 > Техника, страница 80 > Синхронный двигатель
> Техника, страница 80 > Синхронный двигатель
Синхронный двигатель
Синхронный двигатель, электрич. машина переменного тока, вращающаяся с постоянной угловой скоростью. Скорость вращения С. д. обусловливается частотой тока, которым питается двигатель, а также числом пар полюсов последнего. С. д. применяются а) для привода машин — орудий, станков—в тех случаях, когда не требуется изменения скорости при нормальной работе, а во время пуска — боль
ших моментов вращения, б) как вращающиеся компенсаторы, предназначенные для регулирования сдвига фаз в электрич. установках "и поддержания устойчивости параллельно работающих синхронных систем при передаче энергии. Выбор С. д. для силовых установок требует предварительного внимательного рассмотрения всех условий и детальной оценки всех положительных и отрицательных сторон самого С. д. Преимущество С. д. перед другими двигателями переменного тока, в частности перед асинхронными, заключается в том, что 1) нормальные С. д. не берут из сети тока возбуждения, поэтому коэф. мощности м. б. высоким; 2) они м. б. рассчитаны с междужелезным пространством, большим, чем у индукционных двигателей; 3) опрокидывающий момент у этих двигателей значительно больше, вследствие чего они могут выдерживать большие перегрузки. Свойство С. д. вращаться с неизменной скоростью при постоянной частоте тока является достоинством лишь в нек-рых случаях. Необходимость иметь источник постоянного тока для возбуждения и различного рода пусковые приспособления несколько усложняет установку С. д. В силу этих соображений С. д. применяются там, где они могут дать вполне определенные преимущества. За последние годы благодаря большим конструктивным усовершенствованиям, а также улучшению способов пуска в ход, С. д. находят все большее и большее распространение. Они могут с успехом применяться для насосных и компрессорных установок, для привода турбовоздуходувок, прокатных станов, штамповальных станков, дробилок, а также в установках для преобразования одного вида электрич. энергии в другой, гл. обр. переменного тока в постоянный или переменного тока одной частоты в переменный ток другой частоты. С. д. как компенсатор делается теперь неотъемлемой частью устройств производства, передачи и распределения электрич. энергии. Мощность синхронных компенсаторов в одной единице все возрастает и за последние годы она достигла 80 000 kVA.
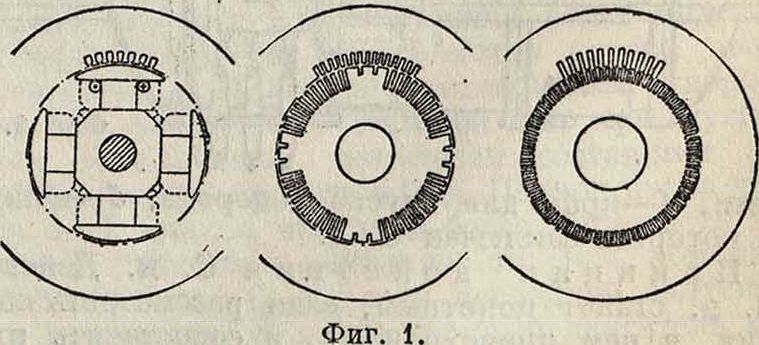
Устройство С. д. В конструктивном отношении С. д. весьма сходны с устройством синхронных генераторов переменного тока (смотрите). С. д. выполняются а) с явно выраженными полюсами, б) с неявно выраженными полюсами, с распределенной обмоткой возбуждения, в) по типу асинхронных двигателей. Двигатели небольшой мощности делаются с неподвижной внешней магнитной системой и внутренним вращающимся якорем. Нормальное же устройство С. д.—вращающаяся внутренняя магнитная система (ротор) и внешний неподвижный якорь (статор). Типичные формы устройства якорной и магнитной систем С. д. изображены на фигуре 1.
Для повышения устойчивости работы, а также для улучшения пусковых свойств С. д. снабжаются демпферными обмотками. Если С. д. применяются в качестве компенсаторов, то ме-
ханич. часть этих машин м. б. несколько облегченной. Возбуждение С. д. осуществляется от собственного возбуждения — генератора постоянного тока, сидящего на одном валу с С. д., или же от постороннего источника тока (сети, специального агрегата и тому подобное.). Защита, вентиляция С. д., устраивается аналогично тому, как это имеет место в синхронных генераторах и асинхронных двигателях (смотрите Индукционные машины). В мощных синхронных компенсаторах за послед-J,
п
(1)
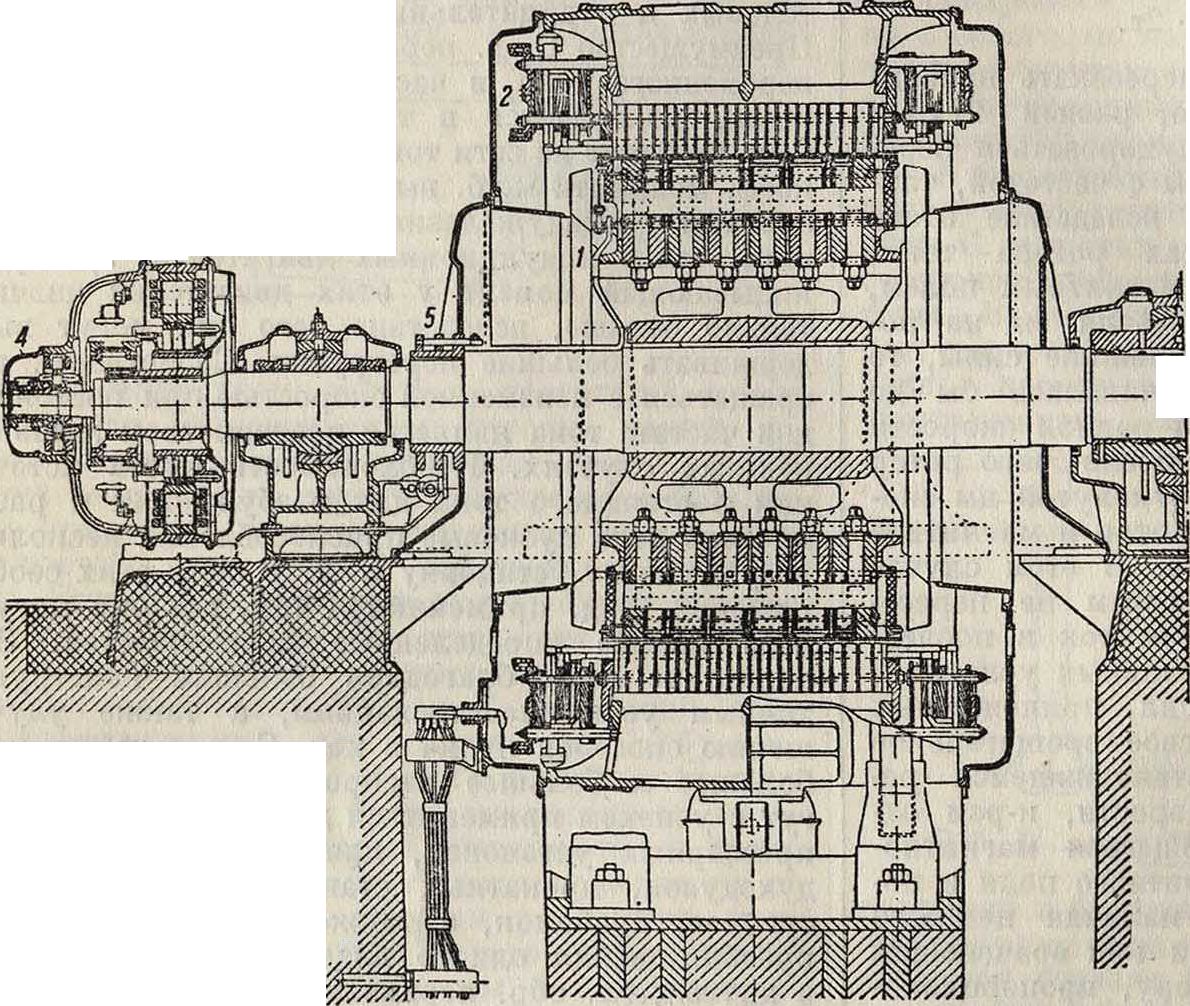
Фигура 2.
