 > Техника, страница 80 > Синхронизация
> Техника, страница 80 > Синхронизация
Синхронизация
Синхронизация, с общей точки зрения приведение двух или нескольких периодически изменяющихся явлений к точному взаимному соответствию их периодов, в частности к соответствию, состоящему в совпадении по времени начала и конца последних. Периодич. явления, обладающие указанными свойствами, называются синхронными или синхронизированными. Так, если на какую-либо упругую систему, имеющую период собственных колебаний, равный Т, действует возмущающая сила, имеющая тот же период, причем начало действия этой силы совпадает с началом колебаний упругой системы, то колебания системы и возмущающая сила будут между собою синхронны. В этом случае возникает явление резонанса (смотрите Колебательные движения и Резонанс). Совокупность всех естественных и технич. условий, при которых данные периодич. явления становятся синхронными, называется синхронизмом. Если какие-либо из условий синхронизма для данного явления исчезают, то есть если синхронные явления перестают быть таковыми, то говорят, что они выпадают из синхрониз-м а. Несинхронные явления называются также асинхронными. Общее значение скорости синхронно перемещающихся объектов называется синхронной скоростью. Если какой-либо из этих объектов выпадает из синхронизма, то говорят, что он «скользит» по отношению к объектам, сохранившим синхронную скорость, другими словами, что он обладает некоторой относительной скоростью по отношению к последним. Отношение относительной скорости объекта, выпавшего из синхронизма, к синхронной скорости называется скольжением, которое конечно не следует смешивать со скольжением при перемещении одного тела по поверхности другого. С. с точки зрения кинематики механизмов есть приведение подобных или тождественных механизмов с одинаковыми кинематическими связями в такое движение, при к-ром отдельные пространственные расположения их в каждый момент времени тождественны. Простейшим случаем синхронного движения является движение двух шкивов с одинаковыми или разными диаметрами, насаженных неподвижно на вращающийся вал, или движение двух шкивов одинакового диаметра, приводимых в движение общей ременной передачей при отсутствии скольжения. Примером асинхронного движения может служить движение двух шкивов, хотя и равных диаметров, но при наличии скольжения ременной передачи по одному из них, или движение без скольжения ремня двух шкивов разных диаметров. Необходимым условием синхронизма движения частей одного и того же механизма или связанного комплекса механизмов служит наличие механич. или электрич. связей. В вышеприведенных примерах механич. связью служил вал и приводной ремень; в электрич. механизмах связью обычно является магнитное или электромагнитное поле, действующее на протекающие в поле электрич. токи. В зависимости от того, создает ли данная механич. или электрич. связь синхронные или асинхронные движения, и сама связь называется синхронной (синхронизирующей) или асинхронной.
В области электротехники синхронная электрич. связь применяется во многих случаях, когда треб егся различные части ме-
21
ханизмов или целых агрегатов привести в синхронное движение. Такая связь должна существовать иапр. при работе электродвигателей на общий приводной вал при необходимости устранения возможностей скольжения приводных ремней и установления равномерной нагрузки двигателей. Особенно важное значение имеет синхронная электрич. связь у разводных мостов, у которых каждая из половин приводится в движение собственным электродвигателем;
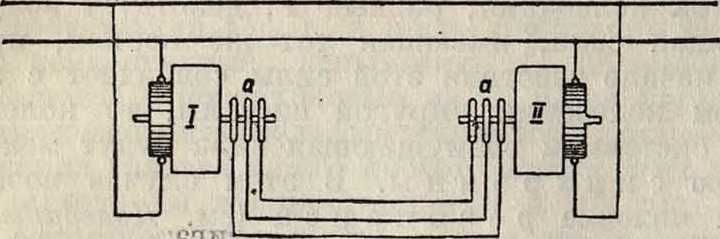
Фигура 1.
