 > Техника, страница 92 > Часы
> Техника, страница 92 > Часы
Часы
Часы ., механизм, служащий для измерения времени и состоящий из регулятора, совершаю-щего периодич. колебания (маятника или баланса), и механизма для счета этих колебаний. Попытки применить для часового механизма иной вид движения, кроме колебательного, не увенчались успехом. В особых случаях, где нужна исключительная плавность хода, например для движущих механизмов астрономии, труб, применяется конический маятник, совершающий вращательное движение, или особого вида центробежный регулятор, но точность хода этих механизмов гораздо ниже, почему и применение их ограничено только специальными случаями. Ч. состоят из источника силы (часового двигателя), или завода, передаточного механизма в виде системы зубчатых колес, промежуточного механизма—х о-д а и регулятора—м а я т н и к а или бала γιο а. Назначение завода заключается в сообщении механизму (колесной системе) вращательного движения. Заводы м. б. гиревые, пружинные и электромагнитные. Назначение колесной системы заключается в преобразовании медленного вращения колеса заводного механизма—т. н. барабанного колес а—в быстрое вращение секундного или ходового колес (последние колеса системы). Передаточное число будет всегда больше единицы и колеблется от 900 до 4 000 в зависимости от рода и назначения Ч. Часовой ход (ёсйарре-ment) служит для преобразования вращатель-
ного движения последнего колеса (ходового) в колебательное движение регулятора и сообщения в то же время этому последнему регулярных импульсов для поддержания колебательного движения, к-рое в обычных условиях будет затухающим вследствие трения в подшипниках и о воздух. Назначение регулятора заключается fe периодическом, строго равномерном освобождении неподвижной колесной системы через равные промежутки времени для того, чтобы дать возможность колесам (и связанным с ними стрелкам Ч.) повернуться на угол, пропорциональный времени между двумя последовательными освобождениями. Ч., в которых регулятором служит маятник, нельзя переносить с одного места на другое, не нарушая их хода; такие Ч. являются неподвижными, или, как обыкновенно говорят, стенными. Ч. с балансом могут изменять свое положение относительно горизонта *без того, чтобы ход претерпел изменения. Такие Ч. в зависимости от размера, корпуса и выполнения м. б. стенными, каминными, карманными, браслетными и прочие Область применения балансовых Ч. гораздо шире, чем маятниковых, но точность маятниковых Ч. несравненно больше, т. к. они меньше подвержены влиянию различных факторов, искажающих нормальный ход Ч.
Каждый часовой механизм собран между двумя плоскими латунными пластинками — пластинами, скрепленными друг с другом посредством латунных же или стальных колонок. В платинах высверлен ряд отверстий, которые служат подшипниками для осей колесной системы. Колеса с числом зубцов до 20 называются трибкамии изготовляются из одного куска со своей осью; материалом обычно служит сталь. Колеса с числом зубцов больше 20 называются просто колесами, изготовляются из латуни и насаживаются на осй либо посред-
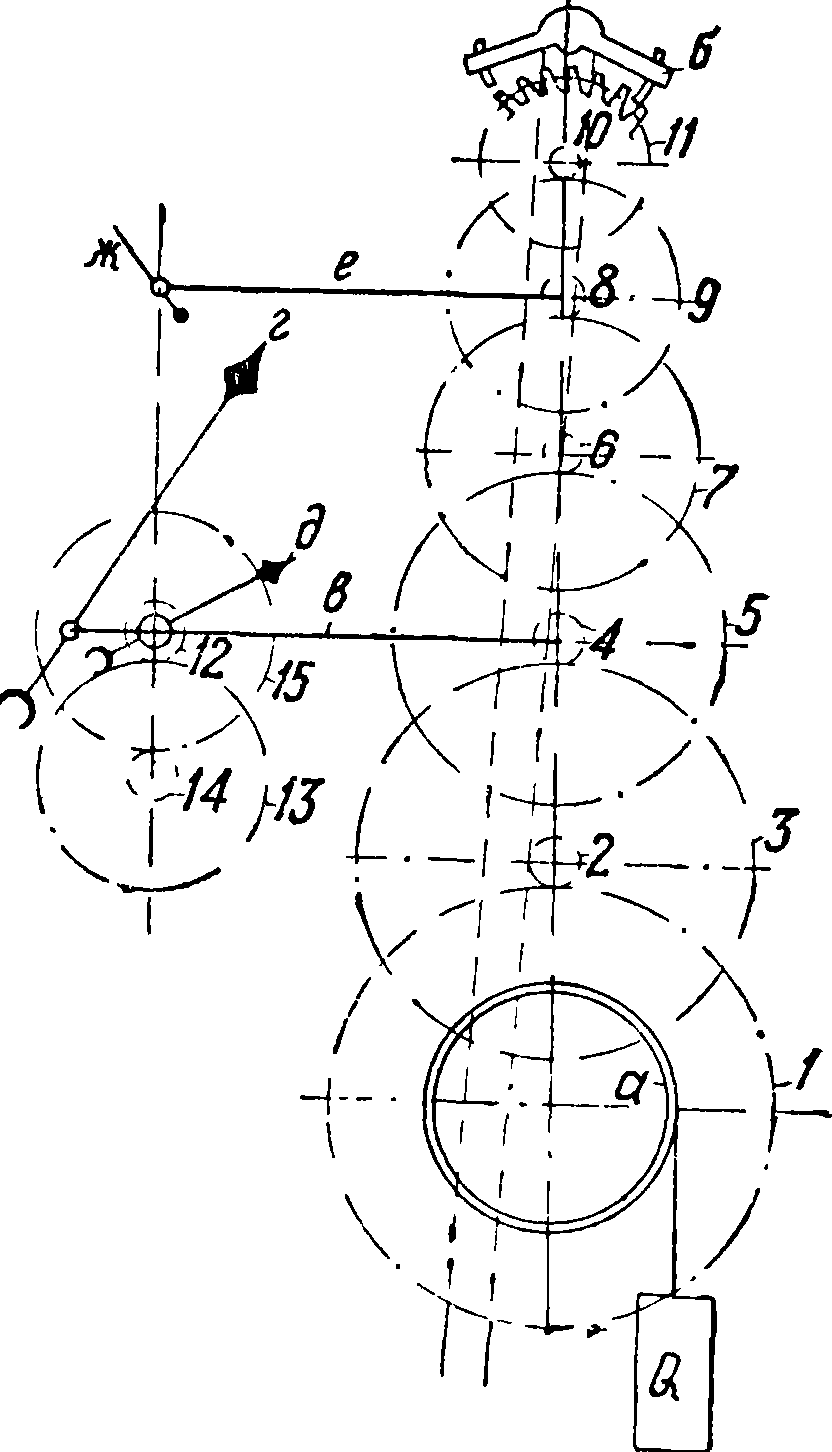
со работает с трибкой 6 промежуточного колеса 7, которое сцеплено с трибкой 8 с е-кундного колеса 9. В нек-рых видах Ч. промежуточное или секундное колесо может отсутствовать. Секундное колесо приводит в движение трибку 10 ходового ι
колеса 11, которое является |
частью хода, состоящего из ходового колеса 11 и скобки, или якоря б, соединенного с маятником или иным регулятором. На оси в среднего колеса насажена с трением втулка, несущая минутную стрелку г и минутную трибку 12, зацепляющуюся с век-1 сельным колесом 13, составляющим одно целое с вексельной трибкой 14, Последняя приводит в движение часовое колесо 15, насаженное вхолостую на втулку минутной триб-ки и несущее на своей полой оси часовую стрелку д. В карманных, а иногда и в столовых Ч. на оси секундного колеса е насажена секундная стрелка з/с.
Механизм конструируется обыкновенно так, чтобы числа зубцов колес и трибок, а также модуль или шаг зубчатых колес уменьшались от барабанного колеса к ходовому. Наибольшее передаточное число при одной паре колес (то есть колесо и трибка) не превышает обыкновенно 15, например для трибки с наименьшим числом зубцов 6 наибольшее число зубцов колеса будет 90. При передаточных числах больше 15 берут две и больше пар колес. В табл. 1 указаны числа
Фигура 1.
Таблица 1. — Числа зубцов колес часовых механизмов различных типов.
| Род часов | Бараб. колесо | Трибка добав. колеса | Добав. колесо | Трибка среди. колеса | Среди. колесо | Трибка проме-
шут. колеса |
Про меж. колесо | Трибка секун дного колеса | Секу ндн. колесо | Трибка ходов. колеса | Ходов·
колесо |
Продолжите льн. завода |
| 1 Стенные с секундным | 1 | 1 | ! | 1 | 8 d | |||||||
| маятником. | 150 | — | — | 10 | 80 | 10 | 90 | — | 12 | 30 | ||
| То же. | 192 | — | _ | 14 | 112 | 14 | 105 | — | _ | 14 | 30 | Sd |
| Каминные. | 1*0 | 12 | 56 | 8 | 84 | 7 | 70 | — | — | 7 | 41 | Ud |
| Морской хронометр | 90 | — | _ | 14 | 96 | 12 | 75 | 10 | 80 | 10 | 15 | ъФ |
| Америк, будильник | 48 | — | _ | 8 | 56 | 7 | 45 | 6 | 50 | 6 | 15 | 3 Ф |
| Карманные. | 80 | — | — | 10 | 67 | 8 | 60 | 8 | 70 | 7 | 15 | зФ |
| Тоше. | 96 | — | _ | 12 | 80 | 10 | 75 | 10 | 80 | 8 | 15 | зФ |
| ; Автомобильные. | 90
1 |
12
! |
64 | 10
i |
80
1 |
10 | 60 | 8 | 70 | 7 | 15 | 8 d |
| 1
1 |
Бараб. колесо | Трибка 1-го добав очн. колеса | Первое добав. колесо | Трибка 2-го до-бавочн. колеса | Второе добав. колесо | Трибка S-го добав очн. колеса | Третье добав. колесо | Трибка среди. колеса | Среди. колесо | Трибка ходов. колеса | Ходов. колесо | Про-ДО лжительн. завода |
| Годовые. | 90 | 12 | 84 | 12 | 60 | 10 | 48 | 8 | 96 | 8 | 20 | 394й, |
ством специальной втулки—ф утора либо заклепываются на специальную заточку в триб-ке. Фигура 1 изображает схему колесной системы Ч. в самом общем случае. Груз Q действует на барабан а, сидящий на оси барабанного колеса 1. Это колесо сцеплено с трибкой 2 добавочного колеса 3, к-рое в свою очередь находится в зацеплении с трибкой 4 среднего (минутного) колеса 5. В Ч. с гиревым заводом, и в карманных добавочное колесо отсутствует, но в Ч. с очень большой продолжительностью хода добавочных колес м. б. два и даже три, например годовые Ч. Среднее коле-
зубцов наиболее характерных типов часовых механизмов. Для стенных Ч. с гиревым заводом, которые заводятся вправо, а барабан которых при ходе Ч. вращается влево, избегают обыкновенно применять добавочное колесо, ибо в случае наличия одного добавочного колеса либо заводить нужно влево, что неудобно, либо минутная стрелка будет двигаться влево, что недопустимо. В стенных Ч. такого рода (№ 1 и 2 табл. 1) отсутствует секундное колесо и его функции выполняются ходовым колесом, число зубцов которого подобрано так, чтобы оно делало 1 об/мин. В каминных Ч. №3 секундное колесо также отсутствует, т. к. эти Ч. не имеют секундной стрелки. В карманных часах (№ 6 и № 7) направление завода можно сделать произвольным благодаря наличию особого заводного (ремонтуарного) механизма. Из всей таблицы только автомобильные часы (крупный карманный механизм) имеют все колеса, приведенные на фигуре 1. Наличие добавочного колеса в них объясняется восьмидневной продолжительностью завода. Совершенно особняком стоят годовые часы (№ 9), которые имеют три добавочных колеса, но зато лишены промежуточного и секундного колес, что объясняется большим периодом колебания маятника этих часов (15") и отсутствием секундной стрелки. Плавность хода зубчатых зацеплений определяется, как известно, числом зубцов, одновременно находящихся в зацеплении; поэтому очевидно, что пары с большим числом зубцов дадут большую плавность передачи. Но, с другой стороны, колеса с меньшим числом зубцов стоят дешевле и более выгодны в производственном отношении. Качество часового механизма в значительной мере обусловливается числом зубцов применяемых для передачи колес и в особенности трибок. Чем лучше часы, тем большее число зубцов имеют трибки. Так, 6-п 7-зубые трибки употребляются только в самых дешевых Ч., в Ч. высшего качества наименьшее число зубцов трибки—10 и только для ходовой трибки берут иногда 8 зубцов. Отсюда следует, что механизмы № 2 и № 7 по табл. 1 представляют собою лучший фабрикат, чем соответственно № 1 и 6. В морском хронометре (№ 4), часах наивысшей точности из всех Ч. с балансовым ходом, нет трибок с числом зубцов меньше 10. Таблица 1 дает только наиболее характерные передачи часовых механизмов, не исчерпывает всех возможных сочетаний колес и не претендует на полноту данных.
Для того чтобы часовой механизм мог показывать кроме минут еще и часы, необходимо расширить его измерительный предел при помощи отдельного т. н. стрелочного механизма. На фигуре 2 изображен схематич. разрез этого механизма. Минутная, или средняя,ось а пропущена сквозь отверстие в передней платине Ч. б, и на выступающий конец ее насажена пружинная втулка в с трибкой 12 на конце втулки, обращенном к платине. Эта трибка сцеплена с вексельным колесом 13,к-рое вместе с закрепленной на нем в ексель-н о и т р и б к о и 14: свободно вращается на штифте г, укрепленном на резьбе в платине. Вексельная трибка сцеплена с часовым колесом 15, втулка которого сидит свободно на пружинной втулке в и вместе с ней и минутной осью проходит через отверстие в циферблате часов д. Минутная стрелка е насажена на квадратный конец втулки в, а часовая стрелка ж посредством круглого футора укреплена на втулке часового колеса. Числа зубцов трибки пружинной втулки, вексельного колеса, вексельной трибки и часового колеса подобраны так, чтобы часовая стрелка вращалась в 12 или 24 раза медленнее минутной. Если вращать от руки минутную стрелку, то пружинная втулка в будет с нек-рым трением проворачиваться на оси а и будет через вексельное колесо и трибку передвигать часовое колесо и часовую
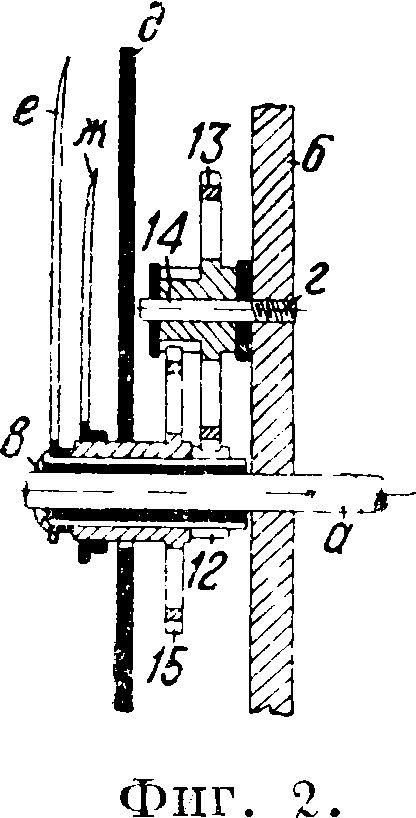
стрелку независимо от движения остального часового механизма. Т. о. имеется возможность переставлять стрелки и устанавливать Ч. на любое время. Гиревой завод состоит из гири а (фигура За), соединенной с тяговым органом струной б или цепочкой в, передающими силу веса гири на бара-
0
V
X
Фигура За.
бан г, снабженный винтовой канавкой для струны, или на зубчатое колесо д, захватывающее своими зубнами звенья цепи. Последняя конструкция применяется преимущественно в дешевых Ч. (шварцвальдские часы, или т. н. ходики). Преимуществом гиревого завода является постоянство движущей силы как в начале, так и в конце завода.
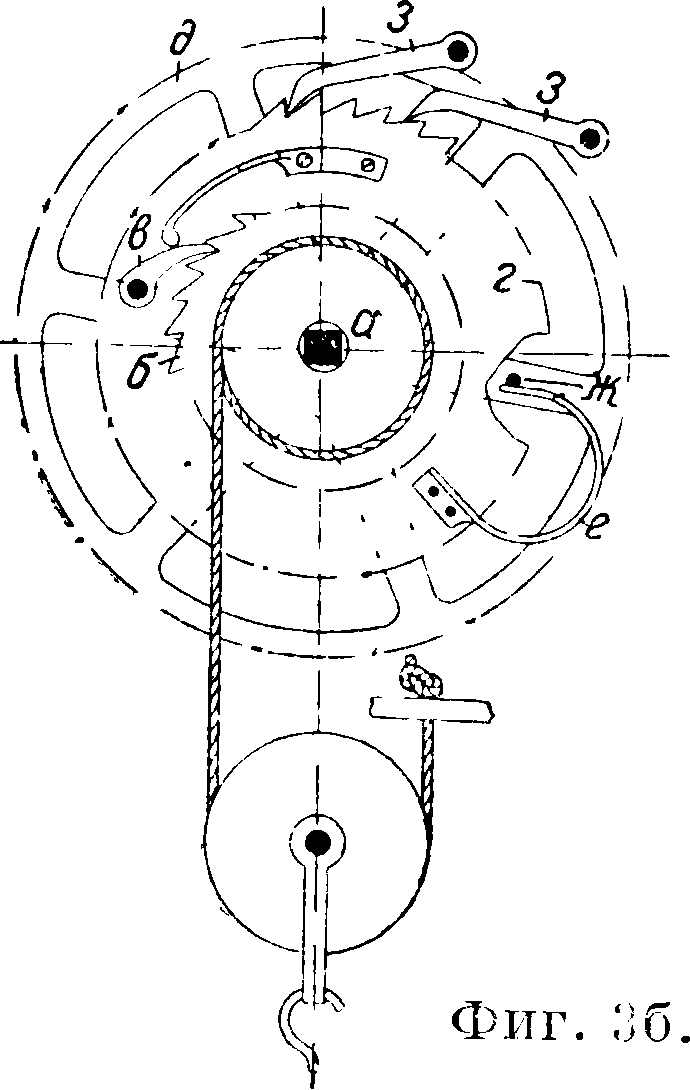
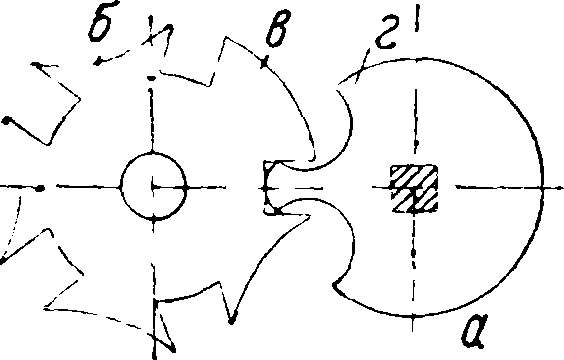
Существенным недостатком обыкновенного гиревого завода со шнурком или струною является то обстоятельство, что Ч. во время завода лишены двигательной силы и потому могут остановиться, т. к. при заводе барабан для наматывания струны движется вправо, а при ходе Ч. струна разматывается, вращая барабан влево. Для устранения этого недостатка служит вспомогательный завод (фигура 36). На оси а барабана укреплены неподвижно малое храповое колесо б и сам барабан; зубцы малого храпового колеса упираются в собачку в, укрепленную на большом храповом колесе г, сидящем свободно на оси а. Колесо г связано с барабанным- колесом д посредством пружины е, упирающейся в штифт ж. При ходе Ч. малое храповое колесо толкает собачку в и связанное с ней большое храповое колесо г, а последнее посредством пружины е (к-рая при этом изогнется) передает движение барабанному колесу, заставляя работать механизм. При заводе собачка в свободно пропустит зубцы малого колеса, к-рое будет вместе с барабаном вращаться вправо; колесо г будет при этом стоять на месте, т. к. вращаться вправо ему не дает одна из собачек з. Т. о. колесо д будет попрежнему вращаться влево под действием разгибающейся пружины е, которая и будет в течение завода служить источником энергии. После того как по окончании завода ключ будет снят с квадрата валика а, натяжение гири снова сожмет пружину е и таким образом вернет ей израсходованную при заводе энергию.
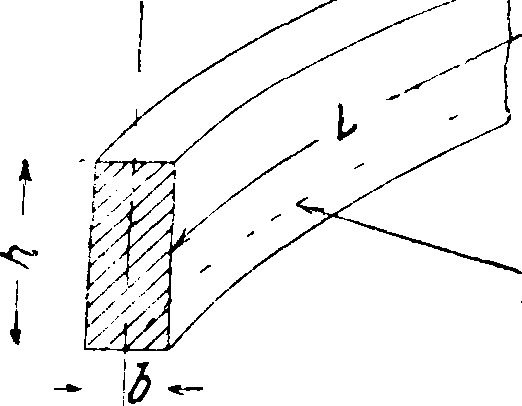
В качестве источника силы для часовых заводов очень часто применяется пружина. Из всех видов пружин почти исключительно применяется спиральная плоская пружина, заключенная для удобства в барабан, сидящий на одной оси с барабанным колесом. В Ч. дешевого выполнения пружина иногда работает и без барабана, например в будильниках. Основным выражением для изгибающего момента пружины является формула Сен-Венана, измененная Филипсом:
Μ-ΕΙ(ί-έ). «
26
Т. Э. m. XXV.
