 > Техника, страница 90 > Фототриангуляция
> Техника, страница 90 > Фототриангуляция
Фототриангуляция
Фототриангуляция, определение дополнительных ориентировочных (фотограмметрических) точек, необходимых для фототрансформирования (смотрите) снимков без выхода на местность, при наличии самого ограниченного числа наземных точек геодезич. основы. Применение Ф. в аэрофотосъемке (смотрите) обусловливается необходимостью удешевления и ускорения создания сети точек для трансформирования снимков, для чего надо иметь на каждом аэроснимке четыре ориентировочные точки. Но не всегда эти точки можно определить на местности. Например при создании сети ориентировочных точек в лесистых местах или в непроходимых болотах геодезич. измерения затруднительны и требуют значительных времени и расходов материальных средств. Сущность развития Ф. на снимках основана на том, что пересечение направлений, проведенных из фокальных точек (смотрите ниже) перекрывающихся между собой снимков на идентичные точки каждого из них, дает истинное положение этих точек в плане. Для уяснения сущности Ф. рассмотрим два последующих снимка, сделанных при строго вертикальном положении оптич. оси и перекрывающихся между собой на 60%, причем,
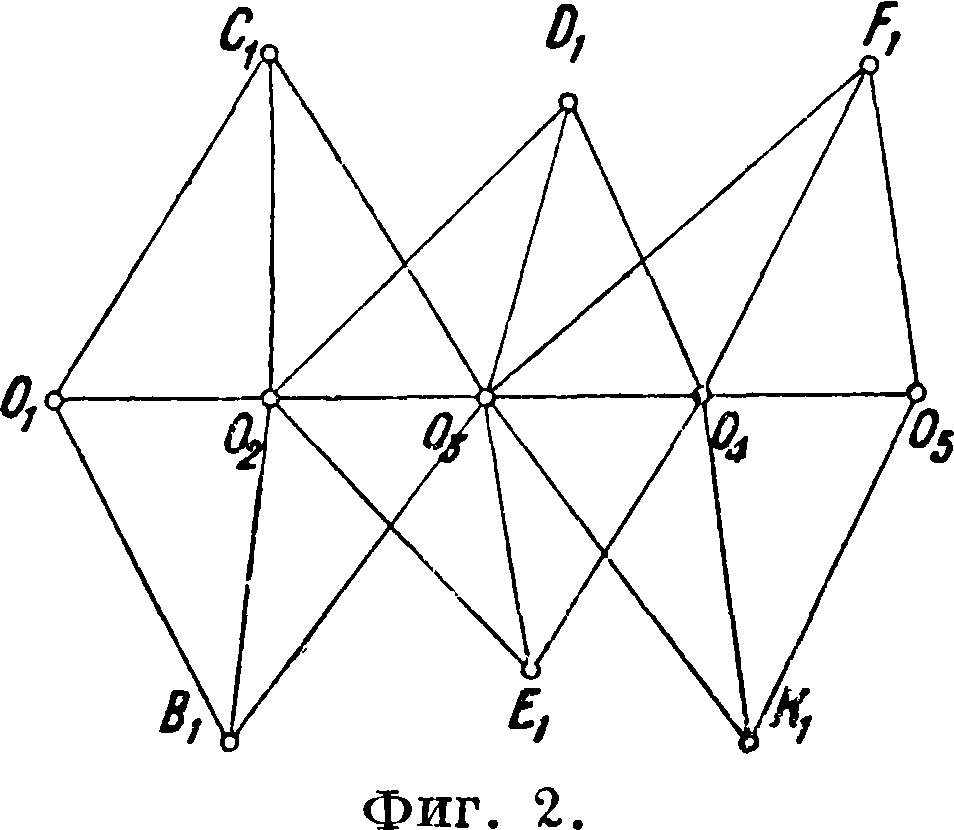
предполагаем, что снятая местность горизонтальна и плоска. Вследствие того что снимки сделаны при строго вертикальном положении оптич. оси и плоскости этих снимков параллельны плоской местности, ситуационные контуры на снимках должен быть подобны соответствующим контурам местности, и углы между какими-нибудь направлениями на снимках в точности равны углам между соответствующими направлениями на местности. Направления ОгО2 и 01В1 на снимке (фигура 1) заключают между собою угол βλ направления 020г и 02В2—угол β2 и т.‘д. Измеряя на снимках эти направления и принимая базис 0г02 известным, получим все данные, необходимые для построения засечки только пока в неизвестном масштабе. Если точки О! и О 2—фокальные точки снимков, то из самих снимков при помощи описанного выше определим положение точек В, С и т. д. Присоединяя подобным образом третий, четвертый и т. д. снимки, получим в результате цепь тр-ков (фигура 2). Масштаб этой цепи тр-ков во всех ее частях одинаков с масштабом принятого за известный базиса 0г02. Поскольку последний неизвестен, следовательно и масштаб сети и ориентирование неизвестны. Но как только будет определено положение двух каких-нибудь точек этой сети, например концов базиса ОгО 2, этим самым определится масштаб и ориентирование сети. Т. о. для случая горизонтальной местности определение ориентировочных точек на самих снимках возможно при условии, что снимки сделаны при строго оптической оси, чего на практике не бывает. Почти все снимки имеют искажение от наклона местности и крена самолета. Из теории искажения снимков известно, что, каков бы ни