 > Техника, страница 94 > Электрон
> Техника, страница 94 > Электрон
Электрон
Электрон, частица материи, обладающая наименьшим отрицательным электрическим зарядом и представляющая одну из тех основных структурных единиц, из которых построены материальные тела. Название «электрон» впервые предложил Стони (1891) С1]. Представление об атомном строении электричества встречается впервые повидимому у Гельмгольца (Лондонская речь Гельмгольца в 1881 г.) [2]; тот взгляд, что катодные лучи, возникающие в разрядных трубках с разреженным газом, состоят из электронов, получил всеобщее признание лишь к середине 90-х гг. (впрочем гипотеза о том, что катодные лучи состоят из частиц, входящих в состав атомов, была впервые предложена еще Круксом [3] в его шеффильд-ском докладе в 1874 г.). После опытов Резерфорда над рассеянием α-частиц атомами (1911 год) стало общепризнанным, что материальные тела состоят из атомных ядер и окружающих эти ядра Э.; при этом обыкновенно высказывалось и то предположение, что Э. наряду с более тяжелыми частицами входят и в состав ядер (об этих «внутриядерных» Э. смотрите ниже).
Заряд и масса Э. Важнейшими характеристиками Э. являются его отрицательный заряд «е» и его масса «ш» (измеренная наблюдателем, по отношению к которому скорость Э. гораздо меньше скорости света). Величины е и ~ неоднократно определялись на опыте.
С экспериментального материала, полученного до 1929 г., дана в статье Бёрджа [4]; новые появлявшиеся с тех пор работы внесли новое только в вопрос об но не в вопрос об е. Наиболее вероятным значением заряда Э. является е - (4,770 ± 0,005) · 10*10 CGSE.
Это значение основано: 1) на измерениях заряда отдельных ионов на масляной капельке (метод Милликэна), 2) на абсолютных измерениях длины волны рентгеновских линий (эти измерения дают абсолютные значения кристаллических постоянных, а это позволяет вычислить число Авогадро, откуда с помощью постоянной Фарадея находят е). Наиболее новыми и надежными измерениями величины ~ являются следующие: Кэмпбелл и Хаустон [5] в 1932 г. на основании измерений эффекта Зеемана находят (1,7579 ± 0,0025) · 107 CGSM. Этот результат в общем находится в согласии с другими «спектроскопическими» измерениями. В 1933 г. Дэннингтон и Кречмар на основании измерений отклонения пути Э. в магнитном поле находят, что ^ равно (1,757 + 0,0015) ·
• 107 согласно первому из них [®] и (1,7570 + ±0,0026)· 107 согласно второму [7]. Наиболее тщательное из предыдущих измерений, произведенных по методу отклонений (Ф. Вольф,
1927 г.)[8], давало для ~ большее значение, а именно (1,7679 ± 0,0018) · 107, что заставило Бёрджа считать, что спектроскопич. значение
~ почему-то систематически меньше, чем значение «по методу отклонений». Сопоставляя наиболее надежные из недавних измерений (Хаустон, 1927, по тонкой структуре; Бэбкок, 1929, и Кэмпбелл-Хаустон, 1932, по эффекту Зеемана; Перри и Чэффи, 1930, и Кирхнер, 1932, по методу линейного ускорения; Дэннингтон, 1933, по отклонению в магнитном поле), Дэннингтон считает, что наиболее надежным значением в настоящее время является — =
= (1,7598 + 0,0005) · 107 CGSM, откуда вытекает [принимая по Бёрджу для скорости света значение (2,99796 ± 0,00004) · 1010 см/ск] следующее значение «покоящейся массы» Э.: т== (9,041 + 0,012)· 10-28 г.
Электрон в классической электродинамике [Л10,11]· Вслед за открытием свободных Э. (в виде Э. катодных лучей и др.) Лоренц нашел такую формулировку микроскопической электродинамики, из которой м. б. выведена макроскопич. электродинамика Максвелла (микроскопии, электродинамику Лоренц называл «электронной теорией»). Введением своего «специального принципа относительности» Эйнштейн завершил построение классич. электродинамики, которая т. о. стала вполне консеквентной теорией, включающей в себя как частный случай (когда скорости частиц малы по сравнению со скоростью света) классическую механику. Классич. электродинамика основана на резком разграничении объектов внешнего мира на две категории: заряженные частицы и электромагнитные поля. Такое разграничение однако не может считаться в точности соответствующим природе вещей и поэтому должно рассматриваться лишь как приближение; вместе с этим и классич. электродинамика должна рассматриваться как теория, обладающая лишь приближенной применимостью в некоторой определенной области явлений. Это обнаруживается следующим образом: если мы будем считать Э. точкой или припишем ему линейные размеры, заметно уступающие величине ^, то из электродинамики будет следовать, что создаваемое Э. поле обладает массой, значительно превосходящей т. Поэтому Э. необходимо приписать размеры порядка ^, то есть порядка 1(Г13 сантиметров (т. н. классич. радиус Э.). Однако многочисленные попытки (Лоренц и др.) построить в пределах классической электродинамики теорию Э. как протяженного заряда с линейными размерами порядка оказались неудачными по той очевидной причине, что классич. электродинамика не может ввести никаких сил, которые помешали бы Э., состоящему из отталкивающихся друг от друга элементов заряда, разорваться на части. Отсюда следствие: электродинамика, основанная на разграничении понятий «поле» и «заряженная частица», не может разрешить вопроса о структуре Э. и даже объяснить его устойчивость и его существование. Границы применимости такой электродинамики определяются необходимостью рассматривать воздействие на Э. поля, вызываемого самим этим Э.: движущийся с ускорением Э. излучает энергию, что приводит к торможению Э. Расчет, произведенный на основании электродинамики, показывает, что тормозящая сила («реакция излучения») равна v, где v—скорость, а точки обозначают диференцирование по времени. Введение этой силы наряду с силой, происходящей от внешнего поля, приводит однако к физически абсурдным результатам, откуда явствует, что применимость классического понятия поля определяется неравенством то есть условием, что реакцией излучения можно пренебречь. Если движение Э. разложено в ряд Фурье неглавная частота равна v — |, то можно приближенно писать
v=w=I v, откуда вытекает условие применимости классического понятия поля в виде λ > (то есть поле не должно заметно ме няться на расстояниях порядка классич. радиуса Э.; это условие применимо по отношению к системе отсчета, в которой скорость Э. мала). Это неравенство опять характеризует тот факт, что проблема существования,устойчивости и структуры Э. не м. б. решена в пределах теории, оперирующей классич. представлением о поле.
Э. в квантовой теории [12]. Волновая механика (нерелятивистская теория квант) трактует Э. как точечную частицу, состояние которой в каждый данный момент характеризуется (в задаче об одном Э. во внешнем поле) волновой ф-ией, зависящей от четырех переменных: от трех пространственных координат Э.—х, у, ζ—и от одной «спиновой» координаты σ,κ-рая представляет проекцию механического момента Э. на заданную в пространстве ось и может принимать только два значения -f- ^ и —
(где h—постоянная Планка, деленная на 2 л). Одновременно с этим волновая механика приписывает Э. и магнитный момент, равный произведению механич. момента на (это отношение вдвое больше, чем отношение между орбитальным магнитным и орбитальным механич. моментами, согласное с классич. электродинамикой; этот факт получил название «магнитной аномалии спина»). Для систем, состоящих из многих Э., волновая механика утверждает: волновая ф-ия меняет знак при перемене местами четверки координат одного Э. с четверкой координат другого Э. Это т. н. принцип Паули, к-рый в более наглядной и вульгарной формулировке обозначает, что два Э. могут занимать одну и ту же орбиту лишь при условии, что их «спиновые» моменты противоположны друг другу. Возможность принципа Паули основана на том, что все Э. имеют абсолютно одинаковые свойства. Поэтому в волновой механике, в которой отсутствует понятие траектории, невозможно говорить об индивидуальном Э.: электроны «не имеют лица» (индивидуальности). Для задачи многих Э. принцип Паули приводит к особому виду статистики (статистика Ферми). Волновая механика совершенно удовлетворительно объясняет все явления, в которых принимают участие Э., если только их скорости гораздо меньше скорости света. Сюда относится поведение Э. в электронных оболочках атомов и молекул (энергетич. уровни, магнитные свойства атомов и молекул, теория периодической системы, теория химических сил и сил сцепления и т. д.), кроме того явления диффракции Э., поведение Э. проводимости и тому подобное.
