 > Техника, страница 93 > Эйлера уравнения
> Техника, страница 93 > Эйлера уравнения
Эйлера уравнения
Эйлера уравнения, ур-ия, встречающиеся в различных отделах математич. анализа, теоретической и прикладной механики, гидродинамики ит. п. и установленные впервые великим математиком Эйлером. Важнейшими из них являются нижеследующие ур-ия. В мате-
м а т и к e. 1) Диференциальное ур-ие следующего вида:
αόχ
dny
dxn
-f- (ΧχΧη
dn~)y dxn~ i
+ a2xn 2
dn~*y dxn~ 2
+
+. + an-ix ^ + ипУ — (1)
где α0, αχ, α2, ., —нек-рые постоянные. Пусть имеется, с другой стороны, алгебраич. ур-ие: ап + + «я-2^ (* - 1) +
+. + α0ζ (ζ — 1) (ζ — 2). (ζ — η + 1)=0. (2) Если ζμ— какой-либо корень ур-ия (2), то частным интегралом ур-ия (1) будет
У μ=ΟμΧ~ΖΡ (μ=1, 2,., η), где Сμ—произвольные постоянные. Если все корни ур-ия (2) различны, то общий интеграл ур-ия (1) будет п
у=Ci®*1 + CZXZ* +. + CnXZn=2 ΟμΧΖΡ.
μ=1
Если из числа п корней ур-ия (2) ν корней равны между собой, т. ч.
ζ1=ζ2=.=ζν=ζ,
а остальные корни различны, то общий интеграл ур-ия (1) будет равен у=[С0 + С1]пх-{-С2(1пх)2 +. + Cv(lnx)v] xz -f + Cv+l xzv+1 +. + CnxZn.
2) Равенства, или ф-лы, Эйлера соз х -f г sin х=егх ( cos х — г sin х=е~2Х f
получаемые разложением
ный момент), то ω =