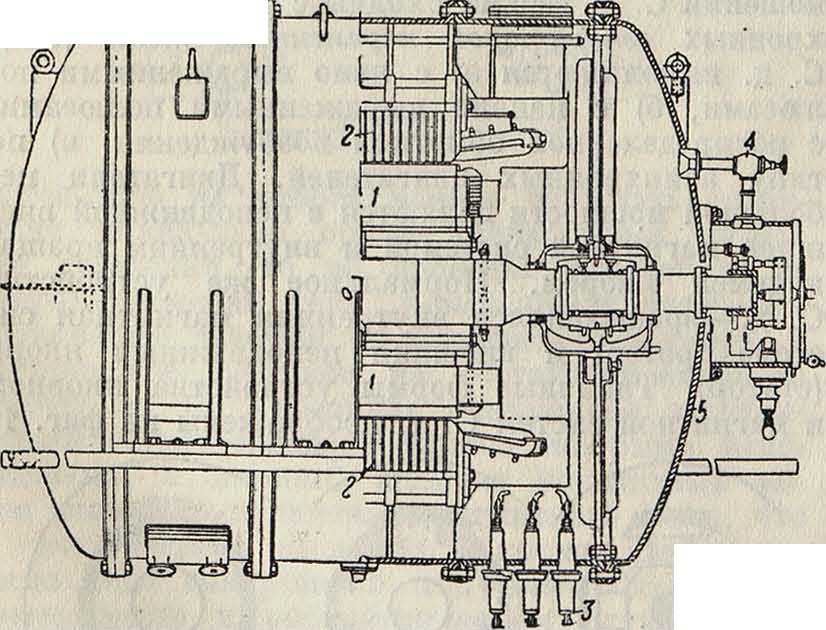
ние годы применяется водородное охлаждение с замкнутой циркуляцией, при этом С. д. часто устанавливают на открытом пространстве. На фигуре 2 приведен чертеж синхронного двигателя, а на фигуре 3 изображен разрез наружной установки С. д. с водородным охлаждением. На фигуре 2: 1—ротор, 2—статор, 3—возбудитель, 4—подвозбудитель, 5—собирательные кольца для ввода тока возбуждения; на фигуре 3: 1—ротор, 2—статор, 3—проходные изоляторы для ввода тока от
[?-f
Фигура 3.
сети, 4—кран для впуска водорода, 5—кожух, в который заключен С. д.
Принцип действия С. д. Действие С. д. станет понятным, если рассмотреть явления, в нем происходящие, и сопоставить их с работой следующей простой модели. Пусть статор (якорь) многофазной синхронной машины приключен к соответственной многофазной сети (с частотой /); возникающие в отдельных фазовых обмотках токи дают в совокупности магнитное поле, вращающееся относительно статора с числом оборотов п:
60 · f
V
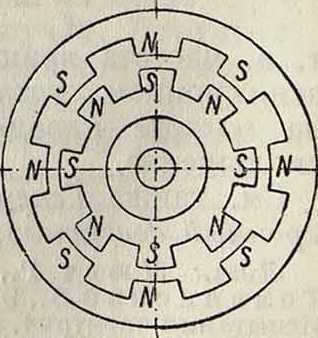
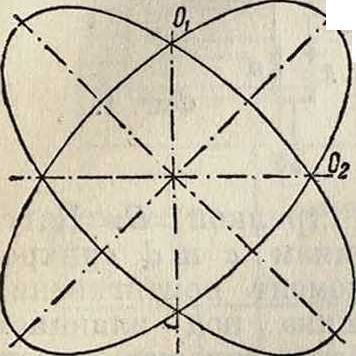
где р—число пар полюсов. Возбудив соответственно машину и приведя ротор ее во вращение с той же скоростью л и в ту же сторону, в какую вращается магнитное поле статора, можно увидеть, что при нек-рых условиях, ротор оказывается способным продолжать вращаться без помощи извне вследствие того, что вращающееся поле статора увлекает за собой ротор. Уяснить себе такое явление легко на следующей модели: если расположить _[ концентрически две вращающиеся около одной оси магнитные системы с явно выраженными полюсами чередующейся полярности, то эти системы примут такое относительное положение, как представлено на фигуре 4; полюсы располагаются друг против друга разноименными полярностями. Приводя в медленное вращение внешнюю систему, можно легко сообразить, что вследствие взаимного притяжения разноименных полюсов начинает вращаться и внутренняя система, и притом с той же скоростью. При постепенном увеличении скорости вращения одной системы происходит такое же увеличение скорости вращения и другой системы. Внешняя система создает во внутреннем пространстве между полюсами вращающееся магнитное поле аналогично тому, как статор многофазной машины создает вращающееся магнитное поле. Оси полюсов в рассматриваемой модели будут совпадать и при вращении, если не имеется сопротивления этому вращению. Если же к валу ротора (внутренней системе) приложить какое-либо сопротивление, то ротор моментально отстанет несколько от ведущего его поля, т. ч. между осями полюсов внутренней и внешней систем образуется некоторый угол, который на фигуре 5, изображающей модель в развернутом виде, обозначен через Θ.
Ротор, отстав на /_б, будет снова вращаться синхронно с полем внешней системы. При смене полюсов (на L-θ) от силы магнитного притяжения разноименных полюсов появится касательная составляющая, которая, создавая вращающий момент, уравновешивает сопротивление на валу ротора. Чем больше момент сопротивлений, приложенный к ротору, тем на бблыний угол в ротор отстает от ведущей системы (внешней системы). Активный вращающий момент от притяжения разноименных полюсов внешнего и внутреннего колес возрастает с увеличением б, и максимум вращающего момента получается при б 3έ 90°; с дальнейшим увеличением в вращающий мо-
Фигура 4.
мент убывает и становится равным нулю при О 180°. Еще большее увеличение Θ вызывает изменение направления вращающего момента. Отсюда получается, что ротор может вращаться синхронно с ведущей системой лишь при нагрузке, вызывающей отставание ротора на 0 < 180°,
о
| j | 1 | 1 | |||||
| 1 | У | J L | is | J и | N | J ,L | sl| Г |
| IT | || 1 | iPi г | "1 | li |
| I | 1 I : |
—θ f—
Фигура 5.
— в J—
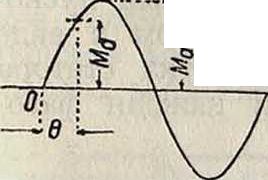
и при этом работа такого механизма получается устойчивой лишь при углах 0, заключающихся в пределах 0—90°. Изменение вращающего момента, развиваемого С. д., происходит приблизительно по кривой, представленной на фигуре 6.
Совершенно такое же действие производит вращающееся магнитное поле статора нормальной многофазной синхронной машины на ротор, то есть вращающееся поле статора увлекает за собой ротор, если ротор каким-либо способом уже доведен до вращения, со скоростью, синхронной с вращением поля статора, и если он расположен относительно поля статора так, что между его полем и вращающимся полем статора имеется притяжение; при этом поле ротора, как увлекаемое полем статора, вращается в синхронном двигателе при всех режимах его работы сзади поля статора, и притом угол отставания его возрастает с увеличением нагрузки двигателя. Приведение синхронной машины в такое состояние возможно с помощью вспомогательного двигателя или каким-либо искусст-·(„ венным способом. Развертыва-в ние синхронной машины в качестве двигателя нор-® мально невозможно, так как инерция масс ротора велика. Для того .чтобы ротор мог втянуться вращающимся полем статора в обращение с нормальной скоростью, необходимо было бы, чтобы скорость эта достигалась в течение промежутка времени не более 1/1 периода тока, то есть ускорение, сообщаемое ротору при трогании с места, должно было бы быть чрезмерно велико (при /=50 пер/ск.).
Пуск в х о д С. д. Активная работа С. д. начинается с момента параллельного приключения его к сети переменного тона. При обычном синхронизировании двигателей по фазоиндикаторным лампам или вольтметрам присоединение машины параллельно к сети является одной из наиболее сложных и ответственных операций, которая доверяется лишь опытному обслуживающему персоналу. Для возможности параллельного присоединения С. д. к сети переменного тока необходимо: 1) довести С. д. до т. н. с и н х р о н н о и с к о р о с т и, 2) возбудить С. д. так, чтобы напряжение на зажимах машины было равно напряжению сети, и 3) иметь полное совпадение всех фаз напряжения. Если эти условия не соблюдаются, параллельное включение может не удаться и повести к крупным авариям. Для облегчения пуска в ход С. д. в настоящее время применяют приспособления, при которых С. д. может входить автоматически не только в синхронизм, но и в фазу, и весь про
Фигура 6.