Э. в релятивистской теории квант [13,14]. Распространение принципов квантовой теории на явления, в которых играют роль релятивистские электроны (со скоростью порядка скорости света), натолкнулось на трудности; релятивистская теория квант до сих пор (в 1933 г.) не построена. Характерным свойством этой будущей теории является то, что в ее ф-лах должны фигурировать обе постоянные: квантовая (/г) и релятивистская (с). Теория должна будет объяснить значение величины
he -
—, которая является безразмерным числом,
равным по Бёрджу 137,29 ± 0,11; иными словами, это число должен быть существенным элементом теории. Это значит, что релятивистская теория квант должна объяснить дискретный характер электрич. заряда, то есть разрешить проблему существования и устойчивости Э.; она же должна придать определенный смысл вопросу о структуре Э. и дать на этот вопрос ответ. Типичным примером физич. проблемы, подлежащей ведению этой будущей теории, является проблема ядерных Э. Тот факт, что при ^-распаде из ядра вылетают электроны, заставил физиков считать Э. составной частью ядер
(традиционная гипотеза говорит: ядро состоит из Э. и протонов). Однако размеры ядра (<1СГ12 см) заставляют приписать внутриядерному Э. неопределенность в импульсе, значительно превышающую тс; это указывает на то, что проблема поведения Э. в ядре принадлежит релятивистской квантовой теории. Необходимость упаковать несколько десятков Э. в пространстве с линейными размерами порядка классич. радиуса Э. также указывает на то, что решение проблемы ядерных Э. невозможно без предварительного решения проблемы о структуре Э. А т. к. в будущей теории, которая разрешит эту проблему, противоположность между Э. и полем потеряет даже приближенное значение, то ясно, что в настоящее время мы даже не знаем, каков точный смысл вопроса о том, имеют ли Э. в ядре самостоятельное существование или нет.
В настоящее время мы обладаем лишь предварительным наброском релятивистской теории квант в виде теории Дирака, которая по отношению к будущей теории является видимо чем-то вроде начала разложения в ряд по степеням заряда Э., или, точнее говоря,
по степеням малой величины. С таким
V he
характером теории Дирака связано и то, что в ней неизменно возникают трудности при введении взаимодействия между Э., к-рое очевидно соответствует каким-то неучитываемым теорией членам второго порядка. Не обладая т. о. вполне определенными границами применимости, теория Дирака однако приводит к частичным, весьма значительным успехам. Ее характерной чертой является то, что в ней фигурируют состояния Э. с отрицательной кинетической энергией. Так как такие Э. никогда не наблюдаются, то Дирак предполагает, что состояния с отрицательной кинетич. энергией сплошь заняты Э.; эти Э. т. о. образуют однородный и поэтому ускользающий от наблюдения фон, на котором разыгрываются физич. явления. Только отступления от однородности этого фона, если они возникают, вызывают поле, сам же фон не вызывает поля. Точка зрения Дирака блестяще подтвердилась в 1932—33 гг., когда были открыты позитроны (положительные электроны), которые ведут себя повидимому как «дырки», возникающие в однородном фоне Э. с отрицательной кинетич. энергией при выдергивании оттуда Э. В полном согласии с теорией находится тот факт, что в присутствии ядер может происходить поглощение у-лучей с образованием «пары» (позитрон + электрон); повидимому происходит и обратный процесс уничтожения электрона и позитрона с испусканием у-лучей (аномальное рассеяние Грея и Тэррента). Из теории Дирака вытекает также, что присутствие внешних неподвижных зарядов (Э. и ядер) вызывает в сплошном фоне Э. с отрицательной энергией такую деформацию (поляризацию), что возникающее вследствие этого нарушение однородности такого фона вызывает в пространстве поле, уменьшающее на поле самих внешних зарядов. В случае зарядов быстро движущихся, а не неподвижных, такого частичного экранирования заряда согласно Дираку не происходит. Отсюда Дирак заключает, что измеренный на опыте заряд Э. не есть его настоящий заряд,
136
а только настоящего заряда; в явлениях же, связанных с очень быстрыми Э. (рассеяние быстрых Э. ядром, эффект Комптона с очень жесткими квантами), должен сказаться настоящий заряд Э. Этот удивительный результат теории еще не проверен на опыте. Остается пока открытым вопрос о том, не представляет ли этот теоретич. результат пример незаконного распространения теории Дирака на явления более высокого порядка ^в смысле разложения по степеням —на объяснение к-рых
Yhcj
эта теория все равно не рассчитана.
Лит.: *) S t о и е у (К, «Trans, of the Royal Society of Dublin», 1891, Serie 2, v. 4, p. 563; 2) Helmholtz H., v., Vortrage u. Reden,B. 2, p. 251, Brschw., 1396; 3) Croo-k e s W., «Philos. Transactions», 1879, Part 1. p. 135, Part 2, p. 641; 4) в i r g e R., Probable Values of the Physical Constants, «The Physical Review», 1929, Supplement, v. 1; e) C a m p b e 1 1 J. a. Houston W., ibid., 1932, v. 39, p. 601; «) D u η n i n g t ο n F., ibid., 1933, v. 43, p.404;7)Kretschmar Gr., ibid., 1933, v. 43, p. 417; δ) Wolf F., «Annalen d. Phys.», Lpz., 1927, B. 83, p. 849; s)Lorentz H., Versuch einer Theorie d. elek-trisehen u. optischen Erscheinungen in bewegten Kcrpern, Leiden, 1 895; ·ο) LorentzH., Theory of Electrons, Lpz., 1909; n) Bohr N., Faraday Lecture, «Journ. Qf the Chemical Society», L., 1932, February; 12) Дирак П., Основы квантовой механики, пер. с англ., М.—Л., 1932; *3.) Bohr N., «Journ. of the Chem. See.», L., 1932; 14) Dirac P., Theory of the Positron (доклад, читанный 27 еент. 1933 г. на Всесоюзной ядерной конференции в Ленинграде, еще не опубликован). М. Бронштейн.
^ЭлектронАВИГАЦИОННЫЕ ПРИБОРЫ, приборы, служащие целям судовождения, навигации (смотрите), в которых движущей или передающей сигналы силой является электричество. Основным Э. п. является гироскопич. компас, заменяющий магнитный судовой компас (смотрите); от него приводится в действие ряд приборов—курсо-граф, одограф, гирорулевой,—облегчающих и механизирующих дело управления кораблем. Электрифицированы также приборы, указывающие скорость и пройденный путь судна— лаги (смотрите), — и приборы, служащие для измерения глубин—лоты (смотрите).
Гироскопический (жироскопический) компас (гирокомпа с)—навигационный прибор, механически указывающий направление истинного меридиана; применяется на современных судах наряду с магнитным компасом, но по свойствам отличается от последнего. Как прибор чисто механич. гирокомпас не реагирует на магнитное поле, создаваемое судовым железом, поэтому. м. б. установлен на железных и стальных судах, где вследствие значительности и непостоянства магнитного поля работа магнитного компаса становится ненадежной. По этой же причине гирокомпас м. б. установлен в нижних защищенных помещениях корабля, а в постах управления устанавливаются электрич. повторители—к о м п а с ы-у казатели. Наличие на корабле нескольких (обычно 3) гирокомпасов дает возможность контроля их работы. Значительная величина периода колебаний компаса делает его чрезвычайно устойчивым в меридиане, дает возможность лучше удерживать корабль на курсе, сокращает число оборотов машины на пройденную кораблем милю и увеличивает скорость корабля. Применение вместе с гирокомпасом гирорулевого (смотрите ниже) повышает выгоды эксплуатации приборов. Устойчивость гирокомпаса позволяет считать его направление постоянным в течение небольших промежутков времени и применять его в приборах управления артиллерийским огнем. Применяемые для наведения орудий на невидимую цель артиллерийские гирокомпасы дают курсы и пеленги с точностью до 0,1°, а обычные навигационные—до 1/4°. В настоящее время гирокомпас имеет широкое распространение как на военных, так и на торговых судах. Главным недостатком гирокомпасов являются бал-листич. девиации, появляющиеся, когда к кораблю прикладываются ускорения. Исследовательская работа всех фирм направлена к устранению этих девиаций; постоянно появляются новые конструкции, преследующие эту цель. В современных приборах баллистич. девиации при самых неблагоприятных условиях не превышают нескольких (2—3) градусов. Другим недостатком гирокомпаса является сложность его устройства и необходимость иметь специальный обслуживающий персонал. В настоящее время имеются гирокомпасы следующих фирм: Sperry (США), Anschutz (Германия), Brovvn (Англия) и Нага (США). Наиболее распространенным из этих приборов является гирокомпас Сперри.
