупных установок, где необходимо выравнять нагрузку станции, применяется система Ильгнера-Лео-нарда: маховик умформерной группы накопляет энергию в моменты неполной нагрузки асинхронного мотора и возвращает ее при перегрузках.Схема установки по оистеме Леонарда приведена на фигуре 32, где 1— подъемный мотор постоянного тока с независимым возбуждеииемЗ; 3— пусковая динамо с независимым возбуждением 4; 5—, • умформерный мо-^ тор; 6—динамо-возбудитель; 7—реостат; 8—шины, питающие обмотки возбуждения 2 и4; ,9—разъединители; 10—автоматический максимальный выключатель; И—барабан подъемной машины.
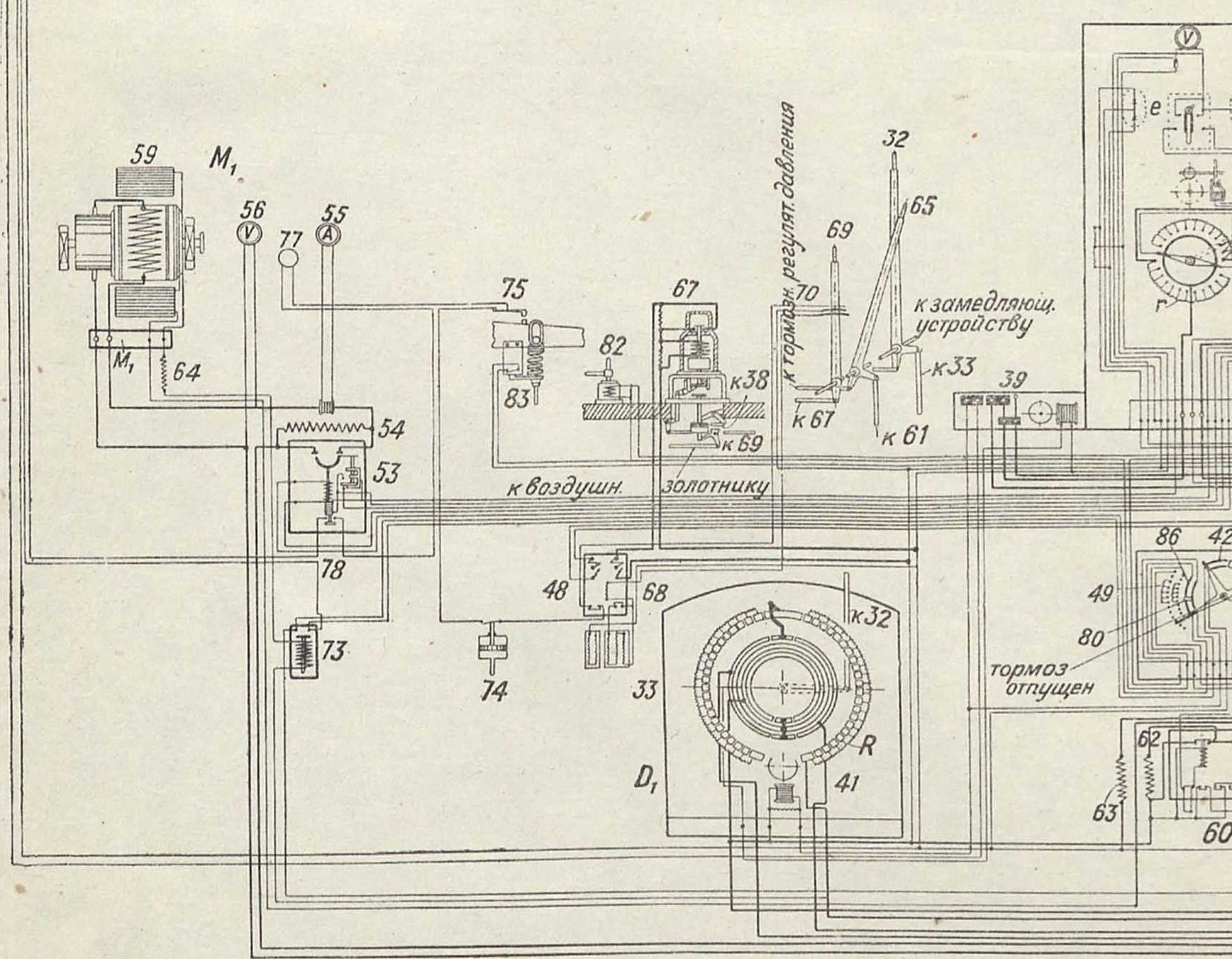
На фигуре 33 представлена выполненная фирмой AEG детальная схема коммутации двух одновременно работающих подъемных машин, электрифицированных по системе Ильгнёра-Леонарда с общим умформерным агрегатом.