цесс присоединения двигателя к сети сводится лишь к замыканию рубильника или масляного выключателя.
Обычные способы пуска в ход. К этим способам принадлежат следующие виды пуска в ход С. д.: 1) при помощи машины, сцепленной с С. д., 2) посредством постороннего двигателя. 1) Если С. д. связан например с машиной постоянного тока, то агрегат м. б. пущен со стороны постоянного тока от аккумуляторной батареи или какого-либо другого источника энергии. В этом случае машина постоянного тока приводится во вращение, как двигатель, и, когда скорость вращения достигает синхронной, возбуждают синхронный двигатель; присоединение С. д. параллельно к сети переменного тока производится обычным путем, после того как достигнуты синхронизм и полное совпадение фаз напряжения. После присоединения С. д. к сети машина постоянного тока из двигателя переводится в генератор посредством соответствующей регулировки возбуждения. В некоторых случаях в качестве пускового двигателя м. б. использован возбудитель С. д., если мощность этого возбудителя достаточна для этих целей. 2) Часто случается, что С. д. приходится одному работать на привод и не всегда налицо источник постоянного тока, при помощи к-рогс можно запустить в качестве двигателя машину постоянного тока, связанную с С. д.; тогда для пуска в ход С. д. применяют асинхронный двигатель, причем ротор пускового асинхронного двигателя снабжается короткозамкнутой обмоткой или обмоткой в виде беличьего колеса. Сущность способа пуска в ход при помощи асинхронного двигателя заключается в следующем: пусковой асинхронный двигатель, имеющий обычно на два, а иногда на четыре полюса меньше, механически связывается с С. д. Вследствие меньшего числа полюсов асинхронный двигатель может привести во вращение синхронную невозбужденную машину со скоростью выше номинальной. При возбуждении С. д. асинхронный двигатель нагружается, скорость вращения ротора начинает "падать, пока скорость вращения С. д. не станет равной синхронной скорости, и при наступлении этого улавливается наиболее благоприятный момент для параллельного включения двигателя к сети. Пусковые двигатели с беличьим колесом не всегда удобны по той причине, что если момент синхронизма пропущен, то прежде всего нужно охладить беличье колесо и лишь затем приступить к вторичному пуску. Затем не всегда возможно хорошо рассчитать беличье колесо на том основании, что потери холостого хода С. д. со временем меняются. Поэтому иногда приходится исправлять беличье колесо, удаляя несколько стержней или подпиливая соединительное кольцо. Если ротор пускового двигателя снабжен обмоткой, то в некоторых случаях для получения более надежной синхронизации в цепь обмотки ротора вводят реостат, к-рый конечно усложняет и удорожает всю установку. Пусковой ток при пуске в ход асинхронным двигателем составляет 30— 40% номинального тока С. д. Период пуска длится 5—7 мин., а иногда и более. Мощность пускового двигателя составляет ок. 10% номинальной мощности С. д., если последний запускается вхолостую. Если синхронный двигатель приводит в действие насос или компрессор, то пусковой вращающий момент должен быть значителен, что ведет к увеличению пускового двигателя и затруднению самого пуска в ход.
t
Пуск в ход С. д. можно значительно ускорить; для этого С. д. сцепляют с асинхронным двигателем, имеющим одинаковое число полюсов с первым, и между зажимами С. д. и зажимами сети вводят сопротивления или реактивные катушки. Когда С. д. доведен приблизительно до номинальной скорости, его подключают к сети, не заботясь о синхронизации, т. к. под действием проходящих токов он сам входит в .синхронизм. После того как С. д. вошел в синхронизм, ему дают такое возбуждение, при котором ток, идущий в него, доводится до минимума и напряжение на концах сопротивлений значительно падает, а затем эти сопротивления замыкаются накоротко. Добавочные сопротивления или реактивные катушки должен быть соответственным образом рассчитаны, причем следует предвидеть наиболее неблагоприятное сочетание векторов напряжения, то есть совпадение обоих векторов по направлению. Обычно эти сопротивления выбирают такими, чтобы при включении через них невозбужденного двигателя на полное напряжение значение силы тока составляло г/3 от номинального. Омические сопротивления употребляют для двигателя до 10Q kVA, свыше этой мощности между