Теория гирокомпаса. Из основных ур-ий динамики материальной точки
«S-Sn+Sr* ·
«&-Σζ,+ 2ζ, J
(i)
(где т—масса точки с координатами х, у, z Хе, Ye, Ze—проекции внешних сил на оси координат, Xi9 Yu Zt—проекции внутренних сил на те же оси) помножением соответственно первого и второго на у и х, второго и третьего на z и у и третьего и первого на х и z и попарным вычитанием получаем:
т{ХЖ>~У ^)= Σ № - УХ()+ Σ We-yXe), т [1J Ш - S = 2 (yZ< ~ Σ (VZc - ~Ye)’
т{гШ-ХШ)~Х (~Xi ~ xZi) + Σ (zXe-xZe).
Распространяя эти ур-ия на все тело и принимая во внимание, что в этом случае моменты внутренних сил попарно равны и противоположны по знаку, имеем:
Τί Σ т (* ~ У fi)=Σ Σ (xYe - УХе):
ΙίΣ*(^-^=ΣΣ(^-^)
it Σ « (* ft ~х Tt)=Σ Σ (*χ. - xZe)·
Τ. κ. m (xYt — У jj) равно моменту количества движения точки относительно OZ, а Σ (xYe —уХе) равна сумме моментов внешних сил относительно той же оси, то, обозначая момент количества движения через сг, а суммарный момент внешних сил через М, можем последние ур-ия написать в виде:
длх dt
-мя
day
di
= м · —=м
fit
dt
(2)
где индексы х, у, z обозначают проекции на соответствующие оси. Ур-ия (2) м. б. выражены след, обр.: скорость конца вектора момента количества движения равна и параллельна вектору момента внешних сил. Предположим, что мы имеем вращающееся тело с неподвижным центром О (фигура 1), то есть гироскоп с тремя степенями свободы. Пусть его угловая скорость равна ω=~ радиан/ск. и его момент инер ции относительно оси вращения Ох равен J, тогда ax=a=Jo). Если к телу приложен внешний момент Му, стремящийся повернуть тело в плоскости xOz, то скорость но конца вектора и, изображающего момент количества движения, равна Му и сообщит гироскопу вращение вокруг оси Oz, перпендикулярной плоскости, содержащей векторы внешнего момента и момента количества движения; это вращательное движение называется прецессией; его угловая скорость
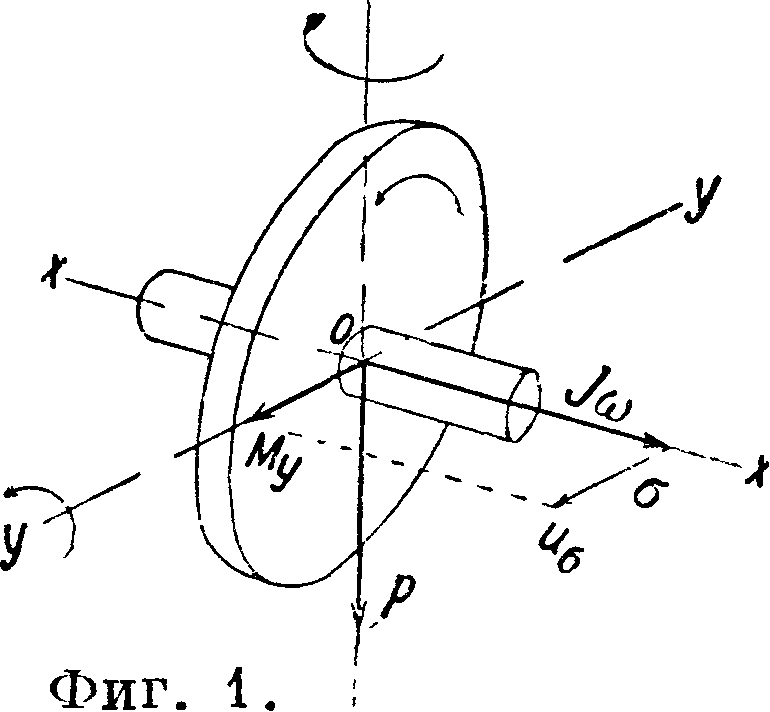
“а М
Р “ У _ jcu
(3)
Т. о. при отсутствии внешнего момента ось гироскопа стремится сохранять положение свое в пространстве неизмен-7 ным. Теоретически это свойство гироскопа могло бы быть использовано для создания компаса, т. к. гироскоп, однажды поставленный осью параллельно оси мира, стремится сохранять это направление, то есть будет указывать на север, но неизбежно возникающие внешние моменты (трение воздуха, трение в осях Цодвесов и т. д.) вызывают прецессионные движения, вскоре нарушающие первоначальное направление оси гироскопа. Для того чтобы гироскоп мог служить компасом, необходимо наличие направляющей с и л ы, то есть силы, стремящейся возвратить
гироскоп, однажды выведенный из северо-южного направления, обратно. Направляющая сила получается путем создания внешнего момента, стремящегося поставить всегда ось гироскопа горизонтально, вопреки стремлению ее, оставаясь параллельной самой себе, принимать под влиянием вращения земли различные углы наклона к горизонту. Момент этот создает прецессионное движение, стремящееся повернуть ось гироскопа в плоскость меридиана.
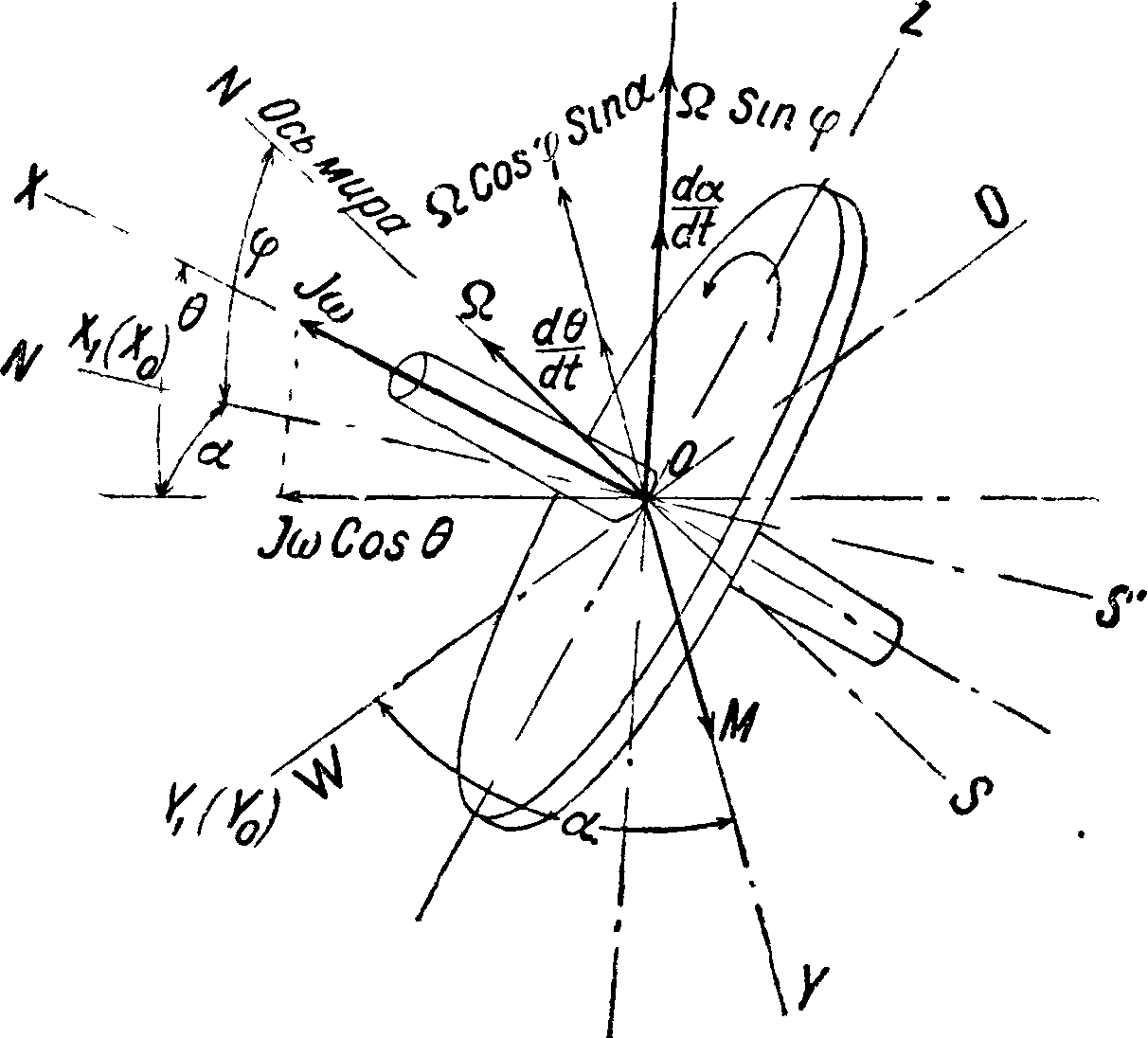
Рассмотрим движения гироскопа, пользуясь ур-ием прецессии (3). Имеем три системы координат (фигура 2). 1) OXYZ, связанную с кожухом ротора гироскопа т. о., что ОХ направлена по оси вращения (положительное направление совпадает с вектором момента количества движения), OY совпадает с горизонтальной осью вращения кожуха ротора (положительное направление на запад), OZ приблизительно вертикальна (положительное направление вверх); 2) ΟΧχΥχΖλ, связанную с данным местом зем-