где Μ—изгибающий момент, Е—модуль упругости, I—момент инерции поперечного сечения относительно оси ϊΧ, проходящей через ц. т. сечения и перпендикулярной к плоскости пружины, ρ0 и ρ—радиусы кривизны ее до и после деформации (фигура 4). Обозначая через Ь толщину, через h ширину и через L длину пружины, после ряда преобразований имеем
Μ=EI ·
Eb3ha
“Ϊ2ΖΓ ’
(2)
где а—угол, на который закручена пружина. Радиус * кривизны деформированной пружины йайдется из. выражения
Q
_
(3)
Из выражения (2) следует, что момент пружины прямо пропорционален углу закручивания пружины (в радианах),
IY ^ модулю упругости мате-
^ Ν риала пружины (г/лш2),
кубу толщины пружины (лш5), ширине пружины • (лш) и обратно пропор-ционален длине ее (ммГ1). Выражение (3) показыва-; ет, как изменяется ради-
I ус пружины при закру-
ФИГ. 4. чивании ее на определен ный угол а. В барабане пружине приходится работать в условиях, несколько отличных от только что разобранных.
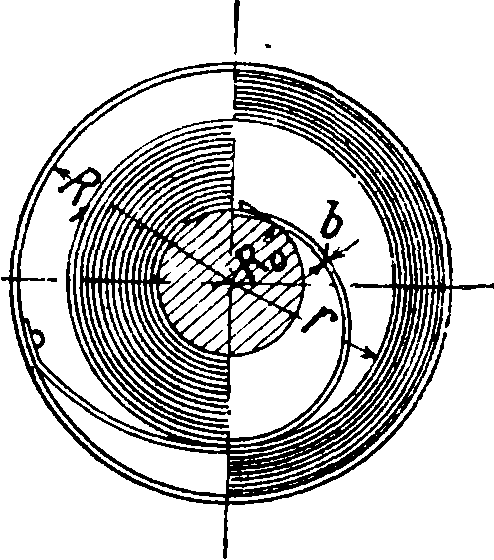
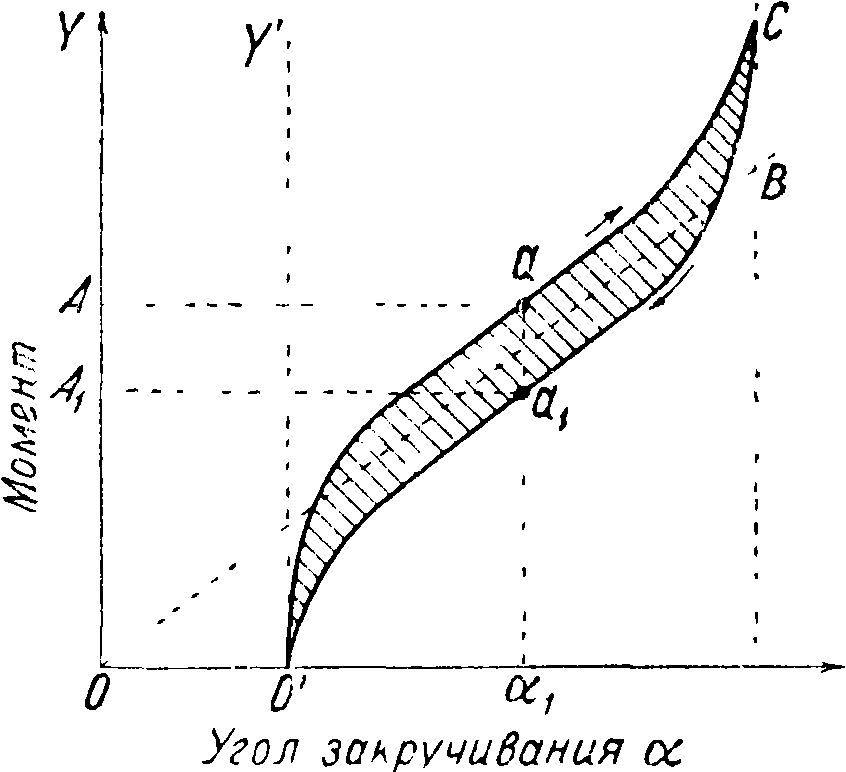
На фигуре 5 представлен барабан в разрезе, причем в правой половине его изображена спущенная пружина, а в левой—заведенная. Спущенная пружина всеми своими витками, за исключением внутреннего, плотно прижимается к внутренней стенке барабана, создавая т. о. трение между витками. Заведенная пружина плотно навернута на валик, и витки ее плотно прижаты друг к другу, что также обусловливает известное трение между витками, сказывающееся, как в первом случае, на работе пружины. Если изгибающий момент для случая свободной пружины м. б. изображен прямою ОБ в системе координат ΧΟΥ (фигура 6), то для пружины в барабане он изобразится стручкообразной кривой ОаСагО в системе ХОУ.
Кривая эта будет иметь две ветви, восходящую ОаС и нисходящую Cafix, несовпадающие между собой благодаря наличию молекулярного трения; площадь, ограниченная кривой, будет равна в выбранном масштабе работе при заводе, бесполезно затраченной на преодоление молекуляр- фИг. 5. но го трения в материале пружины. При заводе момент будет изменяться по восходящей ветви, а при спуске по нисходящей. Средний участок кривыхОаСиО^Св достаточной степени приближается к прямой, а крайние участки резко изогнуты благодаря трению между витками в начале и конце завода. Величина Oai, измеренная в масштабе углов закручивания, будет изображать собою тот угол, на к-рый нужно повернуться барабану до полного спуска пружины, а величина 00, измеренная в том же масштабе, изображает тот угол, на к-рый пришлось закрутить пружину для того, чтобы вложить ее в барабан.При одном и том же угле закрутки а1 величина моментов будет О А или 0АХ) смотря по тому, в период завода или
спуска этот угол измерен. Величина ААХ характеризует собою упругое последействие в пружине, и чем пружина лучше, тем оно меньше. При расчете момента угол приходится считать не от точки О, а от точки О. то есть от свободного состояния пружины (вне барабана). В действительности ветви стручкообразной кривой не так гладки и плавны, как на фигуре 6, благодаря трению между витками, сгустившемуся маслу и неровностям и шероховатостям клинка пружины. Для ослабления этого клинок должен быть совершенно гладким, ровным, без штрихов и ржавчины, а масло для смазки должно быть самого высшего качества, незагустевающее и абсолютно нейтральное, без всяких следов кислоты или каких-либо других примесей, вредно действующих на металл.
Что касается геометрия, размеров пружины, гл. обр. ее толщины b и длины L (т. к. ширина повлияет только на высоту барабана), то здесь должен быть соблюдены два условия. Первое из них формулируется так: толщина пружины в барабане должен быть не больше х/зо диаметра 2R0 валика (фигура 5), т. н. федеркерн а. Это условие продиктовано соображениями прочности клинка пружины для того, чтобы при наматывании на валик при заводе у внутренних витков не получалось опасных перенапряжений во внешних волокнах пружины. Второе условие: чтобы барабан дал наибольшее возможное число оборотов после полного завода, необходимо, чтобы пружина занимала ровно половину свободного пространства внутри барабана, то есть чтобы внутренний радиус спущенной пружины равнялся внешнему радиусу заведенной пружины. Если обозначить радиус внутренней стенки барабана через Rl9радиус валика через R0 и внутренний радиус спущенной пружины, равный внешнему радиусу заведенной пружины, через г, то
Фигура 6.
1 + щ,
2
(4>
В практич. условиях обычно берут =
тогда r=2,236 R0=0,745 Обозначая через п"—число витков заведенной пружины, через п—число витков спущенной пружины и через п=п"—п—число полезных оборотов барабана, мы имеем:
п"b — 1,236 R0=0,412 Rl
____0,764 R0 =Д),255 R1 (5)
nb=(η" - п)b=0,472 R0=0,157 R^
Это выражение дает возможность по заданным радиусу барабана и толщине пружины определить число оборотов, к-рое сделает барабан при работе на часовой механизм. В обычных условиях (карманные Ч.) берут п=обо ротов. Длина ^пружины L=1,745πη,Ε1 + 2πΛ0, причем второй член предусматривает внутренний виток, плотно облегающий валик с отверстием для надевания на крючок валика. Как видно из ф-лы (2), а также из фигура 6, момент, передаваемый барабаном механизму, не будет постоянным, и хотя большинство современных ходов работает одинаково хорошо и с меняющимся моментом, но все же в условиях наибольшей точности желательно располагать строго постоянным моментом, подобным тому, какой дает гиревой завод.
Если на барабан а (фигура 7) с пружиной намотать шнурок или цепь к и этот шнурок другим концом укрепить на шкиве б переменного радиуса, так называемым улитке, с таким расчетом, чтобы, когда пружина заведена полностью, шнурок действовал на наименьший радиус шкива, и наоборот, при почти спущенном заводе—на наибольший его радиус, то закон изменения радиуса шкива м. б. подобран так, что момент на оси его будет постоянным. Приспособление это (довольно дорогое и трудно поддающееся регулировке при замене пружины) употребляется в настоящее время исключительно в морских
Фигура 7.
хронометрах.
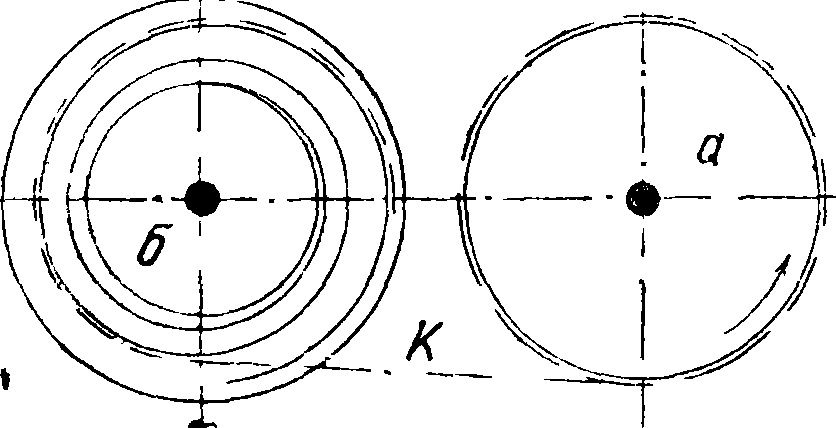
В хороших Ч. на барабане ставят остано-в ы, наиболее распространенный тип к-рых, т. н. мальтийский крест, дан на фигуре 8. Этот механизм служит для ограничения числа оборотов валика по отношению к барабану. Диск а с пальцем насаживается на квадрат валика, а звездочка б укрепляется свободно на дне барабана. При вращении палец диска а входит по очереди во все впадины звездочки до тех пор, пока выпуклое крылышко в не упрется в боковой выступ г диска с пальцем. Дальнейшее движение невозможно. Остановом можно ограничить кривую моментов, используя лишь ее прямую часть и одновременно предохраняя пружину от обрыва при форсированном заводе.
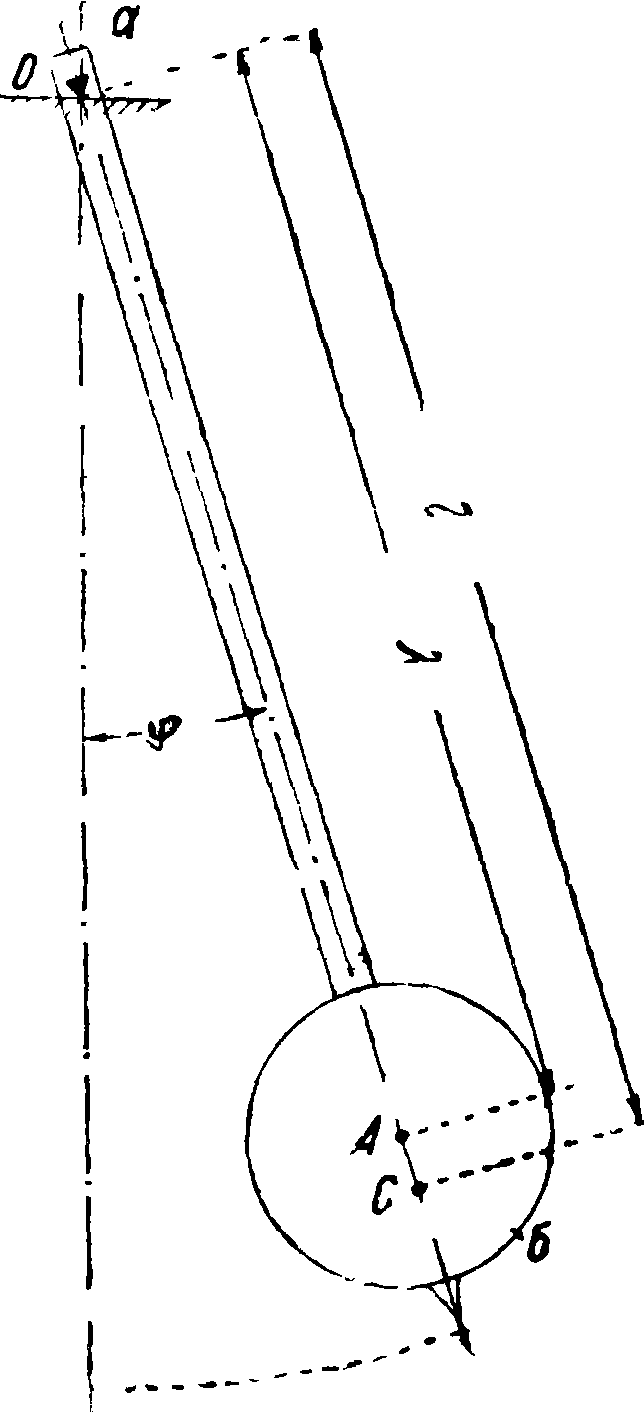
В качестве регулятора для Ч. употребляют маятник и баланс. Маятником в часовом деле называется жесткий стержень (фигура 9), снабженный подвесом а на своем верхнем конце и тяжелой чечевицей б (линзой) на нижнем конце. Он может свободно вращаться вокруг точки О и, будучи предоставлен сам себе, занимает отвесное положение. Обозначим вес маятника через Р и расстояние ц. т. А от оси О подвеса через Я. Тогда момент, возвращающий его в
Фигура 8.
Фигура 9.
положение равновесия, будет ΡλΑηψ. Обозначая РЯ (статич. момент) через К н момент инерции маятника относительно точки О через I, получим ур-ие движения маятника в следующем виде:
I~^ + Ksm<p=0. (6)
Если <р мало, то можно положить sin φ=φ и ур-ие (6) примет вид:
т d4> 1 di 2
Κφ=О,
I общий интеграл которого будет иметь вид
φ=Ф sin (cot — α), (7)
где Φ—амплитуда, а—начальная фаза. Движение будет колебательным, причем период его да
Период в этом случае от амплитуды не зависит, колебания будут изохронны, то есть продолжительность периода будет одна и та же при больших и малых амплитудах. Это свойство регулятора называется изохронизмом. При амплитудах и углах отклонения, значительно отличающихся от нуля, формула (6а) неприменима, и выражение для периода получит более сложный вид, чем тот, к-рый ему дает выражение (8). В результате первого интегрирования ур-ия (6) имеем:
1 (^γ)2=2 К (cos ψ - cos Φ)
и
VKjdt:
sin2 -
: -sin2 ~
Заменяем переменную, полагая
sm -=sin - sin y>,
и в результате соответствующих преобразований приходим к выражению для периода с эл-липтич. интегралом первого рода:

Разлагая в ряд подинтегральное выражение и производя интегрирование, получим:
Т-2,-,С? [*+ί»»! +
+ (Η)·“·ί + (Η^)·»»·ί+.]- (.0)
Это и есть точная формула периода колебания фи-зич. маятника. Для практич. целей ее немного φ ф _
упрощают, полагая sm —=— ,что в обыкновенных условиях допустимо; сохраняя три первых члена ряда и выражая Ф в градусах, имеем:
Τ=2π У А1 + 5^20 + 1 22^2 000]· Ф)
Разница периодов по формуле (8) и только что выведенной будет зависеть от амплитуды; полагая в выражении (11) Ф=0, мы получим выражение (8). Таблица 2 дает разницу периодов для употребляемых в практике точной хронометрии значений Ф в миллионных долях периода и в ск. в сутки (суточный ход).
Как видно из табл. 2, отставание Ч. с маятником увеличивается с амплитудой сначала мед-, ленно, а затем быстрее, причем для 6° доходит до минуты в сутки. Резюмируя все сказанное о маятнике, приходим к выводу, что колебания маятника неизохронны для любых амплитуд; при малых амплитудах порядка 1°—1°30, какие обыкновенно употребляются в астрономия. Ч., период мало изменяется с амплитудой, и колебания можно считать практически изохронными. Математич. маятник, колеблющийся синхронно с физическим, будет иметь длину I и период его при малых амплитудах будет
Τ=2π]/Ι·
(6а)
(12)
*26
Таблица 2. — Р а з н и ц а периодов для различных значений Ф.
| !
Амплитуда Ф |
80 | 1
40 |
50 | 1° | 1°10 | 1°20 | i°30|
_____1 |
| Разница периодов * | 4,76 | 8,45 | 1
13,2 |
19, С5 | 25,9 ; | 33,9 | 42,9 |
| Отставание, ск. в сутки | 0,412 | 0,73 | 1,14 | 1,65 | 1
2,24 j i |
2,93 | !
3,71 1 |
| Амплитуда Ф | 1°40 | 1 1°50 | 2° | 3°
1 |
*· !
j |
5° | 6° |
| Разница периодов * | I
1 52,9 |
6 4,1 | 76 | 171
1 |
304 | 473 | j 1
685 i |
| Отставание, ск. в сутки | 1 4,56 | 5,54 | 6,59 1
I |
14,80
J |
i
26,35 ! |
41,15 | 59,18 |
|
* В миллионных долях. | |||||||
Сравнивая выражения (8) и (12), имеем
1 _ 7 7 ^ д~ К~ М ?д ’
откуда
I
Μλ
(13)
где М —масса физического маятника Мд=Р, то есть-^ играет в физич. маятнике роль длины его; эта величина называется эквивалент-нойдлинойфизическогомаятника. Момент инерции I взят относительно точки О; если момент инерции взять относительно ц. т. А маятника, то на основании свойств момента .инерции можно написать: I=1А Μλ2; тогда
I — λ -f*
IA Μ λ ’
(14)
τ. е. эквивалентная длина физич. маятника больше расстояния от ц. т. до оси подвеса
(фигура 9) на величину. Точка С, которая лежит на расстоянии I от точки подвеса О и на расстоянии от ц. т., называется центром качания и обладает тем свойством, что если в нее поместить точку подвеса вместо О, то период маятника не изменится (теорема Катера). Логарифмируя и диференцируя выражение (12) для одной и той же точки земной поверхности (д=Const), получим:
Это выражение дает возможность рассчитать, на сколько нужно при регулировке маятника поднять или опустить линзу, чтобы получить желаемый суточный ход. Обозначая его "в ск. через Av (Avance) и принимая во внимание, что в сутках 86 400 ск., легко видеть, что
dT _ Αν _ 1 dl 4 Τ ~ 86 400 ~ 2 I 9
откуда у=23,1 · ΙΟ"6 Αν. (16)
Τ. к. линза опирается на гайку, навинченную на нижний конец стержня маятника, то, завинчивая и отвинчивая эту гайку, при известном шаге винта можно всегда отрегулировать маятник. Более тонкая регулировка производится путем накладывания дополнительных грузов на площадку, помещенную в средней части стерж ня маятника на расстоянии - от подвеса. Величина добавочного груза определяется из ф-лы
V=- Р 1 10800
Αν,
(17)
где р—вес добавочного груза и Т—вес маятника. Изохронизация маятника, то есть сообщение ему изохронизма при любых амплитудах при помощи искусственных приемов, не привилась на практике. Изохронизм в значительной мере достигается путем подвеса маятника на пружине (фигура 10), на так называемым пен-дельфедере, к-рый состоит из двух плоских пружин, зажатых по концам между двумя парами латунных или же стальных колодок. Добавочный момент, создаваемый пружинами, в значительной мере компенсирует член, нарушающий изохронизм в уравнении движения (6), которое, если разложить sin φ в ряд и ограничиться двумя первыми членами, примет следующий вид:
т ά2φ. Κφζ Λ -,
+=°-J
Фигура 10.
Ур-ие это отличается от ур-ия (6а) третьим чле-ном в левой части: I---к-рыи и нарушает изохронизм. Пендельфедер создает добавочный момент, хотя и несколько иной формы, но все же частично исправляющий неизохронность маятника. При подвесе на пендельфедере ось вращения маятника лежит приблизительно на одну треть длины пружины, считая от края верхней оправы.
Период маятника будет изменяться с окружающей ί°,β если он не компенсирован на i т. к. длина стержня будет меняться при колебаниях t°. Отсюда ясно, что маятник, изготовлен- -ный целиком из одного и того же металла, компенсировать на t° нельзя. В более дешевых современных конструкциях часто делают стержень из" пропитанного лаком и смолами дерева для того, чтобы сделать его невосприимчивым к влажности воздуха. Коэф. расширения дерева очень мал, и маятник мало чувствителен к изменениям t°. Одна из наиболее совершенных конструкций принадлежит Рифлеру(фигура 11), где стержень маятника а изготовлен из инвара (коэф. расширения 0,8—
1 μ/м °С), а компенсационная трубка б, длина которой составляет примерно ν1Ί длины маятника, сделана из металла (одного или двух для удобства подбора коэф-та расширения) с большим коэф-том расширения. При повышении t° длина стержня а увеличится, и гайка в с контргайкой г опустится. Но в то же время трубка б увеличит свою длину настолько, насколько удлинился стержень. Т. о. расстояние ц. т. линзы д от оси подвеса останется неизменным. Т. к. Р-ный коэф. инвара изменяется и от состава его (содержание Ni) и от термин, обработки, то трубки б приходится подбирать индивидуально к каждому маятнику. Трубка эта состоит из двух металлов (например Fe и Си), причем длины обоих металлов м. б. различны; если больше меди, то коэф. расширения а будет приближаться к
Фигура и.
