 > Техника, страница 88 > Уравновешивание машин
> Техника, страница 88 > Уравновешивание машин
Уравновешивание машин
Уравновешивание машин имеет целью устранение вредного влияния на работу последних центробежных и других сил инерции, развивающихся в машине.
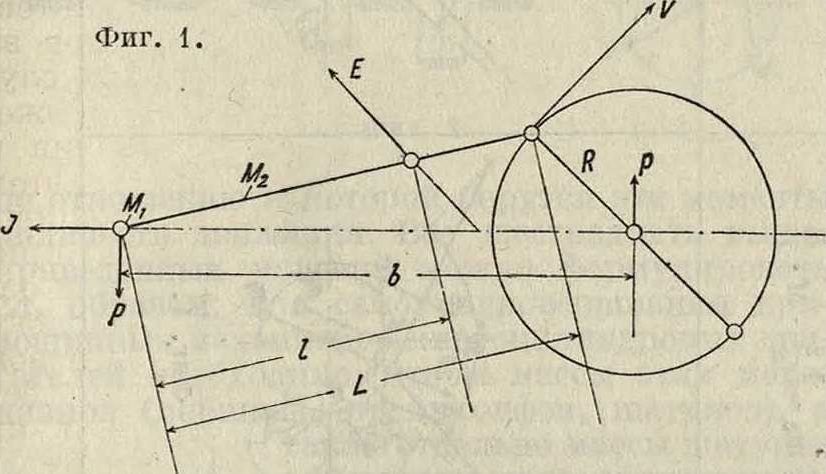
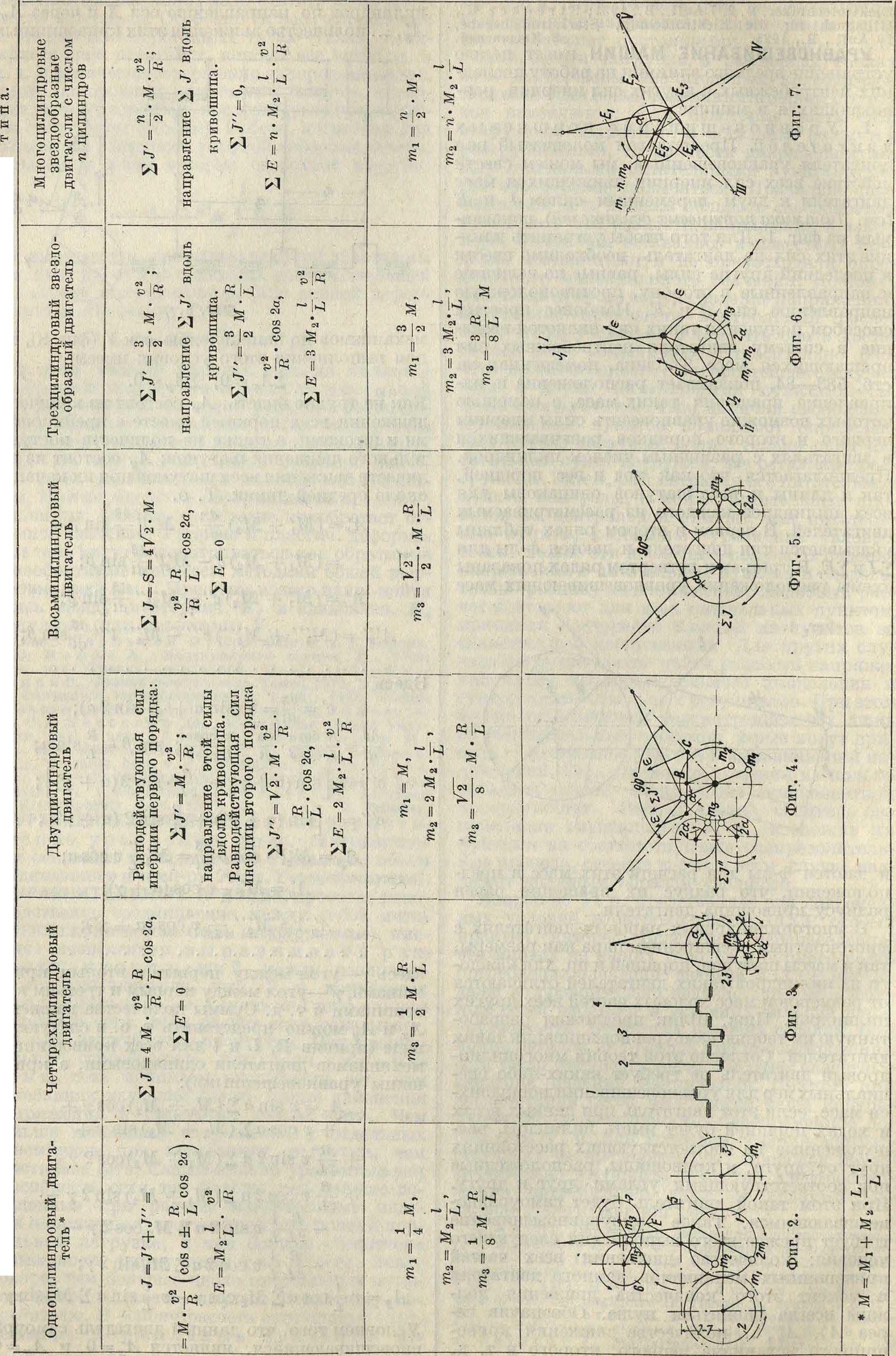
I. Уравновешивание поршневых двигателей. Предполагая коленчатый вал двигателя уравновешенным, мы можем свести действие всех сил инерции движущихся масс двигателя к двум переменным силам J и Е (смотрите Динамика поршневых двигателей), показанным на фигуре 1. Для того чтобы устранить влияние этих сил на двигатель, необходимо ввести в последний другие силы, равные по величине и направленные в сторону, противоположную направлению сил J и Е. Наиболее простым способом получения таких сил является введение в систему двигателя центробежных сил вращающихся масс. Таблица, помещенная на стб. 583—84, показывает расположение и направление вращения таких масс, с помощью которых возможно уравновесить силы инерции первого и второго порядков, развивающихся в двигателях с различным числом цилиндров. Предполагается, что как ход и вес поршней, так и длины и веса шатунов одинаковы для всех цилиндров каждого из рассматриваемых двигателей. В первом и втором рядах таблицы указывается тип двигателя и даются ф-лы для SJ и ΣΕ. В третьем и четвертом рядах показаны схемы расположения уравновешивающих масс
и даются ф-лы для расчета этих масс в предположении, что радиус их вращения равен радиусу кривошипа двигателя.