ной поверхности, причем ОХг горизонтальна и направлена на север, ОУг— на запад, ΟΖχвертикальна; 3) ΟΧ0Υ0Ζ0 неподвижную в пространстве систему координат, совпадающую в начальный момент времени с системой ΟΧχΥχΖχ. Тогда скорость вращения земли Ω м. б. разложена по трем осям ΟΧ^ΥχΖх:
Ωχ=Ω cos φ,
Ωυ=0,
Ωζ=i2sin φ,
где φ—широта данного места. Положение оси гироскопа относительно системы ΟΧ1Υ1Ζ1определится углами а и 0, составляемыми осью ОХ с меридианом ОХх и с горизонталью; скорости же прецессий определятся как суммы скоростей прецессии относительно системы ΟΧχΥ ΧΖΧ и скорости последней системы относительно неподвижной ΟΧ0Υ0Ζ0. Для горизонтального прецессионного движения имеем:
1) скорость относительной прецессии равна ~,
2) скорость переносного движения равна Ω sin φ,
3) горизонтальная проекция момента количества движения равна Ja> cos 0, для малых углов с достаточной точностью можно принять cos 0=1, 4) момент маятника, стремящийся повернуть ось гироскопа горизонтально, равен Ga sin 0, где G—вес маятника, а—расстояние от его точки качания до ц. т.; в виду малости углов 0 можно принять Му=Gad, т. о. имеем по ур-ию (3):
Jo)^~Ω sin=Gad. (4)
Для прецессии в вертикальной плоскости имеем: 1) скорость относительной прецессии равна 2) переносная скорость равна Ω cos φ sin a
(т. к. составляющая i2cos φ cos a вектора скорости вращения земли, направленная по ОХ, слагается со скоростью вращения гироскопа, незначительно изменяя ее, и т. о. действия на прецессию не оказывает); 3) внешний момент равен нулю, и мы имеем
Jca ^ cos φ sin=0. (4")
Решая совместно оба ур-ия (4) и (4 ") относительно а, получаем (принимая в виду малости угла а его синус равным углу) после интегрирования ____
а= а„ sin (t j Ω cos φ I. (δ)
T. e. ось гироскопа в горизонтальной плоскости совершает незатухающие колебания с амплитудой а0, определяемой начальными условиями, и с периодом
Τ=2πΙ/£ϋ·—1—. (5")
г Ga Ω COS φ 4 J
Направляющий момент гироскопа равен — JωΩ^ •cos φ -sin a, т. e. достигает максимума под экватором (φ=0) и становится равным нулю у полюсов (φ=90°); момент этот тем больше, чем более отклонена ось гироскопа от плоскости меридиана. Для гирокомпаса Сперри например Ja>i2=204,5 гем. Из сказанного понятно, что гирокомпасы непригодны для плавания в око-лополярных морях. Для вертикальной прецессии 0 имеем после подстановки значения
tr в УР‘ие (4)··
0=ao |/^-i2cos y-cos (ί j j£i2cos ?) +
+ ё Ω sin φ, (5")
τ. е. в вертикальном направлении ось гироскопа также совершает незатухающие колебания с амплитудой 0О=a0 | —· Ω cos φ с тем же периодом Т, что и горизонтальные колебания вокруг направления, составляющего угол 0А=
= ·^ i2sin9? с горизонтом. Т. о. северный конец оси гироскопа будет совершать незатухающие колебания по эллипсу с полуосями La0 и Ld0 (где L—длина от центра гироскопа до конца оси), причем средняя линия этого эллипса будет лежать в северном полушарии на Ldk выше, а в южном—на Ldk ниже горизонта. Наличие незатухающих колебаний делает такой гироскоп неприменимым в качестве компаса. В гирокомпасе Сперри“с маятником для затушения колебаний принято следующее устройство. Маятник (противовес) связан с кожухом гироскопа не в центральной плоскости, а несколько отступя на восток (фигура 3, А—
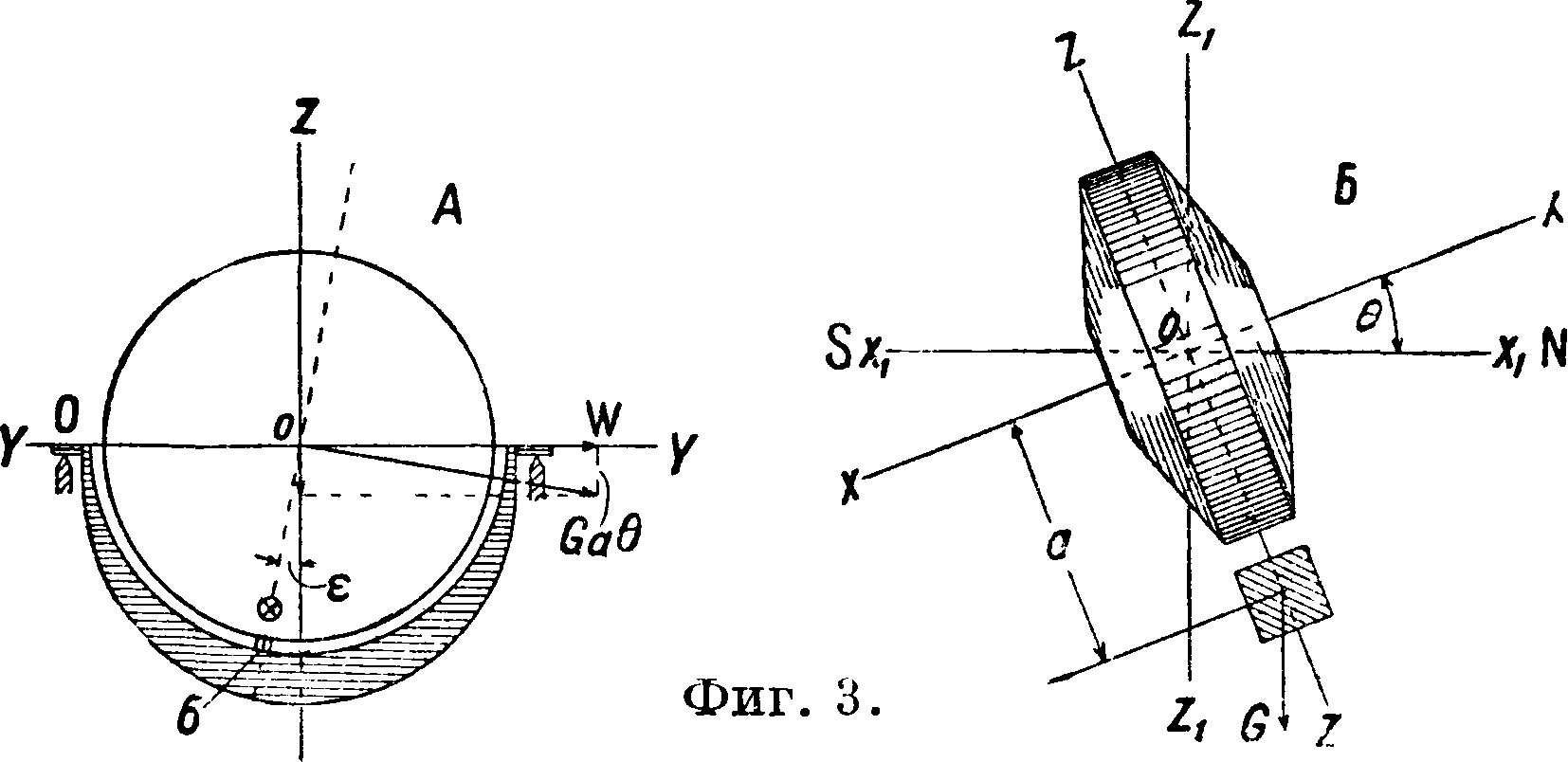
вид с северной стороны, Б—вид с восточной стороны)—в точке б, составляющей угол е с вертикальной осью вращения кольца гироскопа. Тогда момент противовеса в направлении О У остается почти без перемен, т. ч. ур-ие (4) не меняется, а в ур-ии (4") правая часть вместо 0 приобретает значение Gads. Решая систему двух диференциальных ур-ий
Ja>(^ + Ω sin 9?)=Gad и
Ωα cos 9?)=— Gads,
имеем:
a=Ae~kt sin Bt — s tg 9?