17-КГ6, а если больше железа, то к 11-КГ6. В крайнем случае можно применить и А1 (α==22-КГ6). Коэф. расширения а трубки из двух металлов м. б. вычислен по ф-ле
__ «Κι +«2^2
Й + ^2 1
где 1Х и 12 — длина каждой трубки. Маятники этого рода гарантируют точность хода до +0,005 ск. в сутки на 1° С. В более дешевом исполнении (2-й класс) гарантируемая точность +0,02 ск. в сутки на 1° С. В некоторых других конструкциях стержень делают из плавленого кварца (Сатори), к-рый имеет еще меньший коэф л расширения (а=0,4-10_о). Существенным недостатком компенсации, сосредоточенной в одном месте стержня, является то обстоятельство, что компенсация эта не учитывает т. н. расслоения ί°, то есть разности t° вверху и внизу футляра Ч., благодаря большей легкости теплого воздуха. В последних конструкциях Риф-леровского маятника предусмотрено 2 компенсационных приспособления, из которых одно расположено под линзой, а другое на 10 сантиметров выше середины маятника. Учет трения о воздух или иную сопротивляющуюся среду, в которой колеблется маятник, для малых амплитуд приводит к решению диференциального ур-ия т d2<p
1 dT»‘
FE.
dt
Κφ=0,
Av=43 200b2=10 800
κι
(18)
гдеF—коэф. при угловой скорости в первой степени, характеризующий вид движения и зависящий от молекулярного строения той среды, в которой колеблется маятник. Движение будет колебательным, как показывает исследование этого ур-ия только в том случае, когда F2 < 4KI, в противном случае оно будет
_ ^ F2 у апериодическое. Оиозиачая через о2,
а через Ф0 начальную амплитуду при периодич. движении, общий интеграл ур-ия (18) найдем в виде:
φ=Ф0е~ъы sin (со J/l — b2)t, (19)
из которого видно, что амплитуда (Ф0е~b(обудет непрерывно убывать и что движение будет периодическое затухающее. Период колебания будет:
гр __ + То То
1 ω УТ-ь* VГ-W ~ i Г F* ’
V 4 KI
Из этого выражения следует, что период затухающих колебаний Тг будет больше, чем период свободных незатухающих колебаний Т0; кроме того если F2 > 4KI, то Т1 будет мнимым, то есть колебаний вообще не будет. Суточный ход часов с маятником в сопротивляющейся среде по сравнению со свободным маятником будет:
F2
Отсюда следует, что влияние сопротивляющейся среды на период и на суточный ход будет тем меньше, чем тяжелее маятник и чем больше момент инерции его. Натуральный логарифм отношения двух последовательных амплитуд по их абсолютной величине есть т. н. логарифмич. декремент затухания и равняется:
_ _ tcF
^ ИНД 2 Y*KI-F*
Для обыкновенного Рифлеровского маятника весом 7,35 килограмм и Т0=2s было найдено: Δ== 6 х КГ6 и F= 6,56 х 1(Г6, а также суточный ход в воздухе по сравнению с суточным ходом в пустоте Αν - 1,5ο х КГ7 ск.
Рифлер произвел ряд опытов для определения влияния сопротивления воздуха на ход точных Ч., подойдя к вопросу чисто практически. Он нашел, что для каждого маятника м. б. определена барометрич. константа, то есть суточный ход, отвечающий изменению давления на 1 миллиметров Hg столба. Для своих маятников с двоякоконусной и цилиндрич. формой линз и весом в 7Д5 и 7,00 килограмм он нашел барометрич. константы 0,012 и 0,018 ск/сутки на 1 миллиметров Hg столба. Чтобы исключить влияние сопротивления среды, особо точные Ч. заключают в воздухонепроницаемые футляры и либо немного (Рифлер) либо довольно сильно (Шорт) разрежают воздух в них. Возможны и иные методы разрешения этой задачи в смысле снабжения маятника особыми компенсирующими барометрич. приспособлениями, которые также б. или м. удачно справляются с возложенной на них задачей.
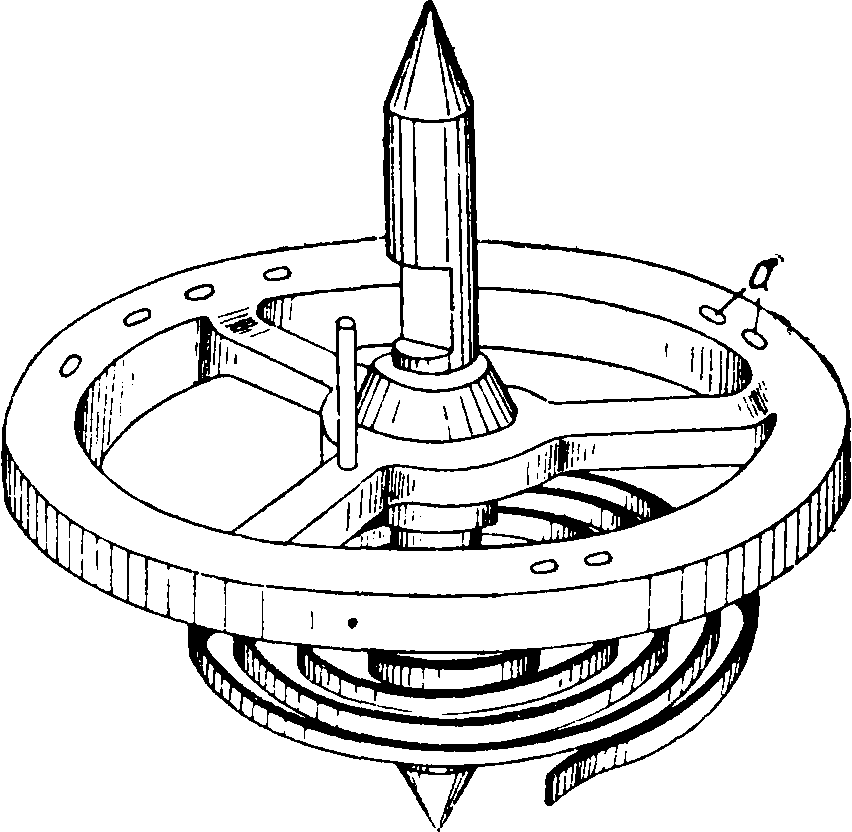
В переносных Ч. в качестве регулятора употребляется небольшое колесо с тяжелым ободом—б алане, направляющей силой для которого служит пружина (волосок), сидящая на его оси и неподвижно закрепленная на свободном конце. На фигуре 12 дан обыкновенный моно-металличе-ский (однородный) баланс будильника с осью и плоской спиральной пружиной.
Если ось наставить на подпятники и свободный конец пружины закрепить неподвижного в таком виде баланс может служить регулятором, и если его, отклонив от положения равновесия, предоставить самому себе, то он будет совершать колебательное движение под действием спиральной пружины, стремящейся вернуть баланс в положение равновесия. При этом предполагается, что баланс уравновешен, то есть центр тяжести его лежит на оси вращения, и никакие другие силы на него не действуют. Для уравновешивания такого баланса по ободу его высверливают небольшие углубления а. Обозначая через I момент инерции баланса относительно оси вращения и через К момент пружины при закручивании ее на 1 радиан, получим ур-ие движения баланса:
Фигура 12.
Ιά2+Κφ=0.
(6а)
Ур-ие это по виду то же самое, что было выше выведено для маятника. Общий интеграл этого ур-ия будет
φ=Ф Sin (wt — a),
где Ф—амплитуда, a—начальная фаза и со== |/~f—угловая скорость. Период колебания будет
Т=^=2я]+·
По условию К =, где Е—модуль упруго сти, b—толщина, h—ширина и L—длина волоска. Подставляя вместо К его значение в_вы-ражение (8), мы получим
Т:
V ЕЬЧ V Eb3h
m
T. к. в выражение периода амплитуда не входит и рассмотрение явления не ограничено малыми амплитудами, то колебания будут изохронны при всяких амплитудах, пока на ось баланса не действуют никакие силы кроме вращающего момента спиральной пружины, возрастающего линейно с углом отклонения. Это на первый взгляд простое условие соблюсти в действитель-. ности без применения специальных мер невозможно. Обыкновенная плоская спиральная или винтовая (цилиндрическая) пружина развертывается и свертывается не концентрически; ц. т. ее при развертывании описывает довольно сложные кривые, и т. к. пружина одним концом укреплена в особой втулке—р ольке, сидящей на оси баланса, то очевидно, что перемещение центра тяжести пружины сказывается на правильности колебаний баланса, и изохронизм нарушается. Для того чтобы ц. т. пружины оставался во время деформации ее на месте и все время совпадал с осью вращения баланса, необходимо концы пружины изогнуть особым образом по кривым, предложенным инж. Э. Филипсом,—по так паз. концевым кривым Филипса.
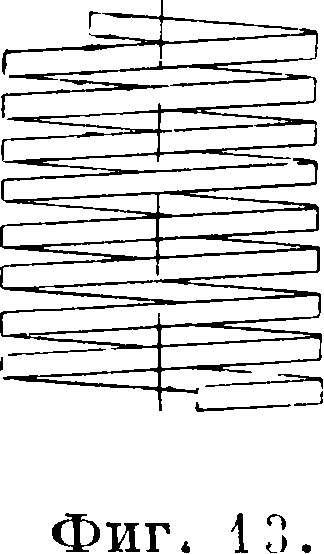
На фигуре 13 изображена сбоку винтовая пружина, снабженная концевыми кривыми, которая употребляется в морских хронометрах, а на фигуре 14 изображена в увеличенном масштабе <га же пружина, но сверху, причем для ясности одна из концевых кривых (задняя) опущена. Кривая начинается в точке А и кончается в месте заделки пружины Б.
Ц.- т. концевой кривой S должен лежать на перпендикуляре к радиусу, проведенному через начало кривой (первое условие Филипса); расстояние ц. т. от центра пружины х должен быть равно частному от деления квадрата радиуса г пружины на длину концевой кривой (второе условие Филипса). Т. о. согласно первому условию ц. т. должен лежать на стороне отрицательных ж-ов, т. к. положительное направление оси у-ов проходит через начало кривой; согласно второму условию рас-
Г1
стояние х должно равняться у 5 где I—длина
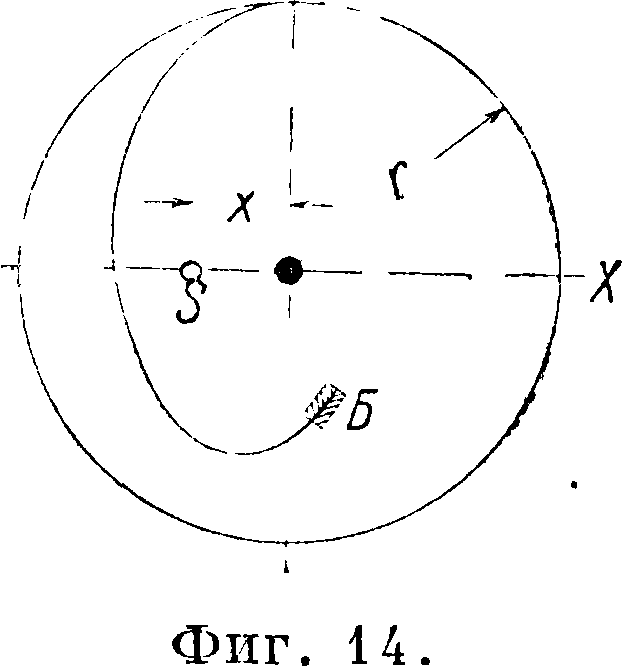
концевой кривой. Следовательно радиус пружины равен геометрическому среднему между длиной концевой кривой и расстоянием ее ц. т. Форма кривой роли не играет и м. б. любая, если соблюдены оба условия Филипса.
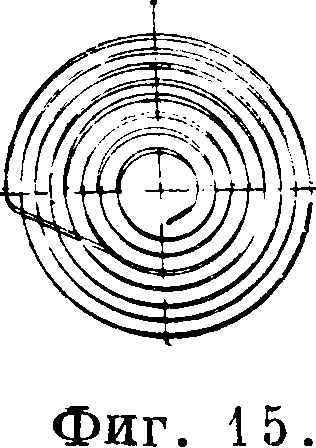
Фигура 15 изображает плоскую спираль, снабженную концевой кривой, завиток которой лежит вне плоскости спирали. Это—т. н. брегетовская спираль. Ж. Гроссман предложил кроме того снабжать плоские спирали т. н. внутренними кривыми, которые должны компенсировать перемещение ц. т., вызванное вырезыванием внутренних витков для укрепления спирали на рольке. Средние размеры спиралей— волосков — для карманных Ч. следующие: ширина 0,4 миллиметров, толщина 0,02 миллиметров и вес 15 мг.
Другой причиной, нарушающей регулярную работу баланса, является влияние несовпаде-ния.ц. т. баланса с его геометрии, осью. Вопрос
этот был исследован и изучен Э. Филипсом, и в результате его работ установлено, что изменение суточного хода будет иметь вид:
dT Ρ1 Λ * (л Ф2, Φί Ф6 /ГМЧ
Т ~2KC0S0 (1_Т+ Ϊ92~92Ϊ6 + ···) ’
где Р—вес баланса, I—расстояние его ц. т. до оси вращения, К имеет прежнее значение, Ф— амплитуда и δ—угол, образованный прямой, проведенной через ц. т. баланса в положении равновесия, с вертикалью. Скобки выражения (21) обращаются в нуль при 3,83^-3,84 радиана, что соответствует 219°27+- 220°Г в градусной мере. Т. о. если колебания баланса будут иметь эту амплитуду, то ошибка от несовпадения ц. т. не даст себя чувствовать. Если ход карманных Ч. в вертикальном положении б ю г е л е м (кольцо в головке корпуса) вверх принять за исходный и обозначить через Ανχ, то очевидно, что влияние несовпадения при вертикальном положении и бюгеле влево, вниз или вправо скажется иначе на работе баланса, и ход Ч. во всех этих положениях будет иной. Обозначая его соответственно через Αν2, Αν3и Αν4, можем определить угол δ через его тангенс по ф-ле: tg δ и произвести соот ветствующее исправление, не упуская однако из вида, что при малых амплитудах (< 220°) несовпадение ц. т. дает вообще опережение, тогда как при больших амплитудах (>220°) Ч. отстают по сравнению с ходом Ч. при горизонтальном положении циферблата.
Для того чтобы выяснить влияние размеров пружины, модуля упругости ее и момента инерции баланса на период колебания баланса, прологарифмируем и продиференцируем выражение (20). Мы получим
dT _ dl, dL _dh_ 3db _ dE (C>0.
T ~ 2 1 2L 2h 2 b 2Έ
Если например желательно выяснить, как изменится суточный ход с увеличением толщины пружины на 1% при условии, что все остальные параметры системы остаются без изменения, полагаем
dl_ dL_dh _dE_~
T “ ΊΓ —
dT
и кроме того, полагая, как выше, ~т~
Ат
88 400 ’
имеем
Αν=- 129 600 +=- 129 600 · 0,01 =
= — 1 296 ск/сутки,
то есть Ч. уйдут вперед (знак —) на 1 296 ск. за одни сутки.
Вопрос о компенсации на темп-ру. системы баланс—пружина несравненно более сложен, чем компенсация маятника. Сложность вопроса обусловлена тем обстоятельством, что в системе баланс—пружина под действием t° изменяются не только геометрии, размеры баланса и пружины, но также и величина противодействующей силы, то есть изменяется упругость пружины: при повышении t° пружина слабеет и при понижении t° становится более упругой. В случае маятника противодействующая сила для данного места земной поверхности была постоянна (д=Const), и вопрос компенсации сводится к сохранению геометрии, размеров маятника. Опыты, произведенные с Ч., снабженными латунным однородным балансом и стальной пружиной, показали, что при изменении t° на 1° С, Ч. дают суточный ход +11 ск., причем при повышении t° они отстают и, наоборот, при пониже-
Фигура 1G.
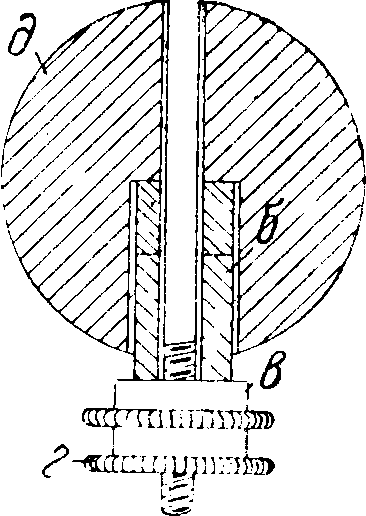
нии t° уходят вперед. Главная доля этого суточного хода приходится на изменение упругости пружины. Отсюда возникла мысль сконструировать баланс т. о., чтобы момент инерции его уменьшался с возрастанием t° одновременно с уменьшением силы волоска; тогда в формуле (20) числитель и знаменатель подкоренного выражения изменятся в равной мере, и дробь, а следовательно и период, останется без изменения. Т. о. возникли компенсационные биметаллические (из двух металлов) балансы, представителем которых является обыкновенный биметаллический (разрезной) баланс для карманных Ч. (фигура 16). Он состоит из прямой перекладины а, через к-рую проходит ось баланса, и укреплен-ногоша этой перекладине обода б, спаянного по всей длине из двух концентрич. колец (внешнего латунного и внутреннего стального) и затем разрезанного в двух местах около перекладины. При повышении t° латунь расширяется сильнее стали (Г-ный коэф. расширения латуни 17,4· 10”6, а стали 11,5· КГ®) и свободные концы обода с ввинченными в них тяжелыми винтами в, в прогнутся внутрь, уменьшив тем самым момент инерции баланса; 4 винта г служат для уничтожения несовпадения ц. т. баланса с осью вращения. При понижении t° концы обода изогнутся наружу, и момент инерции баланса увеличится. Величина получаемой при этом компенсации м. б. изменена путем переставле-ния винтов к концам половин обода, для чего отверстий в ободе всегда делается больше, чем винтов для возможности регулировки.
Теорию биметаллич. обода и вообще биметал-лич. пластин дал франц. ученый И. Вилларсо. Главнейшие следствия из этой теории следующие: а) для наибольшей чувствительности биметаллич. пластинки (то есть чтобы при одном и том же изменении t° она изгибалась возможно больше) необходимо, чтобы толщины обоих металлов ("непременно различных) относились обратно пропорционально корням квадратным из модулей упругости их и чтобы общая толщина пластинки была как можно меньше; б) траектория конца полуобода при изменении t° практически может считаться прямой линией и в) нейтральный слой биметаллич. пластинки, изготовленной при помощи какой-либо термин. обработки, лежит вне пластинки, то есть все части пластинки все время находятся в напряженном состоянии. Следовательно если пластинка изготовляется из латуни (2^=11 000 килограмм! миллиметров2) и стали (Е2=22 000 килограмм {мм2), то толщина стали должен быть меньше в |/~’^^=]/~2=1.42 раза. На практике берут обычно отношение
7
либо - либо 1,5. Толщину всей пластинки делать малой нельзя, т. к. под влиянием центробежной силы пластинки обода будут изгибаться наружу и искажать работу баланса. При изготовлении пластинки холодным путем можно в значительной мере ослабить внутренние на
Фигура 17.
пряжения в пластинках. Несмотря на применение биметаллич. пластинок компенсация такого рода все же является несовершенной.