В многоцилиндровых паровых двигателях с многократным расширением пара как размеры, так и массы шатунов, поршней и прочие для каждого из цилиндров таких двигателей отличаются •от размеров и масс ходовых частей всех других цилиндров. Инж. Шлик предложил разработанную им теорию самоуравновешивания таких двигателей. Согласно этой теории многоцилиндровый двигатель не требует каких-либо спе-циальныхмер для уравновешивания движущихся масс, если этот двигатель при данных весах и ходах поршней будет иметь цилиндры, расположенные на соответствующих расстояниях друг от друга, и кривошипы, расположенные под соответствующими углами друг к другу. При этом такой двигатель будет самоуравно-вешивающимся. Такое самоуравновешивание требует прежде всего выполнения следующего условия: количество движения всех частей кривошипных механизмов данного двигателя и момент этого количества движения должны всегда равняться нулю. Обозначив через Ах, Ах,. количества движения кривошипного механизма первого, второго и т. д. цилиндров по направлению оси×и через Ау, Ау,. количество движения этих кривошипных
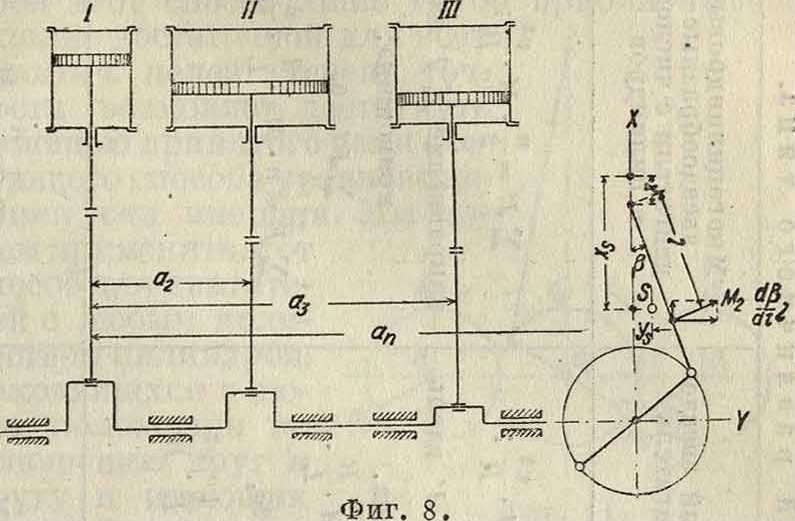
механизмов по направлению оси Y (фигура 8), мы для выполнения этого условия имеем:
ΣΛΧ=0; YAy=0.
Как не трудно видеть, Ах состоит из количеств движения всех поршней вместе с крейцкопфами и штоками, а также из количеств поступательного движения шатунов; Ау состоит из количеств движения всех шатунов при их качании около средней линии. Т. о.
Ах=(М{ + MQ ~ - МД f sin β =
= (М[ + М2) с— МД f sin β;
А’х=(Ml + Мд о" - Мд" f sin β;
Αχ=(Μ". + Ml") o" - ΜГ V" f sin β;
Здесь
e — f — v (sin a
R
sin 2 a);
di “ 2L’
de R Cosa da v COS a 0 R.
Tt=TEXyTt=LEXii’ вш0-хвщв; о"- V [sin (a + -/) + ~ · sin 2 (a + y)] ; e"=v [sin (a + У) + sin 2 (a + y] ; Ay=ΜV cos βά^=Μ2~υ cos a;
Ay=Ml ~ V COS (a -j- y);
Ay"=M’d f v cos (a -f y);
здесь у—угол между первым и вторым кривошипами, у—угол между первым и третьим кривошипами и т. д. Суммы количества движения Ах и Ау можно представить т. о. в следующем виде (приняв R, L и I для всех кривошипных механизмов двигателя одинаковыми, а кривошипы уравновешенными):
Ах=v sin а Σ (Мг + М2) cos у +
+ v cos а Σ (Μχ + Мд sin у +
+ fr v sin 2 α Σ (Μχ + Мд cos 2 у +
+ fj- v cos 2 a £ (M3 + Md sin 2 у —
~YJ.iv s^n 2 a Σ Μχ cos 2 у —
— χ v cos 2 a Σ M2 sin 2 у;
Ay=v -L cos a Σ Mz cos у — v ~ sin a Σ M2 sin y.
Условием того, что данный двигатель самоура-вновешнвающийся, является Ах=0 и Ау=0.
*1У
Схемы расположения и формулы для расчета уравновешивающих масс двигателей различного
Это условие может быть выполнено только в том случае, если
Σ (Mi + М2) cos у=0; Σ (Мх + М2) sin у=0;
V (Мх + М2) cos 2γ=0; Σ (Мх + М2) sin 2у=0;
Σ М2 cos у=0; Σ М2 sin у=0;
Σ М2 cos 2 у=0; Σ М2 sin 2 у=0. (1)
Для того чтобы моменты количеств движений и были также равны нулю, необходимо выполнение следующих условий:
Σ а (Мх + М3) cos у=0; Σ а (Мх + М2) sin у=0; Σα(Μχ + M2)cos2y=0; Σα(Μ1 + Μ2)8ϊη2)=0; Σ α Μ2 cos у=0; Σ « Μ2 sin у=0;
Σ α Μ2 cos 2y=0; Σ я Μ2 sin 2 у=0; (2)
Здесь я, соответственно равное а, а", а",. есть расстояния средней линии первого, второго и т. д. цилиндров от некоторой точки,
по отношению к которой берутся эти моменты количеств движения. Все шестнадцать вышеприведенных условий можно формулировать сл. образом: для самоуравновешивания кривошипных механизмов многоцилиндровых двигателей необходимо, чтобы массы этих механизмов (поршней, крейцкопфов, шатунов), а также отдельно массы шатунов образовывали замкнутые полигоны, у которых углы равны углам кривошипа двигателя или удвоенным углам между ними. Такие же замкнутые полигоны. должны образовывать и произ ведения этих масс на расстояние их от некоторой произвольно взятой точки. Выполнение этих условий возможно для двигателей с количеством цилиндров не менее пяти. При этом взаимно уравновешиваются все силы инерции первого и второго порядка. На практике допускается дальнейшее упрощение, заключающееся в игнорировании условий, касающихся масс шатунов и содержащихся в последних четырех ур-иях каждого из условий (1) и (2). Остальные условия м. б. выполнены в четырехцилиндровом двигателе. Дальнейшее уменьшение числа цилиндровпозволяет лишь частичное выполнение остающихся восьми условий. Вследствие своей сложности описанный способ уравновешивания сил инерции многоцилиндровых двигателей дает, достаточную сте
Фигура 10.
