 > Техника, страница 83 > Судостроительный опытовый бассейн
> Техника, страница 83 > Судостроительный опытовый бассейн
Судостроительный опытовый бассейн
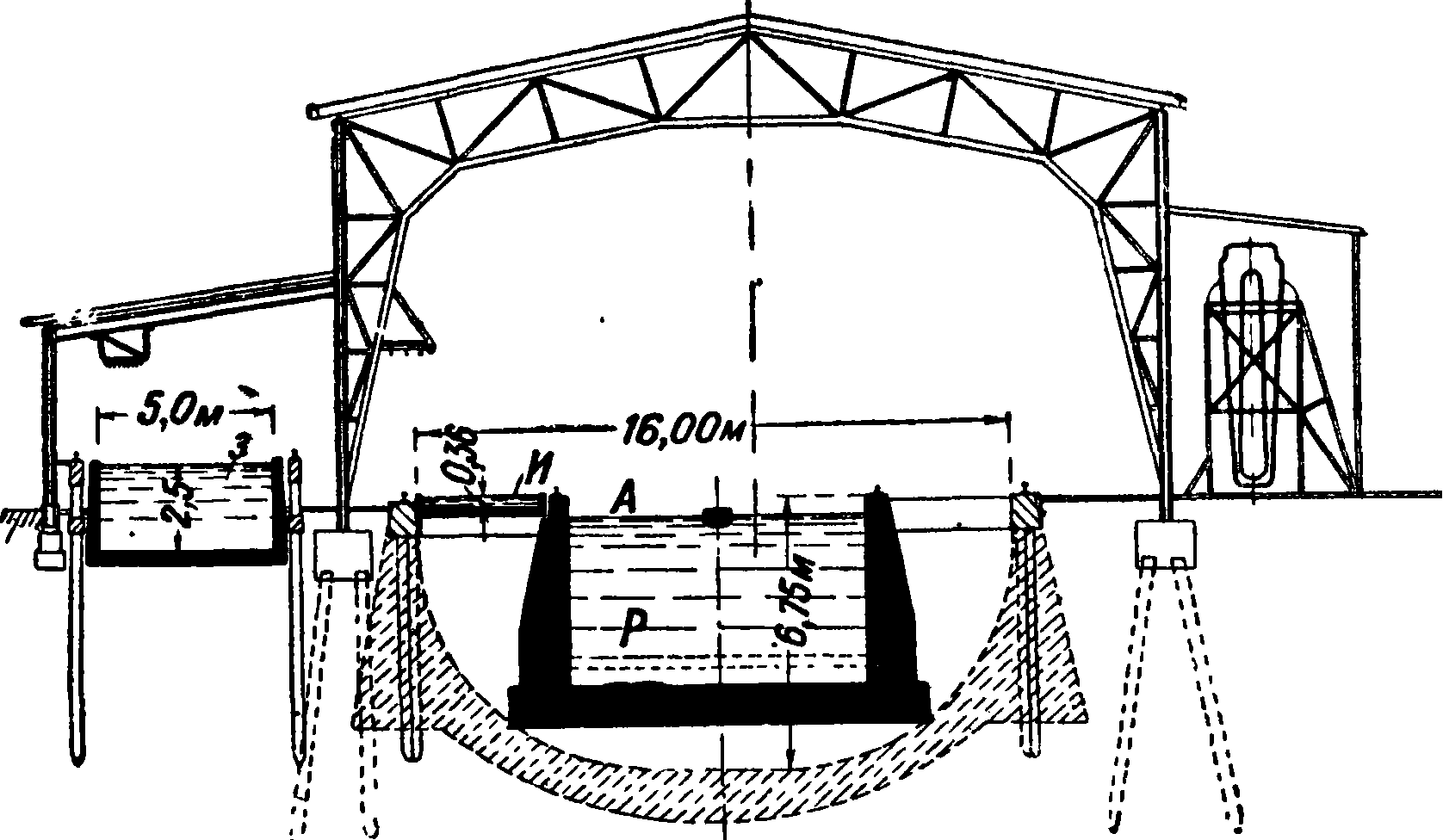
Судостроительный опытовый бассейн, научно-исследовательское учреждение, изучающее вопросы сопротивления воды движению судна и действия судовых движителей путем испытания моделей таковых, приводимых в движение в специальном искусственном канале. С. о. б. делятся на: 1) бассейны с тележкой (сист. Фруда) и 2) бассейны без тележки (сист: Велленкампа). Практическое применение нашли себе С. о. б. системы Фруда. На фигуре 1 изображен в плане и разрезе С. о. б. в Гамбурге (Hambuigische Schiffbau-Versuchsanstalt): 1— помещения для кабинетов, бюро, чертежной, архива и т. д., а—мастерская для обработки моделей, б—механич. мастерская, в—столяр-
новлена на среднюю тележку, которая затем поднимает судно, довозит его до продольного

ная мастерская, г—насосная, д—отопление,. е—склад горючего, а/с—распределительная доска, з—помещение аппаратуры высокого напряжения, и—ум-формерная, % — аккумуляторная, л—фильтры, м—лекционный зал, и—уборные, о—мастерские гидроавиационного канала; А—узкая часть главного канала, В—широкая часть главного канала, Вг и В2— посты управления главной тележной, Г-^стеклянный бассейн, Д и Е—передние и задние
ж пути, после чего судно сдвигают в сторону, и поперечная тележка освобождается дтя приема следующей продольной тележки. Для передвижения тележек имеются Мощные диферентные бассейны, Жг и Ж2—шлюзовые ворота, 3— гидроавиационный бассейн (для испытаний при больших скоростях), И—мелководный бассейн, К—кавитационный танк, Л—большая главная тележка, М—малая главная тележка, Н—прицепная тележка для опытов в мелководном бассейне, О—тележка для высоких скоростей, П—волнообразователь, Р—подъемное дно.