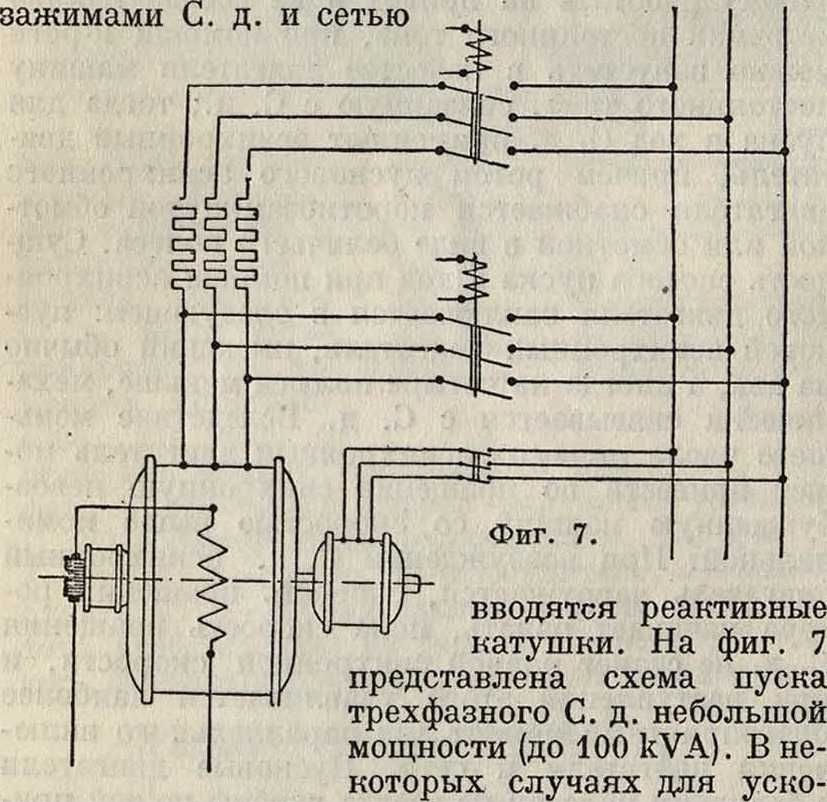
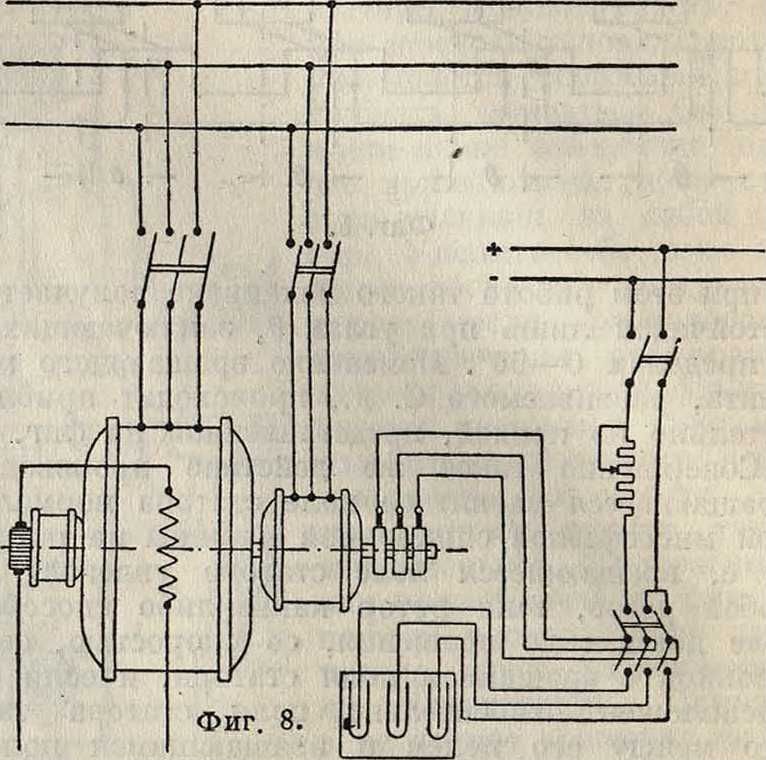
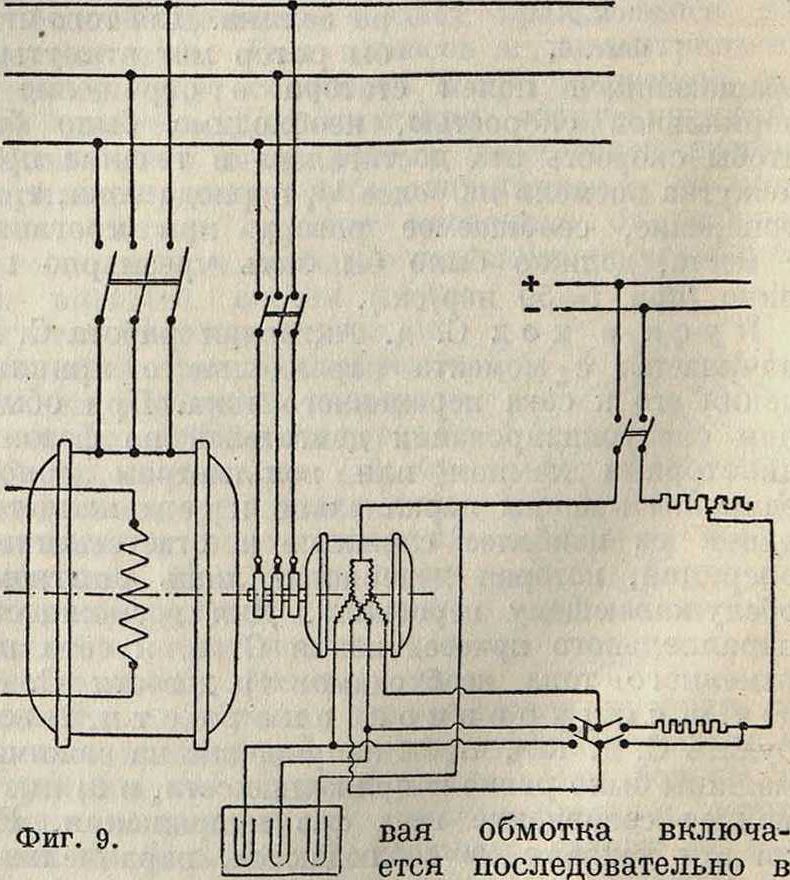
рения введения в синхронизацию пусковой двигатель С. д. снабжают одинаковым числом полюсов, причем обмотка ротора пускового двигателя выполняется разомкнутой; как только С. д. достигнет максимальной скорости, обмотка ротора размыкается и быстро приключается к сети постоянного тока (фигура 8), и тогда весь агрегат быстро входит в синхронизм. Для того чтобы фазы напряжения С. д. и сети при наступлении синхронизма совпадали, необходимо пусковой двигатель заклинить с С. д. определенным образом. Во избежание разрыва тока во вторичной цепи пускового двигателя при переключении ее на сеть постоянного тока питание переменным током производят со стороны ротора пускового двигателя, а статорную обмотку последнего разбивают на две части, из которых одна при достижении скорости, близкой к синхронной, начинает питаться постоянным током (фигура 9). При таком способе пуска в ход пусковой ток составляет 10—20% от номинального тока С. д. Продолжительность пуска в ход составляет ок. 1 мин. Приключение к сети производится путем простого включения рубильника, после того как установлено соответствующее возбуждение машины. Мощность асинхронного пускового двигателя для приведения во вращение С. д. вхолостую может быть определена по следующей формуле:
?‘=2’,4Т’®Я+Р <2>
CL
GD2 — маховой момент вращающихся частей в килограммахм2, ta — время пуска в ход в ск., п1 — синхрон
ное число оборотов С. д., п, — синхронное число оборотов асинхронного пускового двигателя, Р0 — потери холостого хода в kW.
Специальные способы пуска в х о д. К этим способам принадлежат следующие: 1) пуск в ход по системе Розенберга; 2) асинхронный пуск; 3) пуск в ход от синхронного генератора. Способ Розенберга состоит в следующем: на. валу С. д. насаживают обыкновенный пусковой асинхронный двигатель с ротором в виде беличьего колеса; трехфазная обмотка статора пускового двигателя открыта и каждая фазо-
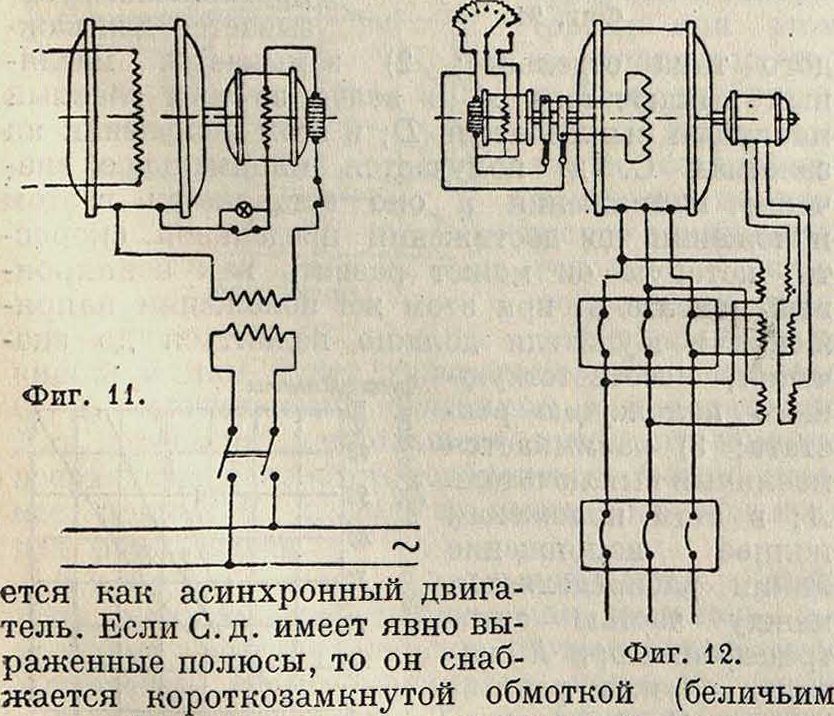
цепь С. д.; т. о. обмотка С. д. образует как бы нулевую точку для обмотки статора пускового двигателя (фигура 10). На фигуре 11 представлена схема соединения для случая, когда пусковой двигатель в цепь якоря С. д. включается чере?
трансформатор. Если С. д. однофазный, то на вал его насаживают коллекторный однофазный двигатель, обмотку статора которого соединяют последовательно со статорной обмоткой С. д. (фигура 12). Во время пуска в ход, когда скорость вращения агрегата достигает максимума,
С. д. возбуждается, когда он начинает входить в синхронизм, причем вначале это вхождение в синхронизм сопровождается сильными колебаниями скорости вращения и силы тока. После вхождения в синхронизм возбуждение С. д. устанавливается такое, при к-ром напряжение на концах статорной обмотки пускового двигателя достигает минимума, и тогда производятся короткое замыкание статорной обмотки, а затем и отсоединение ее от се-фш. ти. С пусковым дви гателем, допускающим ок. 30% номинального тока синхронного мотора, полный пуск в ход продолжается ок. 1 мин. При большем значении пускового тока (50—60% от номинального тока) продолжительность времени пуска в ход уменьшается до 15—20 секунд.
