 > Техника, страница 84 > Телемеханика
> Техника, страница 84 > Телемеханика
Телемеханика
Телемеханика, механич. воздействие па расстоянии, или «механика на расстоянии» (термин появился во Франции в самом начале 20 в). Согласно новейшим воззрениям слово «телеме-ханика»можетобъединять понятие техники связи механизмов на расстоянии вне зависимости от назначения этих механизмов и от средств связи, при помощи которых преодолевается расстояние. При этом конечной целью процесса телемеханизации в таком широком понимании этого термина является охват возможно большего участка управляемой системы с подчинением его единому руководству, получение возможности наблюдать и управлять с высоты командного мостика с ббльшим кругозором, чем это можно сделать, находясь возле самой машины. В дальнейшем Т. рассматривается в более обычной и установившейся интерпретации, именно как термин, с которым связываются понятия: управление на расстоянии, дальнее управление, дистанционное управление и т. д. Первоначально со словом Т. связывалось представление об управлении по радио подвижными военными объектами (катерами, минами, самолетами). Опыты в этом направлении действительно велись повсюду еще задолго до войны 1914— 1918 гг. Во время войны германцам удалось осуществить в 1917 году атаку береговых" укреплений порта Ньюпорт катерами, начиненными чатым веществом и управляемыми по радио с самолета, сопровождавшего их. Особого вреда противнику атака не причинила, но этим впервые в историю военного дела было введено новое телемеханич. е.
Для лучшей систематизации процессов, объединяемых термином Т., введем понятие «телемеханич. пары», определив его как комплекс элементов, скомбинированных и соединенных для осуществления функциональной связи на расстоянии между двумя частями одной механич. системы. В отличие от обычного понимания кинематич. пары, представляющей непосредственное соединение двух воздействующих друг на друга элементов (например две шестерни, винт и гайка, шкив и ремень), телемеханич. пара есть сложная система, передающая воздействие от элемента к элементу через ряд последовательных промежуточных звеньев, одним из которых м. б. например электромагнитные волны. При небольших расстояниях связь м. б. осуществлена чисто механич. методами (например гид-равлич. передача движения поршней, тросовая, канатная или ременная связь двух шкивов). Эти последние связи передаюти усилие и движе-
ния,они почти всегда обратимы. Поворот одного шкива (например связанного ремнем с другим шкивом) вызовет такой же одновременный и идентичный (синхронный и синфазный) поворот последнего, и обратно. При увеличении расстояния быстро растут вредные потери на пути, и кпд соединения падает.
Синхронные передачи. Внедрение электроэнергии сильно упростило соединение частей механизмов на расстоянии. Появилось много электрич. передач, осуществляющих соединение двух или нескольких поворачивающихся деталей почти так же, как соединение их общим валом или ремнем. Эти передачи
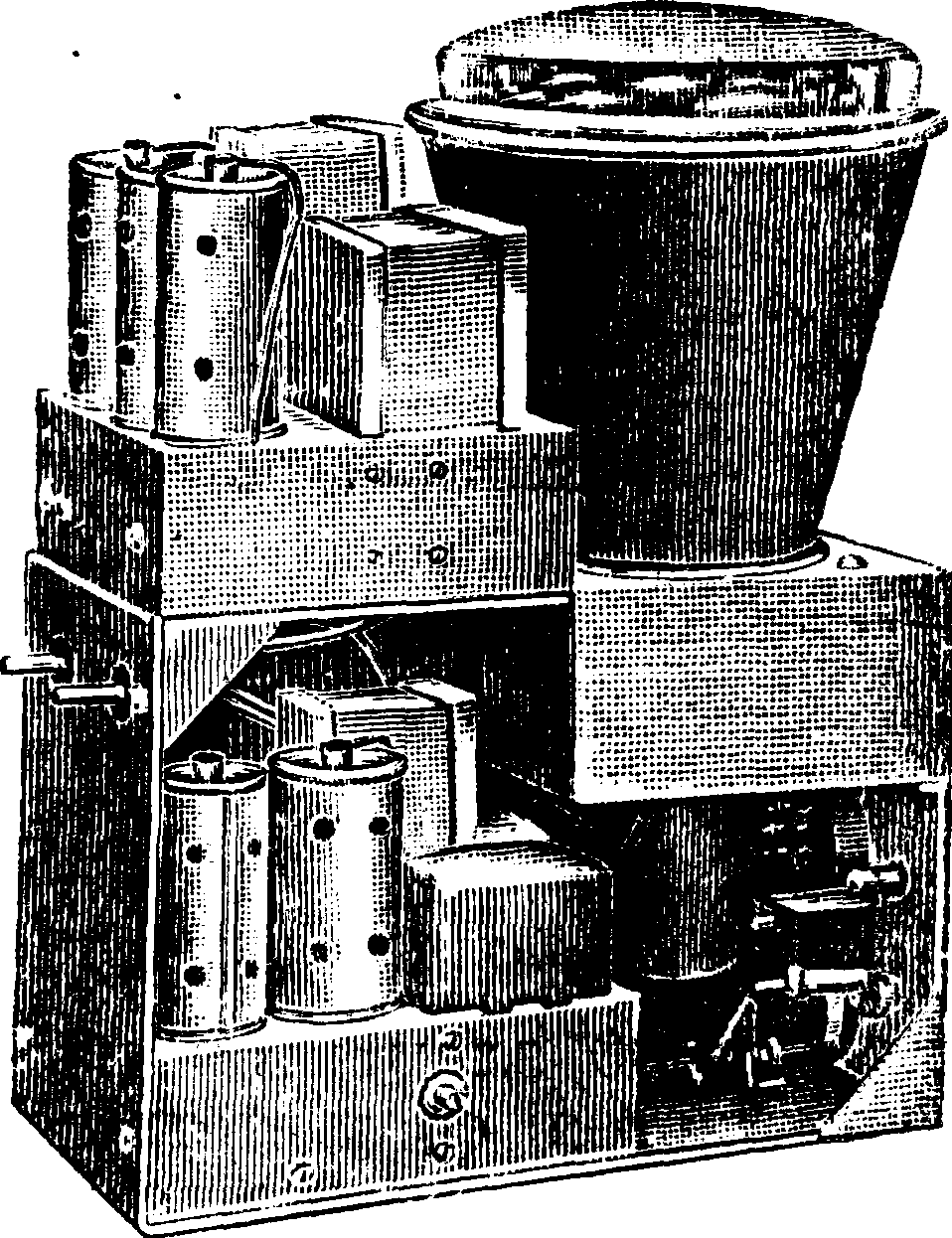
Фигура 1.