при несинхронном действии двигателей может произойти разновременная посадка частей моста. Синхронная электрическая связь необходима также и для портальных кранов с большими пролетами, у которых каждая опора перемещается при помощи собственного двигателя. Естественно, что при асинхронной электрической связи могли бы при этом получиться в механизме очень опасные для целости последнего перекосы. Точная С. движения двух электродвигателей достигается след, образом. Два электродвигателя I ц II постоянного тока. снабжаются каждый тремя контактными кольцами а (фигура 1), которые соединяются с тремя точками якорной обмотки, расположенными по периферии якоря на дуговом расстоянии друг от друга в 120°. Кольца одного из двигателей при помощи щеток соединены с соответствующими кольцами другого. Каждый из роторов м. б. при этом рассматриваем как якорь трехфазного генератора. При синхронном вращении якорей по проводам, соединяющим кольца а, никакой ток проходить не будет. Если же
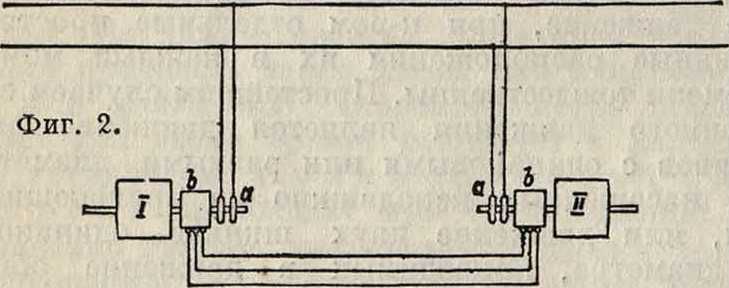
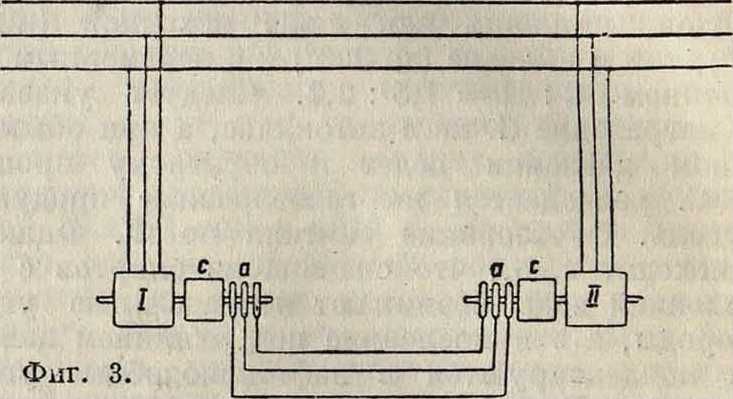
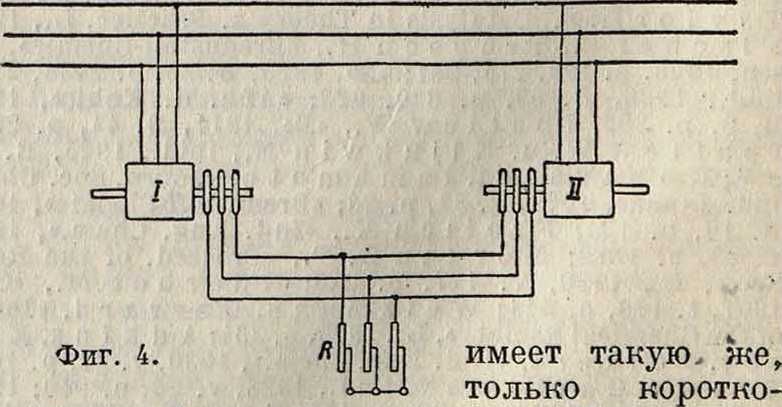
какой-либо из якорей начнет нарушать вследствие каких-либо причин синхронный характер движения, то по проводам потечет т. н. «выравнивающий ток», к-рый будет оказывать тормозящее действие на опережающий якорь и ускоряющее действие на отстающий якорь до полной их С. Указанная синхронная электрическая связь обладает однако нек-рыми недостатками, а именно: наличие контактных колец вызывает искажение магнитного поля, что в свою очередь вызывает искрение щеток; помимо того синхронный ход электродвигателей имеет место в рассматриваемом случае лишь при нормальном числе оборотов; при небольшом же числе оборотов синхронное движение отсутствует. Для устранения первого недостатка двигатели I ж II снабжаются еще вспомогательными синхронными двигателями b, причем схема фигура 1 изменяется так, как указано на фигуре 2, однако при этом второй из указанных недостатков не устраняется. Вследствие этого, а также вследствие некоторой своей сложности указанный способ С. широкого распространения не получил. Для устранения обоих недостатков моторы I ж II снабжаются вспомогательными асинхронными двигателями с у которых статоры и роторы соединены параллельно. Соответствующая схема представлена на фигуре 3. Так как в этом случае вращающееся магнитное поле образуется и при неподвижных роторах, то синхронное движение двигателей обеспечено с самого же начала движения их. Если синхронная электрическая связь должен быть осуществлена для индукционных трехфазных двигателей, то применяется схема, представленная на фигуре 4, где R представляет один общий пусковой и регулирующий реостат. Однако для большей полноты С. и в этих случаях применяют синхронизирующие вспомогательные индукционные моторы. В некоторых случаях требуется, наоборот, достичь определенным образом отрегулированное асинхронное движение с определенным «скольжением». Такой случай представляется