Θ=Се~ы cos (Di + β) + ^ &sin φ
Ур-ия (6) представляют собой затухающие колебания с окончательным положением равновесия ах — — s tg φ И 0χ=Ω sin φ, Т. е. В
северном полушарии северный полюс оси гироскопа отклонен к востоку от плоскости меридиана на угол ах и поднят над горизонтом на угол 0Х. Значения для южного полушария получим, приняв для φ отрицательные значения. Величина 0г очень невелика (для компаса Сперри под 30° равна 0,08°, под 60°—0,14°) и не оказывает влияния на показания компаса, величина ах обусловливает наличие девиации, меняющейся с широтой плавания и выправляемой корректирующим приспособлением.
Дальнейшим источником ошибок компаса является движение судна по земной поверхности. Движение корабля складывается из поступательного перемещения и вращения вокруг центра земли с угловой скоростью ψ=·^~ »
где V—скорость судна в м/ск и Rx—радиус земли в ж. Разлагая скорость корабля на направ-
ления по меридиану и по параллели, равные vM= V cos Си υη= ν sin С, где С—курс судна, имеем, что vn обусловливает вращение с угловой скоростью sin С, вектор которого на правлен по оси 0Хх (фигура 2), то есть он вызовет лишь весьма незначительное уменьшение вектора Ωο,ο^φ, но на направление его, то есть на положение равновесия компаса, влияния не окажет. Другая составляющая обусловливает вращение с угловой скоростью ~ cos С, вектор к-рого, направленный при движении на север к западу и при движении к югу—на восток, вызовет, складываясь геометрически с вектором Ω cos φ, изменение положения результирующего вектора скорости поворачивания гироскопа и след, пропорциональную этому смещению девиацию δυ, определяемую ур-ием:
tg<S,
cos С RlQ COS φ *
Т. о. окончательно получаем девиацию у корабля, идущего с постоянной скоростью ν без качки, по постоянному курсу С
« ν cos С. /17ч
*=ε^ν· (,)
Кроме указанных причин девиация компаса вызывается наличием ускорений (как поступательного движения, так и центробежных при поворотах корабля) и качки. Устранить их пока не удалось и стремятся лишь уменьшить
Фигура 4.
их значение соответственным подбором элементов гироскопа. Для условия апериодичности перехода компаса в новое положение необходимо, чтобы период его свободных колебаний равнялся периоду колебаний математич. маятника длиной в земной радиус, то есть Т0 =
= 2π|/^ ^ 85 минут. Как мы видели выше, строго удовлетворить условию нельзя, т. к. период гироскопа меняется с широтой места (у компасов Сперри Т ^ 76 мин. под экватором и 107 мин. под 60° широты). В современных гирокомпасах Сперри вместо маятника введены сообщающиеся сосуды (наподобие цистерн Фрама) с ртутью, вызывающие как наличие момента, определяющего необходимое прецессионное движение гироскопа, так и необходимое затухание колебаний. Ф-лы, выведенные для маятника (5), (50 и (6), остаются справедливыми и для этой конструкции с той разницей, что член Ga нужно заменить членом 2 &г2у> где 8—