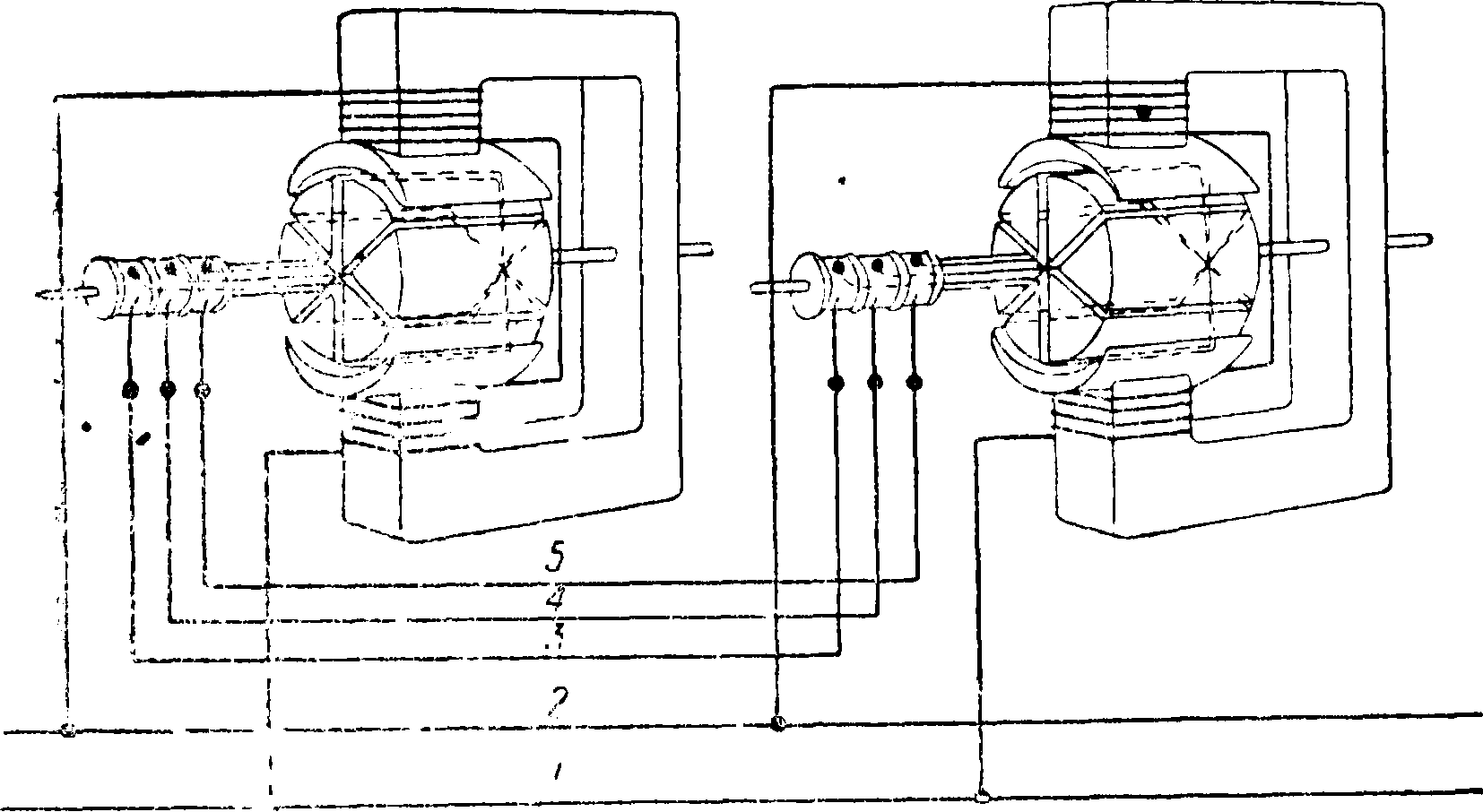
принято называть синхронными. Основным представителем синхронной передачи является сист. Симецса на переменном токе, получившая широкое распространение и повторяемая до сих пор многими изобретателями и фирмами в разных вариантах и под разными названиями. Основная идея этой системы была предложена еще в 1875 г. и запатентована фирмой Сименса в 1884 г. Электродвигатель системы Сименса состоит из двухполюсного статора с обмоткой, питаемой однофазным переменным током, и из ротора, состоящего из многофазной обмотки (обычно трехфазной), присоединенной к нескольким кольцам (фигура 1). Если питать обмотки ста
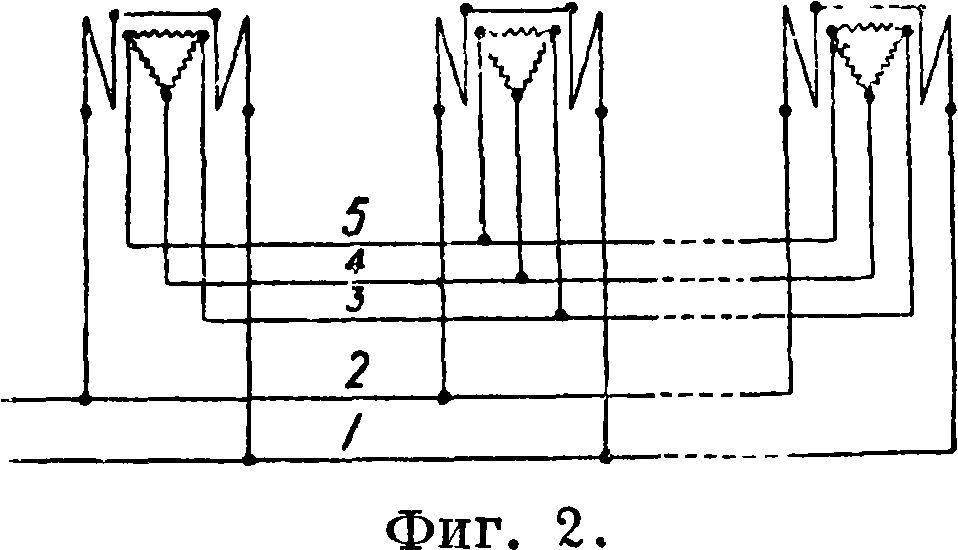
торов (фигура 2) нескольких таких двигателей от общего источника переменного тока (провода 1 и 2) и соединить обмотки всех роторов параллельно друг другу в общую цепь 3,4,5, то получим систему телемеханич. связи, ведущей себя почти так же, как механич. соединение: всякое движение одного из роторов влечет за собой синхронное движение всех остальных. Понять сущность их действия можно, рассмотрев простейший случай соединения двух таких двигателей (фигура 1). Если оба ротора занимают по отношению к статору одинаковые положения, то переменные напряжения, индуктйрованные на зажимах трехфазных катушек, одинаковы. Эти напряжения действуют навстречу друг другу в общей цепи (синхронизации) и следовательно в якорях электродвигателей не проходит тока, а система находится в устойчивом равновесии. Если один из роторов сместится, то эдс в его катушках изменится и тотчас же в его обмотках возникнут токи, которые согласно закону Лен--ца будут стремиться восстановить равновесие, то есть синхронизм; благодаря этому все роторы •получат то же смещение, что и первый ротор. Несмотря на простоту и довольно хороший кпд такой передачи эта система обладает рядом следующих недостатков, ограничивающих область ее применения. 1) Общая «возбуждаю
щая» цепь переменного тока поглощает непрерывно нек-рое количество энергии даже при остановках двигателей. 2)’ В момент полного согласования (синхронизма), как гыше сказано, в цепи роторов (являющейся синхронизирующей цепью) отсутствует ток, а вместе с тем отсутствует синхронизирующее усилие, появляющееся лишь при значительных смещениях. Благодаря этому малейшая нагрузка на ротор (например трение в подшипниках) вызывает неточное согласование. Эта неточность лишает систему всех выгод плавного непрерывного поворота и практически дает сравнительно немного точных «гарантированных» передаваемых положений. фИГ. з.