например в бумажном производстве. На бумагоделательных машинах (смотрите) бумажная пленка движется сначала вместе с сушильным сукном по поверхности ряда барабанов, а затем, по достижении определенной степени сухости, покидает сукно и перемещается по дальнейшему ряду барабанов! Т. к. при высыхании бумажная пленка укорачивается, то при одной и той же линейной скорости точек поверхностей барабанов бумага либо рвалась бы либо давала бы складки. Отсюда является необходимость определенного отрегулированного асинхронного движения валов машины, то есть определенного «скольжения» движения (в вышеуказанном смысле) валов друг относительно друга. Часто могут иметь место не только синхронные движения (в частности вращения) физич. тел, но и синхронные некорпускулярные движения, наир, вращения магнитного поля. В качестве примера рассмотрим следующий случай. Допустим, что к статору асинхронного двигателя подводится трехфазный ток, создающий вращающееся магнитное поле, и что ротор двигателя
замкнутую обмотку, как и статор. Пусть число пар полюсов ротора равно р, частота тока, то есть число полных периодов тока в ск. (чиело «герц»),—
/, полюсное деление, то есть дуговое расстояние между нейтральными линиями двух смежных. полюсов,—т, полный период тока Т=-у. Магнитное поле, создаваемое статором, будет совершать при этом -L об/ск., или 60 —“ об/м.,
а т. к. каждый оборот равняется по длине 2 τρ, то следовательно в течение минуты магнитное поле переместится на величину
^L. 2τρ=60 2т.
Т. о. магнитное поле будет пересекать провода ротора с линейной скоростью, равной 2т//ск. В обмотках ротора будут индуцироваться переменные электродвижущие силы с частотой, также равной /. Возникающие вследствие этого в короткозамкнутых проводах ротора токи, вступая во взаимодействие с магнитным полем, заставляют ротор вращаться. Если бы на ротор не действовали никакие внешние силы, то скорость вращения его увеличивалась бы до тех пор, пока она не стала бы равной скорости вращения магнитного поля, после чего ротор продолжал бы вращаться с достигнутой им скоростью, то есть с этого момента ротор и магнитное поле вращались бы синхронно. В этом случае магнитные линии очевидно совсем не пересекали бы проводов ротора, т. ч. ток в последних был бы равен нулю. В реальных условиях, то есть при наличии внешних сил, приложенных к ротору, последний, начав свое вращательное движение, достигает при установившемся режиме некоторой стабильной скорости, которая однако ниже скорости вращающегося магнитного поля. Т. о. вращения магнитного поля и ротора будут асинхронны при наличии нек-рого «скольжения» последнего. Так как вращающий момент, приложенный к ротору, пропорционален наводимой в роторе эдс, а последняя пропорциональна относительному перемещению проводников ротора в электромагнитном поле, то вращающий момент пропорционален «скольжению». Обозначая синхронную линейную скорость через V, а отстающую относительную скорость через ν, «скольжение» через s, имеем:
Если /—частота вращения ротора, то υ=2 т/;
точно так же
V=2 т/,
откуда
V
V

= s и=fs,
то есть частота вращения отстающего ротора при асинхронном установившемся вращении равна частоте наводящего тока, умноженной на скольжение.
См. также Генератор переменного тока, Синхронный двигатель, Телевидение.
Лит.: Л ю с т Г., Синхронные машины, Л., 1932; Т о л в и н с к и и В., Электрич. машины, П., 1923; Я н Г., Испытания электрич. машин, пер. с нем., 2 изд., М.—Л., 1931; Круг К., Основы электротехники, т. 2, М.—Л., 1932; Поярков М., Центральные электрич. станции, 2 изд., М.—Л., 1927; Ч е ч е т Ю., Генераторы и моторы перемен, тока, 2 изд., М.—Л., 1931. М. Серебренников.