пень точности лишь при количестве цилиндров не менее пяти. При меньшем количестве цилиндров этот способ лишь грубо приблизителен. Вполне достаточной для всех практич. целей степени точности возможно достигнуть помощью принятого нами следующего способа уравновешивания сил инерции. Мы можем применять этот
| способ для двигателей с любым коли | Щ | °г | ||
| чеством цилиндров, | 1.ЛU- | 4 V | 1 Оя |
Фигура и.
Фигура 12.
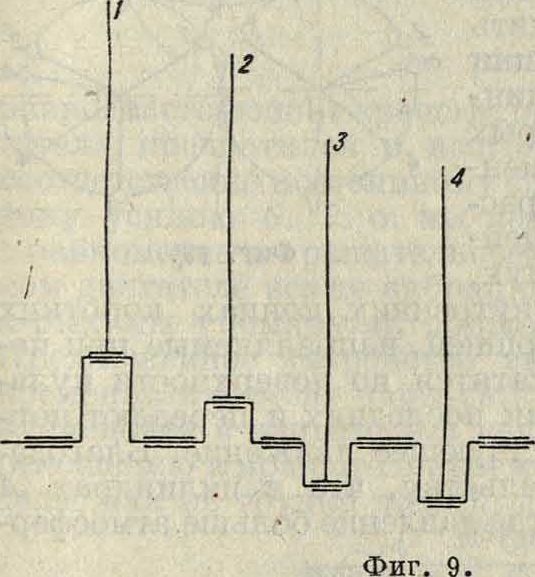
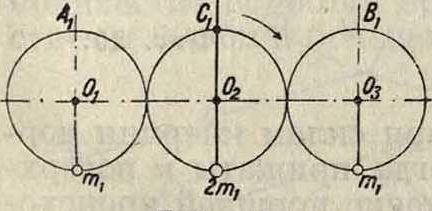
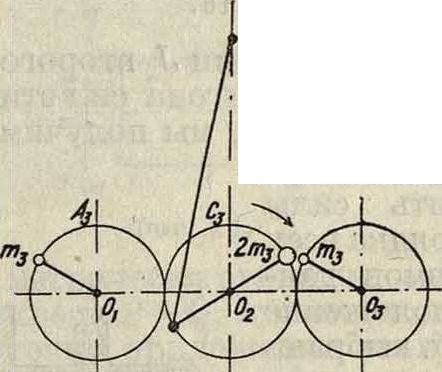
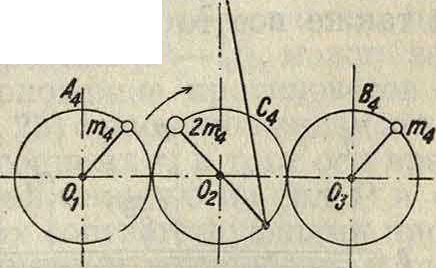
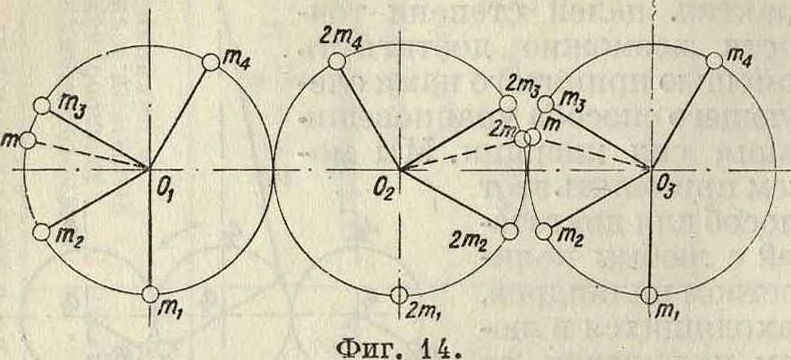
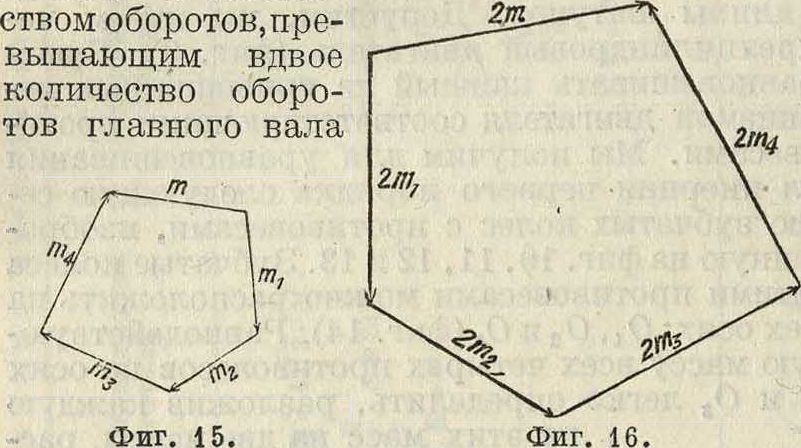
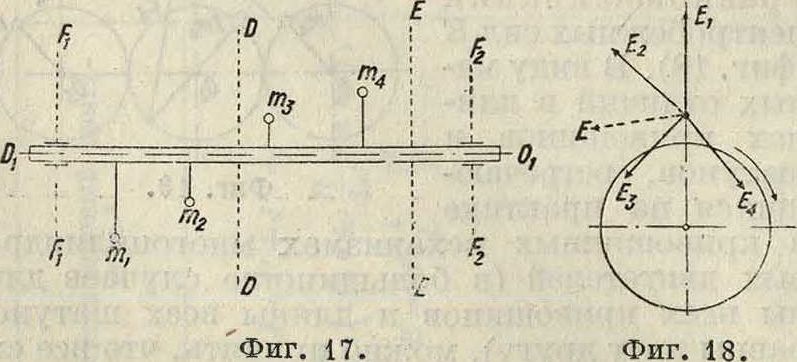
находящихся в любом положении по отношению друг к другу и имеющих различные массы Мх и М2, а также различные ходы поршней и длины шатунов. Допустим, мы имеем четырехцилиндровый двигатель (фигура 9). Будем уравновешивать каждый из кривошипных механизмов двигателя соответствующими противовесами. Мы получим для уравновешивания сил инерции первого порядка следующую серию зубчатых колес с противовесами, изображенную на фигуре 10,11,12 и 13. Зубчатые колеса с этими противовесами можно расположить на трех осях: Ох, 02 и 03 (фигура 14). Равнодействующую массу всех четырех противовесов на осях Οι и О, легко определить, разложив каждую из этих масс на две массы, расположенные в среднем сечении Fi и F2 (фигура 17) каждого из подшипников, в которых покоятся эти оси, и построив для составляющих масс каждого из этих сечений соответствующий полигон (фигура 15 и 16) с углами, равными углам между кривошипами. Замыкающая сторонакаждого такого полигона и будет представлять собою равнодействующую массу всех четырех составляющих в каждом из средних сечений подшипников. Сумма этих двух равнодействующих дает нам искомые равнодействующие противовесы, которые должен быть помещены в соответствующих плоскостях D и Е в средней части каждой из осей Ох и 02. Противовесы на оси 02 располагаются в соответствующих коленах коленчатого вала. Т. о. для уравновешивания сил инерции первого порядка многоцилиндрового двигателя мы имеем возможность ограничиться ι
лишь тремя зубчатыми колеса- |
ми с противовесами т, 2 те и т.