был наклон аэроснимка, на нем всегда имеется точка, называемая фокальной (точкой нулевых искажений), углы при которой в точности равны соответственным углам на местности. Поэтому если за центры снимков (фигура 2) брать фокальные точки, то построение даст сеть, подобную той, которая была бы получена методами наземной триангуляции (смотрите). Но здесь приходится столкнуться с вопросом определения фокальной точки. Для определения положения на снимке фокальной точки необходимо знать угол наклона а и угол крена х. Если бы углы наклона и крена были известны, то тогда расстояние фокальной точки от главной определилось по ф-ле
d0=F tg^
(главной точкой называется та, через к-рую Проходит оптич. ось объектива); расстояние надирной точки от главной—по ф-ле
dH=F tg α
(надирной точкой называется точка, лежащая на вертикали), что дает при α= 3° и
F=20 сантиметров расстояние надирной точки от главной, равное 1 см, а расстояние фокальной точки от главной—примерно 0,5 см. Если для отсчета, направлений вместо фокальной точки пользоваться главной точкой снимка, то средняя ошибка направления, то есть угла, отсчитанного от нек-рого начального направления, будет выражаться в мин.:
т=± 0,607 sin2 а.
Вычисленные по этой формуле значения т для разных углов приведены ниже:
а. 1° 2° 3° 4° 5° 6° 7° 8° 9° 10°
т. 0,2 0,7 1,7 3,0 4,6 6,6 9,0 11,8 14,8 18,3
Величина ошибки в положении засекаемой точки зависит не только от ошибки в угле, но и от длины стороны тр-ка, образующегося при засечке. При наибольших употребительных форматах снимков 18x24 эта длина от главной точки снимка до засекаемой точки не м. б. больше 12—13 см. Дальнейшие вычисления показывают, что для того, чтобы при этих условиях указанная ошибка не была больше графич. точности (0,2 миллиметров), ошибка в угле не должна превышать примерно 5. Отсюда вытекает, что при углах наклона, не превышающих 3°, вполне допустимо пользоваться вместо фокальной точки главной точкой снимка. С Другой стороны > наблюдения показывают, что при нормальных условиях съемки (60—65% перекрытия всех снимков) снимки имеют углы наклона, не превышающие 3°. Наличие снимков с ббльшими углами наклона приводит к тому, что в Ф. получаются невязки. По этой причине практически необходимо на всю сеть брать не две ориентировочные точки, определенные геодезически, а больше, чтобы этим дать возможность произвести уравнивание сети между этими точками. Что касается разности высот, то при пользовании для Ф. главной точкой вместо надирной точки среднее поперечное смещение qm засекаемой точки определяется ф-лой
qm=Ftga^hf^m,
где khmax—наибольшая разность высот в пределах одного снимка, а т—знаменатель численного масштаба Ф. Если принять, что угол наклона в среднем равен 3°, то эта формула примет вид
Q_m ~ i о,ОШАЬтахт.
Вычисление по этой формуле для различных масштабов и разностей высот дает диаграмму.