площадь поперечного сечения одного сосуда, г—его расстояние от оси гироскопа, γ—плотность жид кости (ртути), налитой в сосудах. Применением надлежащей конструкции этих сосудов добиваются удовлетворительного уменьшения девиации гирокомпаса на качке.
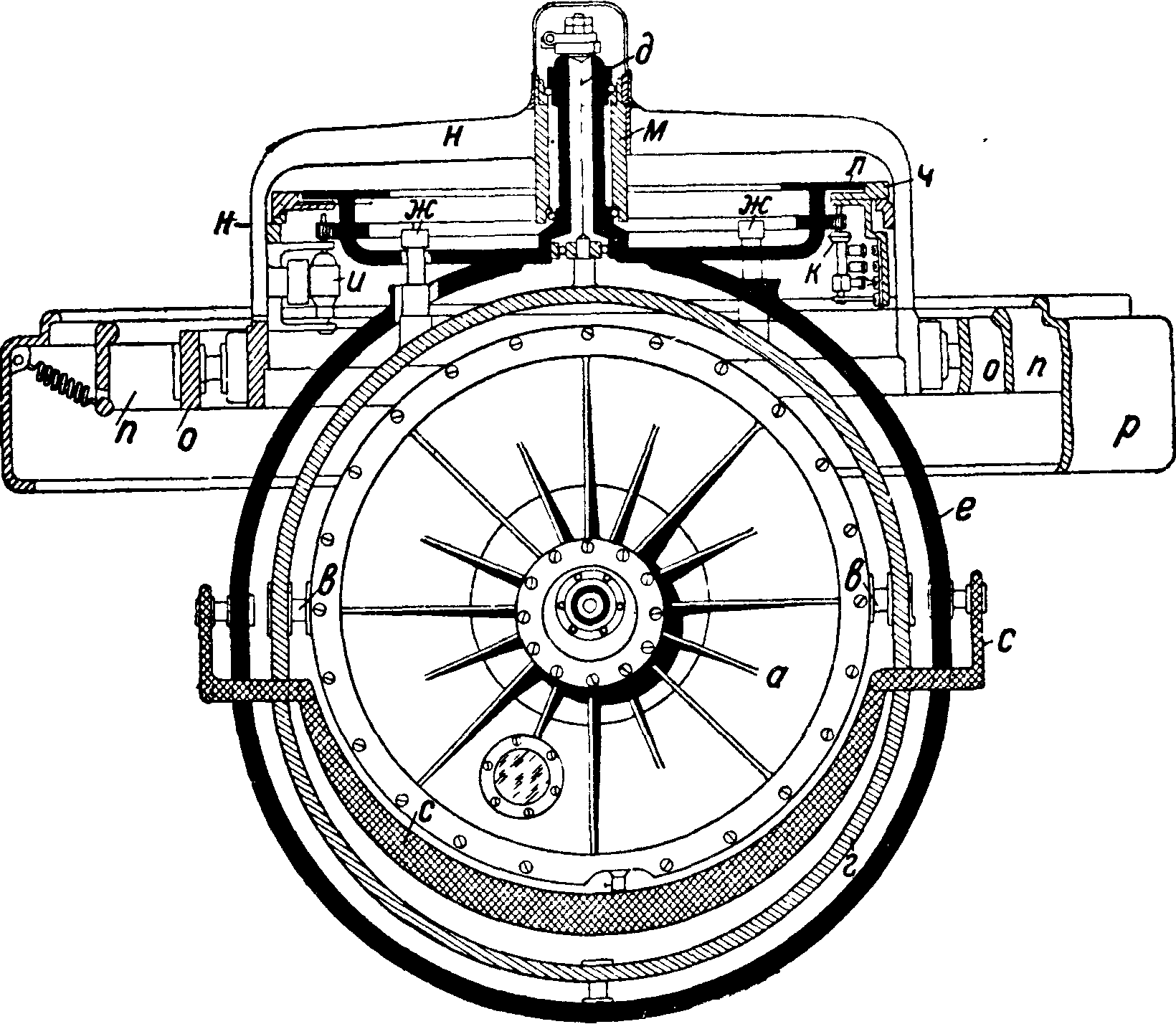
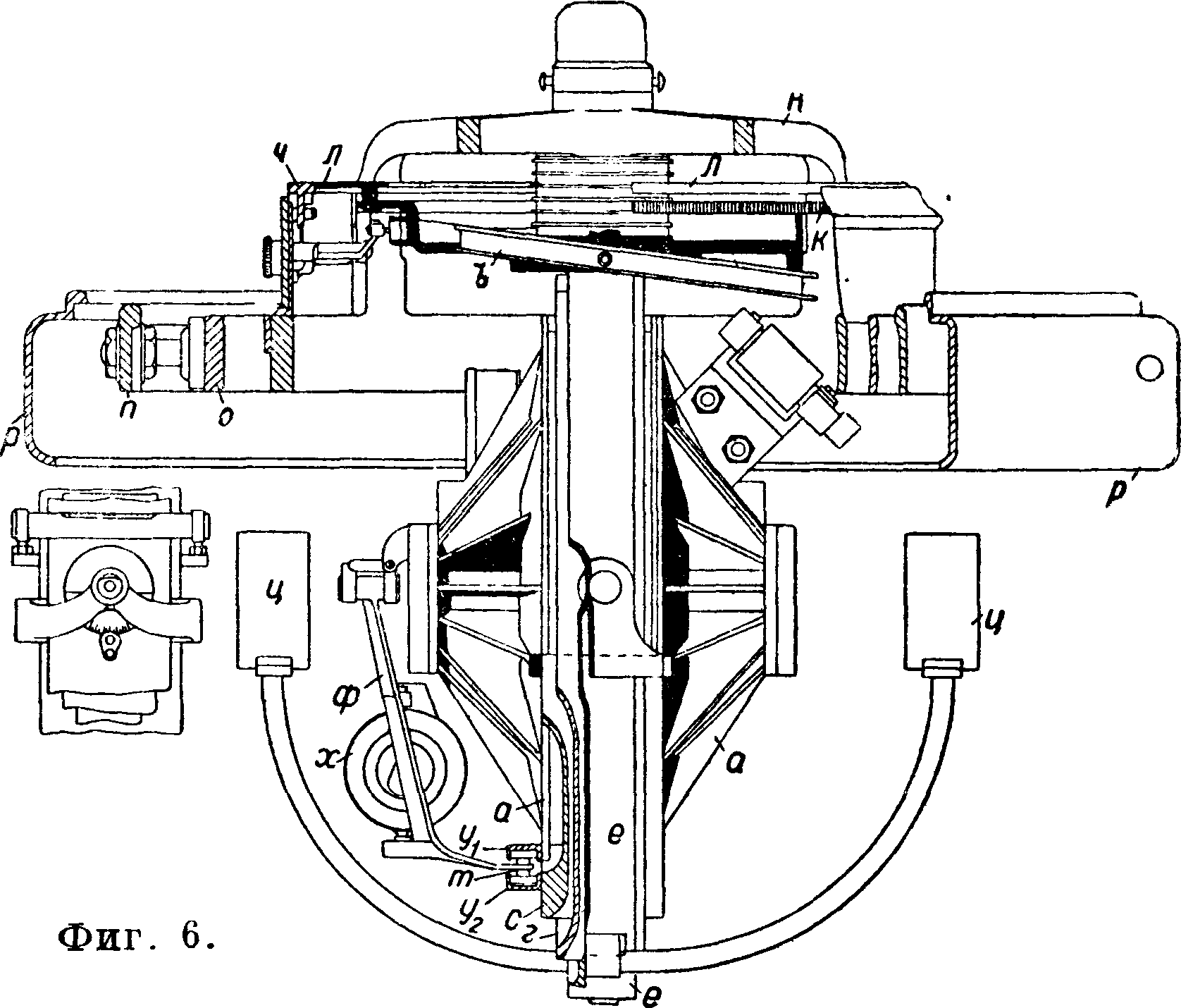
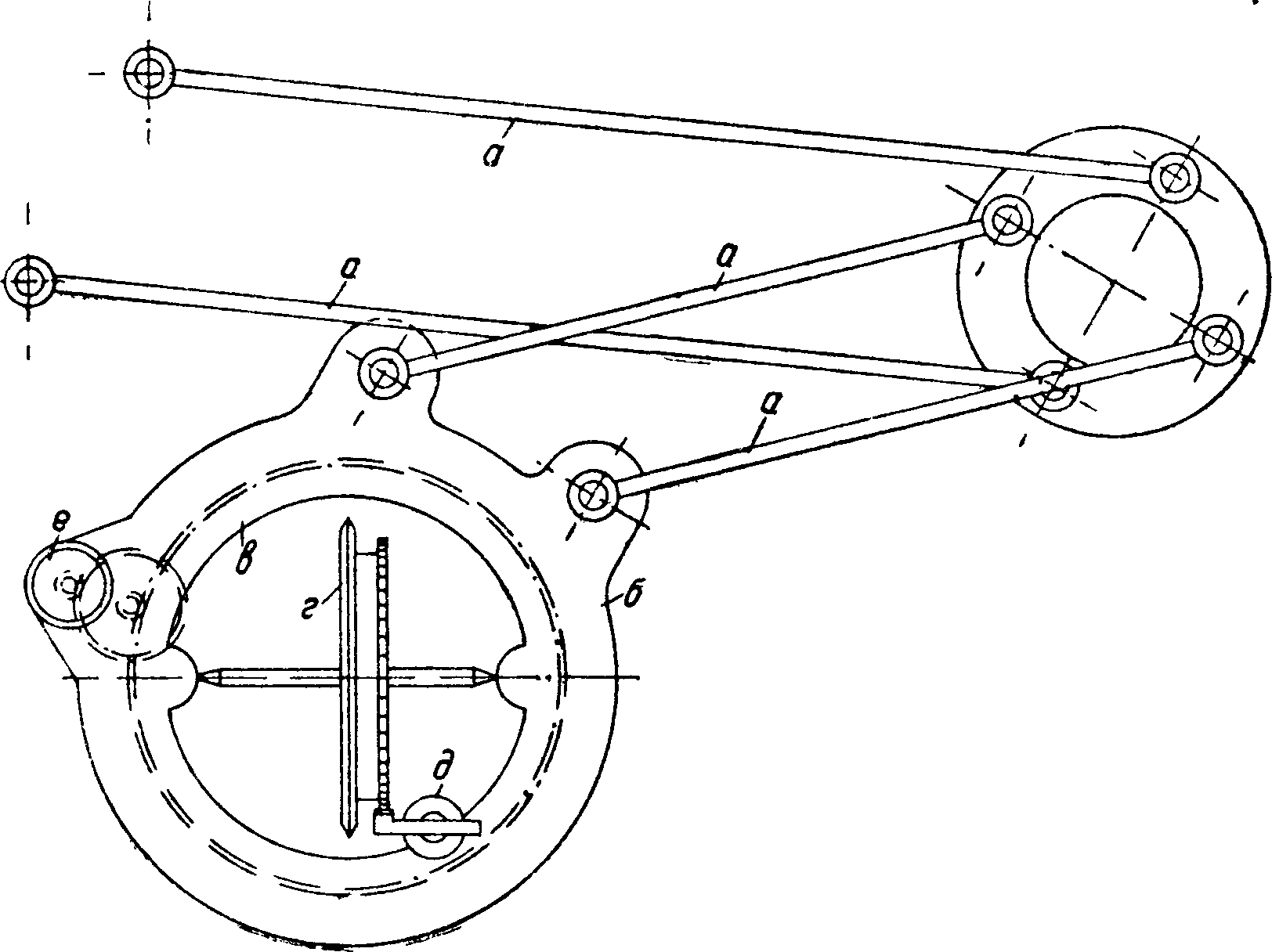
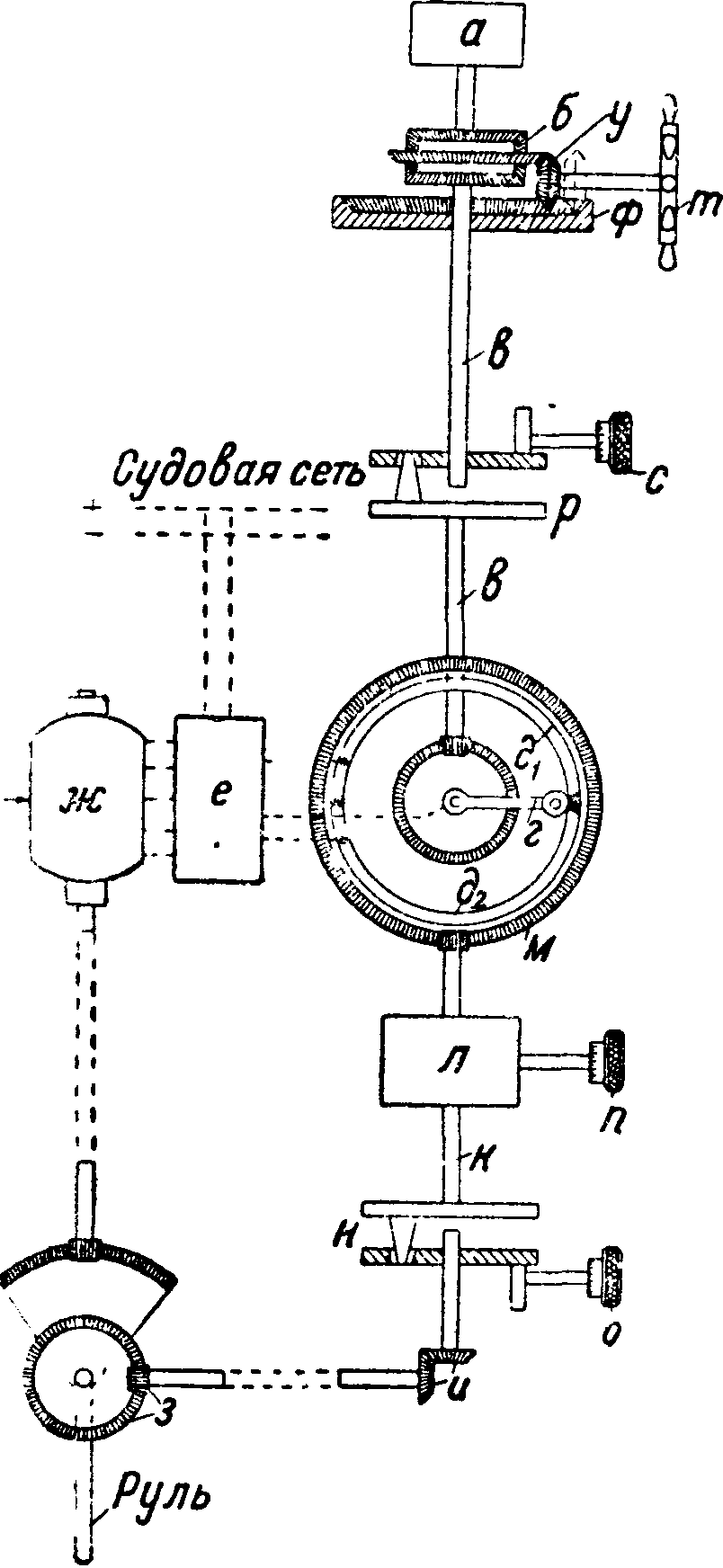
Практич. выполнение гирокомпаса Сперри показано на фигуре 4 (общий вид с южной стороны), фигура 5 (то же с северной стороны) и фигура 6 (то же с западной стороны). Основной частью
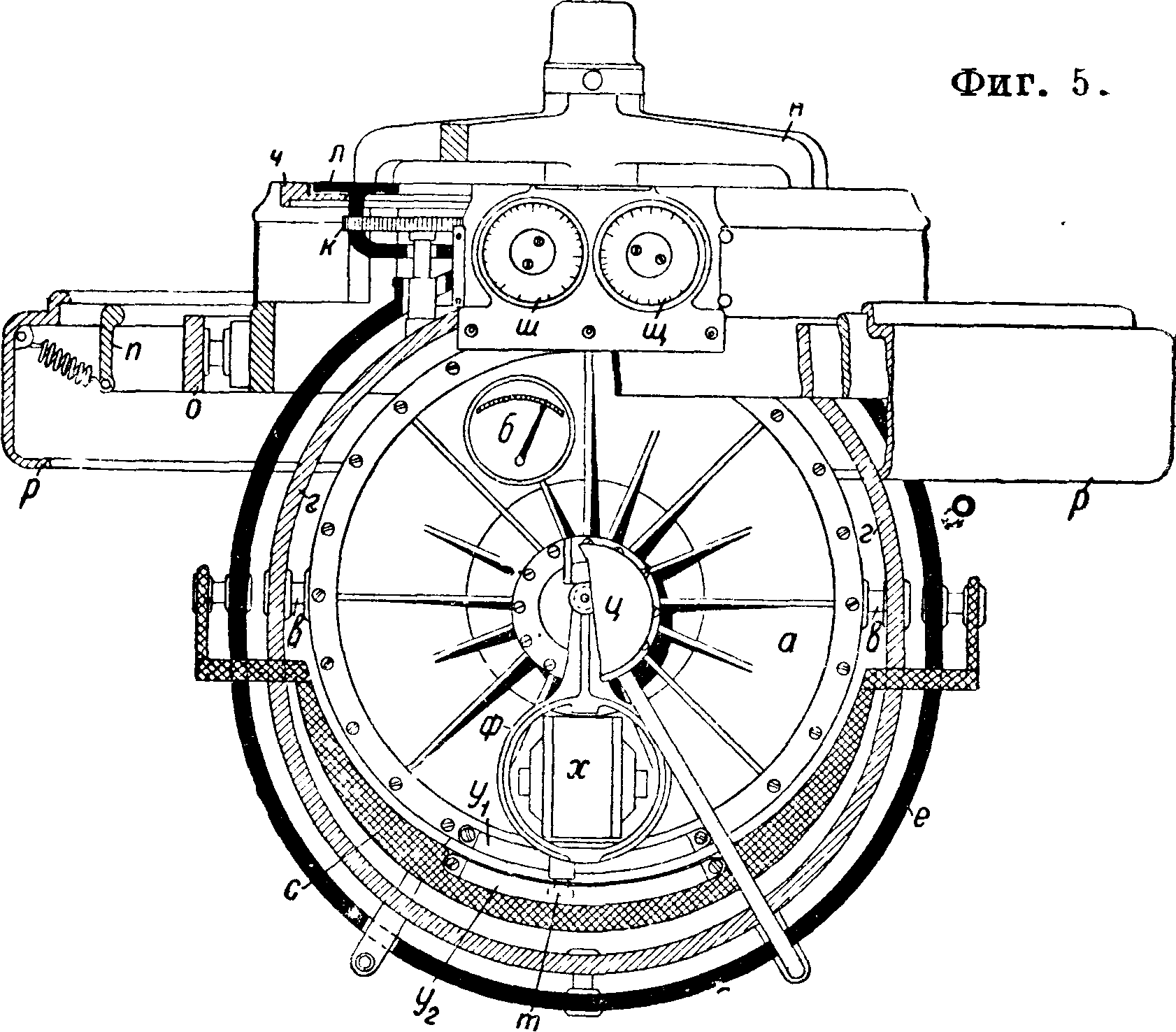
является тяжелый (21 килограмм) волчок, представляющий собой ротор асинхронного электромотора трехфазного тока и помещенный на шарикоподшипниках в гироскопич. камере а, являющейся одновременно статором. Камера снабжена вакуумметром б, показывающим уменьшенное давление, имеющееся в ней вследствие откачки воздуха через особый краник. Камера подвешена на горизонтальных осях в вертикальном кольце г, могущем вращаться на проволочном подвесе д, состоящем из пучка тонких проволочек, вокруг вертикальной оси внутри т. н. следящего кольца
e. Т. о. вращение вертикального кольца осуществляется со значительной - легкостью, пока угол закручивания подвеса незначителен. Задачей следящего кольца е и является постоянное следование за поворотами гироскопич. камеры с целью поддержания подвеса в раскрученном состоянии. Для этого вертикальное кольцо несет два роликовых контакта ж, при·
Фигура 7.