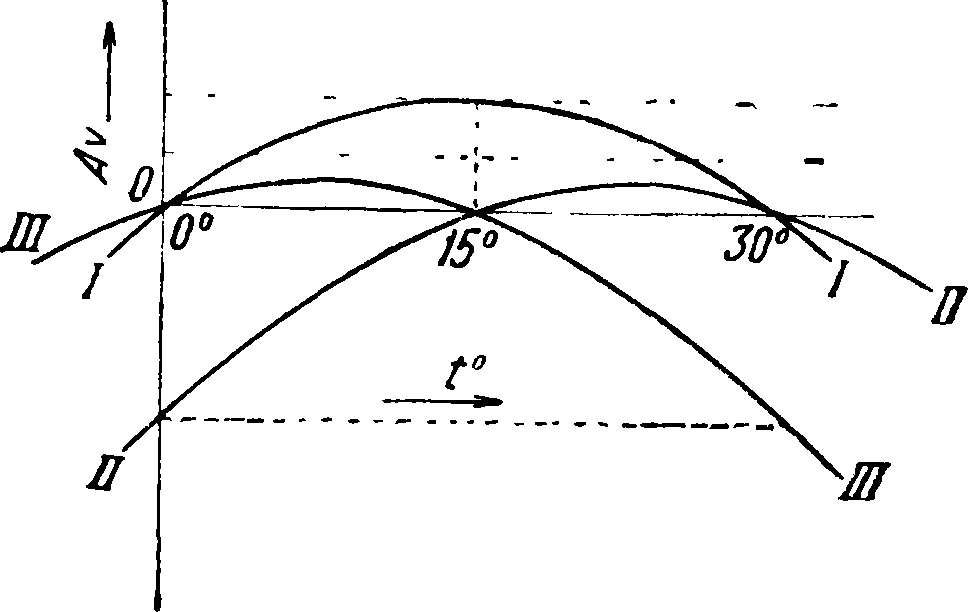
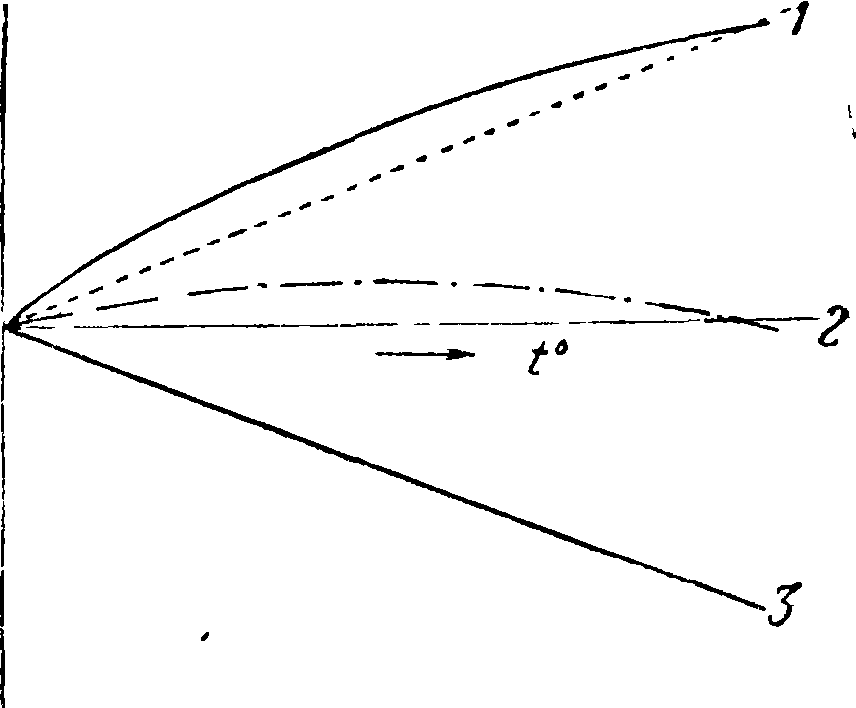
Англ, часовщик Э. Д. Дент заметил, что если хронометр отрегулировать на правильный ход при 0° и 30°, то при 15° он уйдет вперед приблизительно на 2 ск. в сутки (кривая 1 на фигуре 17). Это получается вследствие того, что зависимость суточного хода от t° не линейная. Явление это было названо вторичной ошибкой, или аномалией Дента. Кривая I дает суточный ход хронометра, отрегулированного при 0° и 30° (т. н. i° компенсации) в ф-ии i°. Если хронометр был отрегулирован при 15° и 30°, то в середине этого интервала он уйдет вперед на V2 ск., зато при 0° отстанет на 4 ск. (кривая 1Т) если же регулировка производилась при 0° и 15°, то при 7,5° получится опережение на 1!2 ск., а при 30° отставание на 4 ск. (кривая III). Происхождение вторичной ошибки м. б. объяснено двояко. Согласно старой точке зрения, ко- +торую впервые высказали англ, астро- | ном Эри и франц. ин- у женеры Деламарш ^ и Плуа, модуль уп- -ругости Е уменьшается линейно с Г, вследствие чего происходит отставание (фигура 18, кривая 3) хронометра. Момент инерции баланса уменьшается с t° не по линейному закону, а медленнее, благодаря чему баланс будет или перекомпенсирован при средних t° пли недокомпенсированпри 30° (кривая 1). В результате вычитания ординат кривой 3 (по абсолютной величине) из ординат кривой 1 получается кривая 2, представляющая собою ход вторичной ошибки в зависимости от t°. Новая точка зрения, принадлежащая директору Международного бюро мер и весов Ш. Э. Гильому, трактует вопрос иначе.
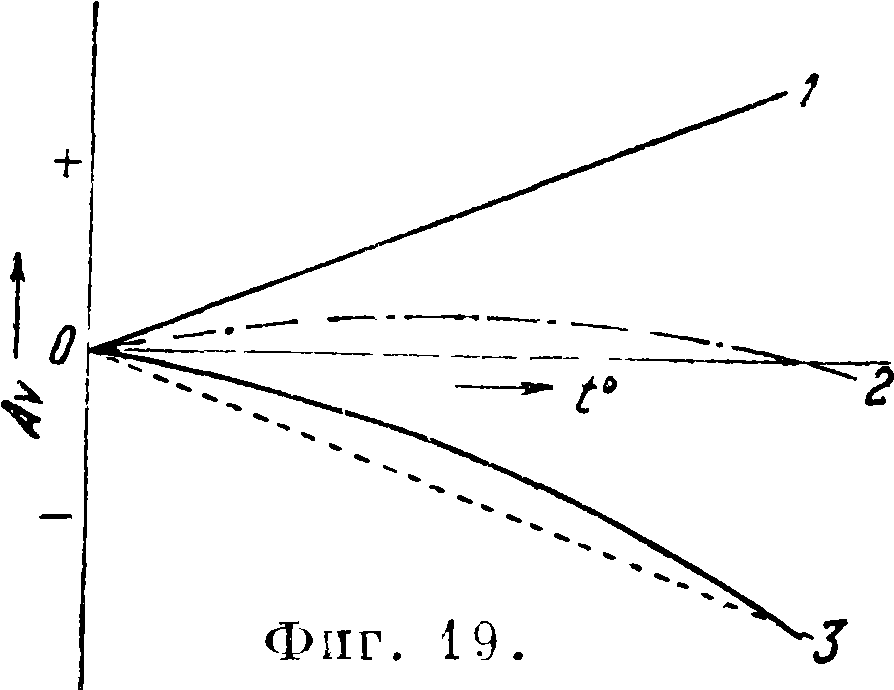
По мнению Гильома отставание хронометра вследствие ослабления пружины от нагревания происходит не по линейному закону в зависимости от t°, а быстрее (фигура 19, кривая 3). а компенсация (кривая 1)—линейна. В результате вычитания (по абсолютной величине) ординат кривой 3 из ординат кривой 1 получается снова аномалия Дента (кривая 2). Эти две совершенно различные точки зрения на природу явления дают один и тот же конечный результат. Расширение металлов, составляющих биметаллич. обод, происходит по закону
Et=L0 (1 + at -Ь βί2),
причем оба коэф-та при t и t2 положительны. Величина первого коэф-та а для стали и латуни различна, тогда как второй коэфици-ент приблизительно одной и той же величины. Компенсирующее действие (action compensatrice) по Гильому пропорционально разности расширяемости обоих металлов и поэтому зависимость его от t° будет (а2 — аг)£ 4- (β2 — βχ) t2, но т. к. β2=βι, то второй член обратится в нуль, и зависимость компенсирующего действия от t°
представится в виде прямой линии (1 на фигуре 20), которая получится в результате вычитания ординат кривой 2 для стали из ординат кривой 3 для латуни. Т. о. объясняется прямолинейный ход компенсации на фигуре 19. Чтобы уничтожить вторичную ошибку, необходимо, чтобы кривая компенсации представляла собою зеркальное изображение кривой отставания вследствие ослабления пружины. Эта задача была решена Гильомом путем введения в практику часового дела никелевой стали с отрицательным коэф-том β линейного расширения. Сталь эта будет расширяться по закону Lt — L0 (Iat— - fit2). Путем кропотливого подбора содержания никеля удалось подобрать β т. о. (фигура 21), что в результате вы-
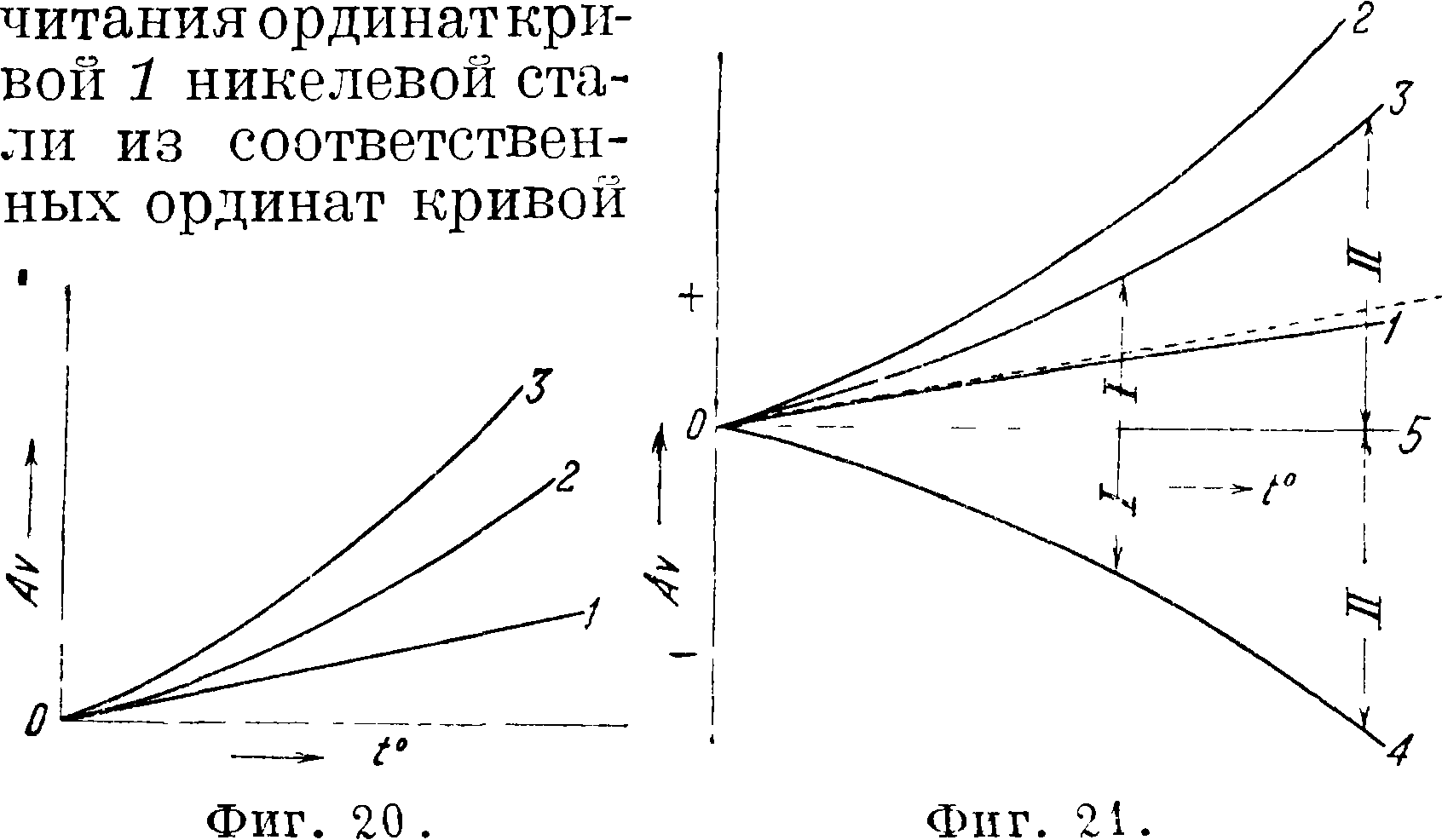
2 латуни кривая компенсации 3 получила необходимую кривизну и наклон для того, чтобы в результате алгебраич. сложения ее с кривой 4 отставания вследствие ослабления пружины получилась прямая линия хода 5, слившаяся с осью ж-ов.
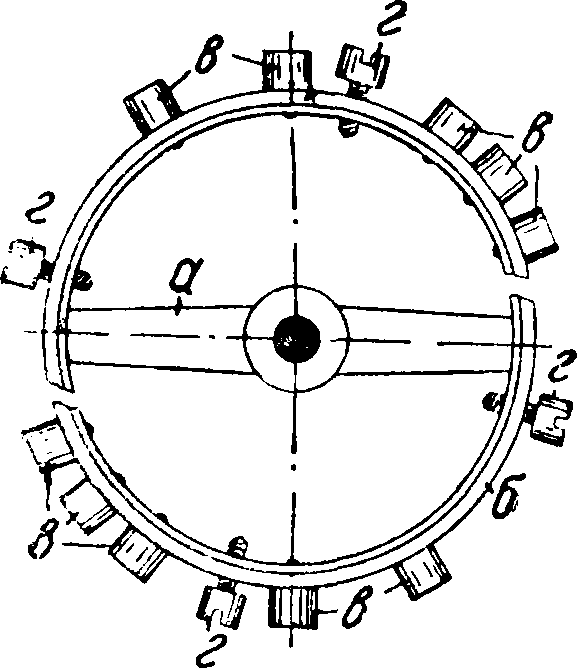
Фигура 22 дает т. н. интегральный баланс Гиль-ома для морских хронометров с бкметаллич. ободом из латуни и никелевой стали. Своим названием он указывает, что он исправляет все ошибки, свойственные балансам. Никелевая сталь, из которой изготовляют внутреннее кольцо обода, содержит 44% Ni и является особой разновидностью инвара (от франц. invariable— неизменный), то есть стали с очень малым коэф-том линейного расширения. Наряду с инваром Ги-льом открыл другой сплав—элинвар (51%Fe, 37% Ni и 12% Сг). который обладает тем ценным свойст-вом,.что вто модуль упругому ^ _ сти Е остается неизменным в
— <jkj- довольно большом диапазоне V ])) t°. Спиральные и винтовые
r^j пружины, изготовленные из этого сплава, дают возмож-ность применять однородный пг* ~2· латунный баланс, снабженный лишь небольшими биметаллическими придатками «аффиксами» а (фигура 23), причем в биметаллических пластинках этих балансов сталь должна лежать внутри или снаружи в зависимости от. термоэластических свойств пружины. Балансы этого рода нашли себе применение для средней хронометрии (карманные Ч.), т. к“, они очень дешевы, удобны и не деформируются от центробежной силы. Предложены они П. Дитисхеймом.
Другой вид компенсационного баланса, предложенный Ш. Воле, изображен на фигуре 24.
В нем металлы разделены: перекладина а—инварная, а обод б—латунный. При изменении 1° обод принимает эллиптич. форму и тем самым изменяет момент инерции. Симметричной пере- 1
становкой обоих грузов можно получить желаемую компенсацию. Стремление для наиболее ходовых сортов Ч. отказаться от разрезных балансов для уменьшения пертурбаций колебательного процесса от центробежной силы наряду с приданием балансу более гладких, легче обтекаемых воздухом форм вполне обосновано и“· своевременно.
Наряду с ί°-ной компенсацией от современных Ч. требуется также компенсация на баро-метрич. давление, в особенности для "бортовых авиационных Ч. Опыты (поставленные в последнее время) длят выяснения влияния переменного давления показали, что при понижении давления вплоть до вакуума Ч. уходят вперед на 7—18 ск. в сутки. При повышении давления до 3 килограмма/см2 сверх атмосферного получалось примерно той же величины отставание по сравнению с ходом при 750 миллиметров рт. ст. Очень сильное влияние на работу баланса, вплоть до полной остановки Ч., оказывает намагничивание частей Ч., органов хода и пружины, к-рое может иметь место благодаря близости Ч. с проводами, несущими сильный ток, или с электрич. машинами. Попытки заменить сталь для наиболее ответственных частей в Ч. до сих пор не увенчались успехом, тем более что немагнитные стали не обладают теми механич. свойствами, которые предъявляются часовой промстью к материалам для изготовления Ч.; до сих пор в т. н. антимагнитных Ч. только спиральная пружина делается из палладия, не обладающего однако ценными свойствами стали и в особен-
а
ности элинвара. Возможно заключить Ч. наглухо в толстый железный панцырь, сделав подкладку под циферблат также из железа, но, во-первых, сам корпус может намагнититься, во-вторых, он должен быть значительной толщины (>3 миллиметров), что, в особенности для карманных Ч., нецелесообразно. Намагниченные Ч. можно, размагнитить путем помещения их внутрь соленоида, питаемого переменным током (50 Hz), и последующего очень медленного и постепенного уменьшения этого тока до нуля или постепенным выниманием Ч. и медленным удалением их от соленоида. Установить факт намагничения Ч. можно при помощи магнитной иглы, но операция эта очень деликатная, т. к. игла реагирует и на мягкое .железо, кроме того можно легко еще намагнитить часы.
Баланс в обыкновенных карманных Ч. делает в час 18 000 колебаний (9 000 периодов), что соответствует 5 колебаниям в ск.; в Ч. малого размера это число доходит до 21 600 и 24 000 (то есть 6 и 6,666. колебаний в ск.). Баланс морского хронометра как более крупных Ч. делает 14 400 (4 колебания в ск.), а для будильников употребляются балансы, делающие 16 200 колебаний (4% в ск.). Такая большая скорость предъявляет исключительно серьезные требования к цапфам осей, т. н. к о и-чикам осей, и подшипникам балансов. На фигуре 25 изображена общепринятая конструкция
Фигура 25.
этих деталей. Кончик оси а диам. 0,07—0,15 миллиметров, заточенный раструбом, отшлифованный, закаленный, отполированный и снабженный на нижнем конце шароврй поверхностью, работает в отверстии «полудрагоценного» (Halbedelstein) сквозного камня б — рубина или сапфира. Искусственные камни, приготовленные в специальных печах синтетич. способом, ‘дешевле, лучше и однороднее естественных камней, обладают большей прочностью и меньшим коэф-том трения по отношению к стали. Ось опирается в другой т.н.накл адной (покровный) камень в Сквозной камень снабжен снаружи выпуклой поверхностью для того, чтобы в силу явлений волосности легче удержать масло (изображено на фигуре 25 черным) у отвер-. _____, стия для смазки оси. Масло для часов употребляется самого высокого качества, абсолютно нейтральное и незасыхающее; оно обыкновенно представляет собою смесь дистиллированного и вымороженного (для того чтобы не замерзало) костяного масла с легкими сортами парафинового масла. Применение чистого парафинового масла не рекомендуется из-за крайне неприятного свойства парафиновых и вообще минеральных масел—ползучести, благодаря к-рому масло расползается по частям механизма, оставляя место смазки почти сухим. Большое влияние на скорость засыхания (правильнее сказать окисления) масла оказывает природа и вид обработки смазываемых поверхностей. Опытами установлено, что поверхностная окись медьсодержащих металлов способствует позеленению масла с образованием медных солей жирных к-т. Фосфор, содержащийся в бронзе и прибавляемый иногда к автоматному железу для облегчения его обработки, а также посторонние включения, шлаки с содержанием алюминия и кальция, ускоряют окисление; масло делается тягучим и коричневым. Углерод в свободном и связанном состоянии в поверхностном слое цементируемых деталей каталитически разлагает масло. Чем глаже и ровнее поверхность, смазанная маслом, тем дольше оно будет держаться, зернистая же и крупнокри-сталлич. структура каталитически окисляют масло. Особенно важно, чтобы при чистке механизмов были полностью удалены остатки старого масла, окислы, зелень и следы растворителя и сырости. В последнее время наряду с указанными сортами часовых масел появились синтетические масла, которые представляют собою смеси (большей частью патентованные) органических веществ фенольного ряда (фенол, оксибензол С6Н5-ОН) с неорганич. веществами и животными (копытными) маслами. Масла эти в значительной мере устойчивы и зарекомендовали себя с хорошей стороны, но растворяются не в бензине, а в е (метилбензол С6Н5-СН3), что следует иметь в виду при чистке механизмов.
Живая сила колеблющегося баланса или маятника при колебании все время расходуется на трение о воздух pi на трение в оси (если таковая существует). Чтобы поддержать колебания на неизменной амплитуде, необходимо извне сообщать регулятору импульсы. Если амплитуда после импульса увеличилась на величину ΔΦ, то между этим увеличением и импульсом существует следующее соотношение: ΔΦ=|§, (23)
где К, как и раньше,—статич. момент, равный Ρλ для маятника и —для баланса, ΔВ—
величина подводимого импульса в гем и Ф— амплитуда. С точки зрения увеличения амплитуды совершенно безразлично, в какой момент был сообщен импульс, с точки зрения изменения периода момент получения маятником импульса играет большую роль. Как известно, можно провести аналогию колебательного движения с проекцией движения равномерно движущейся по окружности точки на какое-либо направление. Предположим, что регулятор совершает колебание с амплитудой Ф и движется справа налево (фигура 26). В тот момент, когда он дошел до отклонения φΐ9 ему сообщили извне импульс такой величины, что амплитуда регулятора увеличилась на величину ΔΦ и стала равной Ф + ΔΦ=Ф4. В этот момент точка агс окружности ФФ перейдет в точку bх окружности ΦχΦχ, откуда и будет продолжать свой путь влево. Угол при этом выпадает из счета времени, т. к. точка прошла его вне времени, следовательно период сократится. Если точка получит импульс той же величины (то есть вызывающий то же увеличение амплитуды), но ближе к положению равновесия в точке а2, соответственно отклонению ψ2, и перейдет в точку Ь2
на окружности ΦχΦχ, то, как видно из фигура 26» угол <5 2 < и уменьшение периода будет не так велико, как это имело место при отклонении <рг. Если тот же импульс сообщить регулятору после прохождения им положения равновесия, например при отклонении <р“, то, как видно из фигура 26, точка а3—b3 дважды пройдет угол <53 и он еще раз войдет в счет времени, что повлечет за собою увеличение периода. Максимальное значение угла δ получаем, если импульс сообщен регулятору в одном из его крайних положений, например при угле ^4, чему соответствуют точки flj и 64 и угол <54.