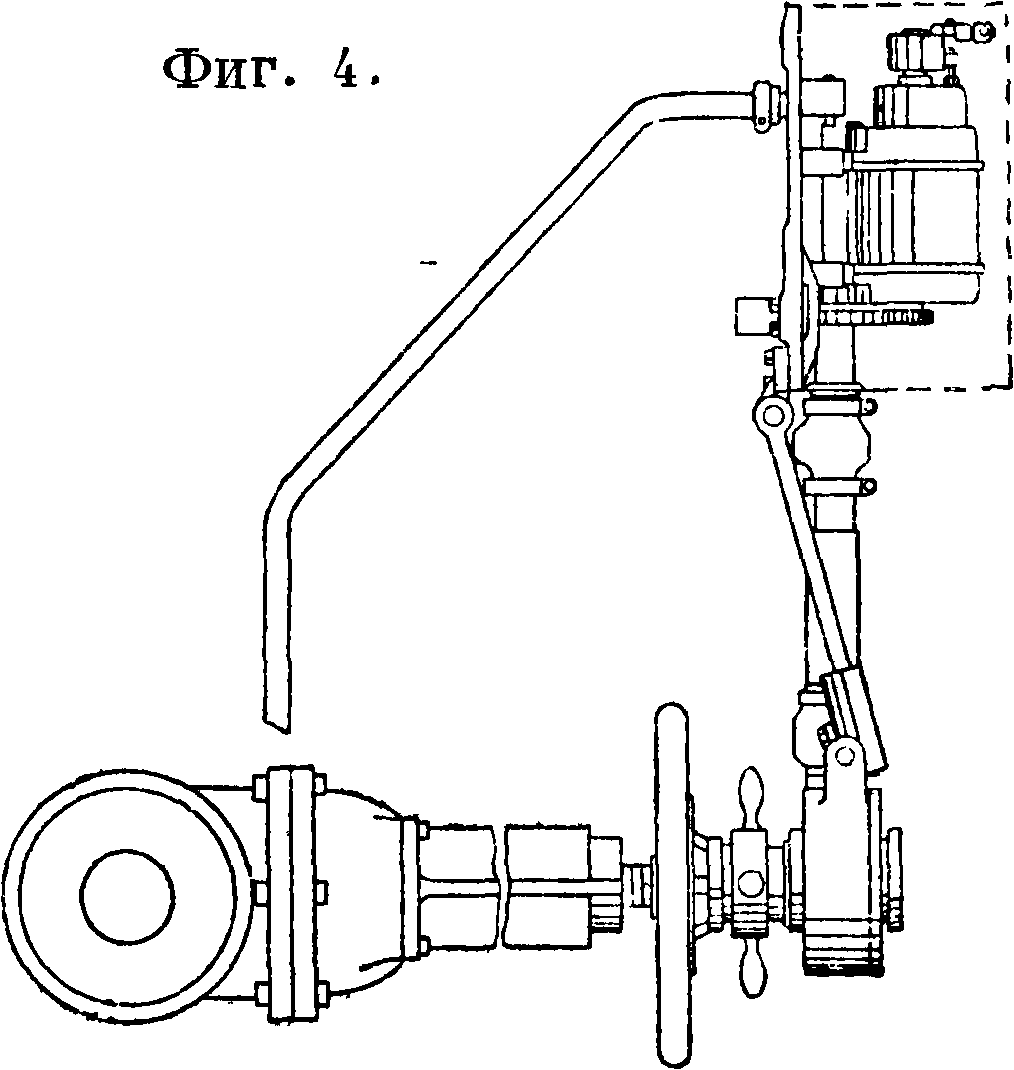
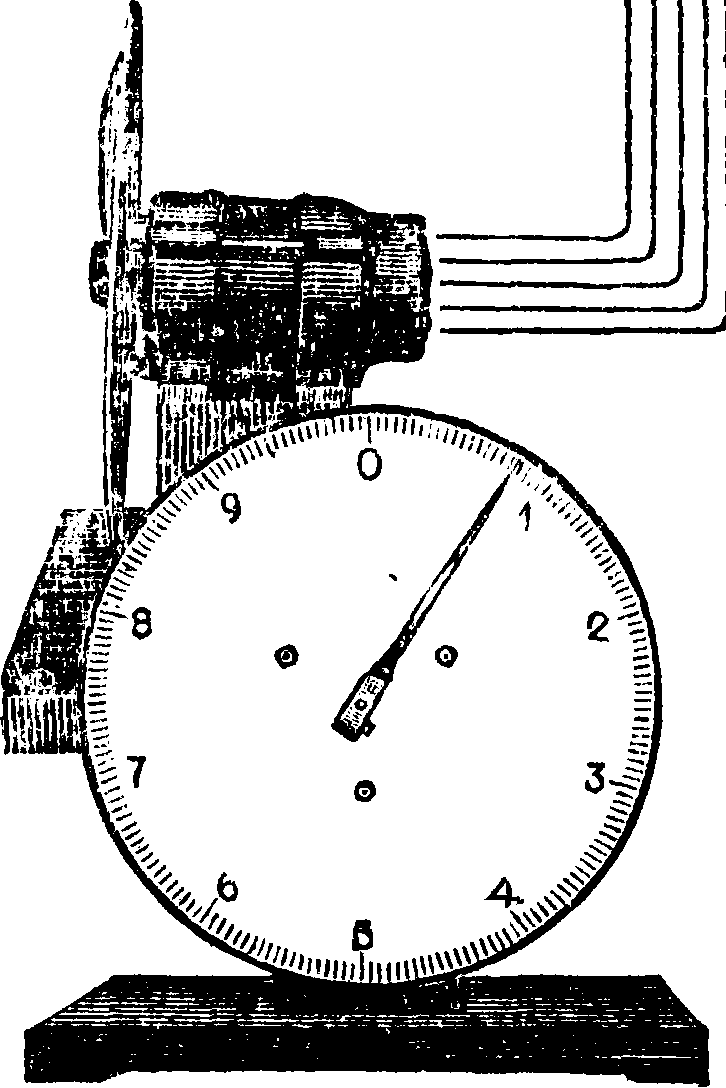
3) Система требует большого числа проводов, несущих довольно^болыние токи. Это ограничивает применение системы для сравнительно небольших мощностей ирасстояний. На принципе моторов Сименса разработано теперь много систем, называемых «Seizin» (са-мосинхронизиру-ющиеея).На фигуреЗ показано применение таких электродвигателей для передачисигналов на стрелку, показывающую уровень воды. На фигуре 4 изображено управление шибером, закрывающим трубу. Такое устройство дает возможность сосредоточить управление мно-Λ—. гими шибера-.|Ll ми, разбросанными по заводу (маслоочистительные, перегонные), в одном месте.
Ступенчатые передач и. В большинстве случаев непрерывное движение соединенных между собой частей необязательно. Можно ограничиться тем или иным количеством фиксированных положений, которые может занять подчиненный (управляемый) элемент по отношению к задающему (управляющему).
Напр. если можно какому-либо элементу, удаленному от места управления (от пульта), придать по выбору 5 000 или 10 000 положений, то это почти все, чего может потребовать практика. В большинстве таких ступенчатых передач использован так или иначе принцип последовательного (ступень за ступенью) хода некоторого подвижного элемента, приводимого в движение электромагнитом через храповик. Ступенчатые системы синхронных передач требуют только двух-трех проводов для пропуска импульсов, но обладают по сравнению с системой типа Сименса значительно меньшим кпд. По самой своей природе кпд в них не м. б. больше 50%, так как вся энергия магнитного поля катушки или системы катушек при переключении задающего коммутатора на следующую ступень (следующий импульс) бесполезно тратится в искре при разрыве тока. Сколько-нибудь значительных мощностей передать нельзя, т. к. при этом искра на коммутаторе (ключе) становится слишком разрушительной. Большим недостатком этих систем является необходимость их согласования в начале работы, т. к. дальнейшее движение происходит последовательными скачками. Для получения мощных поворотов прибегают ко всякого рода ме-ханич. и электрич. усилителям и «следящим системам». Последние составляют особенно распространенный вид усиливающих систем. Идея следящих систем заключается в том, что слабая задающая система ведет лишь небольшой контакт (щетку) по “коммутационному (следящему) кругу. При равновесном положении щетка находится на изоляции между контактными пластинами на кругу·. При смещении щетки от среднего положения замыкается та или иная (в зависимости от стороны смещения) цепь местного двигателя, к-рый поворачивает следящий круг (а с ним и всю систему) вслед за щеткой до тех пор, пока изоляция снова не попадет под нее, вследствие чего цепь двигателя прервется. Имеется большое количество модификаций таких систем, но все они основаны на том же принципе.
Селекция. Системы связи двух удаленных элементов при увеличении длины линии связи приходится делать менее мощными и передавать через них лишь слабые воздействия на приборы, питаемые от местных источников энергии. На практике в большинстве случаев можно обойтись передачей лишь весьма немногих движений или положений от задающего элемента к объекту управления. Если объект соответствующим образом подготовлен и управление им упрощено путем передачи части функций управления местным автоматич. приспособлениям, то достаточно для осуществления связи передать небольшое количество положений и, выбрав одно из них, направить в нужное русло энергию местных источников. Этот отбор из общего числа одного определенного русла (положения) и направления в него энергии принято называть «селекцией», а приборы, производящие отбор,—«селекторами». При значительных расстояниях приходится отказываться не только от совместной передачи движений и усилий, но и само движение упрощать и трансформировать в движение специальных приборов (синхронных двигателей, селекторов), воздействуя на объект путем превращения перемещения частей этих приборов в движение подчиненного (ведомого) элемента. При передаче происходит как бы отделение кинематич. функций от динамич. Селекция следовательно в ее широком смысле (включая и все синхронные передачи) представляет собой ту часть теле-механич. пары, которая осуществляет кинематич. связь между объединяемыми элементами. Динамич. же сторона таковой проявляется в пропуске энергии в избранное русло, то есть в посылке исполнительного распоряжения, включающего в нужный момент местный источник энергии.