Так же мы должны поступить и при уравновешивании центробежных сил Е (фигура 18). В виду малых отличий в длинах кривошипов и шатунов, встречающихся на практике в кривошипных механизмах многоцилиндровых двигателей (в большинстве случаев длины всех кривошипов и длины всех шатунов равны друг другу), можно принять, что все силы Е действуют на одну ось. При помощи^по-лигона этих сил можно найти их равнодейсттвующую Е и уравновесить ее соответствующим
Фигура 13.
противовесом. Расположение этого противовеса можно выбрать также в одной из плоскостей в средней части двигателя, наиболее удобной из конструктивных соображений. Что касается
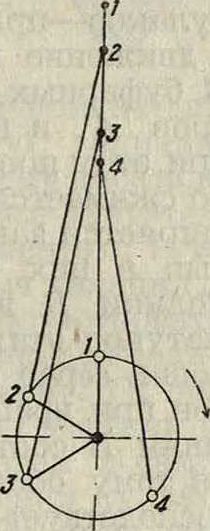
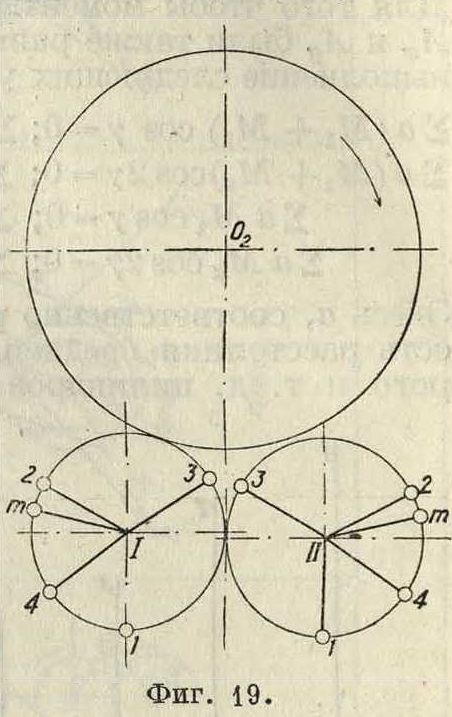
уравновешивания сил инерции J второго порядка, то и зцес мы можем расположить на осях I и II (фигура 19) противовесы 1,2, 3 и 4, враща ющиеся с количе-
и уравновешивающие силы инерции J второго порядка. Слагая при помощи полигона сил эти массы для каждой из осей I и II, мы получим две равнодействующие массы т, способные уравновесить силы инерции J второго порядка всех кривошипных механизмов данного двигателя. Расположение этих противовесов м. б. выбрано также наиболее удобным из конструктивных соображений.
II. Выравнивание вращательных моментов.
К уравновешиванию поршневых двигателей необходимо отнести и выравнивание их вращательных моментов. Периодически изменяющиеся тангенциальные силы, действующие на валу двигателя, могут явиться источником самых разнообразных вибрационных явлений, из которых прежде всего отметим крутильные колебания вала или связанных с ним частей двигателя, колебания изгиба таких частей двигателя, как например пропеллер, а также все те колебания двигателя, которые
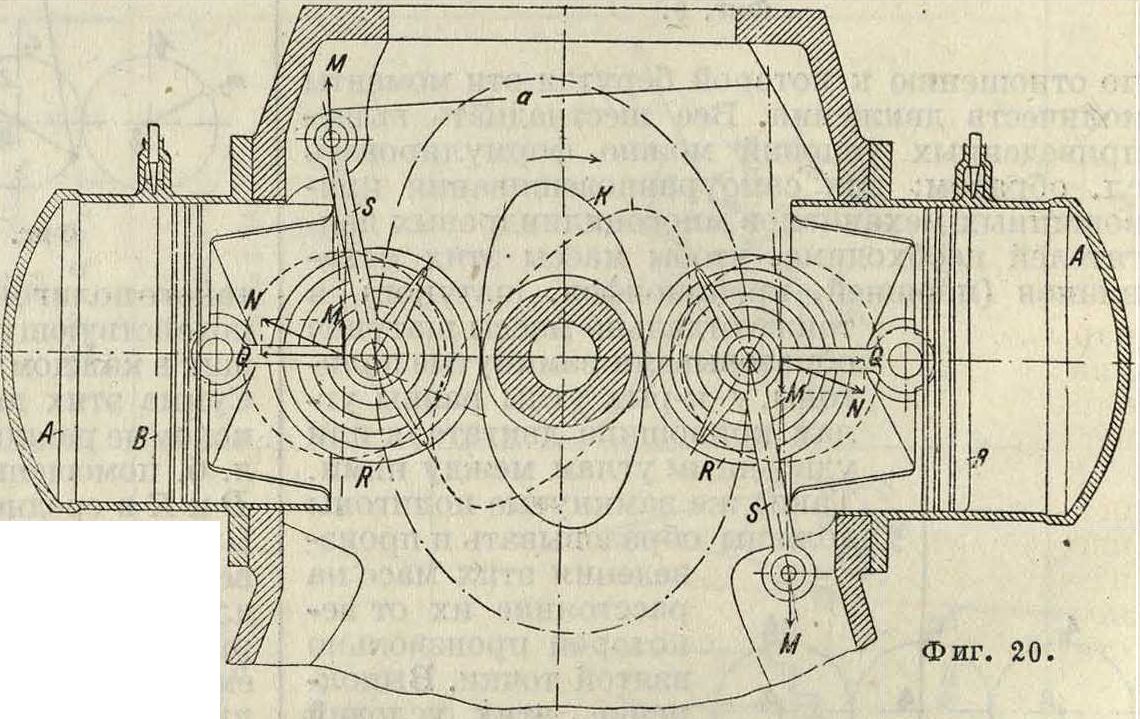
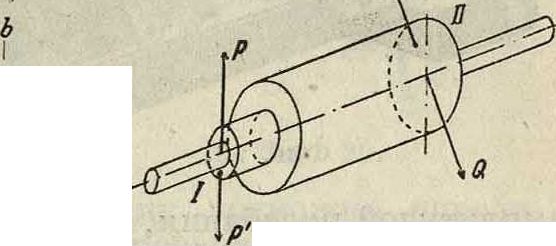
могут возникать под влиянием пар сил Рb (фигура 1). Как было установлено эксперимен тальным путем, эти вибрации могут явиться причиною значительных потерь в мощности двигателя, доходящих до 10 и более %. Для устранения этих вибраций существует способ выравнивания вращательных моментов и их реакций в поршневых двигателях. Сущность этого способа состоит в следующем. В центральной части коленчатого вала двигателя между двумя средними коренными подшипниками устанавливается кулачковый диск К (фигура 20) с количеством кулаков, равным количеству цилиндров для двухтактных двигателей и половине этого количества для четырехтактных двигателей. Назначение этих кулаков—приводить в движение поршни В буферных цилиндров А, в которых при этом попеременно сжимается и расширяется заключенный в них воздух.