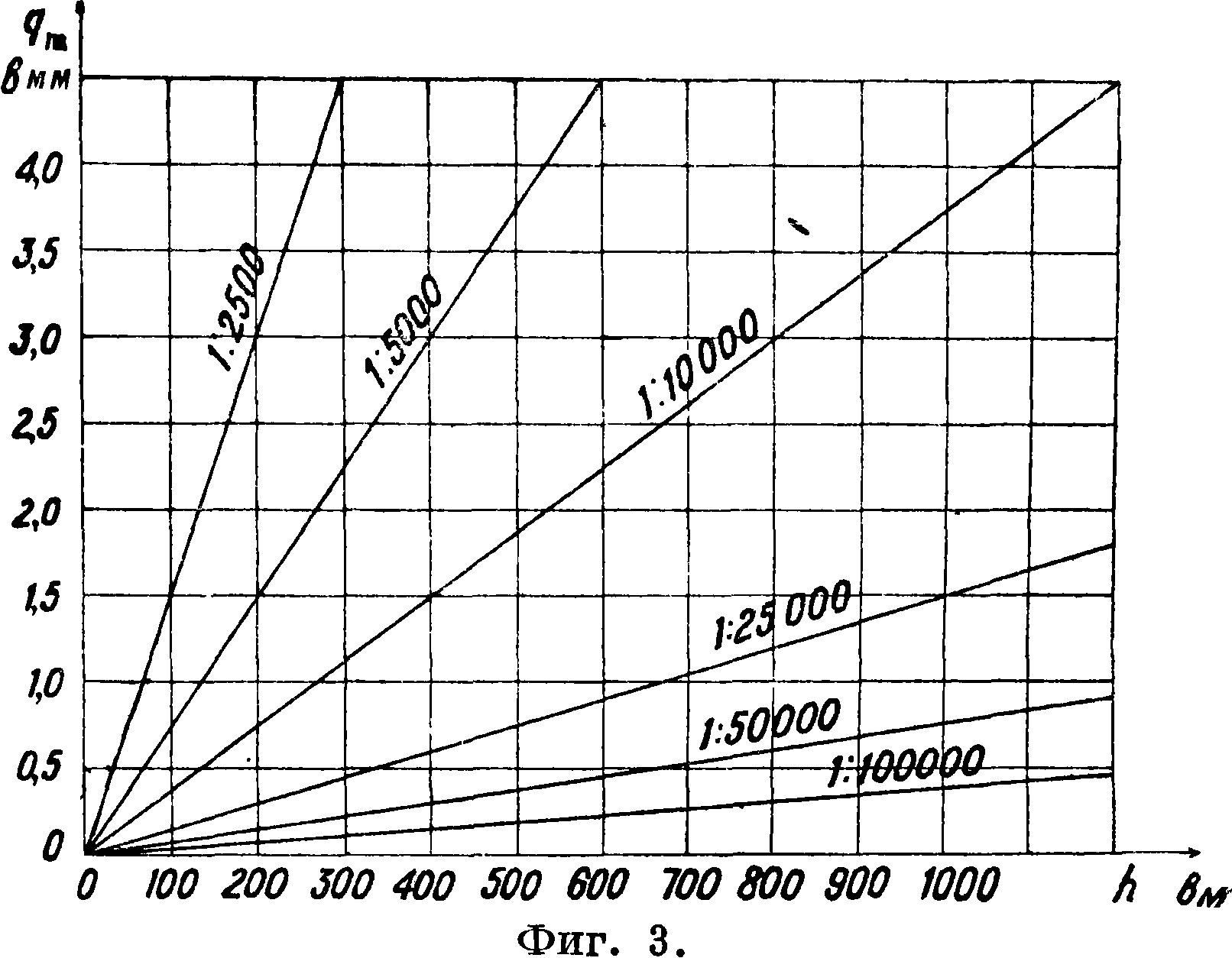
изображенную на фигуре 3. Она показывает, что^ графич. точность при Ф. не будет нарушена, если при обработке снимка в указанном ниже·
| 1 с | Сг П | |
| ч | ||
| в, | 4 |
Фигура 1.
вертикальном положении масштабе разность высот в пределах одного снимка не будет превышать сл. величин:
| 1 | 1:2 500 | 1 : 5 000 | 1 : 10 ООО |
| т | 12 | 30 | 60 |
| 1 | 1 : 25 000 | 1 : 50 ООО | 1 : 100 000 |
| т
Ahmnx в м · · · · |
130 | 300 | 600 |
Развитие Ф. состоит из следующих основных процессов: 1) накидного монтажа (смотрите Фото-план) и определения центров (главных точек) снимков (по меткам), 2) разбивки сети в заданном или произвольном масштабе и 3) переноса сети на геодезии, основу (ее сгущение), по которой будет в дальнейшем вестись трансформирование снимков. Ф. производится графич. и аналитич. методами. Графич. Ф. в свою очередь может вестись при посредстве специальцого прибора— надир-триангулятора или при посредстве калек в масштабе геодезии, основы или в произвольном масштабе.