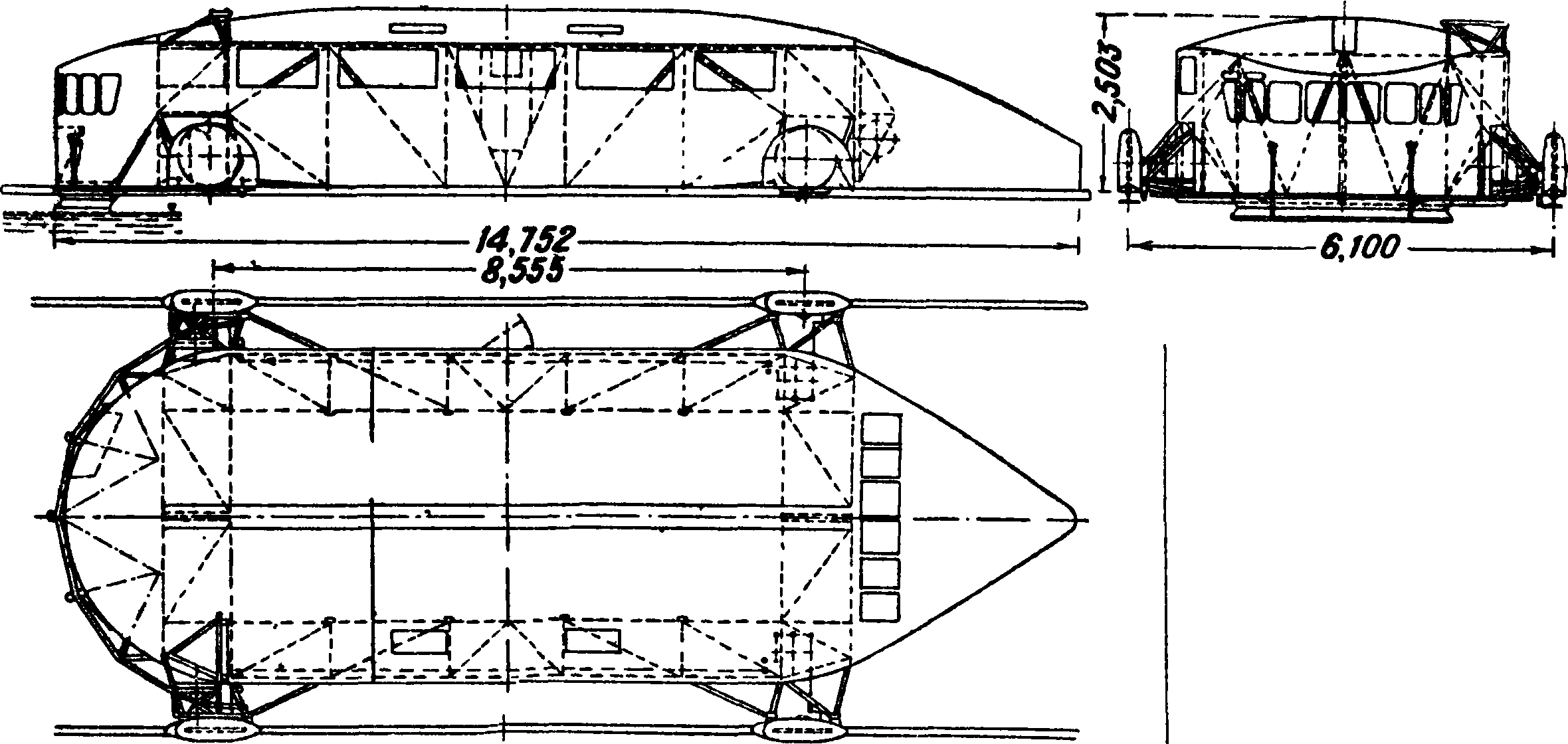
Основной частью бассейна Фруда является бетонный канал А (л о т о к) (фигура 1), наполненный водой и расположенный обычно внутри специального здания“ По рельсам, проложен-
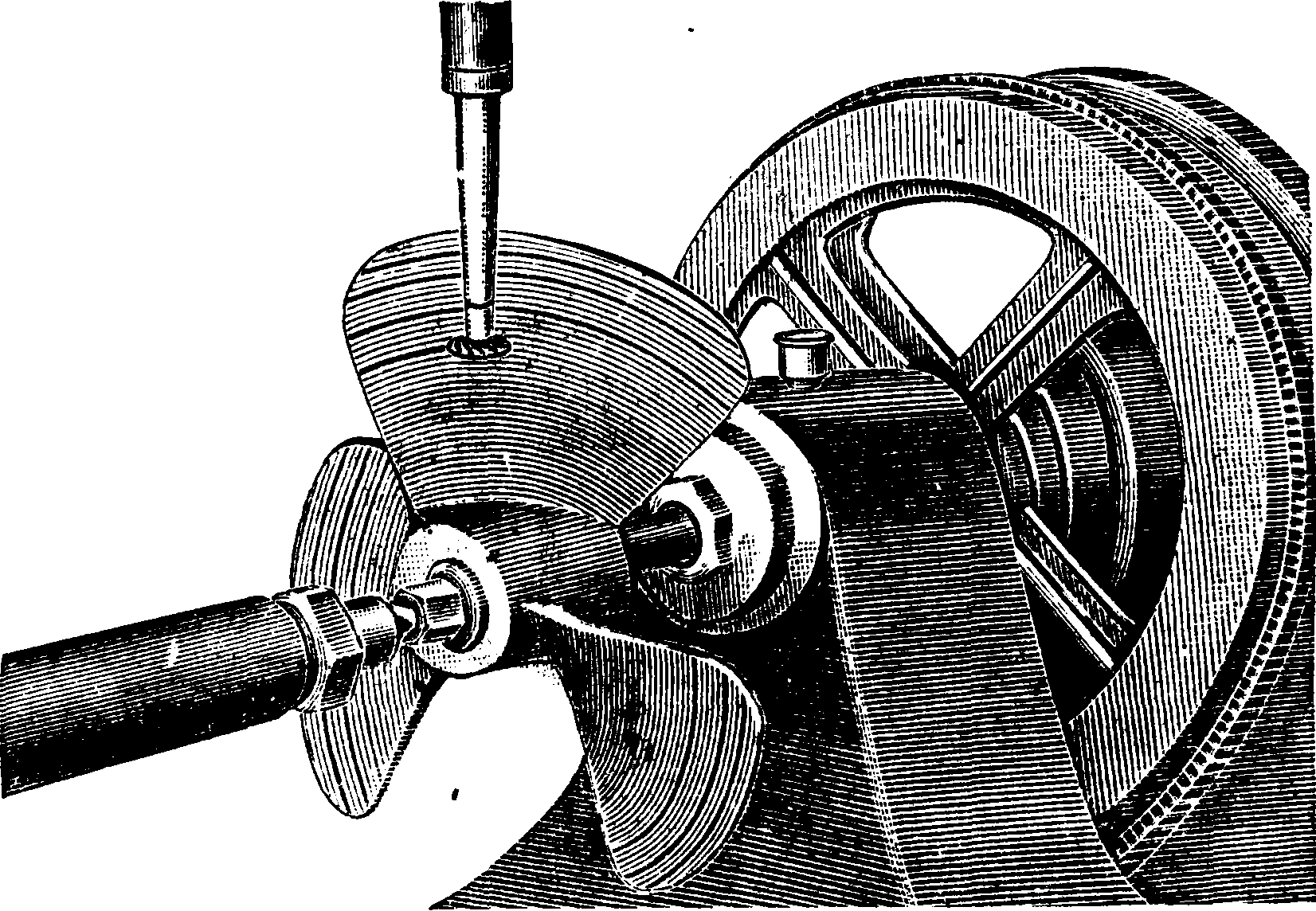
ным по берегам бассейна, движется тележка М, перекрывающая ширину канала наподобие мостового йрана и служащая для буксирования моделей судов и производства измерений. Размеры лотка у различных бассейнов различны: длина от 100 до 350 м, ширина 6—16 м, глуби-
(фигура 2). Источником электроэнергии в целях сохранения постоянства напряжения является обычно аккумуляторная батарея, заряжаемая городским током. Встречается непосредственное питание тележки

Фигура 1.