Расчет наката. Средняя прочность всех проволок каната должен быть не менее ПОкз/жи2 и не более 180 килограмм/мм2. В настоящее время применяют исключительно проволочные канаты из тигельной стали с временным сопротивлением на разрыв 140—180 к г/мм2. Расчет подъемного каната для вертикального подъема благодаря почти пропорциональности погонного веса каната его разрывному сопротивлению удобнее производить (в отношении определения погонного веса каната) по формуле акад. Μ. М. Федорова:


V =
Q о к“
ν.βγ
-ЛЯ
о кг/м,
где Q0—вес концевого груза в килограммах, Kz—временное сопротивление проволок каната на разрыв в килограммах/м2, т—запас прочности каната, у—вес 1 ж3 металла каната в тез, β—коэфици-ент, учитывающий утяжеление каната благодаря наклонному положению проволок в канате после свивки и наличию сердечников.
При расчетах обыкновенно принимают Kz== (150-^-160) · 106 «з/ж2; т= 7 для исключительно грузовых подъемов; т= 8-4-9 для подъемов, которые обслуживают также спуск и подъем людей; γ=Ί 800 килограмм/м3 для тигельной стали; /5=1,154-1,35, А= где двкз/ж—погонный вес нижнего подвесного каната (А=1 для подъемов без нижнего каната или с нижним подвесным канатом одинакового погонного веса с подъемным, А > 1 для Р. п. с нижним подвесным канатом большего погонного веса, чем подъемный); Я0 в ж—вертикальная длина каната от оси направляющего шкива до нижней погрузочной площадки в шахте. По рассчитанному погонному весу делается выбор каната по каталогу и проверяется запас прочности выбранного каната. Предельные углы отклонения каната на направляющих шкивах и барабанах в плоскости струны каната от плоскостей, перпендикулярных к оси направляющего шкива или барабана, практикой установлены в 1°30. Наименьшая допустимая наклонная длина L (в ж) струны каната, соответствующая предельному углу отклонения каната в 1°30/, м. б. определена по следующим ф-лам:
Для установок с одним общим барабаном
ПИггге=19 В, (1)
для установок с#двумя барабанами
Lmin^19(2B+a-S) (2)
•или
Lmin=W (S-a), (3)
где В (ж)—ширина барабана, на которой производится навивка каната; а (ж) — внутреннее расстояние между навивочными частями двух барабанов; S (ж) — расстояние Между осями направляющих шкивов в плоскости, параллельной оси барабанов. Для расчета принимается наибольшее значение из ф-л (2) или (3). Отношение наименьшего диаметра барабана или шкива к наибольшему диаметру проволок, составляющих канат, должно быть не менее 1 2U0 при стали с сопротивлением на разрыв 120 «з/жж2; при более крепкой стали это отношение может быть уменьшено, но не ниже, чем до 1 000. Отношение, диаметра барабана и направляющих шкивов к диаметру каната должно быть не менее 80 в установках на поверхности.