Асинхронный пуск в ход является в настоящее время весьма распространенным видом пуска в ход трехфазных С. д. Сущность этого способа заключается в том, что С. д. запуска-
колесом), которая располагается у полюсных башмаков. Если полюсные башмаки сделаны из листового железа, то они снабжаются осевыми пазами, в которые прокладываются медные или бронзовые стержни. Последние соединяются кольцами, идущими вокруг полюса, или кольцами, соединяющими стержни всех полюсов. Если полюсные башмаки массивны, то они сами по себе играют роль стержней и колец (пусковой обмотки). Можно увеличить начальный вращающий момент, увеличивая сопротивление
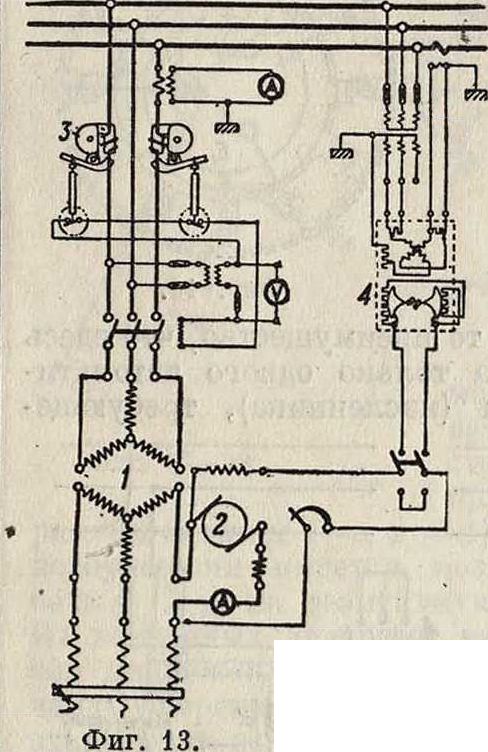
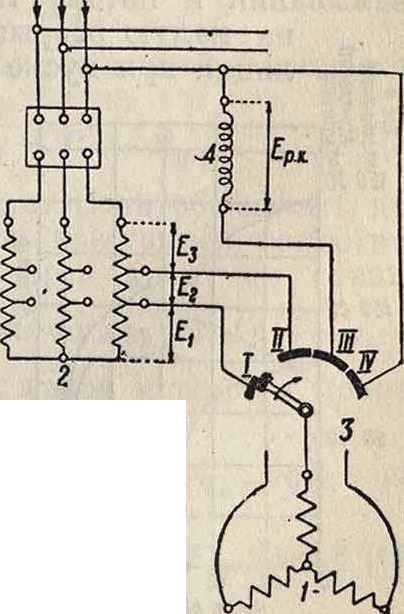
беличьего колеса; для данного напряжения момент в нек-рых пределах пропорционален сопротивлению ротора. Короткозамкнутая обмотка индукторов является как бы второй беличьей клеткой, но не полной, т. к. это однофазная обмотка и ее пересекает только часть потока. Эта обмотка уменьшает начальный момент так же, как параллельное включение ее равносильно уменьшению сопротивления беличьего колеса; она уменьшает крутящий момент при скорости, равной половине синхронной. С другой стороны, короткозамкнутая обмотка индукторов помогает двигателю приблизиться к синхронной скорости, другими словами, она уменьшает его скольжение. По достижении синхронной скорости свойства асинхронного двигателя пропадают, т. обр. обмотка наподобие беличьей клетки должна только довести ротор до скорости, достаточно близкой к синхронной, чтобы дать возможность синхронизирующей силе машины поднять затем скорость до синхронной. Если С. д. имеет не явно выраженные полюсы (цилиндрич. магнитную систему), то магнитная обмотка выполняется в виде трехфазной обмотки. На фигуре 13 представлена схема пуска в ход трехфазного С. д. с цилиндрич. ротором: 1 — синхронный индукционный двигатель, 2 — возбудитель, 3— реле, 4 — автоматич. регулятор фаз. Для ограничения пускового тока к зажимам двигателя подводят пониженное напряжение (ок. 30% номинального); обычно понижение напряжения производится посредством автотрансформаторов. Кроме того в цепь якоря двигателя вводят еще реактивные катушки, которые служат для снижения ударного действия токов при переходе от пониженного напряжения к номинальному после вхождения двигателя в синхронизм (фигура 14, где 1 — синхронный двигатель,
2— автотрансформатор,
3— переключатель, 4— реактивная катушка).
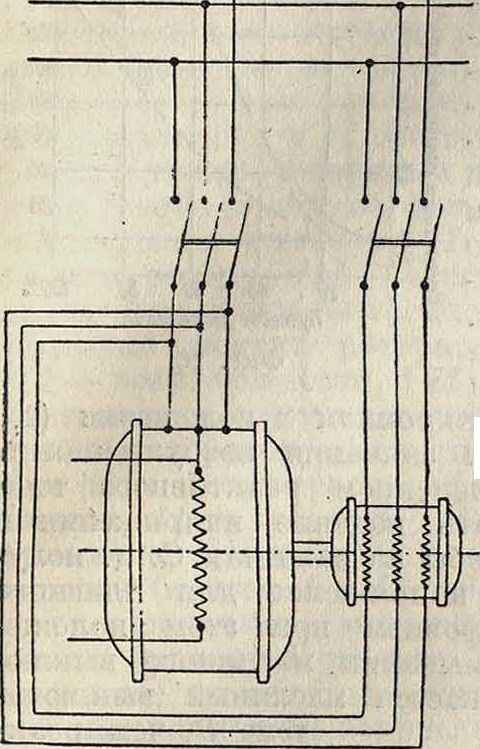
Уменьшение толчков тока при переключении достигается также путем введения омических сопротивлений или циклического перехода с одной ступени на другую. Ротор снабжен трехфазной обмоткой (фигура 15—16); два его кольца соединены непосредственно с пусковым реостатом. В цепь трехфазного кольца введен переключатель, посредством которого можно это кольцо ротора соединить ветвью пускового реостата или вводить в цепь ротора возбудитель. Начальный пусковой ток при асинхронном пуске в ход С. д. составляет обычно 100—130% номинального. Если двига-
Фигура 14. с третьей тель однофазный, то для пуска его в ход как асинхронного двигателя якорь его снабжается вспомогательной обмоткой.
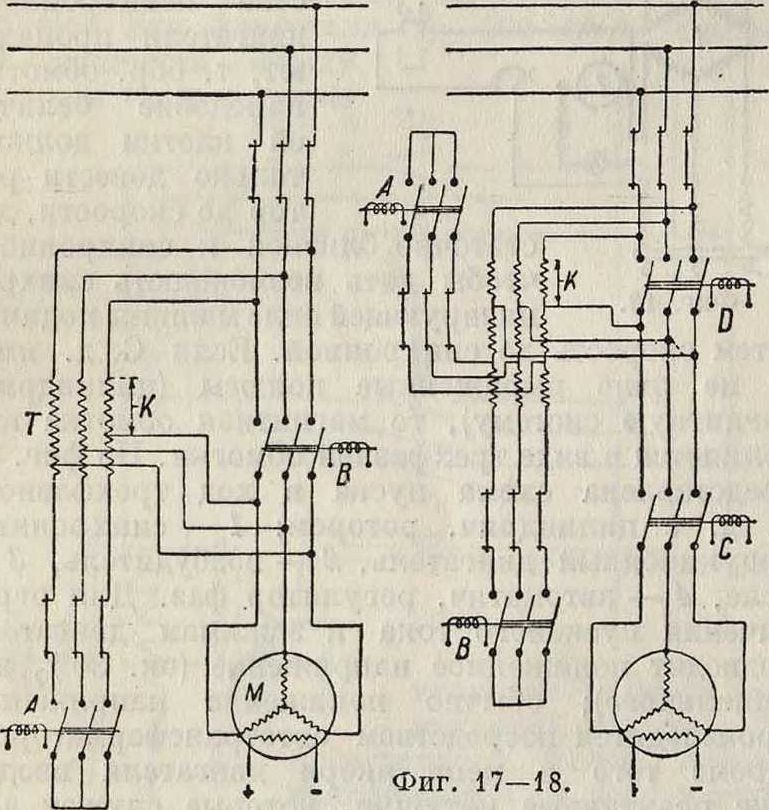
В последние годы получил довольно широкое применение пуск в ход по сист. Корндерфера. Схемы включения С. д. при асинхронном запуске по этой системе
| приведены на фигуре 17 и | |
| 18. Асинхронный способ | |
| пуска в ход по системе | |
| 1 | |
| 1JJLj | |
| м V
-Г- |
sfrtis |
Фигура 15.
Фигура 16.
Корндерфера имеет то преимущество, что здесь необходима установка только одного автоматического выключателя (масленника), требующе-
* 7. !5 о да
iso го го устройства ной камеры. Масляные выключатели А, В не разрывают токов короткого замыкания и потому м. б. облегченного типа, ^ на малую разрывную мощность. Манипу-||| ляции при пуске в ход по системе с одной “ 11| промежуточной ступенью напряжения (фигура 17) таковы: 1) цепь возбуждения С. д. М замыкается через реостат на возбудитель (значение м сопротивления возбудителя указывается для каждого типа отдельно); 2) замыкается масляный выключатель А и вслед за ним главный масляный выключатель D.. кг В этом положении С. д.