на 3—7 метров Наибольшая скорость тележки от
4—20 м/ск. Основные испытания, производимые в С. о. б.: 1) буксировочные — для определения сопротивления воды движению модели судна; соответствующая измерительная аппаратура — буксировочный ; инамометр—находится на тележке; 2) испытания моделей гребных винтов в свободной водеДвинтовой динамометр на ^ тележке); 3) испытания моделей гребных винтов совместно с моделью корпуса судна (самоходные испытания); аппаратура устанавливается непосредственно на модели. Помимо основных производятся следующие испытания на моделях: а) по определению попутного потока, б) по исследованию действия рулей и по циркуляции судна, в) по изучению качки судна и др.
Фигура 2.
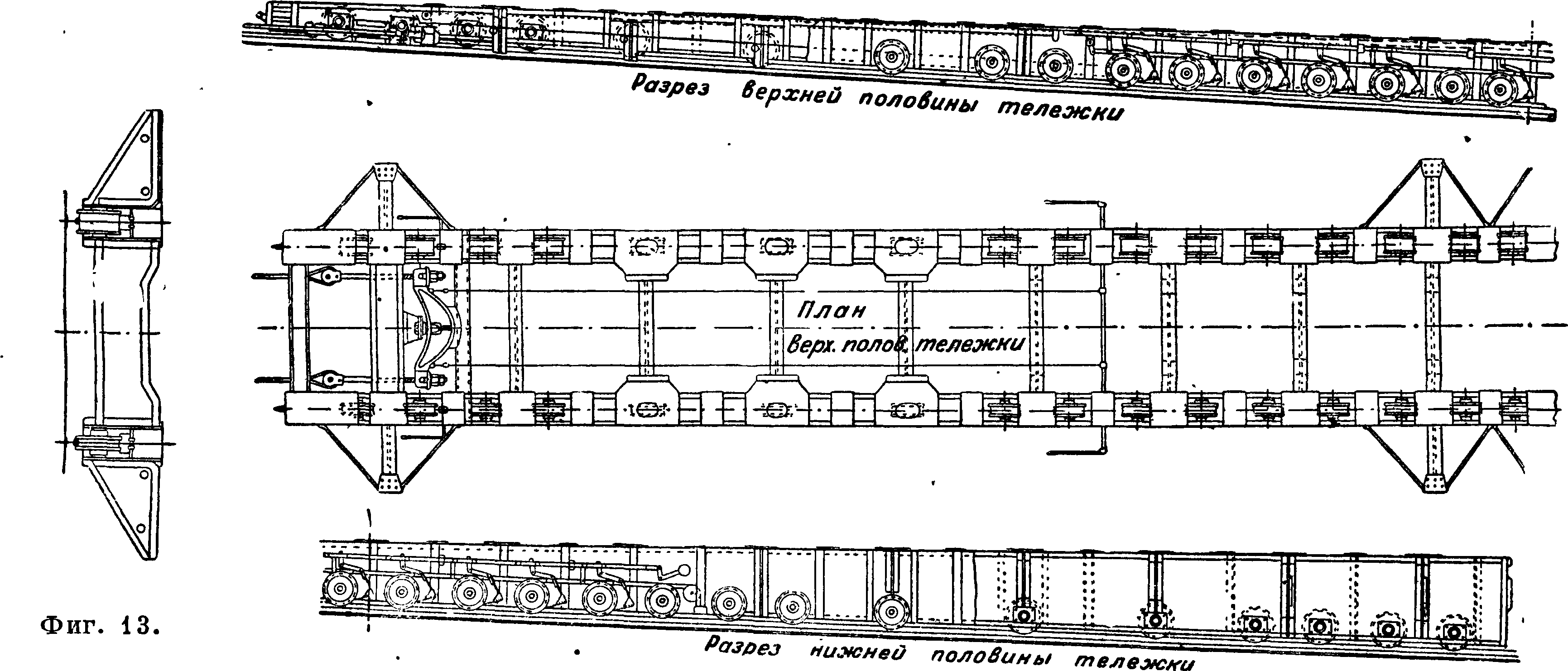
Фигура 3.
Тележка (фигура 3) состоит из стальной, железной или дуралюминиевой конструкции, перекрывающей * бассейн и опирающейся на 2 пары колес, каждое из которых имеет автономный электромотор. Вращение всех 4 электромоторов синхронизировано. Питающий ток для электромоторов снимается с тролейных проводов в последнее время аккумуляторную батарей заменяют специальной электромашинной установкой, обеспечивающей постоянство напряжения (Рим). Вес тележки от 7 m (и меньше) до 20—25 ш. В настоящее время угловое железо в качестве материала тележки начинает вытесняться трубами с целью уменьшения веса тележки и сокращения участка ее разгона (до приобретения постоянной скорости) и торможения, то есть сокращения потребной общей длины канала. Для регулирования скорости тележки имеется контроллер, устанавливаемый обычно на берегу в- конце канала (Вена, Рим, Берлин) или на половине длины (Гамбург, Москва). Есть случаи установки контроллера на самой тележке (Ленинград). В случае установки поста управления на берегу применяется сигнальная система (лампами) для ориентировки поста управления о положении тележки.