в ряды тригонометрии. и показательных ф-ий (смотрите Дифференциальное исчисление).
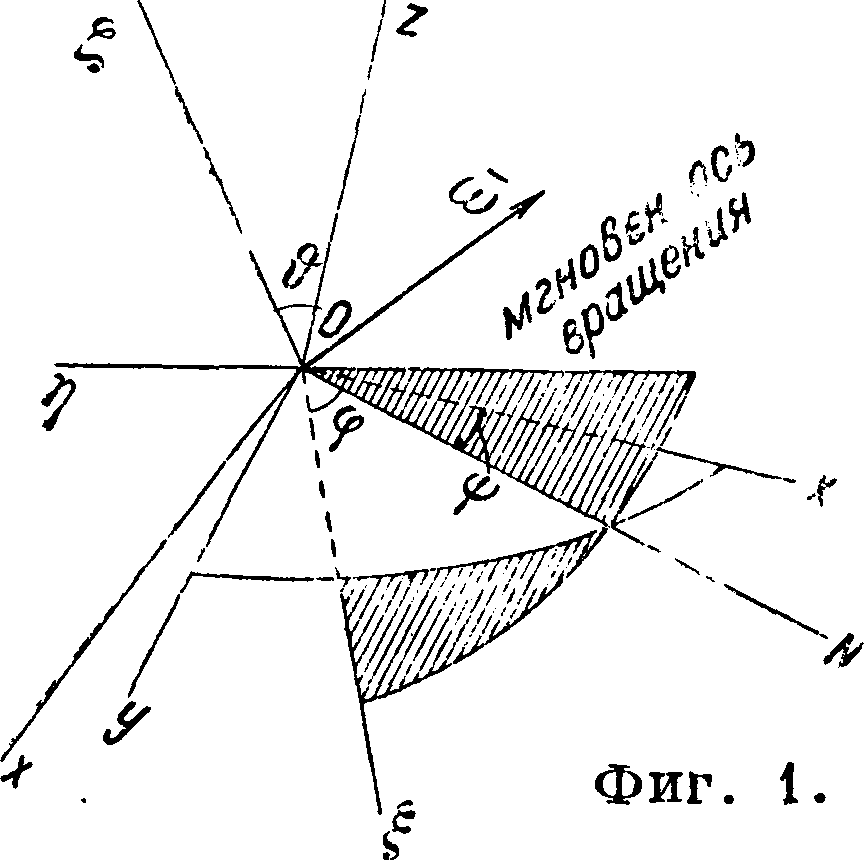
В теоретической механике. Если тело вращается вокруг неподвижной точки О с угловой скоростью, вектор которой равен со (линия действия вектора совпадает с мгновенной осью вращения вдан-*i + со2 + (о3, причем #. dy>
7’ ω·3 “ dt ’
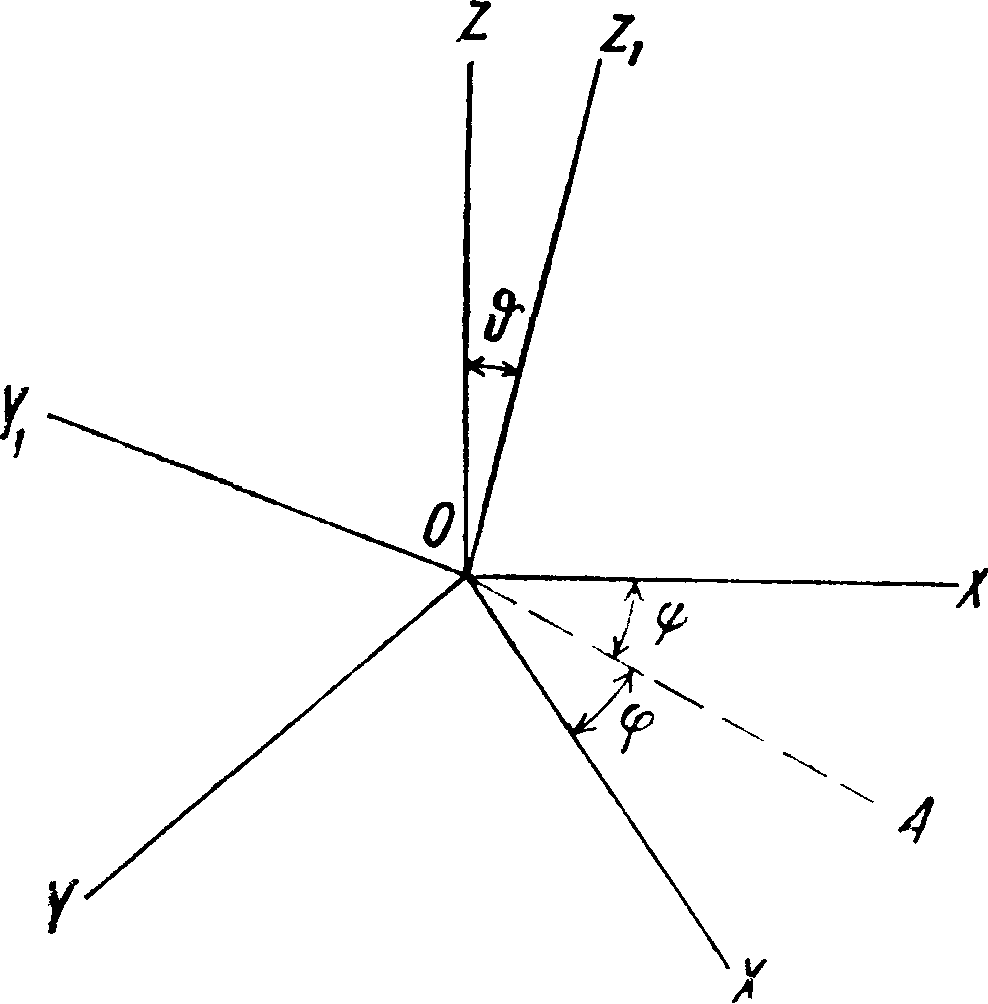
где ωΐ9 со2, cog — компоненты по направлениям С, ΟΝ. z (фигура 1 и 2), а φ, гр и #—эйлеровы углы (смотрите). В свою очередь спроектируем векторы ооь со2, со3 на оси ξ, η, £, обозначив компоненты векторов по этим осям соответственно через ри qif rx р2, q2, r2 pz, q9, г3; при Этом получаем непосредственно:
Ρι=0; 2ι= 0; 4 =
d9 d».. n
p2=^co$φ; g3=-ssmf, r2=0.
Вектор же ω3 разлагаем в свою очередь предварительно по направлению оси С и по перпендикулярному к этой оси направлению, то есть по направлению, перпендикулярному к прямой ON, после чего получаем:
P3=-^sin#sm9>; q3=^ sin ϋ соз ψ. r3=^cos&.
T. к. проекция равнодействующего вектора на какую-либо ось равняется сумме проекций со ставляющих вектора на ту же ось, то имеем, обозначая проекции ω на оси £, η, ζ через V, i, г:
P=Pi + Pi + Pi=™C0S<P + ^ySin 0 sin φ,
2=2i + 2a + 2з=~^ sin Ψ + 37 sin & cos Ψ r=ri + r3 + r3=cos 0.