Легко видеть, что импульс только в том случае не повлияет на период, когда он сообщен в момент прохождения регулятора йерез положение равновесия. Отсюда следует теорема Эри (Airy): положительный импульс, сообщенный регулятору до прохождения им через положение равновесия, уменьшает период; положительный импульс, сообщенный регул я · тору после прохождения им через положение равновесия, увеличивает период; изменение периода в обоих случаях тем больше, чем дальше в рассматриваемый момент находится регулятор от положения равновесия. Отрицательные импульсы (то есть импульсы, уменьшающие .амплитуду) действуют наоборот. Все эти рас суждения имеют в виду мгновенный (внезапный) импульс. В действительности же импульс будет не мгновенным, т. к. происходит во времени, и смотря по продолжительности б. или м. приближается к мгновенному. Таковы импульсы, передаваемые регулятору-ходом при работе в Ч. Если такой немгновенный импульс расположить т. о., чтобы половина его пришлась до положения равновесия, а другая половина после положения равновесия, то в силу только что сказанного период не изменится, т. к. первая половина вызовет такое же опережение (уменьшение периода), какое отставание (увеличение периода) повлечет за собою вторая его половина. Если импульс расположен несимметрично, то буде“г иметь место или опережение или отставание в зависимости от того, в какую сторону будет смещен импульс. Очевидно, что величина изменения периода будет также изменяться с амплитудой. Чем больше амплитуда, тем менее чувствительна будет несимметрия импульса, тем менее будет увеличение амплитуды (23). Наоборот, при малых амплитудах несимметрия дает себя сильнее чувствовать, и изменение периода будет больше. Под эту же категорию явлений можно отнести сопротивление среды и трение. Оба фактора можно рассматривать как сумму бесконечно большого числа бесконечно малых отрицательных импульсов, стремящихся уменьшить амплитуду колебаний регулятора. Как было упомянуто выше (фигура 19), колебания регулятора будут затухающими, причем период колебаний увеличивается по сравнению с периодом свободных колебаний. Т. к. амплитуда колебаний непрерывно и постепенно уменьшается, то аналогию с движением сравнительной точки по окружности с равномерной скоростью здесь применить нельзя; сравнительная точка будет двигаться по логарифмич. спирали, непрерывно приближаясь к началу координат, к-рое является проекцией положения равновесия. При таком пред-, положении очевидно, что длина дуги каждого нисходящего колебания будет больше, чем следующего за ним восходящего, и следовательно суммарный импульс трения или сопротивления среды будет больше при нисходящем колебании, что влечет за собою отставание (увеличение периода). К этому обстоятельству еще присоединяется увеличение асимметрии положительного импульса, передаваемого ходом, причем большая часть импульса придется на восходящее колебание, что, как известно, также вызывает отставание.
Механизм, который является промежуточным между колеблющимся регулятором и вращающейся колесной системой Ч., называется не совсем удачным, но укоренившимся термином ход. Роль хода заключается в сообщении передаточному механизму часов правильного, через строго определенные промежутки времени повторяющегося движения и в поддержании колебаний регулятора путем передачи ему импульсов от часового двигателя—завода. Любопытно отметить, что при помощи плавного вращательного движения нельзя получить той большой точности, которая получается при прерывистом, но регулярном движении. Ход должен удовлетворять следующим условиям:
а) как можно меньше влиять на свободу колебаний регулятора и в особенности обеспечивать наименьшую возможную затрату живой силы регулятора на освобождение ходового колеса;
б) импульсы, передаваемые ходом регулято ру^. б. все время одной и той же величины;
в) освобождение хода и импульс, передаваемый регулятору, должны иметь место в момент прохождения регулятора через положение равновесия, причем импульс должен быть по возможности кратковременным; г) трение в органах хода должен быть небольшим и неизменным, потребность хода в см&зке должен быть минимальной и ход должен работать по возможности без смазки; д) ход должен быть возможно более простым и надежным в работе. Всякий ход в большей или меньшей степени удовлетворяет этим условиям, от чего и зависит их назначение и область применения. Поддержание колебаний регулятора возможно осуществить двумя способами, а именно: при помощи увеличения скорости регулятора (кинетич. привод), что должно иметь место как можно ближе к положению равновесия, и при помощи увеличения направляющей силы, приводящей регулятор в положение равновесия (потенциальный привод), что должно иметь .место в крайних точках отклонения, то есть при наибольшей амплитуде.
Часовые хода разделяются на хода для маятника и хода для баланса, причем и те и другие в свою очередь м. б. несвободными и свободными. В несвободных ходах неподвижное ходовое колесо своим зубцом опирается на движущуюся часть регулятора или на деталь, жестко связанную с регулятором, вследствие чего имеет место т. н. трение на покое; регулятор движется несвободно, что отражается на амплитуде, изохронизме и прочие В свободных ходах регулятор сцепляется с ходом на короткое время для того, чтобы, освободив своей живой силой ходовое колесо, получить от него импульс. Импульс регулятора со стороны хода может передаваться при каждом колебании вправо и влево, либо только при колебании в каком-нибудь определенном направлении, только правом или только левом. В таком случае во время другого колебания регулятор не получит импульса, и это колебание будет мертвым или потерянным. Хода эти называются ходами с мертвым или потерянным ударом. Наконец ход может иметь такое устройство, что импульс, передаваемый регулятору, будет всегда одной и той же величины независимо от силы завода и потерь на трение,—это будут хода с постоянной силой. Кроме того существует класс электрич. ходов, которые используют для работы силу электромагнитного притяжения. Хода, главною составною частью которых являются ходовое колесо и якорь (анкер, скобка), принадлежат к разряду анкерных ходов, хотя по современной сокращенной терминологии под этим названием понимается только свободный анкерный ход для карманных Ч.
Представителем несвободного анкерного хода является англ, крючковый ход, представленный на фигуре 27, А. Составными частями его являются скобка (якорь) а и ходовое колесо б. Якорь при помощи вилки жестко связан с маятником, к-рый в данный момент движется вправо, оканчивая восходящее колебание. Зубец ходового колеса лежит на входной палетте в якоря и благодаря наклону ее слегка отходит назад, то есть ходовое колесо поворачивается слегка против часовой стрелки. При обратном движении маятника зубец будет скользить по входной палетте, сообщая якорю и связанному с ним маятнику импульс, т. к. колесо стремится
Фигура 27.
вращаться по часовой стрелке под действием завода, а рабочая поверхность входной палет-ты наклонная. Импульс будет продолжаться до тех пор, пока зубец не соскользнет с входной палетты. Затем колесо б быстро повернется направо, и зубец, стоящий перед правой выходной палеттой г, упадет на нее. После падения зубца маятник будет все еще двигаться влево, описывая дополнительную дугу, закончит ее и пойдет обратно. Зубец, лежащий на выходной палетте, скользя по наклонной плоскости импульса выходной палетты, сообщит маятнику второй импульс. Угол а между радиусами, проведенными из оси качания якоря через точку касания зубца с соответственной палеттой при его падении на палетту и через крайнюю точку палетты, называется углом импульса. Ход этот характерен формой рабочих поверхностей палетт якоря.Поверхность входной палетты выпуклая, поверхность выходной палетты плоская. В этом ходе после падения зубец отходит назад, чем в старину пользовались для исправления ! неизохронности маятника. !
В настоящее время ход этот с массивным якорем, как изображено на фигуре 27,А, почти не употребляется, зато находит себе применение дешевое исполнение этого хода (шварцвальдский ход) с гнутой стальной скобкой (фигура 27, Б) для Ч.-ходиков,изготовляемых 2-м Государственным часовым заводом. Применение этого хода выгодно для коротких маятников (продолжительность одного колебания 72 и 74 ск.). На той же фигуре показана в виде дуги шпор упрощенная диаграмма работы хода. Дуга тр изображает двойную амплитуду маятника, в точках п и о зубцы спадают с палетт, тогда при правом качании импульс имеет место от т до о, при левом качании—от р до п, на участках ор и пт происходит отход назад. Тогда по представляет собою тот угол а. во время которого маятник получает импульс, а дуги пш и ор будут дополнительными дугами. Переход от импульса к дополнительной дуге сопряжен с т. н. падением ходового колеса, измеряемым дугой f окружности колеса, благодаря которому возникает всем известное тикание Ч. Падение необходимо всегда предусмотреть для того, чтобы ход не мог заклиниться при возможных неточностях изготовления. Входящее трение, с которым движется зубец по палетте, после того как он упал на нее,—фактор крайне нежелательный в часовых механизмах даже при хорошей смазке; он служит причиной того, что в точных Ч. ход этот никогда не употреблялся, уступив свое место ходу Грагама, который и до сих пор пользуется всеобшдм распространением (фигура 27, В). Якорь а хода Грагама снабжен отшлифованными с обоих концов отдельными вставными палеттами виг для возможной замены или исправления. Рабочие поверхности палетт цилиндрические; ось этого цилиндра совпадает с осью вращения якоря. Ход этот, так же как предыдущий и вообще все анкерные хода, работает по касательной, то есть ось вращения якоря лежит на пересечении двух касательных к внешней окружности ходового колеса б. На фигуре 27, В изображен тот момент, когда зубец только что соскочил с выходной палетты г, упав при этом на угол f, вершина которого лежит на оси вращения ходового колеса; соответствующий зубец лег на входную палетту в, на покой, величина которого определяется углом покоя/?. При качании справа налево острие зубца будет скользить по наклонной плоскости палетты—п л о с к о с т и импульса, поднимая входную палетту (поворачивая якорь) на угол импульса а. Зубец колеса наклонен вперед для того, чтобы касание зубца с палеттами имело место только в его острие. При движении доаятника вправо импульс начнется в точке о и окончится в точке <ι, при левом движении маятника начало и конец импульса будут точки р и п, участки по и р<] соответствуют покоям на входной и выходной иалеттах, а тп и qr—дополнительным дугам. Во избежание изгибания и износа кончиков зубцов ходового колеса, в особенности в крупных Ч. с тяжелыми маятниками, импульс иногда распределяют (фигура 27,Г) т. о., что часть его протекает на палетте,.а другая часть на зубце, для чего кончик зубца снабжается также наклонной импульсной плоскостью д. Зубцы такой формы называются швейцарскими в отличие от острых английских зубцов.
Для часов с коротким маятником и открытым видимым ходом часто употребляется ход Б р о к о (фигура 27, Д), палетты которого представляют собою полусрезанный цилиндр (оставшаяся часть заштрихована). Ход этот в известной мере схож с крючковым ходом, т. к. дает •легкий отход назад. Из диаграммы работы хода (фигура 27, В) следует, что импульсы распределены несимметрично; большая часть импульса приходится на восходящую дугу качания, вследствие чего получается отставание, величина которого по сказанному выше уменьшается
всем точно) формулируется так: ход дает опережение на больших дугах (амплитудах). Все хода, изображенные на фигуре 27, принадлежат к классу несвободных ходов (с трением на покое), т. к. у них маятник, жестко (посредством вилки) "связанный с якорем, движется несвободно вследствие того, что зубец ходового колеса, лежащий на палетте, трется о нее.
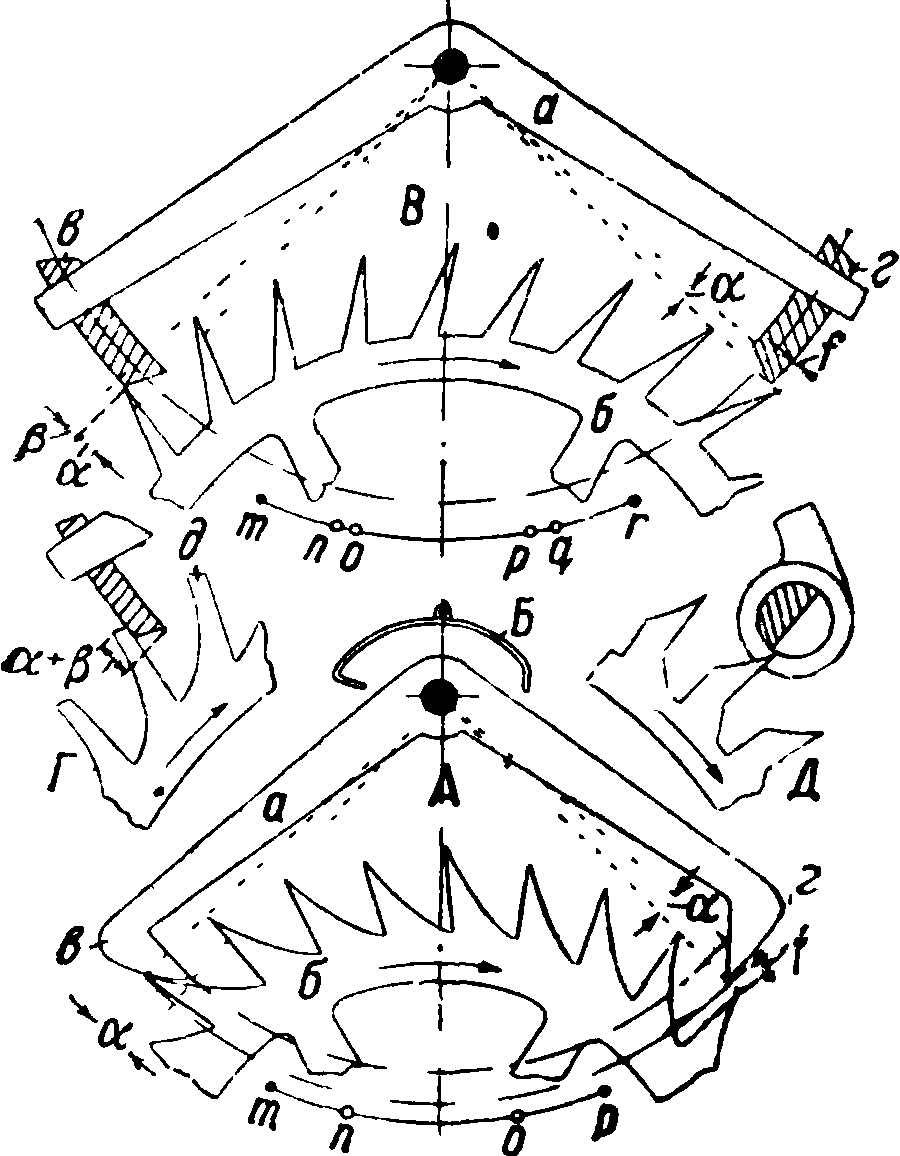
Ход Рифлера (фигура 28) является представителем класса свободных анкерных ходов для маятника с постоянной силой. Он применяется исключительно в точных астрономич. Ч. и требует хорошей установки Ч. (без тряски п вибраций) и умелого и бе-
режного обращения. До последнего времени он считается самым лучшим ходом для точных Ч. Маятник а подвешен на пендельфедере б, состоящем из двух стальных листков толщиною 0.10—0,11 миллиметров. Верхняя оправа в пендельфеде-ра посредством штифта г лежит на качающейся поперечине д. Другой связи между маятником и ходом нет. Поперечина д жестко связана с якорем А и может качаться на призмах, опирающихся на агатовые подушки е. Острое ребро призм поперечины д совпадает с осью вращения маятника, лежащей в расстоянии V3 длины пружин от верхней оправы пендельфедера. При движении маятника влево полусрезанная входная палетта ж освобождает зубец колеса покоя з, и оба колеса (колесо импульса к и колесо покоя з) поворачиваются на полшага по часовой стрелке до тех пор, пока зубец ζ2колеса покоя не ляжет на плоский срез выходной палетты и. При этом последняя будет отве-•дена вправо зубцом ζ3 колеса импульса, к-рое жестко вместе с колесом покоя насажено на общую ось. При этом поперечина д вместе с верхней оправой в повернется влево, пендель-федер б изогнется, и маятнику без всякого толчка будет передан импульс (потенциальный привод), к-рый в данном случае заключается в увеличении направляющей силы. Трение зубцов колеса покоя о палетту будет, самое незначительное, т. к. плоскости среза обеих палетт наклонены под углом 12° к радиусу ходового колеса в момент освобождения, в то время как угол трения латуни о камень палетты будет порядка 8г/2—9°. Справа на фигуре 28 изображена палетта ж и показаны пунктиром плоскости обоих колес з и к; колесо к работает на круглой, а колесо з на срезанной части палетты. Импульс, передаваемый маятнику, будет всегда одной и той же силы, т. к. пендельфедер всегда изгибается на один и тот же угол.
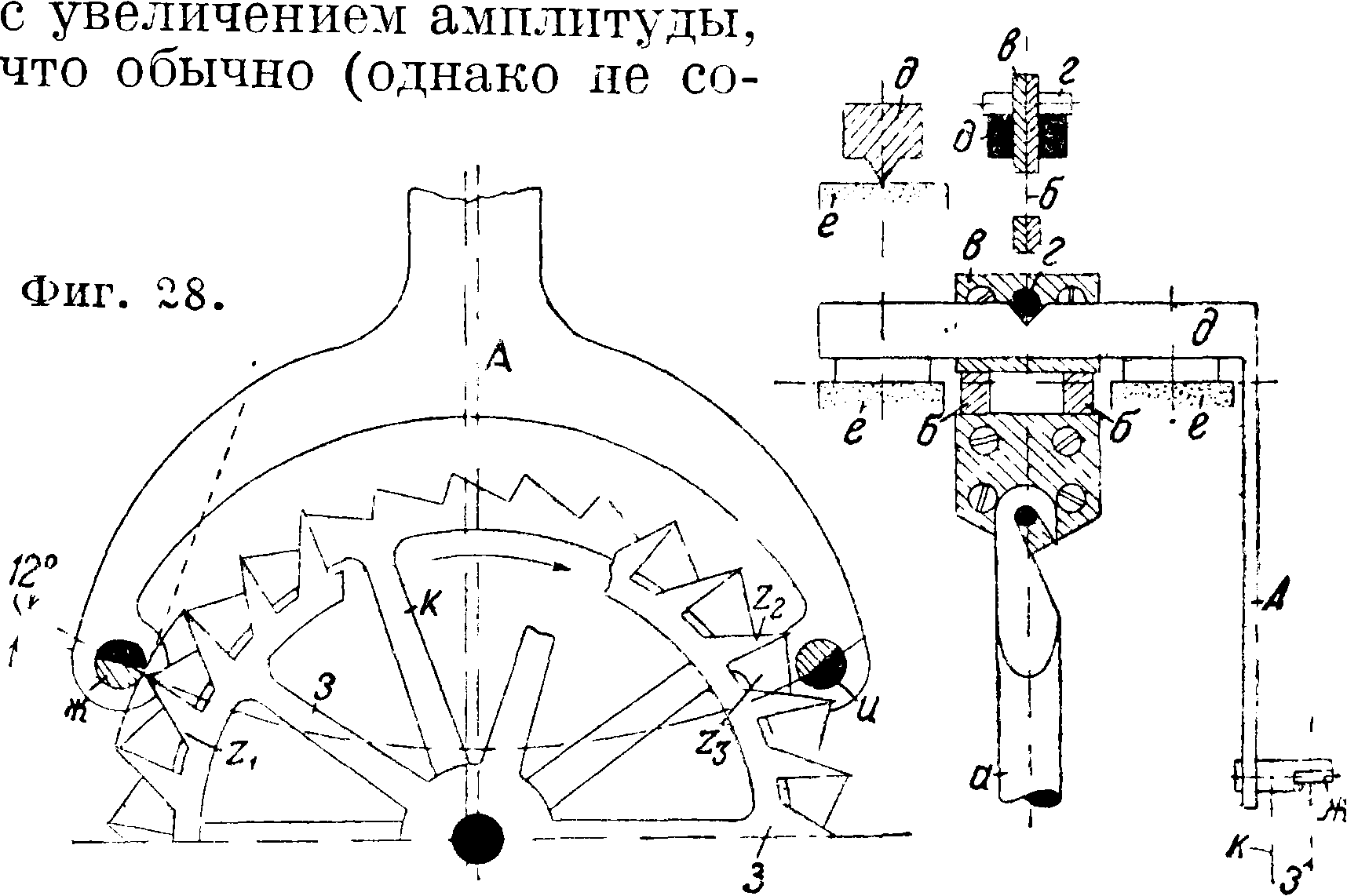
Из числа несвободных ходов для баланса еще и теперь находит себе применение цилиндровый ход (фигура 29). Несмотря на своеобразную, совсем непохожую на нормальный анкерный ход конструкцию ход этот принадлежит к разряду анкерных ходов с углом обхвата (то есть центральным углом, стороны которого проходят от оси вращения ходового колеса через середины палетт якоря), уменьшенным до возможного минимума, то есть до 72 шага, что при 15 зубцах ходового колеса составляет 12°. Палетты, которые в ходе Грагама вставлялись в якорь отдельно, в этом ходе образуют боковую и внутреннюю поверхность так называемого цилиндра (фигура 29,А), который представляет собою полированную внутри и снаружи трубку, закрытую сверху и снизу пробками или тампонами а с кончиками б для вращения в камнях подшипника. В нижней части цилиндр имеет два выреза, первый вырез оставляет стоять ок. 200° всей окружности, а второй, более глубокий, только 100°! Края первого среза играют роль палетт и называются губами: 1Х — входная губа и 12 — выходная. Нижний вырез г — т. н. проход, или п а с-с а ж, —служит для пропуска нижней части
зубца ходового колеса б. Ходовое колесо также довольно своеобразно (фигура 29,Б): головки е зубцов укреплены на ножках ж и устроены так, что почти весь импульс, за исключением небольшой его части, происходит на спинке головки зубца. На фигуре 29 сверху показана работа хода. Слева дано положение, когда зубец, лежащий на входной губе, переходит с покоя на импульс. Средняя часть фигуры фиксирует момент, когда цилиндр, дойдя до своего крайнего положения при повороте вправо, начинает двигаться в обратном направлении. Острие зубца скользит по внутренней поверхности цилиндра, причем зубец лежит на покое, а нижняя часть ножки входит в проход г. Наконец справа показан
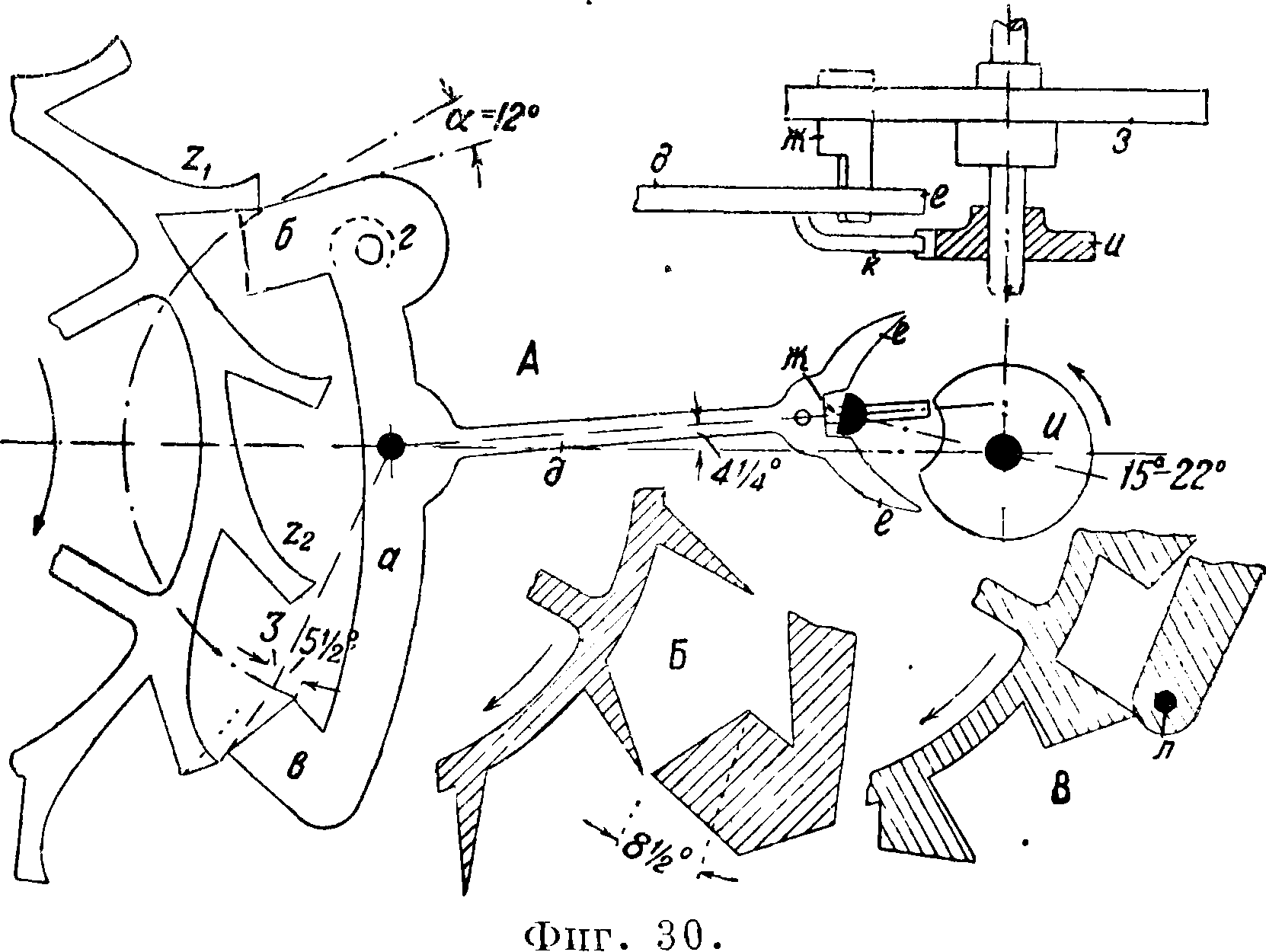
момент, когда спинка зубца поднимает правую выходную губу цилиндра, передавая импульс балансу, к-рый вместе с спиральной пружиной насажен на втулку, держащуюся трением на верхней не вырезанной части цилиндра. Ход этот, как видно, крайне прост и дешев, т. к. ходовое колесо можно изготовить штамповкой в два приема без всякой дополнительной обр^от-ки. Амплитуда колебаний цилиндра не превосходит 180° в каждую сторону и обычно бывает 150—160°; при амплитудах, больших 180°, может произойти заклинивание и поломка хода. Для устранения этого баланс снабжается упорным штифтом, к-рый ограничивает его амплитуду. Недостатком этого хода является наличие трения, к-рое требует применения масла и делает работу хода неустойчивой и не поддающейся точной регулировке.