Торможение тележки осуществляется обычно электрич. тормозом и кроме того механич. (иногда пневматйч.). Механич. тормозное устройство в римском С. о. б. состоит из 2 шин полосового железа, уложенных параллельно рельсам в конце канала и имеющих на 5 метров длины подъем на 3 миллиметров. На .эти шины опираются лапы тележки, трением которых о поверхность шины осуществляется торможение. Скорость тележки определяется по записям отсчетов времени и пути. Последнее осуществляется с помощью реле, замыкание которого производится контактами, расположенными вдоль канала на равных расстояниях. Реле соединено с пером, делающим отметки на барабане динамометра, на котором делается запись сопротивления. На том же барабане аналогичным способом записывается время; замыкание реле осуществляется в этом случае контактными часами. Определение скорости по диаграмме производится путем сопоставления записей пути и времени. Динамометр для буксировочных испытаний в основном состоит из пружинных или рычажных весов, служащих для измерения горизонтальной силы сопротивления воды движению модели судна. Модель связывается с рычагом динамометра стержнем (жесткая-связь) или шнурком (гибкая связь). Удлинение пружины, пропорциональное силе сопротивления, записывается рычагом, связанным с пружиною ш несущим в свою очередь перо, вычерчивающее кривую сопротивления на бумаге, навернутой на вращающийся барабан.
Современный динамометр имеет кроме того контактное устройство, позволяющее производить измерение’сопротивления при помощи слабой пружины и уничтожать мелкие колебания на кривой записи. Для уничтожения колебаний модели имеется масляный д е м-
пфер. Диаграмма сопротивления обрабатывается путем планиметрирования площади кривой сопротивления; частное от деления этой площади на абсциссу принимают за сопротивление модели. Иногда вместо планиметрирования кривой сопротивление определяют непосредственно путем отыскания точек равновесия на кривой сопротивления. Динамометр винтовой имеет назначением испытания модели винта в свободной воде и дает возможность измерять вращающий момент М и упорное давление Р винта. К этому еще присоединяется измерение числа оборотов N тахометром и скорости тележки V (запись на барабане). Эти 4 величины определяют действие винта. Винт приводится во вращение от электромотора,стоящего на тележке, число оборотов регулируется наблюдателем с помощью реостата им. б. произвольно установлено (независимо от скорости тележки); в этом заключается отличительная особенность испытаний в свободной воде. Это дает возможность исследовать винт при различных режимах (тогда как при установке на корабле или на самоходной модели скорость и число оборотов взаимно связаны и притом так, что относительная поступь изменяется лишь в очень малых пределах). Для измерения упора гребной вал (несущий модель винта) имеет возможность перемещаться вдоль своей оси на несколько миллиметров и связан с коромысловы-ми весами, с помощью которых и определяется осевое усилие воды на винт, то есть, упорное давление. Измерение вращающего момента производится или применением передачи, аналогичной таковой для упорного давления, или измерением мощности электромотора. Обработка испытаний состоит в составлении диаграммы постоянных Кг, К2 и кпд η винта к _ Р, к _ М PV _ Κχλ
111 ~~ еп2Р4> 6n2D5^ М-2лп~~ К22л 9
где D—диаметр винта, ~п—секундное число оборотов, ρ—массовая плотность воды, построенная в функции относительной поступи
А =
nD
где V—скорость тележки. Удобство применения этих величин Κΐ9 К2, η, А в том, что
Фигура 4.
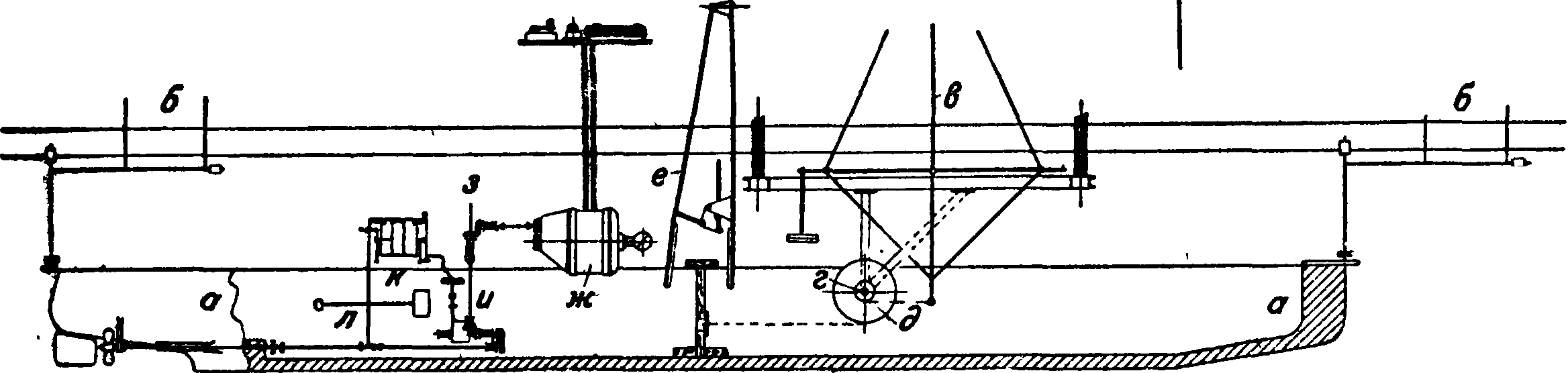
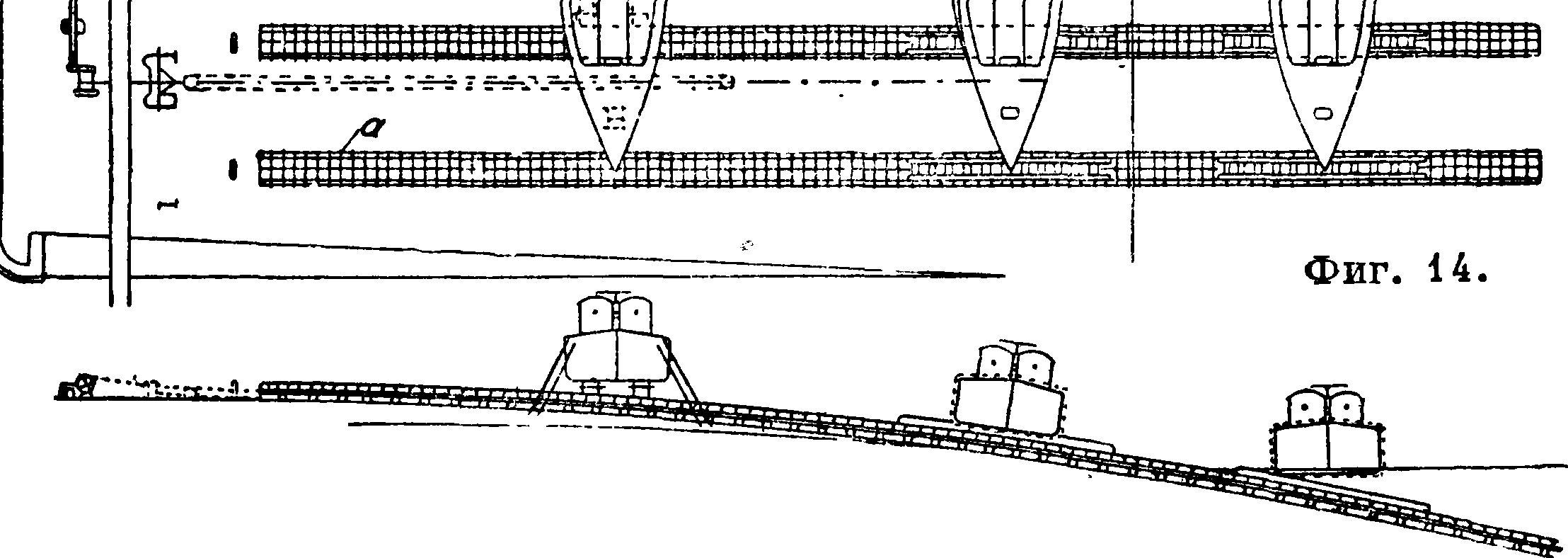