Ролики В на внутренних концах коротких шатунов этих поршней, направляемые при помощи серег S, катятся по поверхности кулаков при вращении последних и передают поршням В соответствующее движение. Благодаря тому обстоятельству, что в цилиндрах А господствует всегда давление больше атмосфер ного, а также благодаря силам инерции поршней В ролики В всегда прижаты к поверхности кулаков, и движение поршней происходит точно в соответствии с очертанием этих кулаков. Это очертание делается т. о., чтобы работа сжатия и расширения заключенного в цилиндрах А воздуха совершалась соответственно очертанию диаграммы тангенциальных сил двигателя (фигура 21) и притом так, чтобы избыточная-работа Р данной диаграммы поглощалась сжатием воздуха в буферных цилиндрах и недостаточная работа Q возмещалась обратно коленчатому валу работою расширения воздуха в этих цилиндрах. Начало сжатия воздуха в последних должно совпадать с положением первого кривошипа двигателя в точке А диаграммы; конец сжатия—в точке В этой диаграммы. На-
чало и конец расширения воздуха в буферных цилиндрах должны соответствовать точкам В и С диаграммы. Очертание кулаков К необходимо сделать таким, чтобы аккумулирование избыточной энергии и возвращение этой энергии коленчатому валу происходило так, чтобы
Фигура 21.
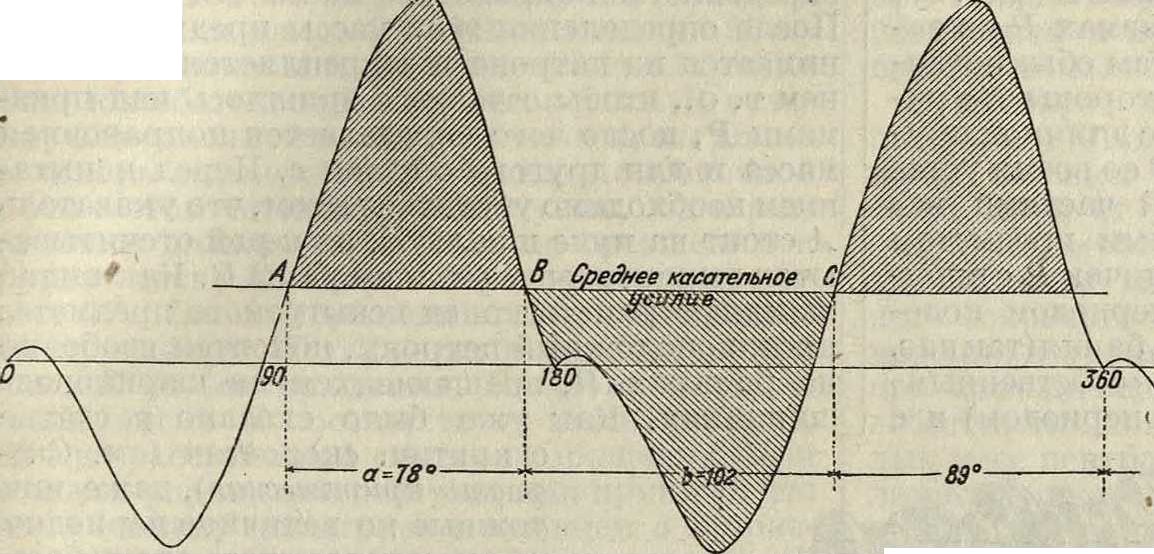
равнодействующий вращательный момент двигателя превратился в постоянную величину соответственно постоянному среднему касательному усилию S. Т. о. мы получаем двигатель с равномерным вращательным моментом. В таком двигателе все те вибрационные явления, о которых мы упомянули, должны отсутствовать. Предложенное устройство выравнивает одновременно и момент пары сил РЬ (фигура 1), появляющейся в двигателе в качестве реакции по отношению к вращательным моментам. В самом деле, как не трудно видеть, давления кулаков
К (фигура 20) на ролики R создают пары сил Ма, равные соответственно избыточным или недостаточным вращательным моментам двигателя и направленные в сторону действия этих последних. Благодаря этому пары сил Ма, слагаясь с парами сил РЬ, выравнивают последние, уничтожая т. о. все вибрационные явления, связанные с возникновением периодически изменяющихся пар сил РЬ.