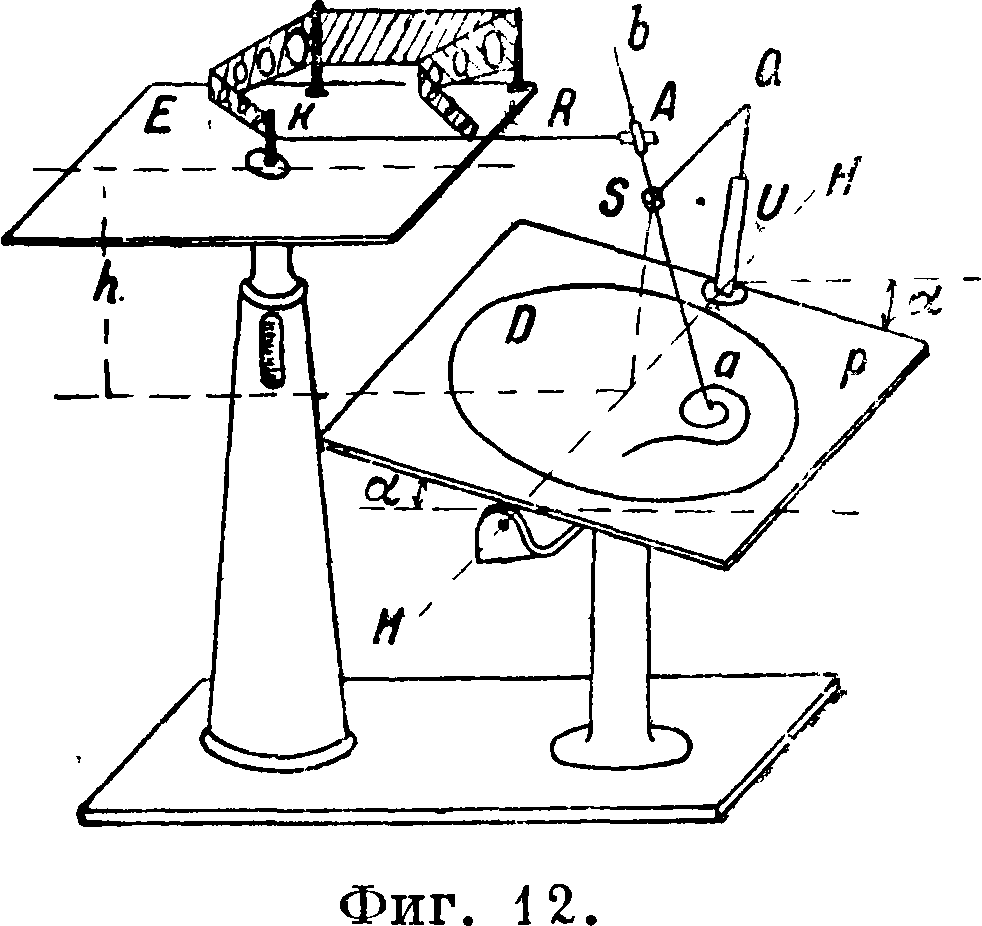
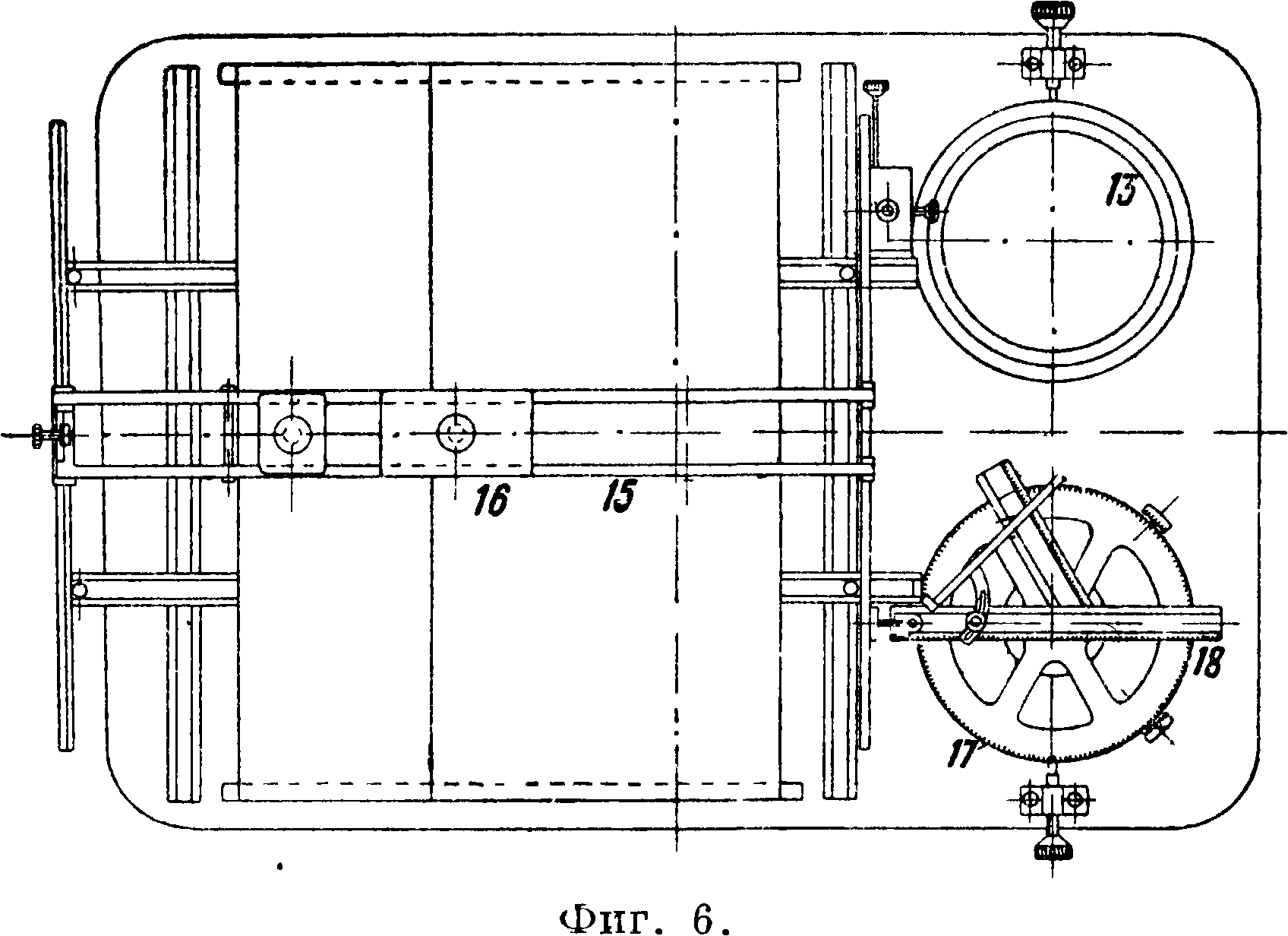
Надир-триангулятор Дробышева служит для развития Ф. графич. путем. Графич. надир-триангулятор (фигура 4, 5, 6) смонтирован
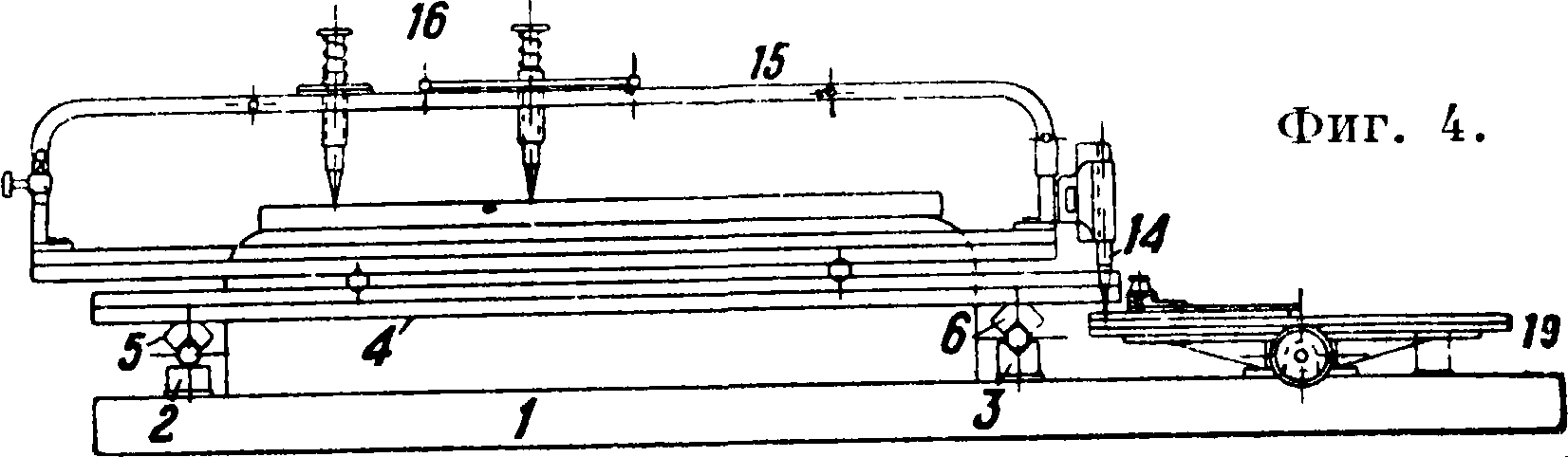
на столе 1, на к-ром прикреплены рельсы 2 и 3 (фигура 4). Для передачи движения верхней части надир-триангулятора в желобах рельсов имеется по два шарика. На шариках катается нижняя рама 4, состоящая из 4 желобчатых рельсов, из которых два 5 и 6 желобками обращены вниз (фигура 4), а два 7 и 8—вверх (фигура 5). На каждом из верхних двух желобчатых рельсов 7 и 8 рамы 4 находится по два шарика. На этих шариках катается верхняя рама 9, у которой имеется один желобчатый 10 и один простой 11 рельсы. Благодаря описанной конструкции достигнуто точное и легкое движение по двум направлениям верхней рамы 9, кроме того эта система дает возможность легко переносить точки, прочерчивать засечки, что необходимо при Ф. На верхней раме 9 имеется микроскоп 12, расположенный над стеклянным диском 13, имеющим движение вокруг вертикальной оси