Ординарные телемеханические системы. Простейшим случаем телемеханич. пары является такая система, в которой задающий элемент находится по одну сторону линии (станция отправления), а объект управления включен по другую сторону линии. Такая система м. б. названа «ординарной телемеханической системой». В ней имеются три основные части: 1) отправительный пункт (передающая станция), 2) линия связи, или канал связи, 3) приемный пункт. Передающая станция (станция управления) является местом отправления в линию связи импульсов (команд, факторов воздействия), которые, попав в приемную аппаратуру, производят те или иные действия (сигналы,движения ит.п.). Число отдельных команд (или положений) м. б. велико, но все они предназначены для приемного прибора, включенного в линию в одном пункте. Ординарная система м. б. подразделена на ряд болео мелких элементов, каждый из которых объединяет ряд приборов и деталей, предназначенных для выполнения определенной функции п общем процессе воздействия задающей системы на управляемую. На фигуре 5 схематически представлена в развернутом виде ординарная система, разделенная на следующие элементы:
I—задающий элемент, II—комбинирующий элемент, III—отправительный аппарат управления, IV—линейный передатчик, V—линия связи, VI—линейный приемник, VII—принимающий аппарат управления, VIII—автомати-зационная аппаратура, IX—исполнительная аппаратура, X—объект управления.
Задающий элемент дает начало процессу воздействия на объект управления череа комплекс слагающих, входящих в телемеханич. систему. Действие самого задающего элемента вызывается изменением нек-рых первичных факторов, являющихся характерными для различных видов задающих элементов. Этим элементом м. б. какая-либо часть машины, с которой необходимо связать на расстоянии часть другой управляемой машины; это м. б. автомат, производящий по заранее заданной программе ряд действий, подлежащих передаче на объект управления; это м. б. чувствительный элемент (прибор, вызывающий действие системы в результате изменений внешних физич. факторов, например фотоэлемент, микрофон). Наконец задающим элементом м. б. человек. В этом случае первичным фактором является результат разумного учета окружающей обстановки. В одной системе м. б. один или несколько задающих элементов любого вида, действующих одновременно или последовательно в зависимости or необходимости и возможностей избранной системы. Отсутствие задающего элемента превращает систему в бездействующую.
Комбинирующий элемент//является местом воздействия задающего элемента на телемеханич. аппаратуру. Воспринятые им действия превращаются в необходимые комбинации движений или переключений в аппарате“ управления. Если задающим элементом являет-
ся человек, то элемент II обычно называют пультом управления, клавиатурой и т. д. С пультом часто связывают устройство, регистрирующее отправляемые команды и называемое «регистрирующая схема», «табло», «световая схема» и т. д. Помимо функций регистрации обычно с табло связывают сигнальные устройства (лампы, бленкеры), извещающие о принятии и выполнении команды. В этом случае в табло соединены вместе и элементы регистрации и элементы исполнения отдельной встречной системы дальнего наблюдения.
Отправительный аппарат упра-в л е н и я Ш (фигура 5) предназначен для при-

Фигура 5.
нятия факторов“ воздействия от элемента II и превращения их в ряд импульсов электрич. токов или механич. движений, так скомбинированных, чтобы разделить передаваемые команды одна от другой. Передающий аппарат управления почти всегда предусматривает возможность передачи большего числа команд,чем имеется в наличии отдельных линий связи.
Линейный передатчик IV предназначен для превращения сигналов, идущих от аппарата управления, в вид, необходимый для передачи по данной линии связи. Если линия например беспроводная (радиолиния), то этот элемент назовется радиопередатчиком (смотрите). Если это световая линия, то передатчиком служит прожектор (смотрите). Этот элемент может отсутствовать, если посылаемые аппаратом управления команды по своей природе соответствуют линии связи. Так часто бывает на проводных линиях.
Линия связи V (канал связи) есть та среда, по которой передаются факторы воздействия. Такой средой м. б. воздух (акустич. или пневматич. линия), вода (гидравлич. и, гидроакустич), «эфир» (радио, световые лучи) или какой-либо другой агент физич. или химич. порядка, могущий служить для этой цели. Линии связи м. б. подразделены на: 1) проводные (в том числе многопроводные, то есть кабели) и беспроводные, 2) длинные и короткие, 3) однократные или многократные (подобны многожильному кабелю). Если число каналов равно или больше числа команд, то система может сильно упроститься (можно уничтожить аппарат управления, т. к. его функции будет выполнять комбинирующий элемент).
Линейныйприемник F/предназначеп для принятия с линии факторов воздействия и превращения их в вид, соответствующий дальнейшей аппаратуре. При радиолинии например это будет радиоприемник с реле, в проводной—приемное линейное реле, в лучевой—фотоэлемент.
Принимающий аппарат управления VII—прибор, превращающий принимаемые комбинации факторов воздействия, идущие от передающего аппарата управления, в движение нек-рых своих органов, вполне соответствующее движению или состоянию органов комбинирующего элемента (пульта). В соответствии с формой сигналов, идущих с передающей станции, приемный аппарат управления разделяет команды по местным линиям и направляет в них поток местных источников энергии так, чтобы осуществить необходимые движения органов объекта управлейия. Обычно этот прибор называют «селектором», «распределителем», или же «репитером» (повторителем).
Автоматизационная аппаратура. VIII служитсвязующим звеном между приемным аппаратом управления и управляемым объектом. Эта часть системы включает в себя все приборы, приводящие объект в положение или состояние, соответствующее положению приемного аппарата управления. Это же последнее соответствует командам, идущим от задающего элемента. Т. о. автоматизационная аппаратура, восприняв кинематич. часть всего процесса воздействия задающего органа на объект, вводит в дело местную энергию и осуществляет силовую (динамич.) часть этого процесса. В большинстве случаев автоматизационная аппаратура предназначена для упрощения управления объектом. Для этого целый ряд функций объекта связывается между собой рядом автоматически координирующих блокирующих приспособлений, дополняется необходимыми усиливающими приборами (усилители поступательных движений, поворота, следящие системы и т. д.> и ставится под контроль местных автоматов, чувствительных элементов, стабилизаторов, регуляторов и предохранителей. Эта роль авто-матизационной аппаратуры сохраняется независимо от того, входит ли данная аппаратура с обслуживаемым ей объектом в телемеханическую систему или совершенно автономна. В* телемеханической системе она предназначена, для координирования принятых факторов воз
действия с местными данными (не могущими быть учтенными на станции отправления), внесения в эти местные данные изменений, соответствующих принятому, и передачи факторов воздействия исполнительной аппаратуре.