они не зависят от масштаба модели, и диаграммы годятся для всех геометрически подобных винтов без каких бы то ни было пересчетов. Динамометр для самоходных испытаний является тем же винтовым динамометром, но приспособленным для установки на самой модели, то есть облегченным по весу и уменьшенным по размерам. Для измерения вращающего момента в этом случае применяется иногда пружина, включаемая между ведущим валом электромотора, стоящего на модели (а в случаях малых размеров модели— на тележке), и ведомым, то есть гребным, валом. Угол закручивания пружины, пропорциональный вращающему моменту, измеряется путем преобразования углового перемещения в поступательное и записи последнего на барабане. На фигуре 4 изображена аппаратура самоходных испытаний венского С. о. б. Модель судна а подвешена к тележке шарнирными уравновешенными тягами б, б. Дополнительное усилие для преодоления избыточного сопротивления трения создается весами в, связанными с моделью нитями, перекинутыми через барабаны гиб. Щипцы е служат для жесткого связывания модели с тележкой; винты приводятся в движение мотором ж через конич. зубчатки з, динамометр и, регистрирующий на барабане к вращающий момент винта; упорное давление последнего регистрируется на том же барабане пружинным динамометром л. Помимо динамометров, регистрирующих упорное давление и вращающий момент, применяют также визуальные указатели. Модель при самоходном испытании идет под тележкой, скорость которой записывается обычным образом. .Число оборотов модели винта регулируется реостатом до совпадения скорости модели со скоростью тележки, после чего производится’ измерение. Т. к. регулировка скорости модели требует еще известного времени уже после установления постоянной скорости тележки, то длина бассейна при самоходном испытании должен быть значительной. Если модель совершенно свободна, то“ условия подобия с натурой оказываются заведомо нарушенными. Причина в том, что сопротивление трения модели rmi не подчиняющееся закону подобия, у модели относительно больше, чем сопротивление трения Ет корабля, то есть
гт > -*? (1 * &—масштаб модели).
Следствием этого является перегрузка винта, модели, работающего т. о. не при режиме подобия. Для достижения последнего применяется создание горизонтального усилия, являющегося дополнением к упорному давлению винта; усилие это делается равным избыточному сопротивлению трения. Т. о. винт работает· при том же скольжении, что и в натуре. Определение такого режима подобия м. б. произведено и иначе—путем жесткого связывания модели с тележкой, что создает возможность испытания винта при различных скольжениях^ то есть так же, как в свободной воде, но в условиях его совместной работы с корпусом. Интерполированием можно затем определить любой режим. Этот же метод дает возможность исследовать взаимодействие винта и корпуса, являющееся по настоящее время мало исследованным. Пересчет на натуру, то есть определение для судна величин, которые были измерены для.моде-ли, или определение нужной мощности механизмов судна производится по настоящее время по методу Фруда (смотрите Теория подобия). Сопротивление судна определяют по формуле
Rn=Rm + R0=+ (rn -
где Rn, Rm и R0 соответственно сопротивление судна полное, трения и остаточное, /с и fM — коэф-ты трения судна и модели, S—смоченная поверхность судна, vc и vM—скорости судна и модели, гп—полное сопротивление модели, s— смоченная поверхность модели, к—отношение линейных размеров судна и модели. Для пересчета мощностей с результатов испытаний
У
при соответственных скоростях vtм. б. применена след, ф-ла:
N,=0,0068592 · /с3^ · r„ V,
0,5144
0,0068592 · fc8 — ·
- 0,00203925 γ (fc°’°875 λ*- Яс) SF2,285.