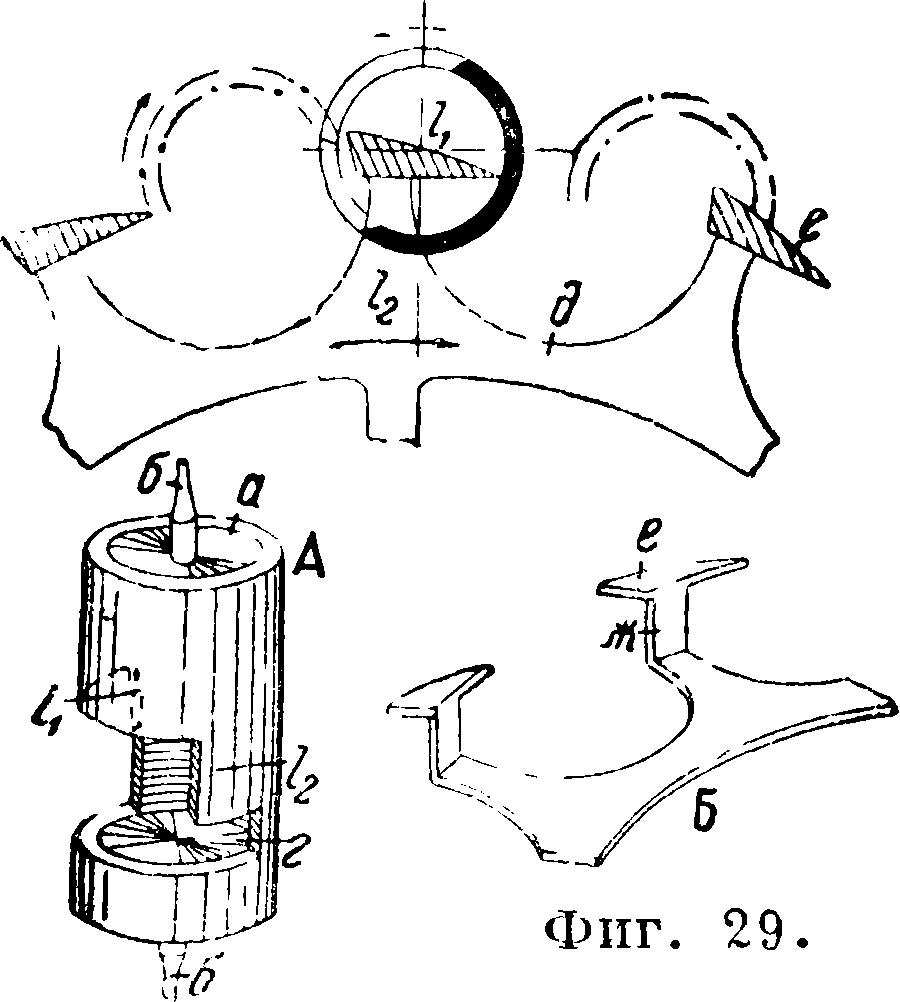
Самым важным и наиболее распространенным современным ходом является свободный анкерный ход для карманных Ч. (фигура 30). В настоящее время он повсеместно употребляется не только для карманных Ч., но и вообще во всех видах переносных часовых механизмов, тахометрах, регистрирующих приборах, приборах специального назначения и прочие и только в морских хронометрах он уступает первенство хронометро-вому ходу, к-рый является наилучшим именно для этих инструментов. Фигура 30, А изображает вид сверху немецкого анкерного хода с швейцарскими зубцами. Якорь а с палеттами б и в неравноплечий (т. к. не середины палетт, а поверхности покоя одинаково удалены от оси вращения якоря); он ограничен в движении неподвижным штифтом г, который входит в более широкое отверстие в якоре. Якорь составляет одно целое с вилкой д, снабженной р о ж к а м и е и вырезом, в к-рый входит к о-л о н hi т е и н ою, служащий для передачи им-
Фигура 31.
пульса балансу и укрепленный в импульсной рольке з, жестко связанной с балансом. Баланс только что прошел дополнительную дугу при вращении влево, и колонштейн вошел в вырез вилки. При дальнейшем движении до начала импульса он повернет вилку от крайнего верхнего положения приблизительно на IV20· На это баланс затратит часть приобретенной им во время движения кинетической энергии, тем более что рабочая плоскость входной палетты б наклонена к радиусу ходового колеса под углом притяж-к и α= 12° для того, чтобы обеспечить неподвижность вилки и якоря под давлением зубца ходового колеса. Теперь начнется импульс: сначала зубец zx будет скользить по плоскости импульса входной палетты б своим острием, а затем задняя кромка плоскости импульса вхбдной палетты начнет скользить по плоскости импульса зубца zl9 в результате чего вилка повернет колонштейн эю, а вместе с ним и баланс против часовой стрелки. По окончании импульса баланс начнет свою дополнительную дугу, двигаясь совершенно свободно, так как колонштейн вышел из выреза вилки якоря, и всякое соединение якоря с балансом прервалось. По окончании импульса ходовое колесо спадет, зубец £2ляжет на покой выходной палетты в и будет лежать до тех по{5, пока колонштейн, двигаясь по часовой стрелке, снова не переложит вилку в крайнее верхнее положение. Предохранительная ролька и, копье к и рожки е служат предохранительными органами хода для того, чтобы случайный толчок не перекинул вилку в другое положение, что повлекло бы за собою остановку хода Ч. Притяжка (угол а —12°) на обеих палеттах необходима для того, чтобы копье к не кась малой рольки и на покое и не терлось о ее боковую поверхность. При импульсе якорь поворачивается на 87а°, из которых 3° приходится на зубец и 57· на палетту. Весь подъем будет равен Г/2° покоя и 8720 импульса, всего 10°; падение равно 3° у английского и 1°30 у немецкого и швейцарского ходов. Расстояние колонштейна от оси вращения баланса подбирается т. о., чтобы баланс в-это время повернулся на угол 30—40°, причем наиболее употребительна первая цифра. При английском исполнении анкерного хода зубцы ходового колеса острые (фигура 30, Б) и палетта гораздо шире, т. к. весь импульс приходится на нее. На континенте этот тип анкерного хода почти не встречается. Зато штифтовой анкерный ход (фигура 30, В) употребляется для будильников и анкерных Ч. дешевого и массового исполнения. В штифтовом ходе весь импульс приходится на зубец, а притяжка осуществляется наклоном передней грани зубца на 18° к радиусу ходового колеса. Якорь лежит за плоскостью колеса, а штифты л, приклепанные к нему, играют роль палетт.
Хронометров ый ход с ходовой пружиной в том виде, как он употребляется в морских хронометрах, изображен на фигуре 31. В этом ходе ходовое колесо а при импульсе действует непосредственно своими зубцами на и м-
пульсный камень б, укрепленный в вырезе большой рольки в В положении, показанном на фигуре 31, ходовое колесо не вращается“ т. к. его зубец zx лежит на камне покоя укрепленном на ходовой пружине д. По * мере того как баланс поворачивается против часовой стрелки и импульсный камень подходит под зубец ходового колеса, спусковой камень с укрепленный в малой рольке эю, отводит золотую пружину з, опирающуюся на выступ ходовой пружины, а с ней и всю ходовую пружину вправо, пока зубец z г, лежащий на камне покоя г,
не соскочит с него. Тогда колесо начинает вращаться и зубец z 2, приходя
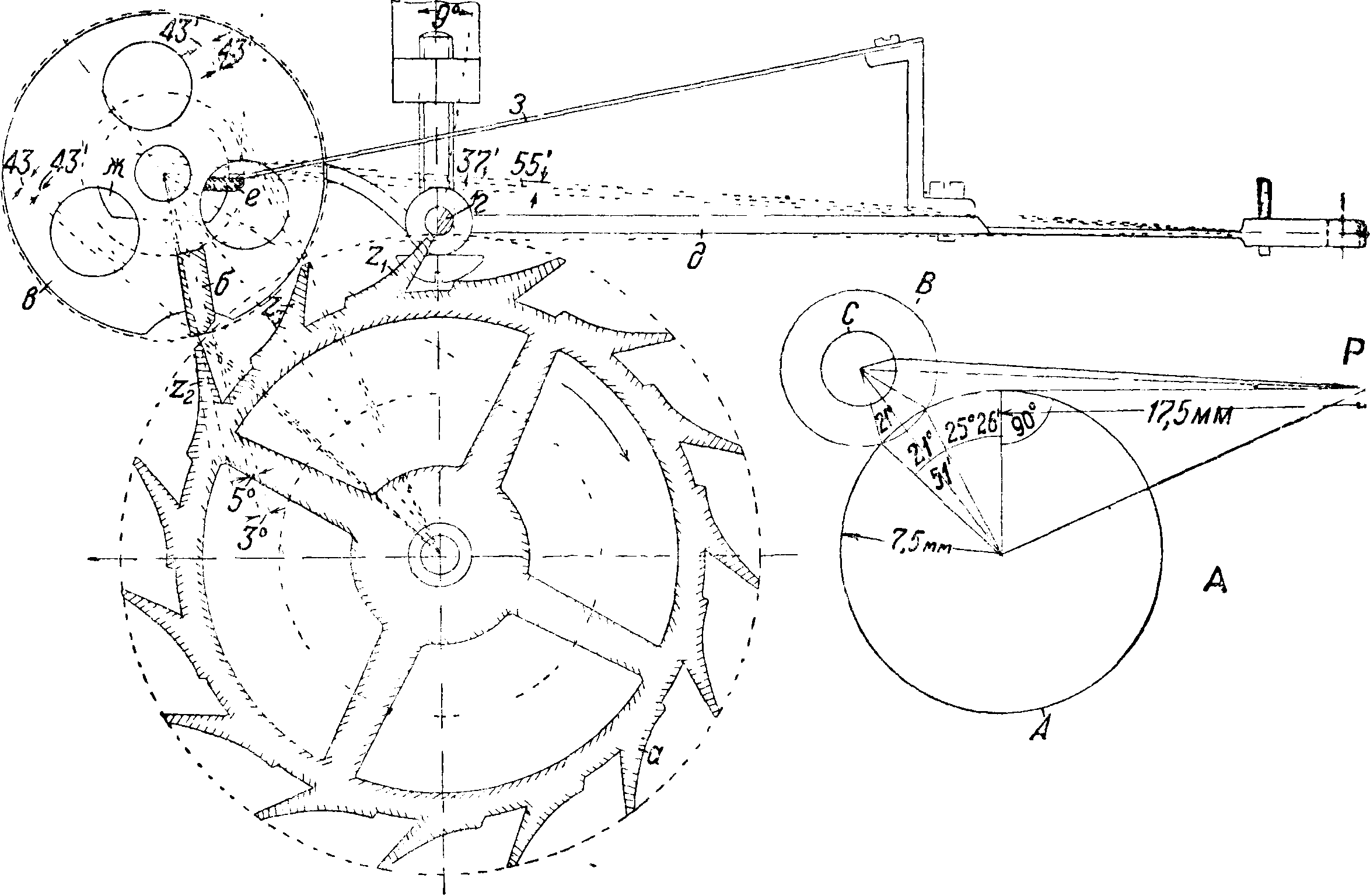
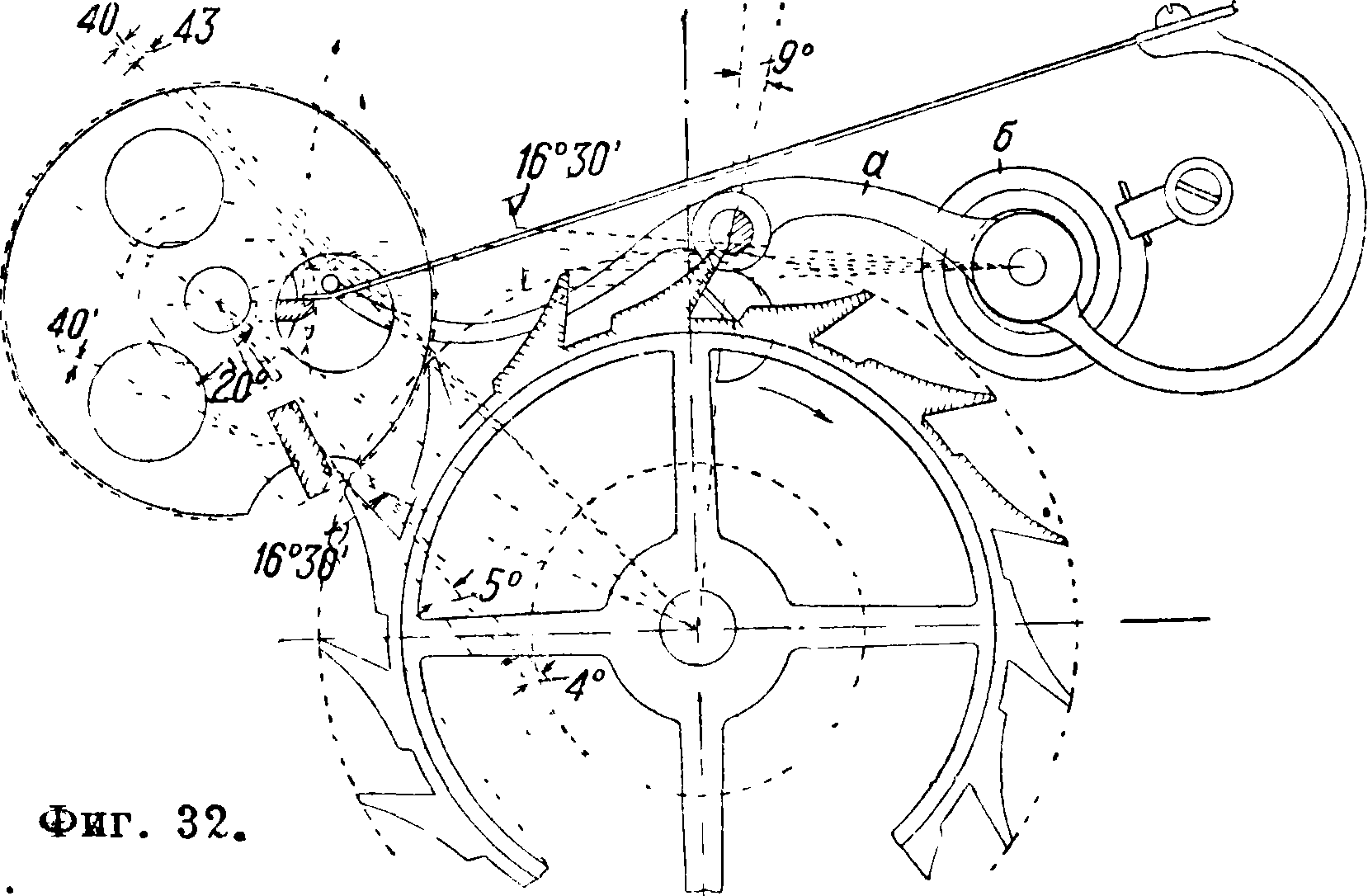
щийсяпротив импульсного камня, ударяет в него, сообщая балансу импульс. Ходовая пружина тем временем соскочит со спускового камня и снова займет свое нормальное положение, и следующий зубецz3 ходового колеса ляжет на нее. При обратном движении спусковой камень отогнет только одну золотую пружину и, сбросив ее с минимальной затратой живой силы, начнет дополнительную дугу по часовой стрелке. Т. о. каждое правое колебание будет мертвым, потерянным, без импульса. На фигуре 31,А изображено соотношение между окружностью ходового колеса А, окружностями, описываемыми импульсным Б и спусковым С камнями, точкой прикрепления Р ходовой пружины и величиной углов подъема ходовой пружины (55) “ импульса (21051). Плоскость камня покоя делается с притяжкой в 9°. Угол покоя равен 37; ходовое колесо освобождается после того, как импульсный камень на 5° пройдет острие неподвижного зубца z2-Передняя плоскость зубцаподнутрена наЗ°, чтобы касание происходило лишь в одной точке— вершине зубца. Тблщина вершины зубца и зазор в угловой мере взяты по 43. Ходовое колесо здесь, как и в анкерном ходе, имеет 15 зубцов, и т. к. баланс делает в час 14 400 колебаний, то стрелка хронометра будет передвигаться через каждые 1/2 ск. Как акустич. нониус при сличении хронометров часто употребляют т. и. тринадцатибойщик, продолжительность двух колебаний которого не 1/2=6/i2 ск., как у обыкновенного хронометра, а 6/13 ск. Этот хронометр должен давать с обыкновенным хронометром совпадение ударов через каждые 6 ск. Определяя число совпадений тринадцатибойщика с нормальным и затем со сравниваемым хронометром, можно определить суточный ход последнего по сравнению с нормальным. Другой вид хронометрового хода — хронометров ый ход с защелко й—представлен на фигуре 32. Здесь вместо ходовой пружины применена за-
щелка а, то есть жесткий рычаг, вращающийся на оси и возвращающийся в исходное положение посредством спиральной пружины б. В остальном этот тип хронометрового хода не отличается от пружинного. Он находит себе применение в небольших хронометрах, т.н. сравнительных Ч. карманного типа, т. к. меньше боится тряски и преждевременного спуска. Основным недостатком хронометровых ходов является так называемым остановка на покое, которая происходит тогда, когда баланс под влиянием внешних причин (толчок, сотрясение, резкий поворот всего механизма в плоскости баланса и прочие) получает отрицательный импульс настолько сильный, что амплитуда резко падает и ход останавливается. Хронометр после остановки не начнет идти сам, необходимо подтолкнуть баланс. Другим неприятным свойством хронометрового хода является галопирование, происходящее в том случае, когда внешние причины создадут добавочный положительный импульс, в результате которого баланс сделает амплитуду больше одного оборота (360°), тогда он получит подряд два импульса и следом за ними два мертвых колебания, а если амплитуда возрастет еще больше, то число импульсов м. б. и
3—4. Ч. будут пребывать в этом форсированном состоянии до тех пор, пока какая-нибудь внешняя причина не уменьшит их амплитуду до нормальной. Преждевременный спуск имеет место тогда, когда ходовая пружина или защелка ос- вободит зубец ходового колеса преждевременно; ходовое колесо повернется и зубцы его заклинят большую рольку, тогда ход останавли
вается. Для предотвращения этого недостатка фаске камня покоя дается наклон в 9—12° для того, чтобы она втягивалась под зубец, лежащий на покое (притяжка). Несмотря на перечисленные недостатки хронометровый ход является все же самым лучшим и точным для научных работ, астрономич. наблюдений, экспедиций и определения долготы на море.