III. Уравновешивание вращающихся масс. Уравновешивание вращающихся масс приобрело особо важное значение в современных быстроходных машинах, в которых количество оборотов вращающихся частей достигает 30 000 и больше в мин. (турбины Лаваля, жироскопы Сперри и др.). Даже при
Фпг. 22.
Фигура 2 3.
Фигура 24.
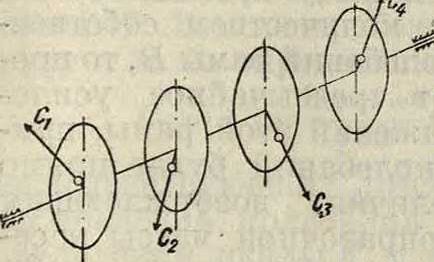
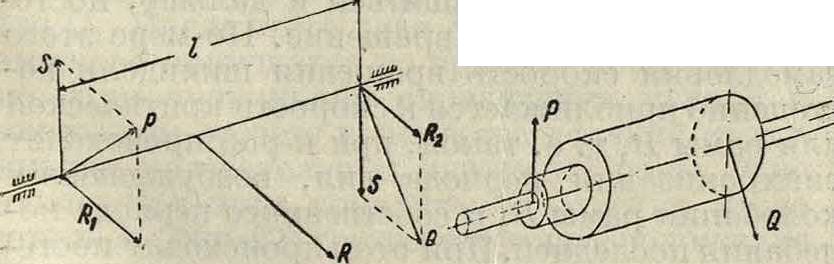
количествах оборотов, значительно меньших, чем вышеуказанные, небольшие отклонения в расположении ц. т. вращающейся массы относительно центра вращения вызывают весьма большие центробежные силы, сопровождаемые целым рядом нежелательных явлений, как то: вибрации самой машины или ее частей, вибрации фундаментов и т. д. Уравновешивание вращающихся масс с целью избежать эти вредные явления заключается в определении вышеуказанных отклонений ц. т. вращающейся массы от оси вращения и в приведении этого ц. т. к совпадению с этой осью и притом так, чтобы при вращении массы не могло появиться пар центробежных сил. Представим себе вращающуюся массу (фигура 22), разделенную на бесконечно большое количество тонких дисков, из которых на фигуре даны только четыре. Каждый такой диск не является точно уравновешенным, то есть центр тяжести его не лежит на оси вращения, а находится от последнего на некотором расстоянии, как показано на фигуре. Происходит это, с одной стороны, из-за неточности обработки и, с другой стороны, вследствие неравномерного расположения материала вращающейся массы. При вращении последней каждый такой диск обладает вследствие этого некоторой центробежной силой Сг, С2, С3, С4,. По законам механики все эти силы можно геометрически сложить, в результате чего мы получим нек-рую силу R и пару сил S-Ι (фигура 23). Разложив силу R на две силы Рх и R2, расположенные в точках прилоясения сил S, и сложив гео-
вл
| _ | 1 1 | ||
| *5* | |||
| ‘ |
Фигура 25.
Фигура 26.
метрически эти силы, мы получим т. н. силовой крест Р—Q, причем, как это не трудно видеть, точки приложения этих сил (Р и Q) м. б. расположены в любых точках оси вращения в зависимости от мест расположения тех масс, при помощи которых должен быть уравновешена данная масса. При уравновешивании какой-либо вращающейся массы (например изображенной на фигуре 24), С-1-1-‘-1
| /*i
0ii5486 |
1
«i |
’Η
tern |
Μ | If d
J___________J |
|
| V JR) | Ψ | w | ff | --Ψ Le | h |
| .1_- | |||||
Фигура 2 7.
J-
неуравновешенность которой изображается подобным же силовым крестом (Р—Q), можно заранее наметить расположение противовесов в сечениях ааяЬb (фигура 25) с расположением этих противовесов на расстояниях га и гь от оси вращения. Уравновешивая каждую из сил Р и Q в заданных плоскостях соответствующими противовесами, производящими центробежные силы P и Q (фигура 26), равные силам Р и Q и направленные в стороны, противоположные нащэавлению последних, мы таким образом уравновесим данную массу.
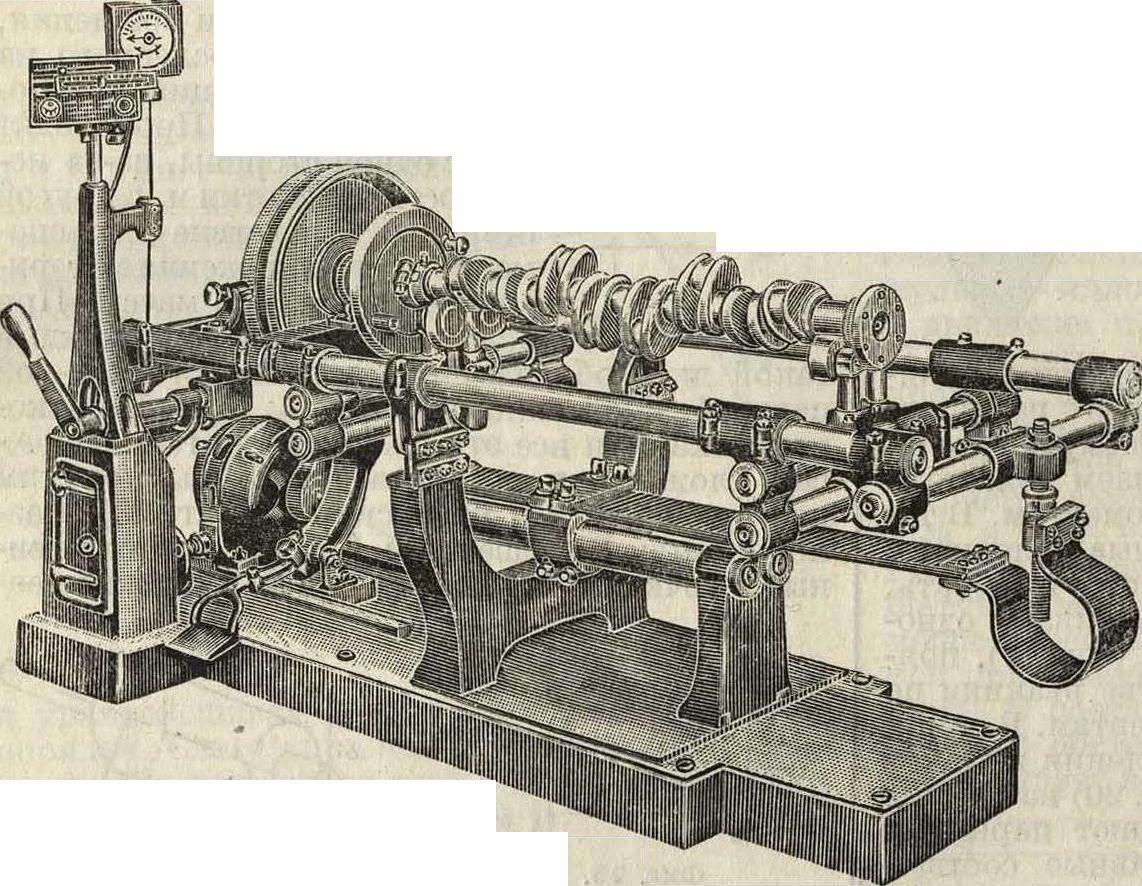
Для такого уравновешивания, получившего название динамического, существует целый ряд различных машин, позволяющих производить это уравновешивание с большой степенью точности. Одной из таких машин является америк. машина сист. Гишольта, изображенная схематически на фигуре 27. Фигура 28 показывает эту машину, предназначенную для уравновешивания коленчатых валов. Конструкция этих машин и принцип их действия явствуют из нижеследующего. Легкая рама В (фигура 27) покоится с одной стороны на призмах Р из закаленной стали, подобных призмам обыкновенных рычажных весов. С другой стороны эта рама связана при помощи серьги L с длинной пружиной S, которая позволяет раме В со всеми установленными на ней частями машины и испытуемым предметом колебаться вокруг точек Р с вполне определенным периодом коле-бания(такназ. «собственным» периодом) и с
нетрудно ви-
Фигура 28.
амплитудой колебания, пропорциональной величине сил, производящих эти колебания. Как деть, период колебания рамы В зависит прежде всего от величины колеблющихся масс и от жесткости пружины S. От величины сил, возбуждающих эти колебания, период последних не зависит. Бабка Е, помещенная на этой раме, несет на себе шпиндель, на одном конце которого помещается тяжелый диск К с противовесом W, а на другом конце, в к-ром закрепляется один конец испытуемого предмета.