Расчет подъемных установок с постоянным радиусом навивки производят, исходя из двух различных положений. 1) В основу расчета принимают определенный закон движения подъемного сосуда, то есть кинематику подъема, в связи с чем получается определенный закон изменения моментов вращения на валу барабана, а следовательно и мощности двигателя. 2) В основу расчета принимают определенный закон изменения момента вращения подъемной машины (чаще, всего постоянство момента вращения в течение всего периода подъема или части его), что приводит как следствие к определенному изменению скорости if ускорения подъема подъемных сосудов (например изменение скорости по закону кругового или гиперболич. синуса, изменение ускорения по закону кругового или гиперболич. косинуса). В качестве основного динамич. ур-ия подъемной машины с постоянным радиусом навивки независимо от способа расчета можно пользоваться ур-ием акад. Μ. М. Федорова для усилия (в килограммах) на окружности навивки:
F=AQ —Δ (Н — 2 х) -- Mj. кг,
где Q—полезный поднимаемый груз в из; к— грузовой коэф., учитывающий сопротивление движению до барабана (ft =1,1 4-1,25); 4== q — р в кз/ж—разность погонных весов нижнего подвесного и подъемного канатов; Н—полная высота Р. и. в ж; х—путь в ж, пройденный подъемным сосудом от начала Р. и.; Ж—масса всех движущихся частей подъемной установки, приведенная к окружности навивки каната на барабан в
)—линейное ускорение подъемного сосуда в ж/ск2·. Определение мощности подъемного мотора производится по ф-ле
N tr= k V
где Ω—максимальная угловая скорость барабана в течение подъема в скГ1 (скорость при нормальном числе оборотов двигателя); η— кпд зубчатой передачи, если таковая имеется; Mefr—эффективный момент вращения на валу барабана, к-рый м. б. определен по квадратичной ф-ле:
Meff =
£(М 2 О
кгм,
и (ίх + tз) -Ь t2 Н
где Σ (Ж2<) складывается из отдельных эле-1) При изменении Ж по прямой от ментов:
величины Ж2 до Ж2 в течение времени ίχ
Σ(Μ4) =
Mf+ м,м2 + м?
2) При значениях Ж! и Ж2, близких друг другу, можно принять
Σ(Μ4)=^Ι.ίι.
3) При М2=Мг
Σ(Μ4)=Μ{ t.
4) При Ж2=0
ЦМЧ)= М{^·
Здесь tt и ί3—продолжительность ускоренного и замедленного движений подъемного сосуда в ск.; ί2—продолжительность равномерного движения в ск.; Θ—продолжительность паузы в ск.; а—коэф., учитывающий ухудшение охлаждения мотора при неполном числе оборотов; β—то же при останове мотора. Коэф. а и β зависят от конструктивных особенностей подъемного мотора. Например фирма General Electric Со. дает следующие их значения: для моторов постоянного тока α=0,75, β=0,5; для асинхронных моторов трехфазного тока а=0,5, /3=0,25. Для определения мощности подъемного мотора при проектировании Шахстрой пользуется коэфициентами, предложенными акад. Μ. М. Федоровым: а=1 и β=χ!3· Подсчитанный и выбранный подъемный мотор необходимо проверить на перетрузку в начале нормального подъема и на перегрузку при маневрировании.