Это—кинематич. ур-ия вии с этим имеются еще ющие динамич. закон движения твердого тела около своей неподвижной точки. Допустим, что такое тело находится под воздействием внешних сил JFV F2,Fi4., точки приложения которых определяются относительно точки О радиусами - векторами гг, г,. Возьмем,
Эйлера. 3 ур-ия,
В соответст-устанавлива-
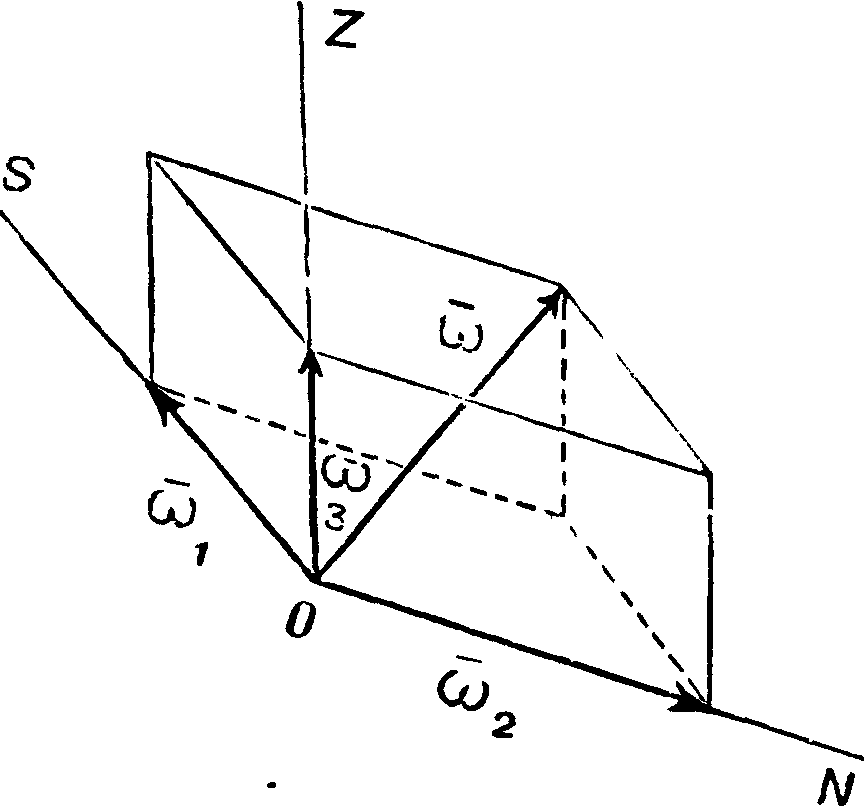
Фигура 2
какой-либо элемент тела, массак-рого равна dmitк которому приложена внешняя сила и равнодействующая всех внутренних сил ^-.Применяя к этому элементу теорему моментов (смотрите Механика теоретическая), имеем, обозначая моменты сил Fj и Fi относительно О через Mi и Ж ·:
d · г
Mi + JM t=[Fi · η·] + [Fi · г {= ж [dm/vpi]
где Vi—векторная скорость элемента. Т. к. сумма моментов всех внутренних сил относительно какой-либо точки равна нулю, то
М — 2 -М"е=f Jt ldmi virA - J где M—главный моментный вектор системы внешних сил относительно О; интеграл в правой части взят по всему объёму тела. Проектируя обе части последнего равенства на ось х и опуская индексы, имеем
M.-S Л™ уШ~гжф
С другой стороны, имеем г? — [cor]
и следовательно:
νχ=-άΤ=ω2Ζ-ω*ν,
dv
νν=1ϊ=ω3χ-ω1ζ,
dz
dt
-=coxy — ω2Χ.
Взяв вторые производные, получаем
Мх=J dm (у2 -f z2) + ω2ω3 {у2 — z2) 4-
+ 2^’ Уе> Ζχ^=ΊΓι J dm № + +
+ ω2 ω3 J dm (Уг - z°-) + J dm У2 ΖΧ)·
Так как
J dm (у2 + .г2)=Ιχ; J (?/2 - ^·2)=~ ly*
где Ix, Iу и Iz—моменты инерции тела относительно осей ху у, ζ, то м,=14?+ е.
+ J* dm 2 г (ХУ> У09
Если за неподвижрше оси взять мгновенное положение главных осей инерции тела относите ль-
но точки О, то последний член равенства, как представляющий сумму центробежных моментов инерции тела относительно главных осей, будет равен 0 (смотрите Моменты инерции). Применяя при этом прежние обозначения для про-екций угловой скорости, имеем:
Ix^ + (Ie-Iy)qr=MX!
ItJ^ + (Ix-L·) rp=My,
^% + {ΐυ~Ι,)να=Μι.
Это—динамич. ур-ия Эйлера (смотрите Прецессия).
В гидродинамике ур-ия Эйлера определяют аналитич. условия движения жидкости и в частности условия ее равновесия.
Помимо вышеприведенных Э. у. имеется еще целый ряд ур-ий, которые были впервые выведены другими лицами, исходившими из тех или иных положений, установленных Эйлером, например уравнение Эйлера-Пуассона, Эйлера-Са-
Вари И Т. Д. М. Серебренников.
Лит.: см. Механика теоретическая и Гидродинамика.