где Ne—эффективная мощность на валу винта судна, ус и γΜ—уд. в окружающей воды для судна и модели, Vc—скорость судна в узлах, λΜ и Ас—коэф-ты трения модели и судна, зависящие от длин их. Значения λΜ и А? приведены (по Johow Hilfsbuch fur den Schiffb m, 5-e изд.) в таблице 1 и 2. Пересчет с результатов са-
Таб л. 1 .—3 начения коэф. т рения д судовых моделей из парафина длиной I в м,
| 1 | 1 | 1 | |||
| 0,25 | 0,23999 | 3,00 | 0,18564 | 5,75 | 0,16960 |
| 0,50 | 0,22800 | 3,25 | 0,18361 | 6,00 | 0,16872 |
| 0,75 | 0,21982 | 3,50 | 0,18139 | 6,25 | 0,16789 |
| 1,00 | 0,21,21 | 3,75 | 0,17990 | 6,50 | 0,16712 |
| 1,25 | 0,20783 | 4,00 | 0,17821 | 6,75 | 0,16642 |
| 1,50 | 0,20332 | 4,25 | 0,17664 | 7,00 | 0,16j75 |
| 1,75 | 0,19914 | 4,50 | 0,17521 | 7,25 | 0,16512 |
| 2,00 | 0,19601 | 4,75 | 0,17^91 | 7,50 | 0,16451 |
| 2,25 | 0,19297 | 5,00 | 0,17271 | 7,75 | 0,163; 8 |
| 2,50 | 0,19030 | 5,25 | 0,171э9 | 8,00 | 0,16344 |
| 2,75 | 0,18786 | о, $0 | 0,17057 | 8,25 | 0,16294 |
Таблица 2.—3 н а ч е н и я коэфициента трения λ0 судов, окрашены ы хм ас л яной краской, <5 необросшей подводной частью длиной L в метров.
| L | ^с | L | Я-с | L | V | L | h |
| 10 | 0,15906 | 60 | 0,14391 | 160 | 0,14020 | 260 | 0,13760 |
| , 15 | 0,15370 | 70 | 0,14342 | 170 | 0,13992 | 270 | 0,13737 |
| i 20 | 0,1507;» | 80 | 0,14300 | 180 | 0,13964 | 280 | 0,13715 |
| 1 25 | 0,14882 | 90 | 0,14261 | 190 | 0,18936 | 290 | 0,13693 |
| : 30 | 0,14741 | 100 | 0,14223 | 200 | 0,13910 | 300 | 0,13671 |
| , 35 | 0,14642 | 110 | 0,14187 | 210 | 0,1 884 | 310 | 0,13649 |
| 5 40 | 0,14567 | 120 | 0,141о0 | 220 | 0,138э7 | 320 | 0,13629 |
| ! 45 | 0,14508 | 130 | 0,14116 | 230 | 0,13831 | 330 | 0,13608 |
| ! 50 | 0,14461 | 140 | 0,14084 | 240 | 0,13807 | 3 40 | 0,13о86 |
| , 55 | 0,14422 | 150 | 0,14050 | 250 | 0,13783 | 350 | 0,13563 |
моходного испытания производится по закону подобия непосредственно с режима подобия, то есть в предположении, что вязкость не изменяет явления работы винта. Это предположение справедливо при достаточно большом числе Рейнольдса, то есть при достаточно высоких числах оборотов и достаточно больших диаметрах винта—модели.
При обычных условиях испытаний в С. о. б. отклонение по этой причине невелико и т. к. оно идет в запас, то есть преувеличивает потребную мощность, то обычно считают возможным им пренебрегать. Диаграммы самоходного испытания состоят из кривых вращающего -момента, упорного давления, числа оборотов и вычисляемой по ним затраченной мощности на валу винта WPS в зависимости от скорости модели. Путем пересчета определяются соответствующие величины для судна и строится аналогичная диаграмма. На ней же наносятся
EPS
величины пропульсивного кпд >/0=(EPS—
•буксиров, мощность из испытания модели).
К особым приспособлениям, применяемым вбассейне, относятся: 1) волнообразователь, представляющий собою длинный ящик, ось которого расположена поперек бассейна, приводимый в прямолинейно-возвратное движение в вертикальном направлении специальным электромотором через посредство шатунного механизма. Указанное движение дает возможность образовывать волны различной высоты и длины в зависимости от скорости и амплитуды движения волнообразователя. 2) Плавающее дно, состоящее из ряда пустотелых понтонов, по ширине равных лотку и скрепленных вместе. Внутри понтонов заключены трубы, в которые !