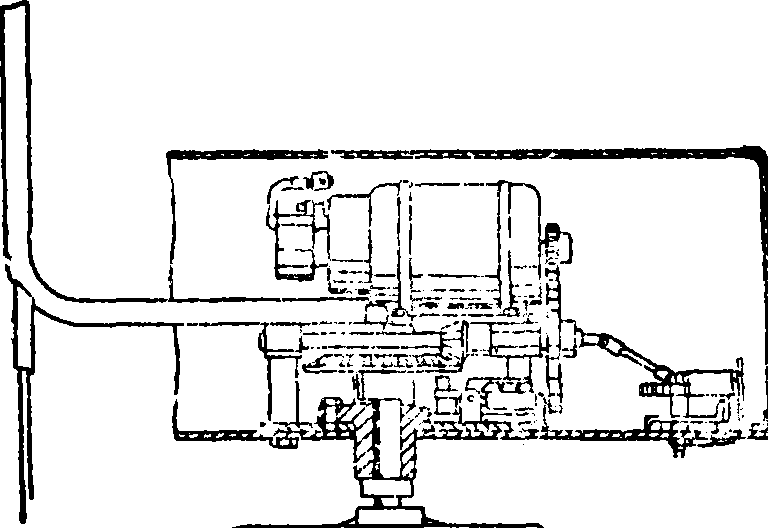
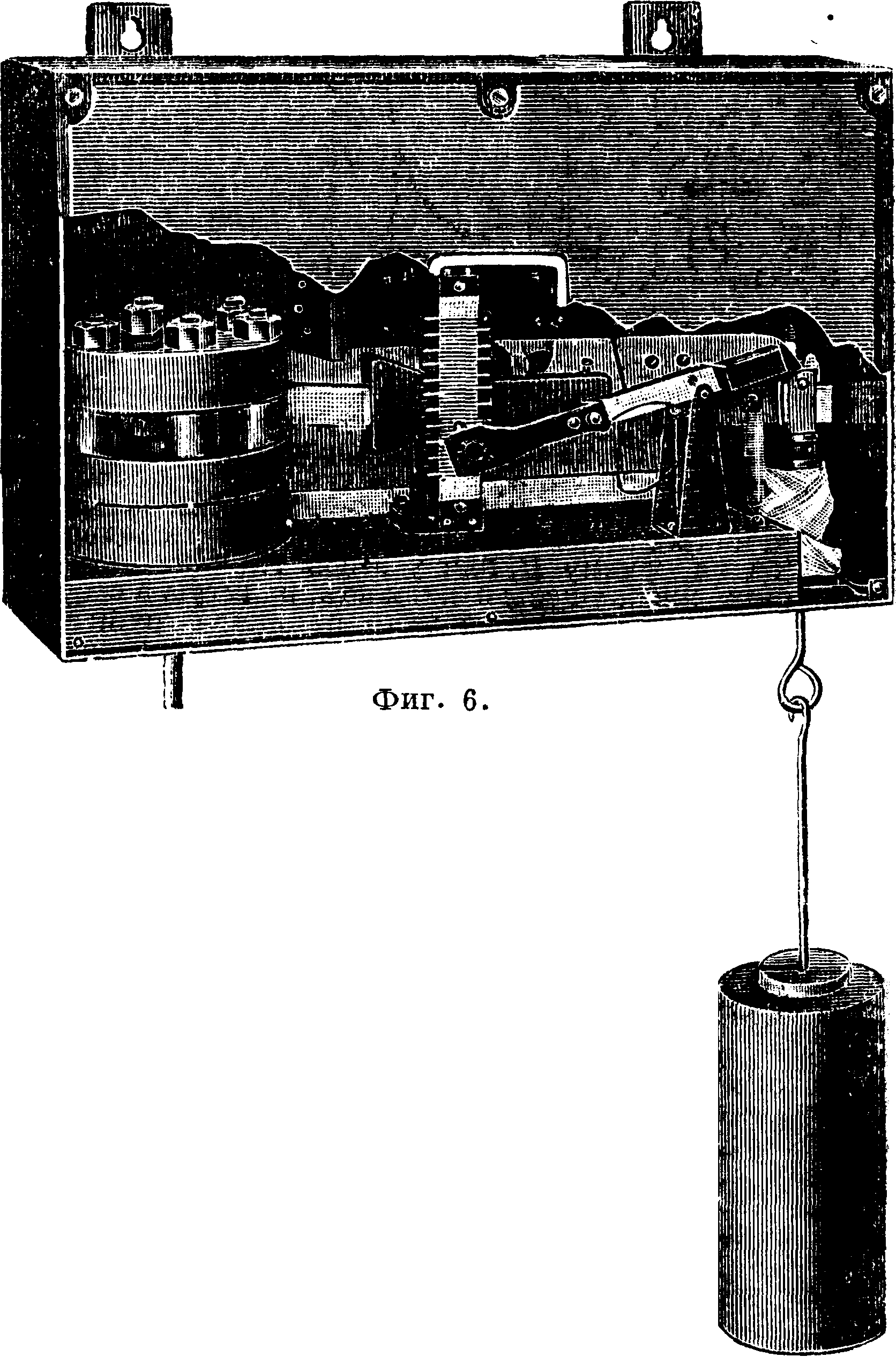
Для пояснения приведем пример схемы автоматизации парового котла. Если бы все элементы работы котла были механизированы (без этого вообще нельзя теле-механизировать), но не связаны автома-тизационной схемой,то управление с расстояния такой установкой представляло бы ряд непреодолимых затруднений. Потребовалось бы следить за уровнем воды, давлением пара, тягой, подачей топлива и т. д. Однако все эти элементы действия котла можно соединить и поставить под контроль одного главного фактора, например давления пара в главном паропроводе. Фирма Leeds^ & Northrup (Америка) разрешила эту задачу следующим образом. С главным паропроводом при помощи трубки соединен особый чувствительный элемент (фигура 6)^ к-рый в завиримости от давления в его камере (в левом углу коробки) и груза, подвешенного к коромыслу (справа на крючке),переводит движение реостата (в центра коробки) в положение, соответствующее равновесному положению коромысла,и этим устанавливает ток в некоторой контрольной электрич. цепи. Изменение давления пара будет менять ток во всей цепи. Эта контрольная_цепьлпро
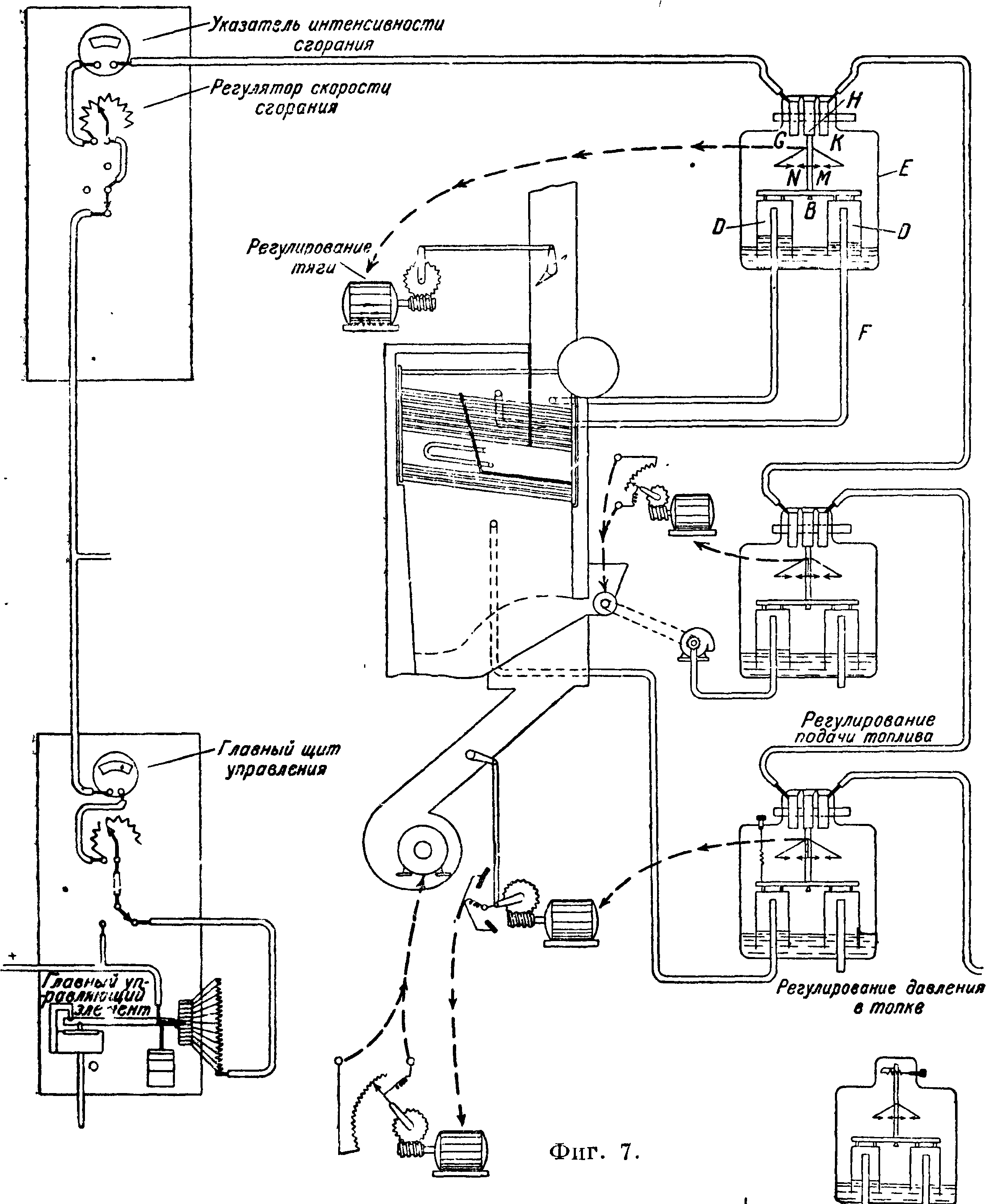
ходит (фттг. 7) по всем котлам через общий ре-остат на главном пульте и через реостат данного котла. В цепь у каждого котла включены последовательно особые балансные реле, регулировка которых меняется в зависимости от тока, проходящего по обмотке. Коромысло с подвешенными к нему полыми цилиндрами D в виде колоколов опирается на призму В, как у весов. Нижние открытые края цилиндров опущены в жидкость, налитую в сосуд Е. Воздушное пространство каждого цилиндра трубками F соединяется с теми местами, давление в которых мы желаем сравнить между собой. Предположим это будут 2 точки внутри котла и в вытяжной трубе. Если давления не равны (например при наличии тяги в трубе), то баланс нарушится, коромысло наклонится в ту или иную сторону и замкнет правый или левый контакт из связанной с ним контактной системы N или М. Замыкание контакта вызовет движение в ту или другую сторону мотора, управляющего заслонкой в дымовой трубе. Изменение положения заслонки изменит тягу, а последняя изменит разность давлений двух точек котла, с к-рыми связаны полости цилиндров реле. Движение мотора, управляющего заслонкой, будет продолжаться до тех пор, пока не восстановится равновесное положение коромысла реле и не разомкнутся контакты. Т. о. органы, управляющие тягой котла, как бы следят за положением коромысла и приводят его в равновесие. Для того чтобы иметь возможность управлять с расстояния тягой котла, в указанном реле предусмотрена катуш-
_d ка Я, укрепленная на
® 3ΡΪ том же коромысле. Ка тушка Я расположена между двумя катушками G и К, укрепленными на корпусе. Если включить все катушки последовательно, как указано на фигуре 8, и подобрать правильно полярность, то, пропустив через них ток, мы можем создать электродинамическое давление на среднюю катушку, которое будет отклонять ее вместе с коромыслом. Созданное таким давлением отклонение должно будет компенсироваться разностью давлений в полостях цилиндров, а разность давлений установится лишь при определенной
$
Фиг. тяге в τρν6β. Изменяя ток в катушках, мы можем управлять тягой открытием заслонки трубы. Совершенно так же регулируются подача топлива (реле на фигуре 7, ниже первого) и подача воздуха. Эти подачи ставятся в зависимость от давления в топке по сравнению с атмосферным (правая трубка соединена с атмосферой).
Если давление желают держать постоянным, вне зависимости от нагрузки котла, то ставят реле без дистанционного дальнего управления (схематически изображено в правом нижнем углу фигура 7). Здесь постоянное преобладание создается регулируемой от руки пружиной. Все реле, управляющие тягой, топливом и подачей воздуха, включены последовательно в общую контрольную цепь данного котла. Поэтому, меняя силу тока в этой цепи, можно одним движением реостата изменить все элементы работы котла, заставляя его более или менее интенсивно отдавать пар в общий паропровод. Давление же в последнем контролируется общим чувствительным элементом. Изменив положение реостата на индивидуальной панели, можно нагрузить или разгрузить дшный котел. Из приведенного ^примера видно, как просто становится управление всей системой при хорошо продуманной автоматизации.