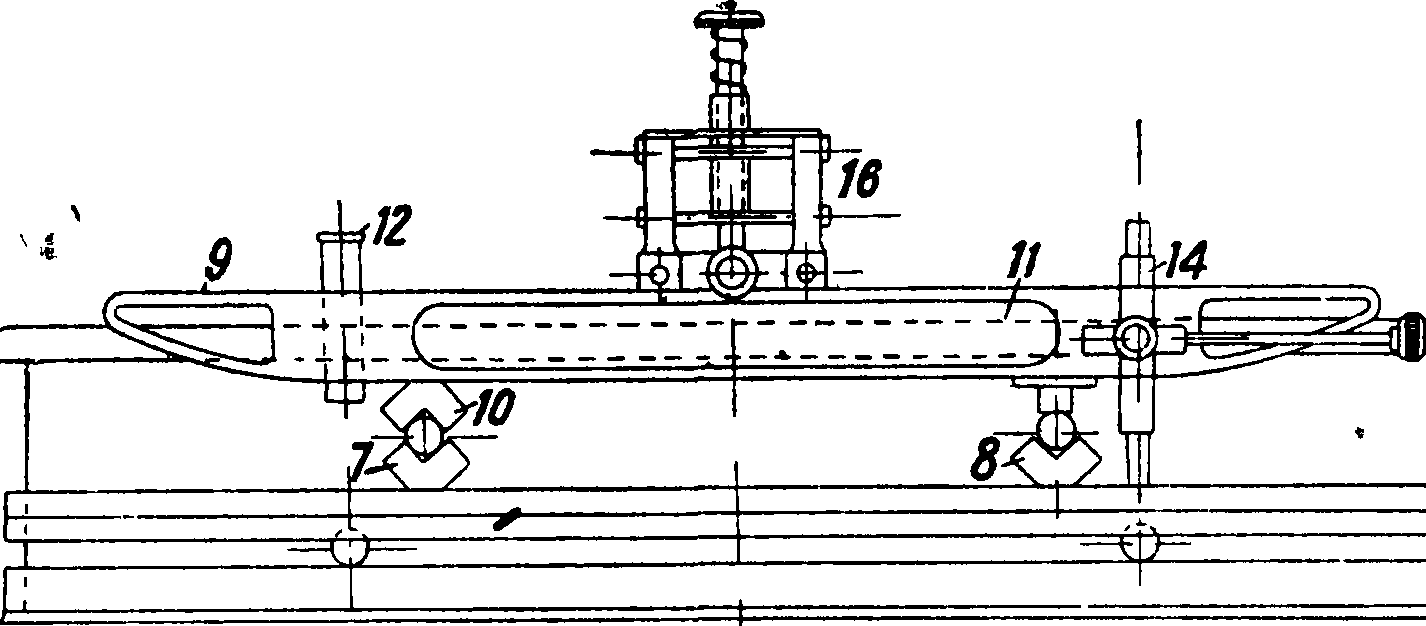
Фигура 5.
(фигура 6). Ведущий стержень 14 со сферич. концом и накладной штангой 15 с ползушкой 16 для установки иглы над выбранной точкой укреплен на диске 17, имеющем по краю градусные деления. Диск 17 имеет желобок 18, к-рый является направляющим и к-рый можно устанавливать вместе с лимбом на тот или иной угол. Ведущий стержень сферич. концом опущен в желобок 19 (фигура 4), чем и осуществлена связь верхней рамы с лимбом. При движении ведущего стержня по направляющей получаем движение всей системы: микроскопа и карандаша в любом направлении. Построение Ф. на надир-триангуляторе Дробышева сводится к построению засечек по имеющимся ориентировочным точкам и главным точкам негативов. Перед началом работ определяется эксцентриситет лимба с помощью микроскопа. Сама засечка осуществляется следующим образом. Положив стекло, покрытое специальной массой, на планшет, ставят ведущий стержень в центр лимба; микроскоп ползушки наводят на начальную точку, а негатив, по которому будут делаться засечки, центрируют надирной точкой на диске. После этого диск с негативом поворачивают до тех пор, пока линия надира не будет стоять в желаемом направлении. Сделав эту установку, прочерчивают на покрытом массой стекле линию, руководствуясь при этом выбранным масштабом. Повторяя описанные действия, получают ряд прочерченных направлений. Устанавливая второй негатив и ориентируя его, прочерчивают по нему направления на" те же точки. Пересечения направлений с первого и второго негативов дадут точки Ф. Для приведения полученной сети к определенному масштабу стекло вставляют в фоторедуктор (проекционный фонарь), проектирующий сеть в необходимом масштабе на экран с листом бумаги. На этом листе накалывается изображение всех вершин сети. Посредством надир-триангулятора Дробышева можно решать еще следующие задачи: 1) построение прямоугольных
координат, 2) построение полярных координат, 3) копирование в масштабе 1:1 и 4) копирование в дробных масштабах.