" оборот0« должен получить от ав-
тотрансформатора Т та-ФИГ кой процент напряже ния, который является достаточным для разлития полной скорости и синхронизации на этой ступени. Напряжение в цепи возбуждения должно предварительно подняться при развитии скорости до значения, соответству-
so ю

ющего положению реостата. Положение реостатов определяется при первых пусках на месте установки т. о., чтобы переход от асинхронного режима к синхронизму происходил с наименьшими воз- χ х
можными толчками |5о,—.——·————|20о тока; 3) размыкается £ масляный выключа-
тель А: в этом поло- g „„„„„ а·.,
жение линии распределяется между ча- |го стью автотрансформатора К, служащей “ Ю -реактором (смотрите), и 3 С. д. соответственно l.ft
| 1 | ||||
| 1 | ΰ | |||
| Ш | /. | |||
| У | ||||
| Ψ | ||||
160
140
120
го 40 60 80
Пусковое напряжение
Фигура 20.
100%
влению (импеданцу).
Если по каким-либо причинам С. д. не удалось войти в синхронизм в положении (2), правильным выбором значения возбуждения и соответственным изменением реактивного тока можно отрегулировать падение напряжения в реакторе К т. о., чтобы на зажимах С. д. получалось достаточное напряжение для плавного вступления в синхронизм при этом положении, то есть при размыкании масляного выключателя А; 4) замыкается масляный выключатель В, чем реактор замыкается накоротко.
Пуск в ход по схеме с промежуточными ступенями (фигура 18) осуществляется так. 1) Цепь возбуждения С. д. замыкается через рео-___ стат на возбудимо во 90 100% тель (значение со-противления ука-фиг· 2 · зывается для каж дого типа отдельно); 2) замыкается масляный .выключатель А и вслед за ним главный масляный выключатель D; в этом положении на зажимах С. д. получается минимальное значение напряжения и оно оставляется в этом положении до достижения предельной скорости, которую он может развить как асинхронный двигатель; при этом же положении напряжение возбудителя должно подняться до значения, соответствую- крутишйттпш щего положению рео-=стата; 3) размыкается | масляный выключатель 1?
л cJ
А; в этом положении % полное напряжение линии распределяется между частью авто-
20 30 40 50. Число оборотов
100
| Г | г | |||||
| 1 | /. | |||||
| и | Ψ | |||||
| у, | ||||||
0 10 20
30 40 50
Напряжение Фигура 22.
Ж
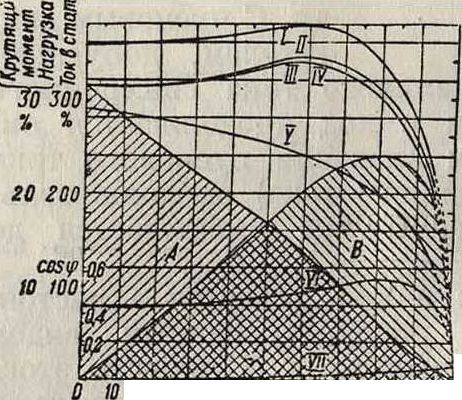
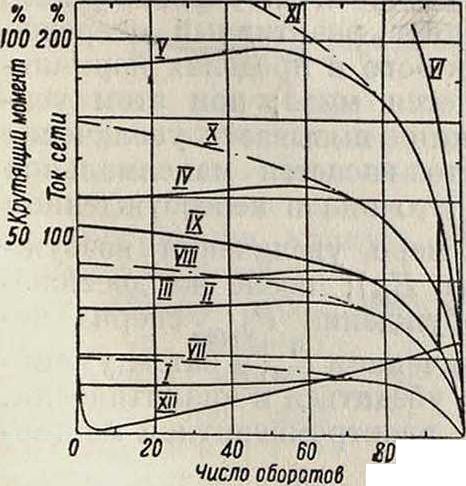
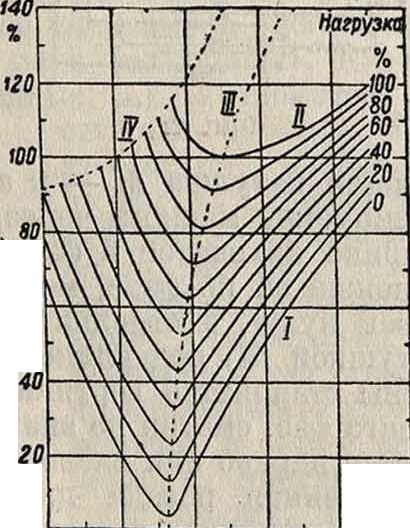
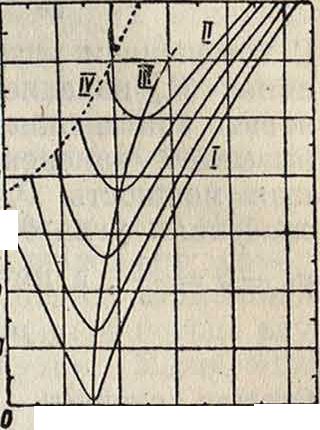
трансформатора К, которая служит реактором, и С. д. соответственно их полному сопротивлению (импеданцу) ; по истечении 2—3 ск. замыкается масляный выключатель В, чем устанавливается вторая промежуточная ступень напряжения на зажимах С. д., который при этом положении должен тотчас же войти в синхронизм; 4) размыкается масляный выключатель В, чем опять кратковременно· выключается часть автотрансформатора К как реактор, и сейчас же вслед за этим замыкается масляный выключатель С, замыкающий реактор накоротко, и на зажимах синхронной машины получается полное напряжение линии. Пусковые характеристики С. д. при асинхронном запуске представлены на фигуре 19—23. Значения кривых: на фигуре 19—I—ток в статоре,
II—коэф-т мощности, III—полезный крутящий момент; на фигуре 20—I — крутящий момент (в неподвижном состоянии), II — ток сети (С. д. в неподвижном состоянии), III — минимальное напряжение, при к-ром м. б. достигнут синхронизм (кривые I к II относятся к пуску в ход с разомкнутыми роторными обмотками), а — момент трения покоя; на фигуре 21 — I — мощность, поглощаемая статором, II — мощность, передаваемая ротору, III — мощность по кривой II за вычетом потерь на трение и вентиляцию, IV — полезный момент ротора, V — ток в статоре, VI — коэф. мощности, VII — потери на трение и вентиляцию, заштрихованная площадь А — потребленная ротором энергия, В — избыток энергии (идет на ускорение); фигура 22—I—крутящий момент, II — ток сети, III — минимальное напряжение, при к-ром С. д. может быть синхронизирован (кривые I η II относятся к пуску в ход с разомкнутыми роторными обмотками), а — момент трения покоя; фигура 23—I—VI—пусковые крутящие моменты для различных чисел оборотов при частоте 50 пер/ск. и пусковом напряжении в 20; 30; 33,3; 40; 50 и 60% от нормального напряжения, VII—XI—ток сети для кривых I—V, XII—крутящий момент холостого хода .вентилятора.
В нек-рых случаях пуск в ход С. д. осуществляется от особого синхронного генератора, к-рый для питания С. д. может доставлять ток переменной частоты (от 0 до номинальной). С этой целью С. д. соединяется электрически с генератором; при этом как генератор, так и С. д. возбуждаются. Если при таком соединении приводить во вращение синхронный генератор (например посредством паровой турбины), то увлекаться во вращение и связанный с генератором. Для создания наибольшего пускового момента необходимо генератор возбудить возможно сильнее, причем С. д. должен иметь возбуждение в два раза слабее.