Исполнительная аппаратура IX (фигура 5) предназначена для непосредствен- ного воздействия на объект управления. Такими аппарата-. ми бывают электродвигатели (сервомоторы), электромагниты, гидравлич., пневматич., вакуумные и другие двигатели и т. д.
Объект управления×есть главный элемент всей системы, т. к. без HerQ вся система теряет смысл. Если проследить работу всех промежуточных ззеньев в общем процессе передачи воздействия от задающего элемента на объект, то можно выделить три характерных момента. Во-первых, движение задающего элемента I трансформируется в аппаратуре управления в нек-рое действие ее, дающее возможность передать это движение по линии связи. В этом процессе трансформации движения (зашифрование его на передающей стороне и расшифрование на приемной) принимают участие элементы II,IllnVII, объединяемые общим названием селекторной аппаратуры, или аппаратуры управления. Вторым, не менее важным процессом является перенесение этих трансформированных воздействий через пространство, разделяющее взаимодействующие элементы. Перенесение осуществляется при помощи элементов IV, V и VI, объединяемых под названием линейной аппаратуры. Третьим и последним моментом является превращение трансформированных движений селекторной аппаратуры в фактич. выполнение объектом переданных команд. Эти функции выполняет аппаратура элементов VIII и IX, возвращающая всему процессу воздействия его настоящий полный вид, в к-ром кинематич. и динамич. сущности воз действия на объект×снова соединяются воедино. В указанных выше процессах участвуют питающие аппаратуру источники энергии, не показанные на фигуре 5 (аккумуляторы, первичные элементы или та или иная энергетич. система, подводящая по своим каналам энергию к месту использования).
Селекторная аппаратура. В виду особо Характерной для телемеханич. связи роли аппаратуры управления (селекции) остановимся подробнее на принципах ее работы. Действие селекторной аппаратура разделяется на две ясно выраженные операции: 1) передача на приемный пункт «выбора положения» и «выбора линии» (операция разделения, избрания, или селекции) и 2) передача на избранную линию «команды исполнения», то есть команды, направляющей энергию местных источников в избранный канал (линию) и приводящей в действие местный аппарат, устанавливающий в нужное (избранное) положение объект управления (операция выполнения). В некоторых случаях эти две операции неразделимы, например в синхронных системах, служащих для «непрерывной» передачи угловых величин, при помощи которых связывают иногда какие-либо установки с визирной трубой наблюдателя. Здесь нет посылки специального исполнительного сигнала. Объект сам непрерывно следит за каждым изменением положения, переданным через селекторную аппаратуру. В других случаях исполнительная команда совершенно отделена от операции избрания линии. В управляемой например по радио лодке сист. Шово (Франция) управление производится путем предварительной посылки нескольких коротких радиосигналов (точек). В зависимости от числа их избирается определенное распоряжение (например «полный ход вперед»). После этого дается одна точка, приводящая в действие местный исполнительный прибор (например открытие дроссельного клапана двигателя). Посылка второй точки снимает действие команды (например ставит на «малый ход»). Чтобы дать отбой всей команде и перейти на другую, дается тире (длинная посылка); система этим приводится в исходное положение и готова принять новый сигнал. В нек-рых установках для посычки исполнения применена отдельная линия связи (провод или вторая радиоволна).