Для передачи вращательного движения от одной вращающейся оси часового механизма к другой оси служат зубчатые колеса. В главном механизме Ч. ведомые оси всегда вращаются с угловою скоростью большею, чем ведущие оси, передаточное число будет всегда больше единицы; ведомыми всегда будут трибки, ведущими— колеса. Зубчатая пара—колесо и трибка—должна работать так, чтобы передаточное число было постоянным и не изменялось при переходе с одного зубца на другой, трение было наименьшим и профиль зубцов подобран т. о., чтобы зубцы как можно больше катились друг по другу и как можно меньше скользили. Передаточные числа в часовых механизмах всегда довольно большие: как наименьшее можно принять
3/г—4/ι; передача 8 —°/i встречается сплошь и рядом и иногда доходит до 15/г; при больших передачах рекомендуется брать две пары колес. Модули зубчатых колес и трибок в часовых механизмах колеблются в пределах 0,1—1,0 миллиметров. Т. к. при общепринятой эвольвентной передаче осуществление столь больших передаточных чисел при малом числе зубцов представляет трудности и зубцы колес получаются сильна подрезанными, то в часовом деле применяется почти исключительно циклоидальное зацепление и лишь в последнее время, когда появилась возможность исправлять эволь-вентное зацепление т. о., что оно сделалось пригодным для колес с малым числом зубцов, циклоидальное зацепление начало постепенно уступать свою позицию в пользу эвольвентного, к-рое со временем по всей вероятности и вытеснит первое окончательно. На фигуре 33, А дана трибка-шестерка (то есть имеющая 6 зубцов), сцепляющаяся с колесом в 60 зубцов. Часовое зацепление представляет собою частный случай циклоидального, когда радиусы г2 и г2 вспомогательных (катящихся) окружностей равны половине радиусов Rt и R2 начальных окружностей, при э^юм головки зубцов образованы эпициклоидами, а ножки обоих колес ограничены прямыми линиями. Профиль головки колеса при теоретически правильном зацеплении зависит от числа зубцов трибки и наоборот. На практике это неудобство обходят, довольствуясь приближенными профилями, ограниченными вместо эпициклоид дугами окружности. Зацепление ранее линии центров нежелательно, так как сопровождается входящим трением, поэтому головку ведомого колеса (трибки) закругляют, если продолжительность зацепления достаточно велика. Закруглять можно трибки с числом зубцов 8 и более; при 6 зубцах получится чересчур малая продолжительность зацепления. Толщина зубца колеса берется всегда равной г/2 шагα= 7ai, а толщину зубца трибки делают меньше для получения необходимого зазора. Так неравномерно распределяется зазор потому, что материал трибки (сталь) более крепкий, чем материал часового колеса (латунь). Размеры колес и трибок
t
принято выражать в модулях (модуль М= —).
Обозначая число зубцов колеса через z, трибки—через z, по швейцарским данным имеем:
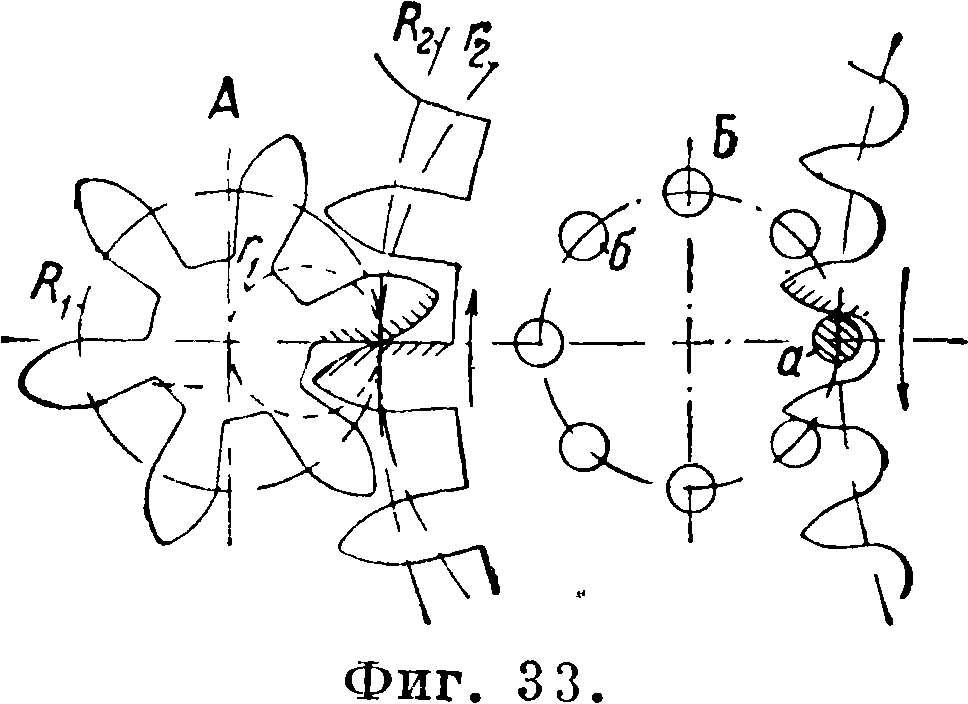
Колесо
Диаметр колеса (z+2,70)M Толщина зубца 1,57 М
Высота головки 1,35 М
Полная высота зубца. 2,90 М
Трибка
Диаметр трибки (z+l,48)Af Толщина зубца 1,15 М
Высота головки 0,74 М
Диаметр стержня .(ζ-3,50)Μ
Для мелких механизмов толщину зубца трибки иногда берут иную: 1,05 М для 6, 7, 8 и 9 зубцов, а для 10 и выше зубцов—1,25 М, хотя такой довольно резкий скачок ничем себя не оправдывает. Для дешевых механизмов, а также в тех случаях, когда есть основания опасаться загрязнения передачи, употребляются цевочные трибки (фигура 33, Б). В этом случае профиль зубца колеса должен быть ограничен кривою (фигура 34а), равноотстоящей от циклоиды (пунктирная кривая а) на расстоянии, равном радиусу цевки б.
Передача эта очень проста, дешева и действует вполне удовлетворительно, представляя в то же время то преимущество, что почти все зацепление, происходящее по линии Ов имеет место за линией центров. При эвольвентном зацепле-
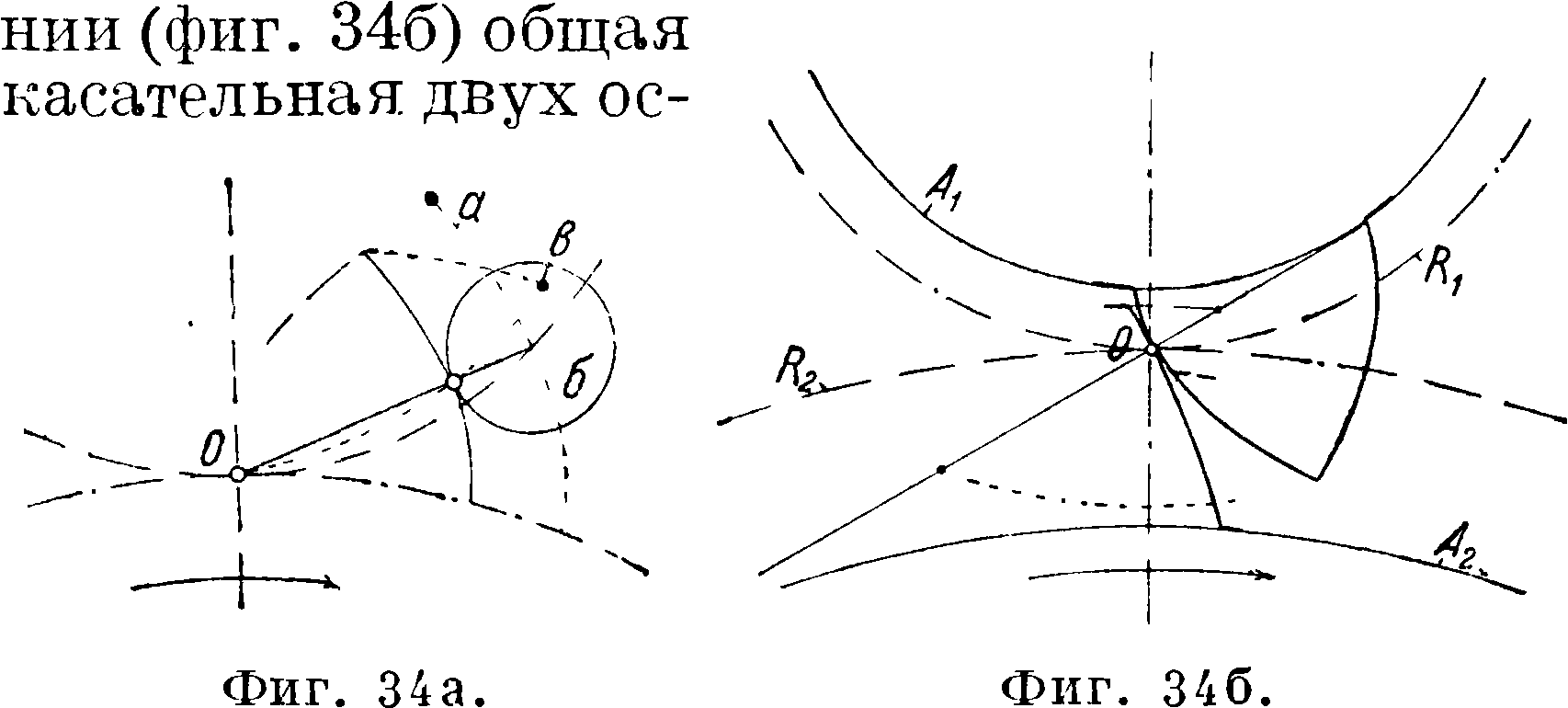
новных окружностей Аг и А 2 образует собою профиль то одного то сопряженного с ним зубца путем обкатывания ее по основным окружностям. и R2—начальные окружности, которые касаются друг друга и пересекаются с производящей прямой в полюсе О зацепления. Линия^ зацепления в отличие от циклоидального заце-‘ пления здесь прямая, совпадающая с общей касательной. Конические и червячные колеса и иные виды передач не нашли себе применения в часовом деле и если употребляются, то крайне редко. Расчет колесной системы Ч. производят, исходя из передаточных чисел и чисел оборотов колес, оси которых снабжены стрелками; их два: среднее колесо и секундное колесо; также играет роль число зубцов ходового колеса при заданном периоде баланса. Обозначая продолжительность завода через Та, время одного оборота барабана (в часах) через ta и число оборотов барабана через N, имеем
Ta=taN. (24)
Т. к. барабан делает один оборот в ta часов, а среднее колесо один оборот в 1 час, то ta численно равно передаточному числу от барабана к среднему колесу. Если через Nn обозначить число колебаний баланса или маятника в 1 час, число зубцов ходового колеса через zg, то передача п от среднего колеса к ходовому
Кроме того можно присоединить к этому как условие, если з Ч. есть секундная стрелка, что передача от среднего колеса к секундному равна 60. На этих данных основаны цифры, приведенные в таблице 1. Напр. очевидно, что карманные Ч. № 7 снабжены барабаном, делающим
41/2 оборота, т. к. передача ^=8 час. одного оборота барабана, что при продолжительности завода в 36 час. дает N=3^=4г/2; передача от среднего колеса к ходовому равнα= 600,
так как баланс делает 18 000 колебаний, а число зубцов ходового колеса равно 15. Это число получится и в результате деления произведения чисел зубцов колес на произведение чисел зубцов трибок, то есть 600· Передача от среднего колеса к секундному очевидно равна ιό4ό= 60, как и следовало ожидать. В годовых Ч.(№ 9) 1 оборот барабана происходит в — 8*’= 1 890 часов, что объясняется боль-
шой продолжительностью завода. По этому принципу рассчитывают все механизмы часов.
Под названием электрических или правильнее—э лектромагнитных Ч. понимают механизмы, в которых электрич. ток играет роль или источника силы для заводки Ч. или служит для передачи показаний главных—м аточных — Ч. на расстояние. Ч. первого рода правильнее назвать Ч. с электрич. заводами; представителем их являются Ч., где заводом служит двигатель Феррариса (фигура 35). Он состоит из красномедного или алюминиевого диска а, вращающегося в поле электромагнита б, питаемого переменным током, протекающим по обмотке в Для создания вращающегося поля один или оба полюса электромагнита разрезаны и на один из выступов насажено красномедное кольцо г. Благодаря этому возникает разность фаз магнитных потоков вбив, получается переменное поле, и диск начинает вращаться против часовой стрелки, если смотреть сверху. Этот двигатель при помощи небольшой пружинки передает движение промежуточному колесу, и Ч. будут идти с постоянным моментом на оси ходового колеса. Барабанное колесо с барабаном и добавочное колесо при таком заводе отгйдают как ненужные. Двигатель этот включен все время и действует непрерывно. Примером завода, действующего периодически и пригодного для постоянного и переменного тока, служит часовой завод системы
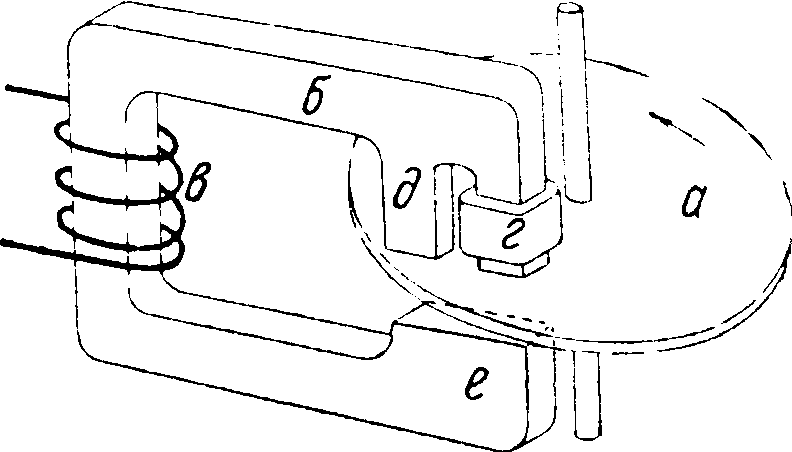
Фигура 35.
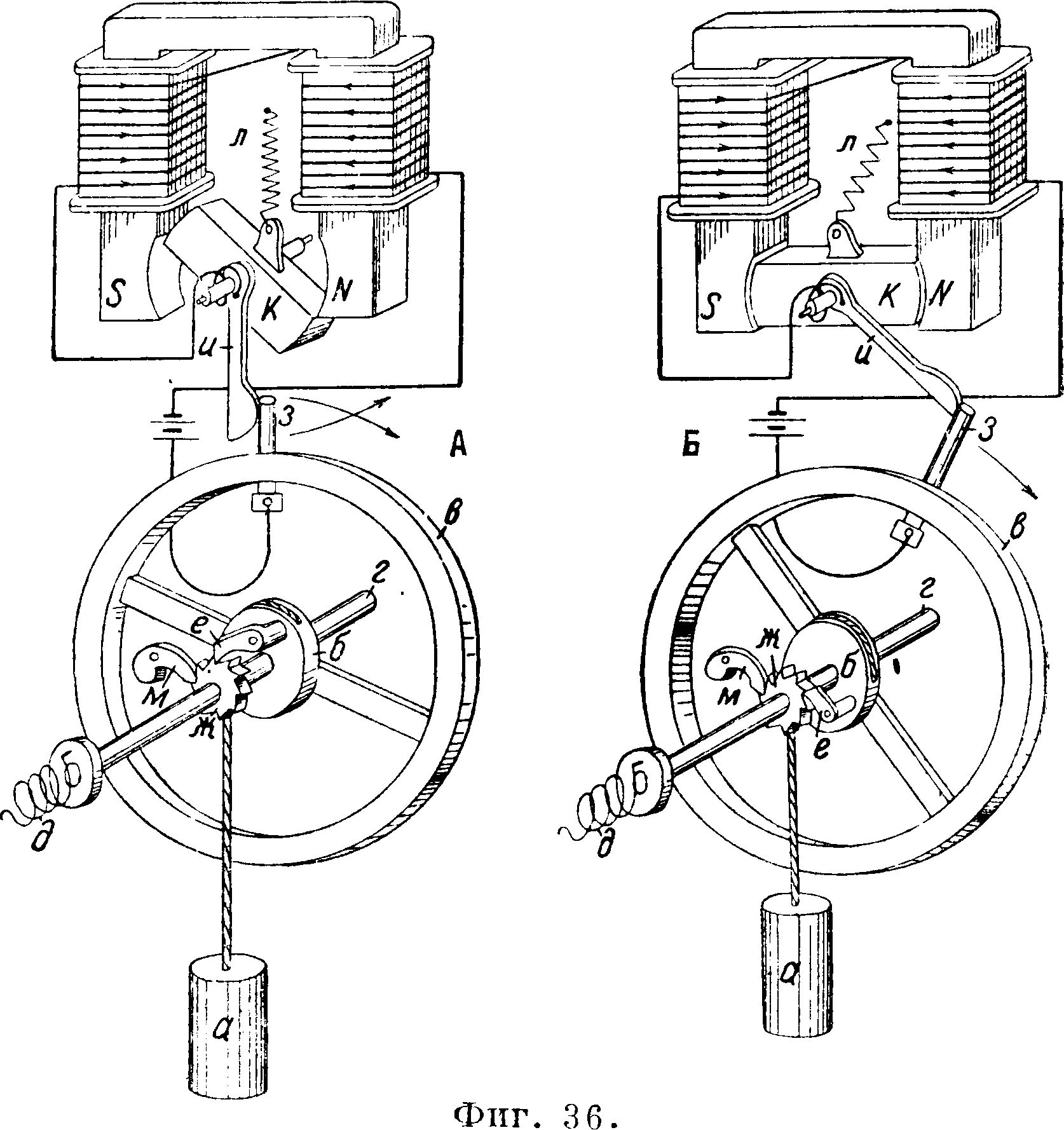
Электроцейт (фигура 36,А). В этом заводе источником силы служит гиря а, подвешенная на шнурке, намотанном на шкив б. Последний соединен наглухо с маховиком в и насажен свободно на ось г, которая посредством пружины д приводит в действие часовой механизм. При опускании гири маховик вращается против часовой стрелки, захватывая собачкой е храповик ж и поворачивая т. о. ось г до тех пор, пока штифт з не коснется рычага и, связанного с якорем к электромагнита SN. Прикосновение рычага и к штифту з замыкает ток батареи, якорь притянется полюсами, как это изображено на фигуре 36, Б,
и рычаг и с силою толкнет штифт з, вследствие чего маховик быстро повернется вправо и под действием своей живой силы поднимет гирю а, ’ после чего ток разомкнется и якорь к станет под действием пружины л в положение, указан-
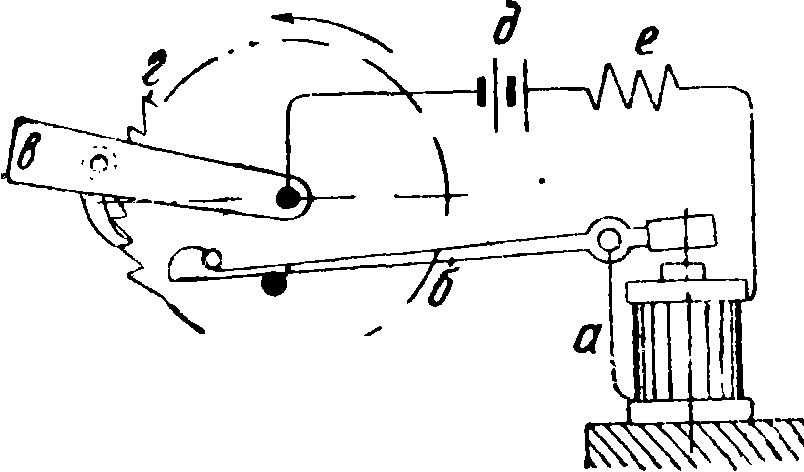
Фигура 37.
ное на фигуре 36, А. Собачка м не дает возможности храповику ою на оси ‘ г поворачиваться при заводе вправо. В течение времени завода действует спиральная пружина д, отдающая накопленную в ней энергию, т. о. действие этого завода непрерывно.