м. б. накачиваем воздух особым компрессором. Плавающее дно применяется для исследования движения судов на мелководьи. Впрочем невозможность осуществить ровное дно, громоздкость и неудобство в обращении не позволяют рекомендовать этот метод: устройство специального мелководного лотка следует признать более желательным. 3) Кавитационная
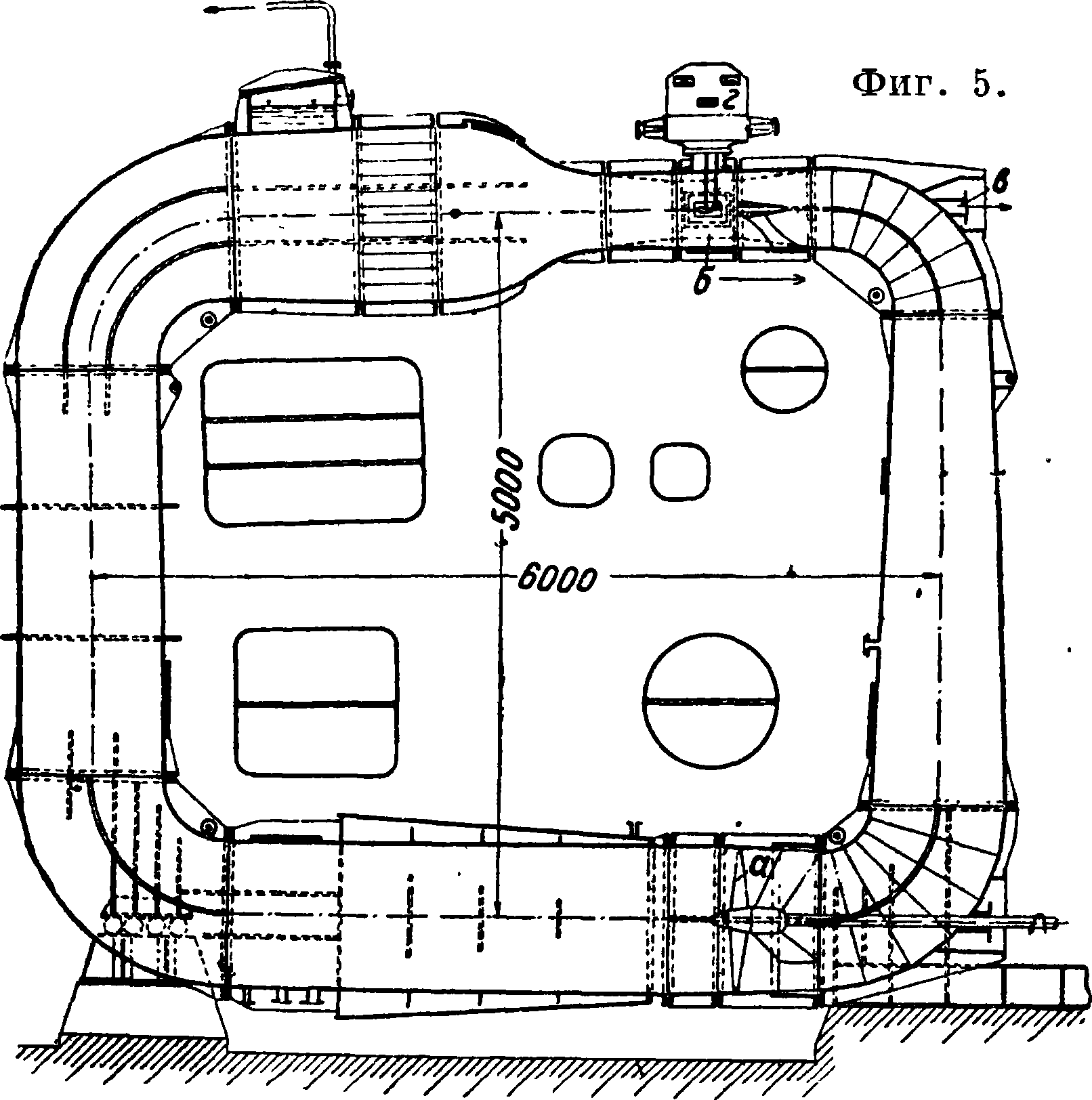
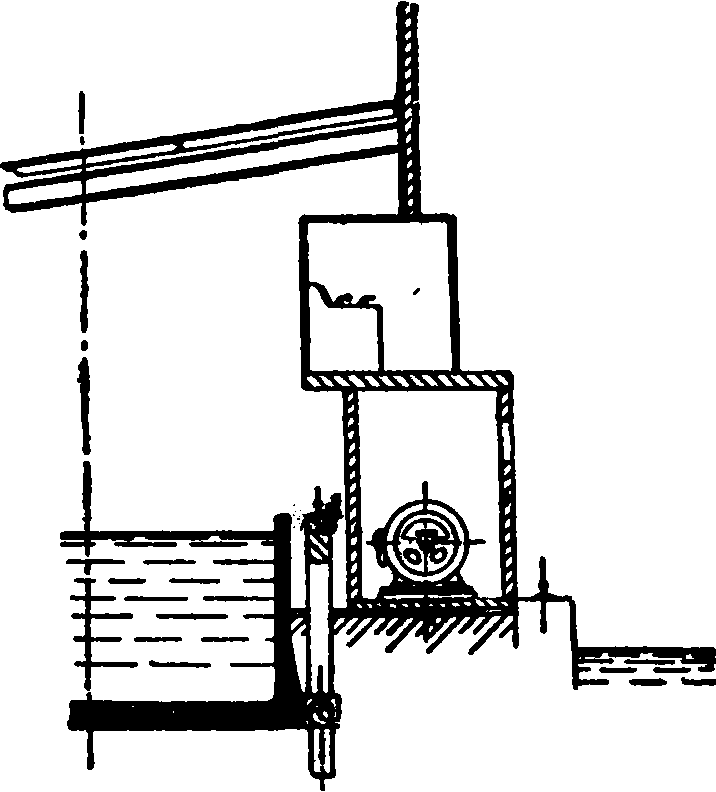
труба (фигура 5) устраивается для исследования винтов при режиме кавитации, т. к. это явление не поддается изучению в бассейне, ибо подобие натуры и модели не м. б. соблюдено по причине равенства атмосферного давления для натурного и модельного явлений, между тем как для наступления кавитации играет роль величина статич. давления, в к-рое атмосферное давление входит слагаемым. Поэтому в настоящее время предприняты попытки исследования явлений кавитации в специальной замкнутой трубе, давление в которой можно изменять по желанию в широких пределах. Винтовым насосом а, устанавливаемым в трубе, сообщается нек-рая скорость заключенной в ней воде. В трубу же у б помещается исследуемая модель винта, которой сообщается желаемое число оборотов валом, проходящим наружу через патрубок в; упорное давление и вращающий момент винта измеряются динамометром г. Явление можно наблюдать через стекло, вставленное в стенку трубы.
Модели судов изготовляются из парафина (редко из дерева)," причем существует два способа: в первом остов (скелфтон) парафиновой модели делается из дерева, во втором модель делается из парафина целиком. Второй способ более распространен. В этом случае парафин отливается начерно в глиняную форму; .для обработки отливка идет на специальный фрезерно-копировальный станок ? где она устанавливается килем вверх в корыте, движущемся вдоль своей оси, и обстрагивается 2 фрезами с вертикальными осями, получающими симметричное относительно диаметральной плоскости модели поперечное перемещение от руки, причем это перемещение управляется поперечным же пер»емещением рамки с стеклянной пластинкой, на которой нанесена окружность диаметра, равного наружному диаметру фреза. Под рамкой движется со скоростью обрабатываемой модели в продольном направлении стол с чертежом, на котором нанесен ряд ватерли-
ний модели. Мастер двигает рамку со стеклом (а следовательно и фрезы) в поперечном направлении так, чтобы окружность, нанесенная на стебле, была во время движения стола во внешнем касании к соответствующей ватерлинии; фрезы при этом прострагивают данную ватерлинию на обеих сторонах модели. Затем фрезы переставляются на высоту, соответствующую новой ватерлинии, производится вновь фрезеровка и т. д.; после этой обработки модель при
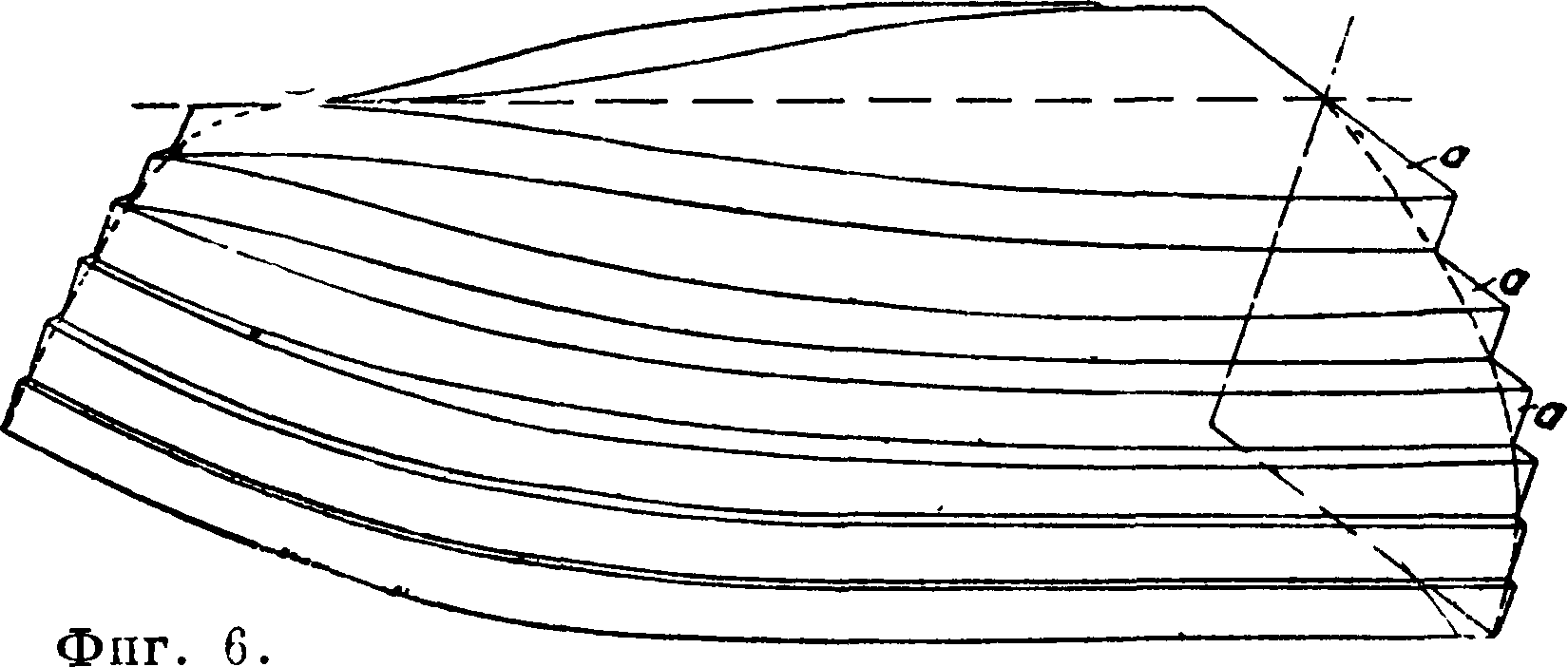