Для выполнения операции выбора положения (операция разделения) применяют весьма различные методы. Главнейшие из них еле-, дующие: 1) Если число фиксированных положений, необходимых для управления данным объектом, равно числу каналов связи (например числу отдельных радиоволн или отдельных жил в кабеле, не считая одного общего возвратного провода), то выбор линии осуществляется соответствующей установкой пультового коммутатора и посылкой в нужную линию исполнительного распоряжения. 2) Многоволновую или многопроводную селекцию можно заменить передачей по одной линии связи (одна несущая волна, одна пара проводов) сигналов различной частоты. Метод такой «многократной» связи, весьма развитый в телефонии, телеграфии, технике телеизмерений, нередко называют «частотной селекцией». Частотная селекция делится на несколько характерных групп, а) Подтональная группа (частоты О-НОО Hz). При частотах 04-50 Hz (импульсно-частотный метод) приемным прибором может служить чувствительный электроизмерительный прибор, перио дически подключаемый приемным реле (вибрирующим соответственно передаваемой частоте) к батарее через конденсатор (схема Сименса). Количество протекающего через прибор электричества в единицу времени будет пропорционально количеству разрядов конденсатора, то есть числу приходящих импульсов. При частотах 154-100 Hz применяют резонансные реле с тонкой пластинкой или целые приборы типа частотомеров. При хорошей регулировке резонансных реле можно получить разделение сигналов через 1—172 периода, б) Тональная группа (1004Ю 000 Hz). При частотах 1004-1 000 Hz на приеме и передаче применяются резонансные реле типа камертонов. В этой части спектра частот приходится принимать серьезные меры против влияния t° на механич. свойства вибраторов и либо помещать камертоны в термостаты либо изготовлять их из особых материалов. При частотах 1-уЮ kHz применение механич. методов резонанса затруднительно и приходится переходить к электрофильтрам (смотрите Многократное телеграфирование и телефонирование).в) Ультразвуковая группа (104-50kHz). Передача и прием производятся исключительно с помощью генераторов, подобных радиопередатчикам и радиоприемникам. При гидроакустик. линии связи (сист. Ланжевена) излучателем и приемником служит-кварцевое зеркало, включенное в колебательный контур,
г) Высокочастотная группа (от 50 kHz и выше). Эти частоты применимы лишь при радиопередаче и являются по существу многоволновой (многоканаловой) линией связи. 3) При управлении на расстоянии по проводной линии (принципиально возможно и на других линиях) нередко пользуются методом посылки сигналов различной интенсивности (сила тбка, напряжение). Если число передаваемых положений не очень велико (например 2—3), то на приемном пункте пользуются включением ряда реле различной чувствительности. Примером передачи с различными интенсивностями является система кольцевой трубки Сименса. Передатчик Сименса состоит из стеклянной трубки, согнутой в виде кольца, наполовину наполненной ртутью, внутри которой находится проволока большого омич, сопротивления. Концы проволоки выведены через стекло и подключены через батарей к линии связи. При повороте кольца ртуть заливает больший или меньший отрезок проволоки и тем изменяет общее сопротивление всей системы. На приемном конце включается обычный прибор типа миллиамперметра, положение которого будет соответствовать положению удаленного кольцевого передатчика. Если слабые движения приемного прибора необходимо передать на местную мощную систему, применяют т. н. падающую дугу. Это устройство состоит из дуги, помещенной над стрелкой измерительного прибора. Под стрелкой на шкале расположен ряд контактных пластинок (ламелей). К стрелке подведен один из полюсов местной батареи, а ламели подсоединены к отдельным местным линиям. При помощи особого приспособления время от времени(например раз в 2—3 ск.) дуга опускается (падает) на стрелку, прижимает ее к находящейся под ней в данный момент ламели и дает этим ток в нужную линию. Если не требуется «постоянное» совмещение системы со стрелкой, то падение дуги м. б. производимо особым котрольным сигналом. Общим недостатком метода интенсивности является большая зависимость его от на пряжения линейной батареи и состояния (утечка и сопротивление) линии связи. Для ослабления этих влияний применяются различные способы включения, как например мостик Витсто-на, метод компенсации и др.В последнем на передатчике применены приборы, устанавливающие силу тока в линии, всегда однозначно соответствующую передаваемому положению независимо от напряжения батареи и сопротивления линии. Утечка линии однако и здесь является причиной ошибок. 4) В проводных системах часто применяется также метод полярности. В этом случае на приемном пункте ставятся поляризованные реле или реле, включенные через выпрямители. Комбинируя с методом интенсивности и варьируя число проводов, можно получить этим способом большое количество положений. Приведем пример двигателей Сименс и Гальске, состоящих из трехфазного статора и поляризованного двухполюсного ротора (фигура 8). Путем комбинаций включений в линии различных полюсов можно получить 12 фиксированных положений ротора, сдвинутых на 30°. Особым преимуществом этой системы является «абсолютность»положений, то есть отсутствие необходимости предварительной син-•хронизации передатчика и приемника. Приемный мотор м. б. включен в любом месте линии и сразу же станет в нужное (соответствующее полярности линий) положение. 5) При применении переменного тока передача выбора положения может быть осуществлена методом Сименса, который описан выше. Здесь мы имеем передачу положения с помощью сдвига фаз. В большинстве случаев такой метод применим лишь по проводам (4—5 проводов), но при известцых условиях он м. б. осуществлен и по радио (сдвиг фаз двух частот). 6) Широко распространен как в проводной, так и в беспроводной технике импульсный метод постепенного набора положений (ступень за ступенью). Особенно сильно он развился в системах АТС, откуда распространяется в другие отрасли. Помимо типичных для АТС искателей существует множество систем синхронных передач импульсного типа. Наиболее известны сист. Эриксона, Гейслера, Сперри, Бар и Струд, Виккерса и др. Передатчиками в этих системах служат всевозможные механические и электромеханические (схемные) ключи (генераторы импульсов), соединяемые с задающим элементом. 7) Следующей (не в хронологии, порядке) ступенью за импульсными методами являются т. н. сто п-стартные синхронные распределители типа применяемых в буквопечатающих телеграфных аппаратах (например сист. Телетайп, Шорин и др.). Здесь посылаемый в линию импульс пускает на приемной и передающей станциях две системы коммутаторов (распределителей), идущих затем синхронно и подключающих одновременно соответствующие местные линии. Для того чтобы дать на какую-либо из этих линий «исполнение», необходимо помимо посылки стартового (корректирующего) сигнала послать в нужный момент в линию связи второй, «исполнительный», сигнал. Система эта весьма легко м. б. применена на любой линии связи и дает ряд преимуществ в смысле быстроты, гибкости и независимости посылок. Переходным методом между импульсным и стоп-стартным является метод распределителей, синхронизируемых переменным током (фигура 9, сист. Броун-Бовери). Здесь щетки распределителей передвигаются скачками особым качающимся мотором, раскачиваемым общим для -передатчика и приемника переменным током. Исполнительная посылка в этом случае дается по особому проводу. При необходимости осуществления выбора большого числа линий (50—70) применяют иногда многостоповые распределители, получающие коррекцию несколько раз за оборот. Таковы распределители Сименс и Гальске, где на 40 линий имеется 4 коррекции. В системе Вестерн применены 10 стопов на 50 линий.Число проводов в этих системах с обратным контролем колеблется от 3 до 4. Без обратного контроля необходимы лишь 2—3 провода. 8) К группе «синхронной селекции» относятся и все виды синхронизации, применяемые в технике фототелеграфии (смотрите) и те-, фиг 9левидепия (смотрите). Особенно удобны те из них, которые не связывают передающий и принимающий прибор посылкой сигналов взаимной коррекции, например системауприменяемая фирмой Телефункен для передачи изображений. Скорость и фаза распределяющих барабанов стабилизуются независимыми камертонными генераторами, удерживающими их в постоянном (независимом) синхронизме. Практика показывает, что при хорошо проверенных и помещенных в термостаты камертонах возможно удержать полный синхронизм в течение многих часов и даже дней. При распределителях,^ о. стабилизованных, на долю линии связи остается лишь передача исполнительных сигналов, отличающихся друг от друга лишь временем (моментом) возникновения.