Диаграммы напряжений. Элек-трич. машины, работающие как двигатель, потребляют электрич. энергию, поэтому развиваемая двигателем электромагнитная мощность получается отрицательной. Т. к. электромагнитная мощность определяется
Рт=тЕт I cos ψ, (3)
где т— число фаз, Ет—напряжение, соответствующее потоку возбуждения Фт, I — фазовая сила тока, ψ—угол сдвига фаз, то при отрицательном значении мощности cos ψ должен быть меньше 0 и следовательно 270° > ψ > 90°. На фигуре 24— 26 приведены векторные диаграммы напряжений для различных внешних углов сдвига фаз
т вместе С. д.,
Фигура 23. с ним будет электрически между приложенным напряжением V и током 1. Как видно из этих диаграмм, если С. д. перевозбужден, то ток опережает напряжение; при невозбужденном состоянии, наоборот: ток получается отстающим по фазе от напряжения,
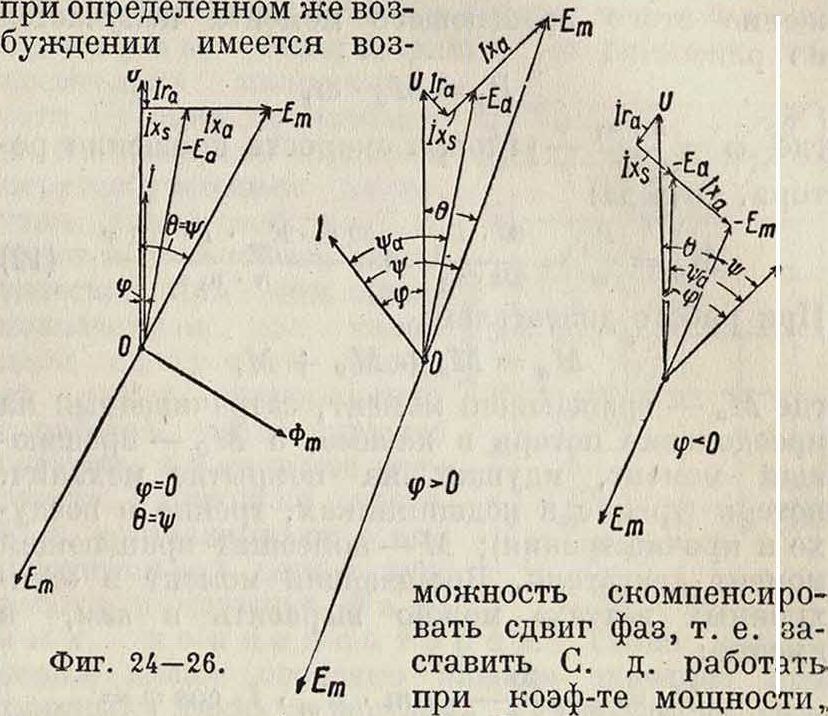
равном единице (cos ψ=1). Т. о. регулировкой возбуждения имеется возможность воздействовать у С. д. на реактивную составляющую тока. Из векторных диаграмм видно также, что вектор приложенного напряжения U во всех случаях опережает вектор напряжения Ет, создаваемого основным потоком возбуждения Фт.
Мощность С. д. Из диаграмм, приведенных на фигуре 24—26, можно получить выражение:
1) для мощности, потребляемой двигателем:
Ρ1=ηι·υ·Ι· cosy; (4)
2) для мощности, передаваемой статором ротору,—для электромагнитной мощности С. д.:
Ра=т · Еа · 1 cos у)а — т· Ет · I · cos ψ (5)
эта мощность равна мощности Р, уменьшенной на величину джоулевых потерь в статоре Ру.
Р„=Рт=1 — т Рга=рх — Ру (6) эта мощность носит название также синхронной мощности; 3) для мощности, передаваемой на вал С. д.; эта мощность получается из электромагнитной после вычета потерь в железе, то есть
Р=Ра-Ре; (7)
4) для механической, или полезной, мощности, равной
P=Px-Pj-Pe~Pe, (8)
I
где Ра—механич. потери. Если обозначить посредством za синхронное кажущееся сопротивление обмотки якоря, через yik — угол сдвига фаз при коротком замыкании (arc tg
г то выражения для всех видов мощности можно представить так:
Pi=m · -j— [U cos — Em cos (yik — 6)]; (9)
za
Pa=Pm=m ~ [U cos (yk Θ) Em cos %], (10)
О
или приближенно, полагая, что Ру=0, и Е из
Pl=P а=Рт=Sin θ=—sine, (11)
где b=--коэфициент, характеризующий возбуждение синхронного двигателя.
В р а щ а ю щ и и момент С. д. Электромагнитная мощность С. д. Рт=Ра, развивающаяся в машине при синхренном вращении, дает вращающий момент Ма, носящий название м о-мента в синхронных ваттах. Выражение этого вращающего момента получается из равенства
Ра=Ма- со,
где ω=а-^· — угловая скорость вращения ро тора. Отсюда: Р,
Ма=
60 Р
30 тонн Ет · I · COS V п · щ
(12)
2л · п±
При работе двигателем
Ма=Ме + Mg + М,
где Ме — вращающий момент, затрачиваемый на преодоление потерь в железе, а Ме—вращающий момент, идущий на покрытие механич. потерь (трение в подшипниках, трение в воздухе и прочие трения); М — полезный вращающий момент двигателя. Вращающий момент в «синхронных ваттах» можно выразить в килограммахм, а именно:
Мл=30 .щ.Е,
9,81. я.
= 0,974. —. Е-
п п
«1
• I cos ψ=Р_
• I · cos ψ — 0,974
»1
•(13)
Выражение (12) можно написать и в ином, иногда более удобном практически виде, если вставить в него выражение для Ет:
Ет=if в- fWl· fy · · w · Фт -.10-», а именно:
2 Г мα= —m-fB-1Wi-fy-f-w0m-I· cosy-lO-8 =
= А Фт I. cosy. (14)
Если в выражение (12) для Рт вставить выражение (10), то легко увидеть, что Ма зависит от угла 0. Кроме того легко убедиться, что при нек-ром 0 вращающий момент имеет максимум. Для определения Λ1βηωχ находят значение угла 0, при котором он имеет место:
= с т ^ [— U-sin (щ — 0)]=0,
а
sin (у“ —0) =0, грк — 0=0, θ=Ψί,
так что
М„=с
°тах
m-f[U-Ew
cosy*]. (15)
Так как о->
то
М„
0,974
Щ
U
кгм. (16)
Этот вращающий момент носит название опрокидывающего момента, т. к. с увеличением нагрузки С. д. вращающий момент, развиваемый им, несмотря на увеличение 0 уже не возрастает, а уменьшается, т. e. С. д. не может преодолеть даваемой ему нагрузки и выпадает из синхронизма. Для увеличения перегрузочной способности С. д. необходимо стремиться, с одной стороны, к уменьшению его za, а,
с другой стороны, к увеличению отношения га
(к увеличению у“). Уменьшение za должно следовательно достигаться за счет гл. обр. уменьшения активного сопротивления якоря га.
Выражение (16) показывает, что максимальный вращающий момент С. д. зависит от его возбуждения. Для того чтобы убедиться, какое влияние на Матах имеет возбуждение двигателя (то есть величина Ет), следует воспользоваться не приближенным выражением (16), а точным его выражением (15), взяв первую производную его noi?^; при этом находят, что это выражение дает максимум при
Е„.
U
2 COS ψ.
Так что
(М _ “ Г п Щ — иг м7
атах/max 2ωζ · COS ψ, I 2 1 4сиг ’
a T к L -I a
так как
za · cos гр=ra.
Из этого выражения видно, что максимум опрокидывающего момента не зависит от реактивного сопротивления якоря и что он обратно пропорционален активному сопротивлению якоря. Следует заметить, что под га необходимо понимать не только активное сопротивление самого якоря, но и всей цепи от тех точек, между к-рыми поддерживается генератором, питающим двигатель, постоянное напряжение U.
Влияние возбуждения на работу С. д. У С. д., как у всякой параллельно работающей синхронной машины, при регулировке возбуждения изменяется только реактивный ток. Здесь можно различать три случая: 1) С. д. не возбужден (Em < U), при этом для всех нагрузок (от холостого хода до полной) двигатель потребляет из сети кроме активного тока, реактивный отстающий ток; 2) С. д. возбужден нормально (Ет=U), при этом двигатель для всех нагрузок берет из сети небольшой реактивный опережающий ток; 3) С. д. перевозбужден [Ет> U), он потребляет реактивный опережающий ток, величина которого в пределах нормальной нагрузки колеблется мало; при этом усиление перевозбуждения вызывает увеличение реактивного тока. Что касается максимальной мощности С. д. Ратах> т0 она в невозбужденном двигателе растет но мере увеличения возбуждения (с увеличением Е„) после же достижения нормального возбуждения Р„ сперва не-
WVXX
сколько растет с увеличением Ет, а затем уменьшается. В этом можно убедиться и аналитически. Из выражения для электромагнитной мощности (10) получается:
р«тах=т ~ IU — Ет cos щ при 0 =¥>*.