В заводе Рифле р а (фигура 37) электромагнит а при помощи рычага б, соединенного с ого якорем,подбрасывает вверх в е с о в о и р ы-*ч а г в, к-рый своей собачкой действует на храповик г, сидящий на оси промежуточного колеса. При опускании рычага в вниз происходит замыкание тока батареи д на электромагнит, и рычаг подбрасывается вверх. Для регулирования силы электромагнита и т. о. высоты подбрасывания рычага в служит переменное сопротивление е. Этот завод применяется в самых точных Ч. фирмы С. Рифлер. В последние годы в качестве часовых механизмов стали применять
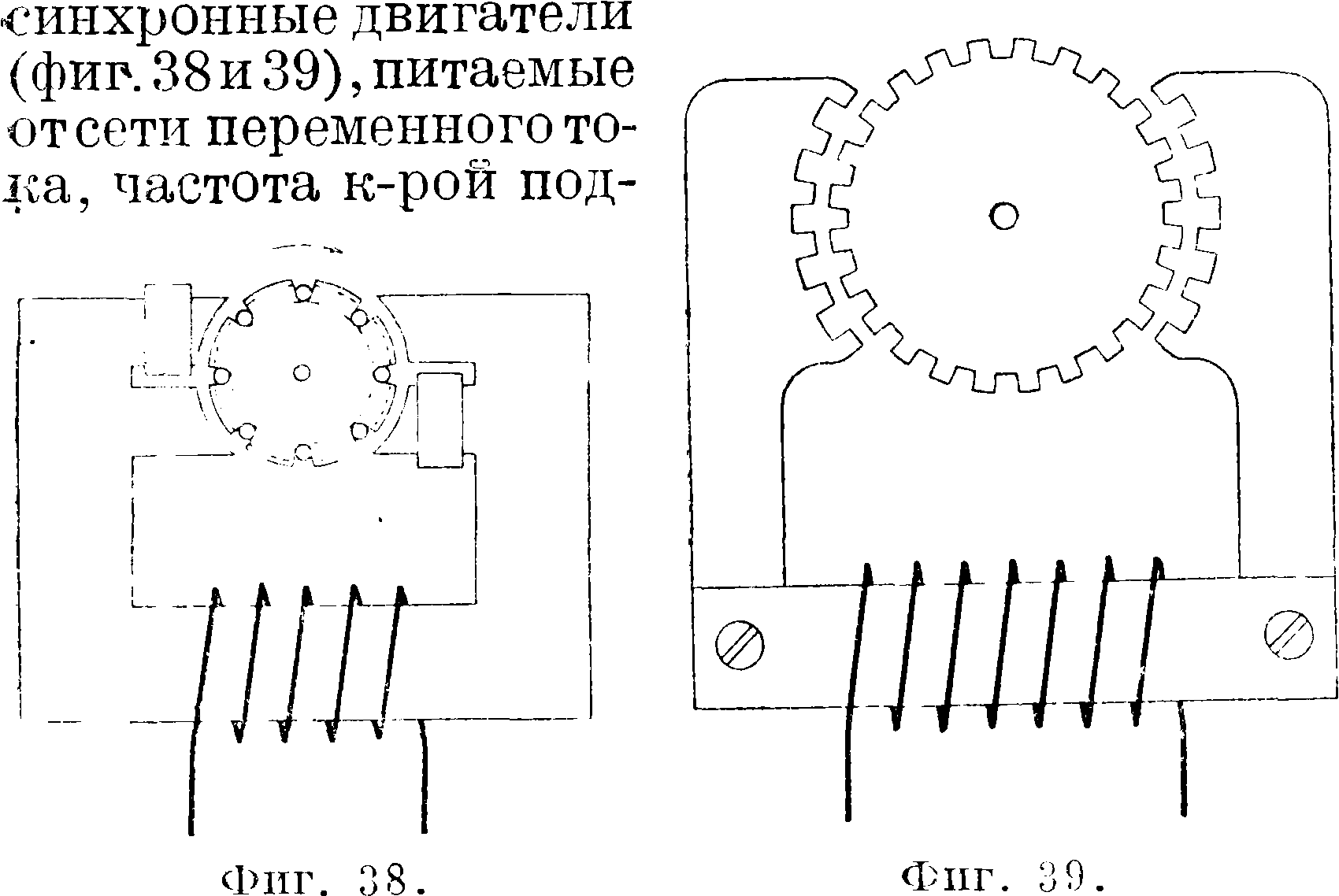
держивается постоянной. Число оборотов тако-
60
го двигателя определяется выражением п— р,
где??,—число об/м., /—частота и р—число пар полюсов» Двигатель, изображенный на фигуре 38, имеет 1 пару полюсов; он будет делать при== 50 Hz 3 000 об/м. Для удобства пуска он снабжен пусковыми короткозамкнутыми красномедными пряжками и после включения уже через 1/2з6 приобретает нормальную скорость. Другой двигатель этого рода (фигура 39) снабжен двенадцатою парами полюсов и более прост и дешев по устройству, но нуждается для пуска в предварительном раскручивании от руки. Потребляют такие двигатели от 2 до 4 W электрической! энергии и работают очень надежно, по правильность хода синхронных Ч. всецело зависит от постоянства частоты питающего их переменного тока.
В тех случаях, когда в пределах одного определенного участка (таковым является завод, больница, школа, вокзал, ж.-д. узел и тому подобное.) необходимо установить единое время, то есть согласовать показания Ч., размещенных в данном участке, с одними образцовыми (главными, или маточными, Ч.), применяется э л е к т р о ч а с о-ваяустановка для распределения времени. В этой установке центральное место занимают главные ‘Ч., посылающие каждую минуту (иногда у2 мин. или каждую ск.) импульс тока от аккумуляторной батареи в сеть вторичных Ч., которые по получении этого импульса передвигают свои стрелки на 1 минуту (30 ск. или 1 ск.) вперед. Вторичные Ч. не являются часовым механизмом в полном смысле этого слова, они в большинстве случаев представляют собою поляризованные электромагнитные счетчики числа импульсов, лишенные завода, хода и регулятора, но снабженные общепринятым циферблатом и стрелками. Опыт показал, что поляризованные механизмы, то есть работающие от тока, изменяющего свое направление на обратное каждую минуту, лучше и надежнее работают, чем неполяризованные, и в современных вторичных Ч. на континенте Евро-пы применяют исключительно поляризованные механизмы, в Англии и Америке встречаются и неполяризованные вторичные Ч. Схема механизма первичных Ч., служащих для посыдки токов переменного направления, изображена на фигуре 40. Кулачок а в конце каждойминутыделает1/2 оборота, поворачиваясь от часового механизма; при этом он отжимает одну из пружин б или вот контактной колодки г. в результате чего происходит посылка тока по проводам д в течение 1—2 ск. во вторичные Ч. По проводам е производится зарядка аккумуляторной батареи ж от осветительной сети или выпрямителя. Сопротивление з, включенное перед колодкой г, служит для предупреждения короткого замыкания батареи в первый момент прикосновения кулачка а к пружинам б или с.
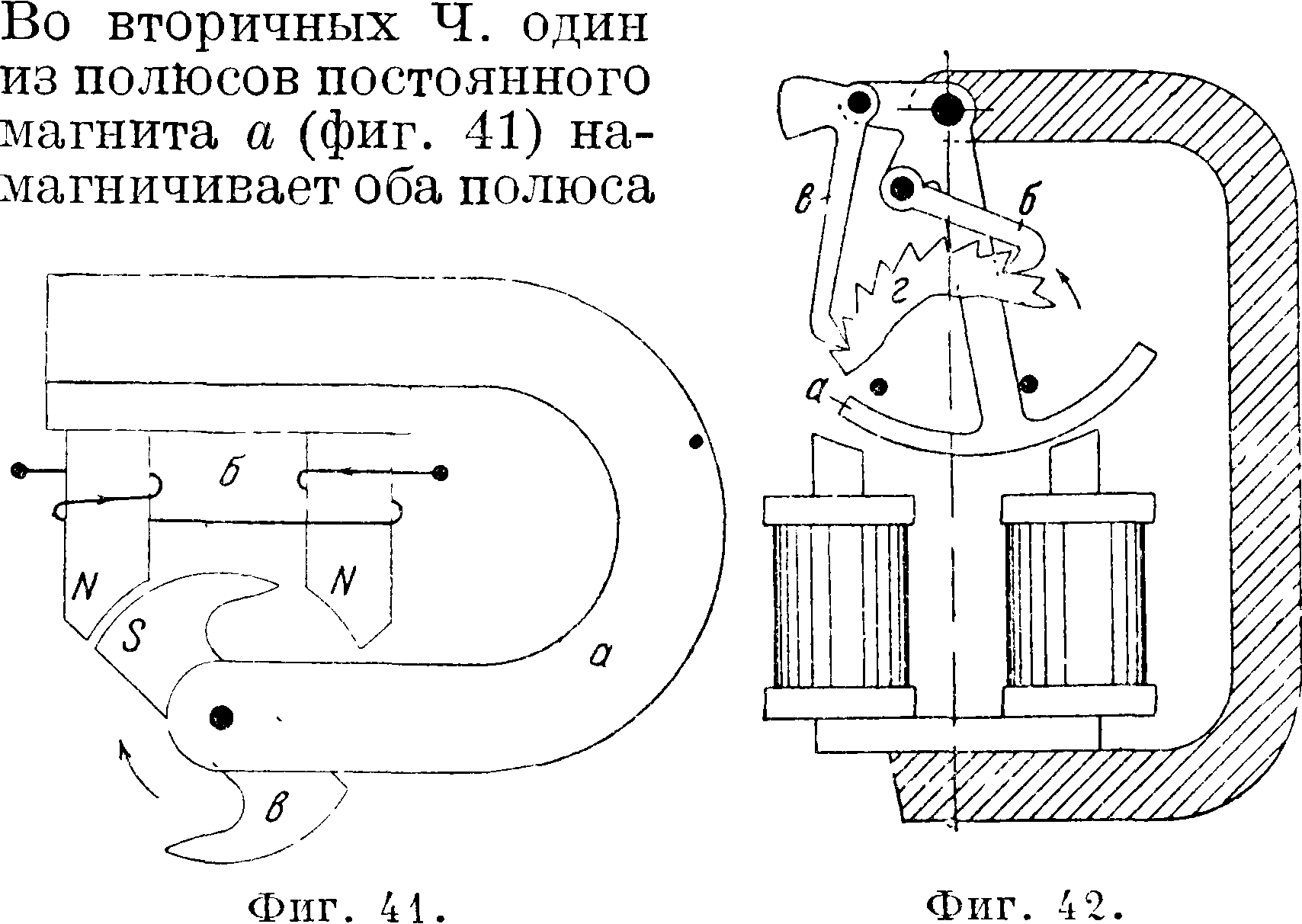
электромагнита б северным, а вращающийся перед ним Z-образный якорь в—южным магнетизмом. При посылке токов переменного направления один из полюсов электромагнита усиливается, а другой ослабляется попеременно, в результате чего при каждом импульсе якорь в поворачивается на У4 оборота. Если на ось якоря насадить трибку с 8 зубцами и сцепить ее с колесом в 120 зубцов, то последнее будет делать (при минутном импульсе) ровно один оборот в час, то есть будет средним, или минутным, колесом вторичного механизма. Сопротивление катушек электромагнита обычно колеблется от 400 до 1 000 Q и выбирается в соответствии с
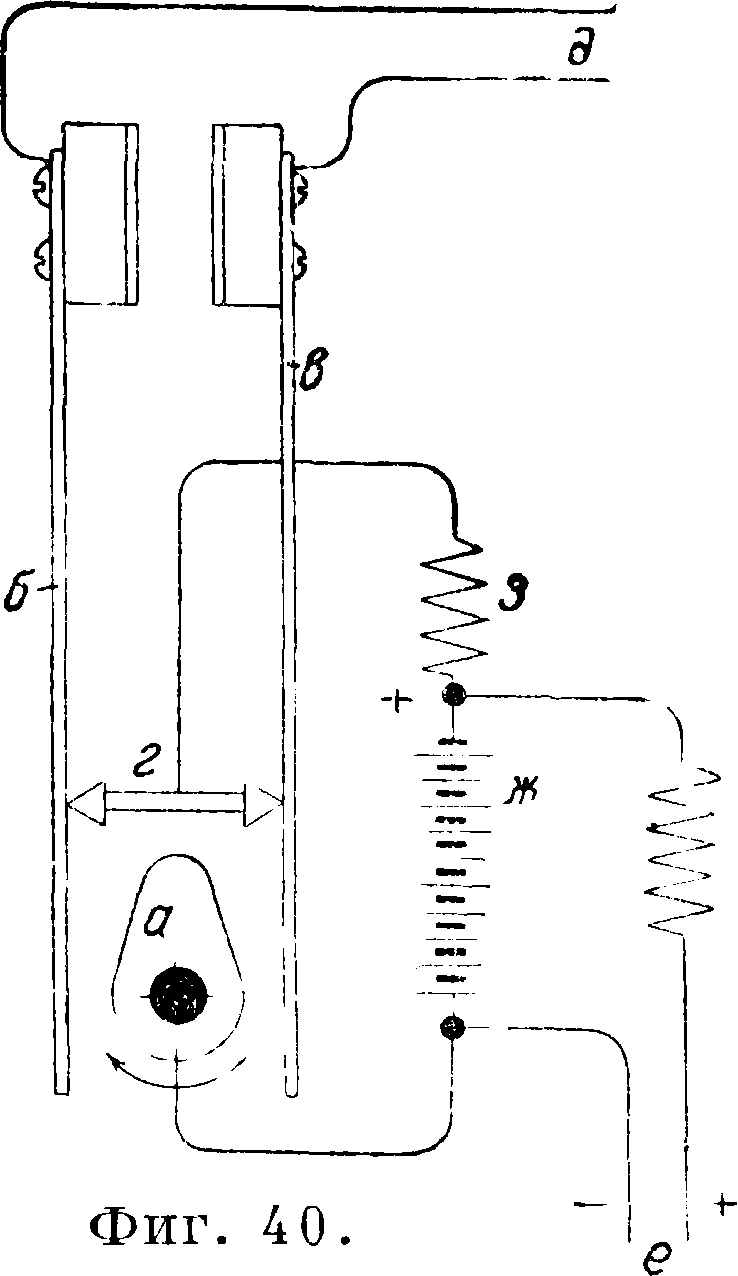
длиной линии вторичных Ч. и напряжением батареи маточных Ч. На фигуре 42 изображены схематически вторичные Ч. с качающимся якорем, в электрическом отношении идентичные с вышеописанными часами. Якорь а здесь соединен с двумя собачками б ив, передвигающими при каждом качании храповое среднее колесо г. Особенно ценным и удобным оказалось применение электрич. тока в точной хронометрии; только при помощи электромагнитного механизма, например изображенного на фигуре 37, оказалось возможным заводить Ч., заключенные в герметически закрытый футляр при постоянном давлении.
Особенно большая точность и постоянство хода были получены в последнем десятилетии В. X. Шортом в Ч., предложенных им и построенных по совершенно новому принципу. Основной мыслью Шорта является освобождение маятника главных Ч. от какой бы то ни было механич. работы, как бы мала и ничтожна она ни была; вся вспомогательная работа выполняется другим вспомогательным или по терминологии Шорта рабским маятником. На фигуре 43 представлена схема Ч. сист. ж тый рычаг с поворачивающийся под действием своего веса против часовой стрелки и сообщающий совершенно аналогичным с описанным выше способом импульс свободному маятнику а. В совершенно определенном положении маятника а контактная пружина ж замкнет цепь обмоток электромагнита у. При этом, как описано выше, рычаг с будет возвращен в исходное положение и кроме того будет послан импульс тока в первичные контрольные часы ф и в обмотку синхронизирующего ко ррекционного тромагнита х. Последний
Фигура 44.
ΊΤ
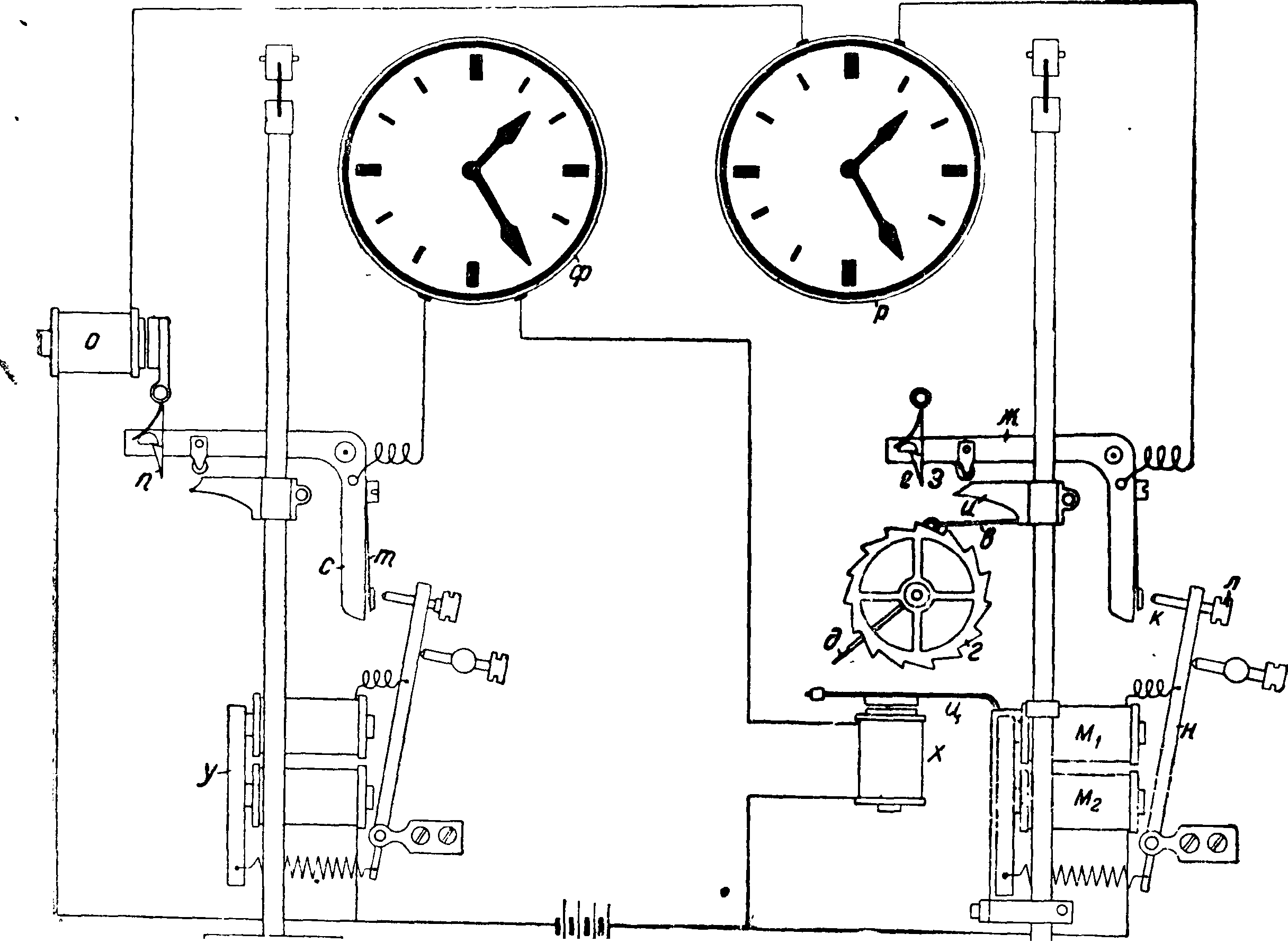
ок:
480 240
| a | 6 | |
| Фигура 43. |
Шорта, где левый маятник а является свободным маятником, а правый б—рабским. При качании рабского маятника собачка в поворачивает колесо г, к-рое при помощи пластинки д освобождает защелку е; при этом коленчатый рычаг ж падает и, скользя роликом з по наклонной плоскости и, укрепленной на штанге маятника, сообщает рабскому маятнику импульс. Вместе с тем одновременно замкнется контакт между пружиной к и винтом л, что повлечет за собой возбуждение катушек мг, м2электромагнита, притягивание якоря и и возвращение рычага ж в исходное положение, где он задерживается защелкой е. Последовательно с обмотками ми м2 электромагнита включены вторичные Ч. р и все вторичные Ч. линии и кроме того электромагнит о защелки п свободного маятника а, которая при прохождении тока через электромагнит освободит коленча-
элек-(фигура 44) притянет свой якорь ц, который упрется в острие ускоряющей пружины ч, укрепленной на штанге рабского маятника б, и ход последнего т. о. будет исправлен импульсом, сообщаемым свободным маятником. Рабский маятник регулируется так, чтобы правые Ч. без коррекции отставали в сутки примерно на 6 ск. по сравнению со свободным маятником. Отставание на 6 ск. в сутки соответствует отставанию на ск. за полминуты, т. ч. при ускоряющем действии пружины в 2 «
за полминуты и работе ускоряющей пружины однажды в минуту разность фаз обоих маятников не превзойдет ~
ск. В таком случае, если отставание рабского маятника будет не больше 12 ск. в сутки .удовлетворительная работа коррекционного электромагнита (синхронизатора) будет обеспечена, и рабский маятник будет постоянно контролироваться свободным маятником. Свободный маятник с электромагнитами о и у ус^· танавливается отдельно в герметически закрытом метал-лич. футляре, давление внутри которого не превышает 15 миллиметров рт.ст.при постоянной Г,а рабский маятник вместе со своими электромагнитами и вторичными Ч. устанавливается в деревянном корпусе в удобном и доступном для наблюдения месте, т. к. он не нуждается в специальной установке. Промежуток ок. у4 ск. между перебросами стрелок в обоих вторичных Ч. ф и р служит признаком исправной работы установки. По свидетельству проф. Симпсона из англ, королевской обсерватории «часы Шорта являются наилучщими из всех Ч.* к-рыми когда-либо располагала обсерватория».
Лит.: Шишелов Л., Механика часового механизма, ч. 1, М.—Л., 1931, ч. 2, М.—Л., 1933; Канн Г., Практическое руководство по часовому делу, ч. 1—2, М.—Л., 1932; В о n a s s e Н., Pendule, Spiral, Diapason, t 1—2, P., 1920; Sander W., Die Uhrenlehre, Lpz., 1923; Rupert T., Gould R., The Marine Chronometer, Its History a. Development, L., 1923; Gross-m a η ή J. et H., Horlogerie th^orique, t. 1—2, 1911—12; Andrade J., Horlogerie et chronom6trie, P., 1924; Bock H., Die Uhr, Grundlagen u. Technik d. Zeitmes-sung, Lpz.—B., 1917; Z a c h a r i a s .T., Elektrotechnik f. Uhrmacher, B., 1920; Krumm G., Die elektrischen
27
T. Э. m, XXV.
Uhren, в книге: Saunier Ch., Lehrbuch. d. Uhrma-cherei, B. 2, Lpz., 1914; Favarger A., L’61ectricit6 et ses applications к la chronom6trie, Neuchatel, 1924; -К г u m m Gr., Lehrgang f. den technischen Fachzeichen Unterricht des Uhrmachers, В. 1, Text, B. 2, Atlas, Lpz., 1925. Л. Шишелов.