9) Синхронные методы селекции, как мы видели, используют для разделения сигналов распределение их во времени. Другим методом селекции «по времени» является использование длины посылок или длины промежутков между ними («белых» точек и тире). В системах АТС применено использование длинного промежутка между сериями точек (пока абонент заносит палец для выбора следующей цифры) в качестве исполнительного сигнала, переключающего систему с одного искателя на другой. В упомянутой выше системе управления радиолодкой Шово длинный сигнал приводит систему на нуль. Разделение сигналов по «продолжительности» чаще всего осуществляется при помощи включения на приемной станции реле с различной скоростью срабатывания или отпускания (различным запаздыванием и затягиванием). Существуют также различные электромеханические (типа синхронных распределителей и др.) и электрические (типа электрических цепей с различным нарастанием) приборы, позволяющие разделить сигналы различной продолжительности.
Методы селекции (передачи положения) далеко не исчерпываются приведенным перечислением. Весьма часто применяются комбинации. Напр. соединение метода «импульсного» и «продолжительности»дает богатейшую область т. н. кодовой селекции. Соединение метода «полярности» и «синхронного» может сильно увеличить количество возможных команд. Кроме того передаваемые независимые команды м. б.
связаны (скомбинированы) различными способами. Так наир., пять различных сигналов, применяемых в телеграфе Бодо, дают 32, комбинации для передачи букв и цифр. Методы комбинаций дают возможность получить миллионы и даже миллиарды отдельных шифрованных сигналов. Т. о. разумное применение различных методов дает практически бесконечное число передаваемых команд.
I» Группа линейных приборов играет в Т. также важную роль, но требования, предъявляемые к ним, почти ничем не отличаются от требований обычной хорошей уверенной связи (телефон, телеграф, телевидение), почему эти приборы отдельно здесь не описываются. Группа автоматизационно координирующая является
—θ
Фигура 10.
по существу самостоятельной группой, принадлежащей к особой области техники. Укажем лишь, что эта группа по мере развития методов телемеханич. связи терпит значительные изменения, и что иногда схемы автоматизации так связаны со схемами селекции, что нет возможности указать между ними линию раздела.
Модификации ординарной систе-м ы. Рассмотренная подробно основная «телемеханич. пара»—«ординарная система»—имеет две модификации: «циркулярную телемеханич. систему» (фигура 10), состоящую из одной передающей станция а и нескольких приемных b19 Ь2, г8, включенных в общую линию связи I, и «диференцированную телемеханич. систему» {фигура 11), где в линию I включено несколько передающих станций аг, а2, ., ап, работающих на одну приемную станцию b. В такой системе ют селекторной аппаратуры требуется обеспечение независимости работы передающих станций или хотя бы предупреждение «столкновения» одновременной работы их. При [Г----L
наличии проводной линии легко осу- фиг> 11#ществить очередность работы передатчиков разделением их по признаку близости к приемной станции {всегда пропускается сперва работа ближайшей станции) или по признаку очередности занятия линии (если один начал, остальные молчат). При беспроводной линии связи дело обстоит труднее и приходится скорее надеяться на организацию связи (например разделение работы по времени) или на малую вероятность встречной работы, чем на технич. приспособления, могущие гарантировать от случайностей. Рассмотренные нами три модификации телемеханич. пары («ординарная»,«циркулярная» и «диферен-цированная» телемеханич. системы) являются теми основными звеньями, комбинации которых .дают любую сложную систему. Основные звенья могут включаться параллельно (например работа несколькими «ординарными» системами из •одного пункта по радиально идущим линиям), последовательно (передача с переприемом), встречно (например передача обратной поверки о выполнении команды) и т. д. Анализируя т. о. любую сложную задачу телемеханич. связи, можно разбить ее на ряд более простых, сведя к известным общим элементам. Это открывает широкое развитие телемеханических систем в «еще не затронутых телемеханикой областях.
Весь приведенный выше анализ показывает, что Т. трудно сузить и замкнуть в круг нек-рых специальных вопросов. Т. как техника передачи воздействия на расстоянии является таким же всепроникающим принципом, как автоматизация, механизация, моторизация и прочие Укажем лишь, что первоочередной задачей Т. является область производства и распределения электроэнергии. За границей, особенно в Америке, техника диспетчерской службы в энергохозяйстве достигла высокого развития. Лишь частное владение сетями и станциями ставит предел полной реорганизации этой отрасли производства. У нас же в СССР рост отдельных электросиловых узлов, объединение их в единую высоковольтную сеть, соединение с узлами теплофикационных установок и производственных комбинатов говорят за то, что организованная телемеханич. связь есть один из самых важных факторов развития энергетики и всей пром-сти. За энергетикой может последовать громадная область телемеханизации всех видов пром-сти, не исключая и с. х-ва; однако здесь Т. еще долго будет находиться на стадии «сигнализации», ибо слишком трудно полностью механизировать и автоматизировать столь многообразную область. Особенное значение Т. на транспорте видно из стремительного развития СЦБ. Кроме ж.-д. транспорта телемеханизации должны подвергнуться и водные и воздушные пути сообщения. В условиях СССР с необъятными пространствами и гигантскими реками телемеханич. связь должна дать необычайный эффект повышения производительности важнейших отраслей хозяйства страны. Наряду с указанными мирными отраслями не следует забывать область военной техники. Появление описаний управляемых ко-раблей-«мишеней» (например броненосец «Айова» в Америке, «Церенген» в Германии, «Центурион» в Англии), управляемых катеров, самолетов и танков (Франция, Италия, Япония, Америка и др.) есть официальный признак скрытой деятельности заграничных техников, неослабевающей даже в период кризиса и готовящей · для грядущих войн новые невиданные машины разрушения. п. Литвинский.
Лит.: Файвуш Я. и Ар рис он В., Радиотелемеханика, М., 1925; Солодовников А., Элементы телемеханики, реле и синхронные передатчики, Л., 1931; Р о г и н ский, Справочник-руководство по связи и электротехнике, М., 1927; Крафт Т., Электрич. сигнализация, М., 1930; Телемеханически управляемые военные катеры, «Наука и техника», М., 1929, 9, стр. 23; Бранденбург В., Автоматич. телеуправление, «Электричество», 1931, 17, стр. 956; Achenbach V., Die neusten Erfindungen auf dem Gebiete derElektrizitat besonders der Radiotechnik, B., 1924; AignerF., Unterwasser Schalt-technik, B., 1922; Bohnensteingel E.,Elektrische Auto-maten u. pernschalter, Lpz., 1 922; Riidenberg, Relais u. Schutzschaltungen in elektrischenKraftwerken u.Netzen, B., 1929; SchrOter F., Drahtlose Bildertelegraphie nach Telefunken Karolus, «E. u. M.», 1926, 7; Besold H., Fort-schritte in Schnellschaltungbau,«ETZ»,l 928, p.l 7 5; Wili-gutI.,Uhren—Fernenstellung durch drahtlose Zeitzeichnen, ibid., 1928, H.16, p.614;T a t z P., Signaliibertragung auf fahrende Ziige mittels Vechselstrominduktion u.Resonanz, ibid., 1927,p. 1551;RichterH.u. Geffken H.,Eineneue Relais fur extraschwache StrDme, ibid., 1927, p. 1291; Par es у R., Theorie des relais t0l6phoniques et t616gra-phiques, «RGE»,1927; Dubusc R., Relais de d0s£quili-brage, ibid., 1924, p. 659; GoethalsG., The Panama Canal, v. 2, N. Y.1916; Relay Handbook, N. Y. 1926; Todd V., Protective Relays, N. Y., 1922; Smith B. a. Pierce R., Automatic Transmission of Power Readings, «JAIEE», 1924, p. 101; Edson V., Transmission System Relay Protection, ibid.,1 930; p.862; CrichonL., Highspeed Protective Relays, ibid., 1930, p.846; В о d d i e C., Resonant Control for Street Light, «The Electric Journal», 1927; Reynolds, The Photoelectric Cell as a Smoke-Tetector, ibid., 1926,p.l 35; LittlewoodH., Automatic Switching, ibid.,1930, p. 263; Horn H.,Electrical Equipment of the Argentina Battlship «Moreno», «Proceedings
of the Institute of Electrical Engineers», N. Y., 1914, p. 1543; «T616m6canique», P., 1933. С. Таубман.