Про-тивовес W можно передвигать в радиальном направлении и закреплять в соответствующем положении на требуемом расстоянии от оси вращения. Это расстояние отсчитывается на соответствующей шкале на диске К при помонш нониуса, помещенного на противовесе. Диск К, и шпиндель являются вполне уравновешенными динамически, когда нониус противовеса W стоит на нуле шкалы на диске К. При помощи педали, показанной на фигуре 28, фрикционный ролик, получающий свое вращение от электромотора, помещенного внизу машины, м. б. прижат к диску К. Последний т. о. приводится во вращательное движение с желаемой скоростью вращения. После того как эта скорость будет достигнута, фрикционная связь между диском К и электромотором прекращается, и диск вместе со шпинделем, ом и испытуемым предметом продолжает по инерции вращаться дальше, постепенно замедляя свою скорость вращения. Испытуемый предмет, обозначенный пунктиром на фигуре 27, обладает некоторой неуравновешенностью, выражаемой силовым крестом с силами в сечениях d и с. Необходимо определить эти силы или, другими словами, необходимо определить те массы, которые необходимо прибавить или отнять в сечениях с и d, и положение этих поправочных масс в этих сечениях, для того чтобы получить вполне уравновешенный предмет М. В положении этого предмета, показанном на фигуре 27, определяется поправочная масса для сечения d. После определения этой массы предмет М вынимается из а и закрепляется в последнем т. о., чтобы сечение d пришлось над призмами Р, после чего определяется поправочная масса и для другого сечения с. Перед испытанием необходимо убедиться в том, что указатель А стоит на нуле шкалы F, на которой отсчитываются амплитуды колебаний рамы В. Как видно из иллюстраций, конец испытуемого предмета, противоположный у, покоится свободно на роликах R, вращающихся на шарикоподшипниках. Как уже было сказано в статье о критич. скоростях (смотрите Скорость критическая), даже ничтожные по величине периодич. силы могут вызвать очень большие колебательные движения тяжелых масс, если период изменения периодич. сил совпадает с периодом собственных колебаний этих масс. Для описываемой системы силами, возбуждающими эти колебательные движения, являются вертикальные составляющие центробежных сил неуравновешенных масс. Если количество оборотов испытуемого предмета в единицу времени совпадает с количеством собственных колебаний рамы В, то произойдет чрезвычайное усиление колебательных движений этой рамы, причем амплитуда этих колебаний будет прямо пропорциональной величине возбуждающих сил, то есть величине поправочной массы в сечении испытуемого предмета. Определение этой поправочной массы производится следующим образом. Как уже было указано выше, шпиндель машины вместе с испытуемым предметом приводится при помощи электромотора в быстрое вращательное движение с количеством оборотов в единицу времени большим, нежели число собственных колебаний рамы В в ту же единицу времени. Когда желаемая скорость будет при этом достигнута, связь диска К с электромотором прерывается, и диск вместе с шпинделем и испытуемым предметом продолжает по инерции вращаться и дальше, постепенно замедляя свое вращение. По мере этого замедления скорость вращения шпинделя постепенно приближается к скорости критической для рамы В, то есть такой, при которой происходит· синхронизация периода сил, возбуждающих колебания рамы В, и собственного периода колебания последней. При этом происходит постепенное увеличение амплитуды колебания рамы В, пока размах не достигнет максимума при достижении шпинделем указанной критич. скорости. При дальнейшем уменьшении скорости вращения шпинделя колебания рамы начинают постепенно уменьшаться. Указанная максимальная амплитуда колебания рамы В, наблюдаемая при помощи указателя А на шкале F, дает возможность определить поправочную массу сначала в сечении d, а затем и в сечении с. Амплитуда колебания рамы В пропорциональ-
на этим массам. Одному делению шкалы F соответствует определенная масса в з на расстоянии в 1 еда от оси вращения.Так например, одному делению этойшкалы может соответствовать масса 100 з на расстоянии в 1 еда от оси вращения. Тогда п делениям шкалы F будет соответствовать масса 100 п г на расстоянии в 1 еда от оси вращения или например 4 п г на расстоянии 25 еда от оси вращения и т. д. Определив т. о. при помощи колебательного движения рамы В величину поправочной массы в сечении d, мы должны теперь определить положение поправочной массы в этом сечении, то есть тот угол, под которым эта масса должна находиться по отношению к прорезу диска К, в к-ром передвигается противовес W. Для определения этого угла передвинем противовес W также па п делений шкалы диска К от оси вращения. Каждому делению шкалы диска К соответствует также масса в 100 з на расстоянии 1 сантиметров от оси вращения. При этом для упрощения рассуждения принято, что плечо I между испытуемым сечением d и призмами Р равно плечу I между противовесом W и этими призмами. После установки противовеса W диск вместе со шпинделем и испытуемым предметом снова приводится в быстрое вращательное движение и так же, как и в первый раз, при замедлении этого вращательного движения, когда скорость последнего становится равной критич. скорости, рама снова начнет резко колебаться, причем указатель А покажет нек-рую амплитуду колебания, выражаемую например т делениями шкалы К. Нетрудно видеть, что эти колебания возникают в результате действия центробежной силы Сг неуравновешенной массы в сечений d и центробежной силы С2 противовеса W. Эти центробежные силы равны друг ДРУГУ и м· б. определены из ур-ия:
г - η- 100η·ω2 о 01 - п“2*·? w— о2— „S1fl υ,υι — кз.