обретает ступенчатый вид (фигура 6), причем внутренние уступы ступени идут по ватерлиниям, излишки парафина аа снимаются затем вручную под лекала до исчезновения ступенек. Наконец модель идет на воду, где загружается балластом до потребной ватерлинии и выверяется диферент. Обработка моделей винтов производится аналогичным образом.‘Модель изготовляется из легкоплавкого металла, отливается в алебастровую (гипсовую) форму и обрабатывается на станке, аналогичном в принципе таковому для моделей судов. Разница заключается лишь в том, что продольное движение модели здесь заменяется вращательным движением винта, модели, вокруг своей оси. По этой причине скорость модели различна на различных радиусах, а отсюда меняется и масштаб чертежа (фрезплана)в направлении движе’-ния стола (вращения модели), по которому производится обработка, соответственно радиусу обрабатываемой части .винтовой поверхности. В соответствии с этим изображения профиля лопасти на фрезплане искажаются. Масштаб продольный (по оси х) неравен поперечному (по оси у), причем последний постоянен для различных радиусов, а первый (продольный) различен. Обработка заключается в простраги-вании канавок на лопастях по щилиндрич.сечениям (фигура 7),
Фигура 7.
то есть аналогична обработке в случае моделей судов (по ватерлиниям); в соответствии с этим фрезплан представляет собой совокупность сечений лопасти цилиндрич. поверхностями. Радиусы берутся через 5 или через 10 миллиметров. После строжки модель винта спиливается вручную до исчезновения следов канавок, а затем полируется. В здании бассейна располагаются помимо собственно бассейна столярная,
литейная (для парафина), модельная и механическая мастерские, бюро и кабинеты инженеров, аккумуляторная, светокопировальная и др.
Проектирование и постройка бассейна. Длину лотка следует определять, исходя из времени пробега (15—20 ск. постоянной скорости) и скорости; последняя зависит от скорости исследуемых судов и предполагаемого масштаба моделей. Обычные длины моделей— в пределах от 3 до 8 ж. В случае исследования гидросамолетов и глиссеров нукно иметь наибольшую скорость тележки не менее 20 м/ск. Надежность результатов, получаемых путем испытания в бассейне при пересчете их на натуру, не всегда является достаточной; известны резкие отклонения, получаемые в отдельных случаях при испытаниях судов от тех результатов, которые были получены путем пересчета данных испытаний модели. Тем не менее метод испытаний в бассейне следует все же признать значительно более точным для предварительного определения мощности механизмов судна, чем всякий другой. Что же касается подбора наивыгоднейшего варианта обводов, то есть сравнительной оценки различных образований корпуса судна, то испытания в бассейне являются
Таблица 3 .—Г лавные данные о важнейших С. о. б.
| Местонахож дение | Год постройки | Главные размеры бассейна, м | Скорость тележки,
м/ск | ||
| длина наи-
больш. |
шири на | глу бина воды | |||
| Гамбург “. »
» Берлин. Вена. Теддингтон. Рим. Гренелль. Вашингтон. Москва. Ленинград. |
1915 1915 1931 1910 -1916 1910 1 1930 1906 1899 1930 1887 | 185.0
165.0 322.0 202.0 180,0 175.0 275.0 160.0 П3,0 200,0 131,0 1 |
16,00
8,00. 5,00 8,20 10,00 9,15 12.5 10,00 13,25 12.5 6,70 1 |
6,75
4.50 2.50 4.30 5.00 3,73 6.30 4.00 4.50 6.50 3.30 |
9.00
5.00 20,00 7.00 8,50 7,60 12,0 6,10 10,2 13,j0 4.00 |
|
* Большая тележка обслуживает оба бассейна, полная эффективная длина 322 метров. | |||||
бесспорно единственным и очень точным методом. Самоходные испытания, вошедшие в употребление очень недавно, должны дать освещение вопросов «пересчета на натуру» и тем сделать более надежным результаты эксперимента В бассейне. Н. Алякринский.