а
Это выражение достигает максимума при Ет —
2 eos V*
(Р _ЗИ. атах)тах— 4 г
Следовательно максимальный вращающий момент (Ма ) достигает своего наибольшего
v max/max
значения:
(ма
) =—·
ху max 4 cor
Из (17) видим, что (Ма ) изменяется об-ратно пропорционально га, то есть, что активнее сопротивление в цепи С. д. сильно влияет на значение его максимального вращающего момента. Отсюда становится понятным, почему перегружаемость С. д., питаемого от станции по длинной линии (С большим активным сопротивлением), м. б. весьма незначительна несмотря на то, что С. д. сам по себе является впол-
не нормальным в отношении его способности перегрузки. Нормально С. д. строятся так, чтобы их максимальный вращающий момент превосходил номинальный вращающий момент приблизительно в два раза (коэф. перегрузки==2). Случайные перегрузки, всегда практически могущие иметь место, обычно не достигают 100%, а потому выпадения из синхронизма от перегрузки нормально не могут встречаться. Это справедливо, когда С. д. связан с генератором проводами с относительно малым активным сопротивлением. Из упрощенной диаграммы напряжений для С. д. можно установить, что
U2—Е2т—Рага—2Ра·=2*я У(Ет1У-Рb (18)
Это выражение связывает между собой и с постоянными параметрами машины (ra, ха, ζα) все величины, характеризующие условия работы С.д., а потому оно носит <° название основного уравнения работы С. д. В основное ур-ие входят величины E, U, I, Ра, которые могут изменяться. Если поддерживать постоянными U и Ет, то получающаяся при изменении Ра связь между Раи представляет рабочую характеристику С. д. Поддерживая постоянной электромагнитную мощность Ра при постоянном напряжении U, получают I=f[Em). Кривая, изображающая эту зависимость, походит на латинскую букву V и носит название V-образной кривой. Для каждого значения Раполучается своя V-образная характеристика. Из уравнения следует, что при Ра=0
Фигура 27.
Z72-
+ 2х„ · Е„. · 1.
(19)
ε во
Последнее выражение представляет ур-ие эллипса (два эллипса: один при знаке +, а другой при знаке —). Эти эллипсы представлены на фигуре 27, причем их ветви О fi и 002 образуют V-образную кривую для Ра=0, соответствующую устойчивому режиму работы С. д. Обычно У-образные кривые строятся не как I— f (Ет)> а как I =
= <Р (lт), где 1т — ток возбуждения, т. к. при экспериментальном исследовании С. д. не представляется возможным измерение напряжения Ε,η- Кривые I=φ (im) несколько отличаются от кривых /= (Ет).
Зависимость между током в якоре и током возбуждения для С. д. графически также представляется в виде V-обра-чшх кривых (кривых Морлея). Типичные V-образные кривые приведены на фигуре 28 и 29. Значения кривых на фигуре 28 и 29: I — кривая при холостом ходе, II —кривая при полной нагрузке, III — линия для cos φ== 1, IV — опрокидывание (двигатель выпадает из синхронизма). Из V-образных кривых видим, что С. д. может служить в качестве с и н-
о го го so so wo ао ш т чотг.
Ток возбуждения ФИГ. 28.
40 80 120 160 200%
Возбуждение
Фигура 29.
хронного компенсатора фаз тока, то есть он может посылать в сеть реактивные отстающие токи. Перевозбужденный С. д., предназначаемый для компенсаций реактивных отстающих токов и играющий т. о. роль емкости, называется синхронным конденсатором. Генерирование отстающего (относительно напряжения сети U) тока производится большим или меньшим перевозбуждением двигателя. Такое свойство С. д. часто используется прак-, тически. При этом пред-назначенная для такой | цели синхронная маши- Г на может одновременно 41 -с работой компенсатором служить и в качестве двигателя. Довольно часто С. д. устанавливают с исключительной целью для работы в качестве ф а г-ных компенсаторов. Такие применения имеют особенно важное значение при длинных линиях передач. Устанавливая синхронные компенсаторы на подстанции в конце линии передач, мы получаем возможность генерировать в линию передачи отстающие (от напряжения сети) реактивные токи, потребные для линии, и освобояодать или хотя бы уменьшать т. о. для станционных генераторов необходимость работать при низком cos φ. Вместе с тем при этом уменьшается и падение напряжения в самой линии передачи, что, с одной стороны, уменьшает расход меди на линию передачи и, с другой стороны, уменьшает потери энергии в линии, то есть повышает кпд линии.
Влияние изменения напряжения и частоты на опрокидывающий момент. При падении напряжения опрокидывающий момент Л1атах уменьшается:
Ма =Ма ·(20)
атах атах 100
где еи—%-ное падение напряжения. Отношение опрокидывающего момента к номинальному: юо-«
k=k-
10ο
(21)
(22)
нормально при
cos φ=0,8 А:=2,1 cos φ=0,9 ft=1,9 cos φ — 1,0 ft=1,5
Изменение частоты на величину Sf вызывает ускоряющие моменты, равные
f 1
Му
2 9,81
GD2
Р .100
(23)
Свободный опрокидывающий момент под действием изменения частоты и напряжения равен
. « 100-6 М.=Ма
атах "та
100
Му
Для устойчивой работы необходимо, чтобы М" > Ма.
аmax атах
Устойчивость работы С. д. Под действием изменения внешнего момента сопротивления система ротора смещается относительно вращающегося поля статора, при этом при изменении внешнего момента на км угол смещения вырастает на величину ΔΘ, обусловленную синхронизирующей мощностью двигателя. Синхронизирующая мощность Р8 характеризует упругие свойства связи между ведомой и ведущей частями С. д. Математически под синхронизирующей мощностью следует понимать производную от синхронной мощности по углу смещения Θ, то есть
dP Е и
P.^sfstm· — sin (у“-в). (24)
С изменением угла Θ синхронная мощность машины Ра изменяется так, чтобы противодействовать той внешней для машины причине, которая вызывает изменение угла Θ. Синхронизирующая мощность Р8 неодинакова при различных значениях угла θ она достигает максимума при
ψк — Θ=~, а именно:
£ · U
(25)
~а
Отсюда следует, что максимальная синхронизирующая мощность С. д. пропорциональна максимальной синхронной мощности машины; таким образом чем больше перегрузочная способность С. д. р ь — “таг,
* Ра
“норм. тем больше и ее синхронизирующая мощность. Как показывает формула (24), с увеличением угла Θ Р8 уменьшается и при вк — ук она делается равной нулю; при Θ > yik синхронизирующая мощность становится отрицательной, то есть в этом случае С. д. делается неспособным противодействовать изменениям нагрузки и работа его делается неустойчивой. Зависимость Ps от угла 0 для С. д. представлена фигура 30, из которой видно, что синхронизирующая мощность имеет наибольшее значение при б зё 0; это значит, что С. д. работает наиболее устойчиво при холостом ходе. По мере увеличения угла б, то есть с увеличением нагрузки, устойчивость работы
С. д. постепенно падает к при б=у>к si ; не-
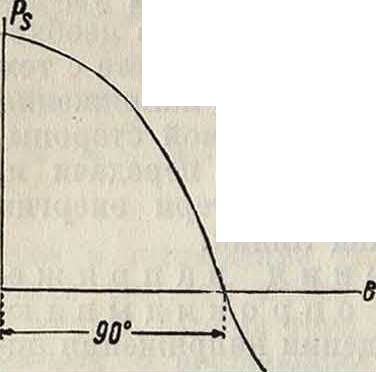
Фигура зо. большие нагрузки способны выбить С. д. из синхронизма. Если С. д. приводит в движение машины, станки и тому подобное., которые создают противодействующие моменты, периодически изменяющиеся, то ротор С. д. приходит в колебательное состояние, причем амплитуда колебаний зависит не только от амплитуды пульсации внешнего момента, но также и от соотношения периодов собственных и вынужденных колебаний. Для устойчивой работы С. д. как правило период собственных колебаний должен быть минимум в два раза более периода вынужденных колебаний. Период собственных колебаний С. д. определяется по формуле:

где GD2 — маховой момент вращающихся масс, выраженный в килограммахм2, Рп — номинальная мощность двигателя в kW.
Лит.: К у л е б а к и н В., Испытание электрич. машин, If., 1928; Толвинский В., Синхронные машины, Л., 1923; Л ю с т Г., Синхронные машины, Л., 1932; Arnold E., Die AVechselstromtechnik, В. 4, Die synchronen Wechselsifommasehinen, В., 1923; Richter R., Elektrische Maschinen, Band 2, Berlin, 1930; R’ziha P. u. Seidener J., Starkstromtechnik, 6 Auflage, Band 2, Berlin, 1932. B. Kjacfianiiu.