Лит.: Ф едор.ов М.М., Теория и расчет гармонпч. рудничного подъема, Екатеринослав, 1914; его же, Наивыгоднейший режим в некоторых типах рудничных подъемных установок, «Уголь и- Железо», Харьков, 1926, 11—12; Ш к л я р с к и и Ф. Н., Динамика рудничного подъема с постоянным радиусом навивки на основе трапедоидалъной диаграммы скорости, М. 1924; его же, Электрификация рудничного подъема, Л. 1932; Макаров В. С., Общая теория вертикальных шахтных подъемников с простыми клетями, «ГЖ», 1930, 8—9; Е л а н ч и к Г. М., Подъемные машины с бидилиндроконическ. барабанами, «Инженерный работ-
П 76 40 —
Фигура 33: 7—разъедипители; 2—общий для двух подъемов автом; тич. масляный трехиолюспый выключатель; L—шины, которые спабжак током два умформерных мотора 27; з—измерительный трансформато напряжения, служащий для включения вольтметра 4; 6—автомата1 масляный выключатель о максимальными электромагнитами в дву фазах каждой цепи, питающей соответственный умформерный мотор 2. О—сигпальные лампы у выключателя 3; 7—измерительный трансфо; матор тока, служащий для включения максимальных элсктромаглптс выключателя 5, амперметра ю, сериесных обмоток ваттметра 11 счетчика 72; 8—измерительный трансформатор напряжения, служащи для включения минимального электромагнита выключателя 5, волы метра 0, шуптовых обмоток ваттметра 77 и счетчика 72; 73—трансфо; матор, первичная обмотка которого включена в цепь, питающую умфо; мерный мотор 27, вторичная же питает статор сервомотора 19, обсл; живающего регулятор скольжения 78; и, υ, w—неподвижные электр: ды: ж, у, t—подвижные контрэлектроды, подвешенпые к одному кони рычага I, укреплеппого на валу сервомотора 79; к другому концу рь чага ( подвешен контргруз /; 10—ступенчатый выключатель, служ; щий для регулирования напряжения, подводимого к сервомотору 7: 17—выключатель длп замыкания накоротко обмоткп статора сервом, тора 79 (в положении, изображенном па схеме, ток пз трансформ; тора 73 пе идет в сервомотор); 29—выключатель, замыкающий нак: ротко цепь ротора умформерного мотора 27 с включающим и выклк чающим электромагнитами; 27—умформерный мотор; 22 (Бi—Е%)~ дипамо-возбудитсль; 23—контактный тахометр (на валу умформерног агрегата); 23—автоматич. шунтовой регулятор динамо-возбудителя 2; S—мотор, производящий включение в цепь возбуждения дипамо-возб; дителя и выключение из нее реостата q; 24—реле, приводящее в де: ствие мотор S; 26—амперметр и 27—вольтметр, оба для дипамо-возб; дителя 22; 28—роговые предохранители; 29—главный переключатся] оп состоит из двух частей; верхней В, служащей дли соответственное переключения пусковых динамо Лу—А2 и подъемных двигателе —М2, и нижней С, предназначенной для переключения динамо-во: будителен ΐ· —Е2 и соответственных частей коммутационного устро( ства аппаратов управления, шуптовых регуляторов и тому подобное. Часть В с< стоит из неподвижных (соединенных электрически соответственным пусковыми динамо и подъемными двигателями) проводящих поле (iVj—Nlt Р, TV, p2 В левой и ιΥ2—TV a, Pi, JVj, P2 в правой половит из монтированных па валу переключателя полуколец; α, β,γ, δ—обр; зующие; 32—рычаг управления, действующий при помощи тпг в аппарат управления; 33 (Dx—1)а)—аппарат управления, служащи для включения в цепь возбуждения пусковой динамо 34 (А,—Л2)
ник», Днепропетровск, 1926, 9, 10, 11 и 12; У м а н-с к и и В. Б., Выбор системы электрич. привода и дп-намич. режима для рудничных подъемных установок с постоянным радиусом навивки. «Уголь п Железо», Царьков, 1928, 34; е г о же, Выбор типа подъемной установки, там же, 1928, 39; Шмидт Ф., Основные положения подъемных машин, пер. с немецкого, Харьков, 1929; его же, Паровые подъемные машины, пер. с нем., Харьков, 1928; Филиппи В., Электрич. подъемные машины, пер. с нем. с дополнительной статьей инж. В. Б. Умаяского, Харьков, 1929; Герман А. П., Шахтный подъем, Л., 1932; Терпит о рев А., Рудничная доставка, 2 изд., М., 1929; Ф ер с тер Э., Электрич. подъемные машины, Харьков, 19 31; Broughton Η. Н., Electric Winders, L., 1927; tftudes techniques du groupement des honill6res victimes de Pin-v ision,t.2,Cables-Appareils d’enroulement, P., 1926; t.3, Machines d’extraction, P., 1926. И. Ильичев и И. Мушенко.