Равнодействующая С3этих двух сил производит, как показано, колебания рамы В с амплитудой в т делений шкалы F, то есть эта равнодействую-
7710)2 тт
щая равна кг. Имея эти данные, можно определить теперь искомый угол а. Как не трудно видеть,
Угол а определяет т. о. положение поправочной массы в сечении d. Для проверки полученного результата диск К поворачивается на своей оси на угол а по отношению к у, так чтобы центробежная сила Сг противовеса W была направлена в ту же сторону, что и центробежная сила С-у. После этого диск К вместе со шпинделем снова приводится во вращательное движение. При правильном определении угла а и правильном отсчете количества делений тип никаких колебательных движений рамы. В не должно при этом появляться. Отметив после этого в М (фигура 27) соответствующее положение поправочной массы, ее удаляют путем высверливания или другим каким-либо способом, уравновешивая т. о. правую часть испытуемого предмета. Вместо удаления этой поправочной массы можно на противоположной стороне последнего добавить соответствующую массу, способную уравновесить полученную поправочную массу. Повторив те же действия и для левой части уравновешиваемого предмета, мы получил! полное статич. и динамич. уравновешивание последнего. Максимальная амплитуда ко-
лебаниярамымашинырегистрируетсяспециель-ным индикатором, показанным на фигуре 28 слева от машины. Этот индикатор имеет две стрелки, из которых одна колеблется около своего среднего положения соответственно колебаниям рамы, в то время как другая стрелка, увлекаемая первой только в одном направлении, остается неподвижной в крайнем положении, указывающем максимальную амплитуду колебания рамы.
Существует еще целый ряд конструкций машин для динамич. уравновешивания. Таковы например машины Нортона, Олсена и др. Отличаясь друг от друга в конструктивном отношении, все эти машины исходят из одного основного принципа измерения неуравновешенности при помощи возбуждения колебательных движений тяжелых масс центробежными силами, возникающими при вращении предметов, подлежащих уравновешиванию. При
Фигура 29.
Фигура 30.
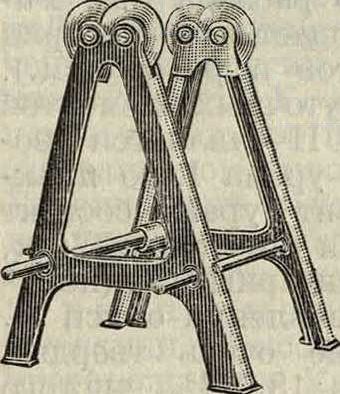
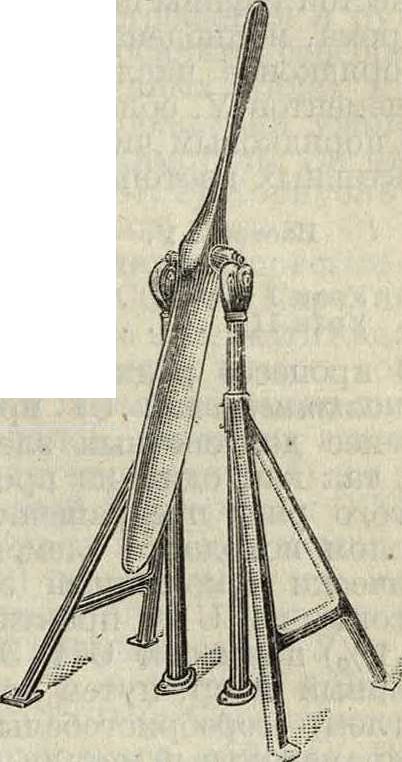
помощи описанных машин возможно определять расстояния ц. т. проверяемых деталей от оси вращения в 0,003 до 0,001 дада и исправлять такие неточности. Очень часто вместо динамич. уравновешивания прибегают к т. н. статич. уравновешиванию при помощи приборов, изображенных на фигуре 29 ц и 30. Во всех этих приборах уравновешиваемый предмет |

ски с каленою поверхностью, расположенные попарно с каждой стороны прибора. Медленно поворачивая испытуемый предмет на этих дисках, можно легко определить ошибку в расположении его ц. т. С более тяжелой части этого предмета снимается излишняя часть материала, и его ц. т. приводится т. о. к совпадению с осыо вращения. Благодаря ничтожно малому трению дисков при их вращении уравновешивание многих деталей машин удается производить с значительной степенью точности. Такие приборы употребляются для узких деталей,каковы например воздушные пропеллеры, маховики и т. д. Существуют конструкции таких приборов в соедине-
нии с сверлильным станком, при помощи которых из проверяемых деталей (например маховика, показанного на фигуре 31) высверливается в соответствующих местах излишек металла. Как не трудно видеть, такой способ уравновешивания пригоден только для таких деталей, в которых пару сил S-Ι (фигура 23) можно не принимать ВО внимание. Л. Мартенс.
Лит.: см. Динамика поршневых двигателей, Скорость критическая.