Способ калек дает графич. построение Ф. При этом способе кальки, снятые с отдельных снимков, тоже накладываются на общий лист бумаги или целлюлоида, но направления с калек на бумагу не перекалываются. Построение Ф. ведется при помощи лучей, проведенных на самих кальках. На общем же листе бумаги наносится лишь положение определенных этим способом точек. В этом случае Ф. ведется не в произвольном масштабе, а в масштабе основы. Для облегчения уравнивания и для повышения точности масштаб этой основы следует брать бблыним, примерно в 1 г/2—2 раза, масштаба трансформирования.При взаимном ориентировании калек, снятых со снимков, на которые приходятся два каких-нибудь опорных пункта, принятых за основание, необходимо несколько раз перекладывать их, пока не будет достигнуто точное совпадение пунктов на кальках с пунктами основы. Ориентирование же остальных калек идет уже обычным способом. После наложения всех калек и совмещения (не всегда точно) со всеми опорными пунктами необходимо передвинуть отдельные кальки так, чтобы опорные пункты на них точно совпали с опорными пунктами на основе и чтобы при этом возникающие в других местах тр-ки погрешностей имели наименьшую возможную величину. Центры тяжести тр-ков погрешностей принимаются за окончательное положение вершины фотограмметрии. сети. Для применения такого способа необходимо наличие: 1) хорошей прозрачной и недеформирующейся от влажности и тепла кальки и 2) монтажных столов со стеклянной крышкой и электрич. освещением снизу, причем во избежание сильного нагревания зеркального стекла и вместе с ним бумаги и калек (что влечет за собой расширение) под зеркальным стеклом на расстоянии 10—20 сантиметров должен быть еще одно стекло не зеркальное, покрытое папиросной бумагой. Способ калек особенно удобен в тех случаях, когда исполнена довольно большая наземная подготовка и без обеспечения остались только отдельные группы по 4—7 снимков, так что Ф. можно вести прямо в масштабе.
Аналогичный метод Ф. осуществляется при посредстве специальных приборов, называемых радиальными надир-триангуляторами (фигура 7)
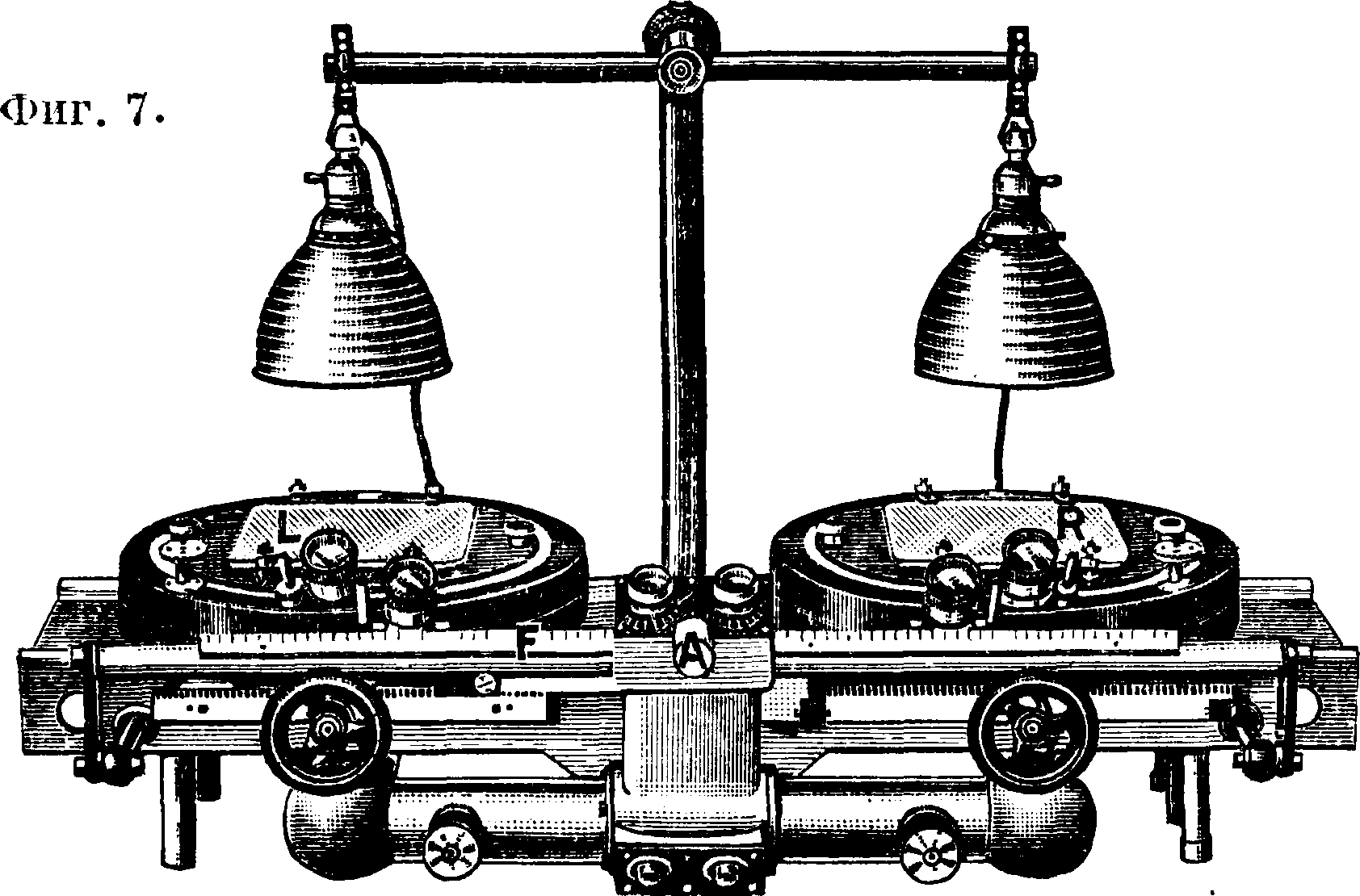
Цейсса. По своему принципу они одинаковы и отличаются только в деталях. Каждая пара соседних снимков маршрута укрепляется на вращающихся дисках L я R (фигура 7). Диски вместе со снимками могут перемещаться по направляющей F. Первоначальным положениям каждого центра вращения соответствует отсчет по измерительной метке стереомикррскопа А. Ориентирование снимков в первом приближении производится так: точку вращения снимка L приводят в оптич. совмещение с соответствующей измерительной меткой и затем перемещают и вращают снимок R до тех пор, пока точка местности снимка R, соответствующая центру вращения L, не покажется совмещенной с измерительной меткой R. Аналогичным образом ориентируют снимок на диске L. Ориентирование соответствует приближенному предварительному совмещению снимков вдоль прямой, направление которой определяют. Указанный метод позволяет наметить прямую между двумя соседними центрами вращения самым точным образом. Направление этой прямой отсчитывается с точностью до 16". Для определения направлений на дальнейшие точки рамка с одним из снимков снимается с диска и заменяется рамкой с другим соседним перекрывающимся снимком. Вспомогательный круг позволяет передвигать и вращать снимок в рамке так, чтобы выбранная точка совпала с центральной меткой, а Ha-
т. Э. т. XXV.
кая-нибудь другая выбранная точка снимка— с нулевой меткой рамки. Точность определения направлений на радиальном надир-триангуляторе Цейсса соответствует точности тригонометрии. сети V класса. В описании различных способов фототриангуляции, сделанном выше, намечена только схема работ для построения фототригонометрических сетей, соединение которых дает собственно сеть. На практике часто оказывается выгоднее строить сразу сеть для нескольких маршрутов, особенно когда последние перекрываются больше чем на 50%. В этом случае, если маршруты равны, основную сеть можно строить сразу для двух маршрутов и при этом из одних только главных точек. Возможны и другие варианты. Выбор того или иного из них обусловливается исключительно практич. целесообразностью. Особого упоминания заслуживает вопрос о наколке точек Ф. на негативах: ошибки, обусловливаемые неточной наколкой точек, могут превысить ошибки, обусловливаемые искажением углов; поэтому эту работу необходимо выполнять со всей возможной тщательностью, подвергая ее всегда контролю. В последнее время произведены попытки аналитич. уравнивания Ф., аналогично обыкновенной наземной триангуляции. В этом виде Ф. углы тр-ков измеряют по аэроснимкам с помощью специально устроенного диска и проекционного фонаря, а затем ведут обычные вычисления по уравниванию сети, несколько упрощенные. Такого рода аналитич. Ф. не может конечно заменить основную тригонометрии. сеть высших разрядов и пригодна только для обоснования съемок невысокой ТОЧНОСТИ В мелком масштабе. в Платон.
Лит.: см. Фототрансформатор.
Φ0Τ0Φ0ΡΕ3, увлечение световым потоком микроскопических или ультрамикроскопиче-ских частиц, взвешенных в разреженном пространстве. Явление наблюдалось Эренгафтом при освещении частиц интенсивным дуговым светом. Ф. на металлических частицах происходит в направлении светового потока и в основном объясняется световым давлением. На частицах из плохо проводящих веществ (сера, селен) Эренгафт наблюдал также отрицательный Ф. в направлении, противоположном распространению света. Как показали теоретич. расчеты Рубиновича и Эйнштейна, отрицательный Ф. может быть сведен к радиометрическому эффекту, объясняющемуся плохой теплопроводностью соответствующих частиц. Окончательно вопрос об отрицательном Ф. до сего времени еще не разрешен. с. Вавилов.