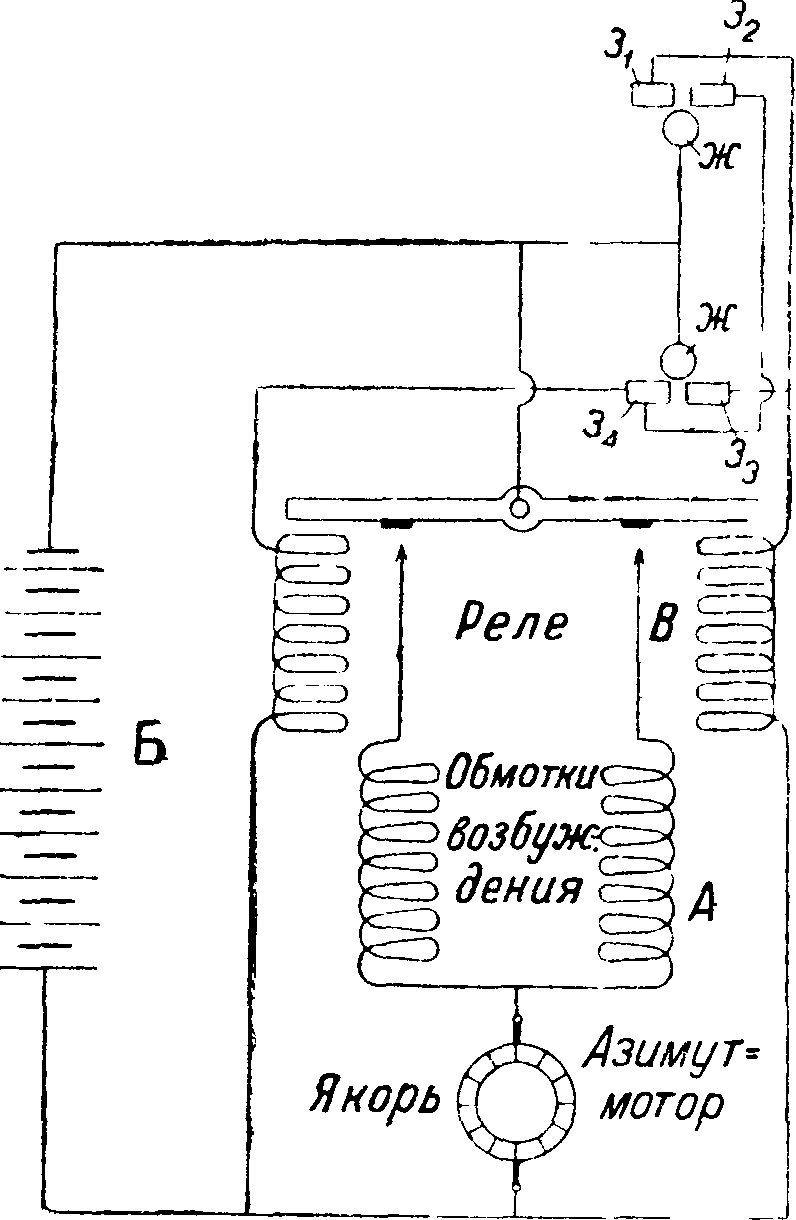
ходящихся против двух пар изолированных контактных пластинок зх, з2 и з3, з4 (фигура 7). Поворот вертикального кольца на Vs—Уз° от среднего положения (в зависимости от установки контактных пластинок) соединяет накрест лежащие пластинки (например зх и з3), вследствие чего ток от батареи Б проходит через обмотку В электромагнита реле, притягивающего якорь и замыкающего ток в одной из обмоток возбуждения небольшого т. н. азимут-мотора и (фигура 4), якорь которого несет шестеренку, зацепляющуюся через ряд передач с зубчатым венцом к, скрепленным со следящим кольцом. Т. о. следящее кольцо поворачивается в том же направлении, что и вертикальное кольцо, пока ролики ж не отойдут от контактных пластинок или не замкнут противоположной пары. Это постоянное переключение азимут-мотора вызывает непрерывное дрожание картушки л компаса, сидящей на следящем кольце с амплитудой в г/4—2/3°. Само следящее кольцо подвешено на шариковых подшипниках внутри втулки м. соединенной крестовиной п с внутренним кольцом карданова подвеса. Наружное кольцо последнего о опирается двумя цапфами на т. н. пружинное кольцо п, подвешенное на коротких винтовых пружинках внутри рамы р, прикрепляемой к нактоузу или непосредственно к корпусу^ судна. К следящему кольцу подвешен
серповидный маятник с связанный с камерой а гироскопа посредством двойного ролика ж, входящего в два паза ух я у2, прикрепленных: один к камере, другой к маятнику. Как было указано в теории, точка присоединения маятника к камере гироскопа должен быть всегда отклонена от вертикали на постоянный угол ε. Достигается это тем, что соединительный ролик подвешен на маятнике ф, к-рый для большей устойчивости на качке снабжен вспомогательным малым гироскопом х. С целью приблизить распределение массы в чувствительном элементе компаса (то есть камере вместе с внутренним кольцом) к шару, что важно для устранения возможности девиации при качке вследствие наличия одной определенной плоскости симметрии распределения масс, к внутреннему кольцу прикреплены два компенсационных груза ц. В качестве противовеса малому гироскопу на северной стороне камеры прикреплен трансформатор для питания малого гироскопа. Выше было выведено, что общая девиация гирокомпаса Сперри выражается ф-лой (7), к-рую можно написать в форме д у cos С К cos <р
-etgp.
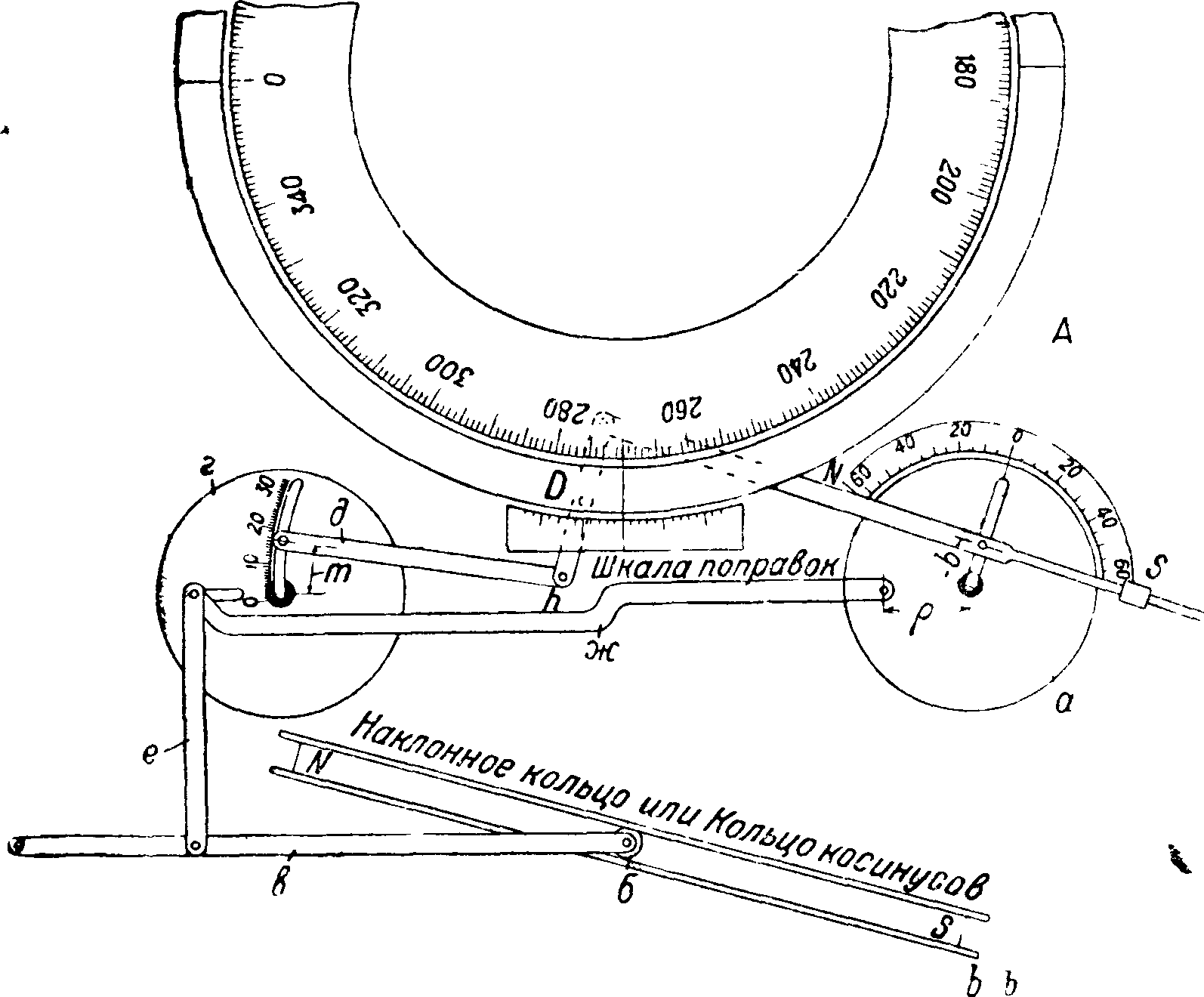
Как видно из ф-лы, величина девиации зависит от трех переменных—скорости судна v, широты места φ и курса судна С. Исправление девиации производится путем перемещения нулевой черты курсового кольца ч при помощи особого коррективного приспособления. Две из трех переменных—φ и v—меняются сравнительно медленно, и поэтому установка коррективного приспособления на эти параметры производится вручную на двух циферблатах: скоростей ш и широт щ, укрепленных на внутренней крышке компаса. Поправка на курс вводится автоматически при помощи скрепленного со следящим кольцом наклонного кольца косинусов. Схема коррективного приспособления изображена на фигуре 8. Предположим сначала, что судно идет с постоянной скоростью под экватором по курсу W, тогда v=Const. (7=270° и φ=0; вся система имеет при этом, вид, изображенный на фигуре 8,А. Поправка при: этом равна 0 и курсовые черты совпадают с
*
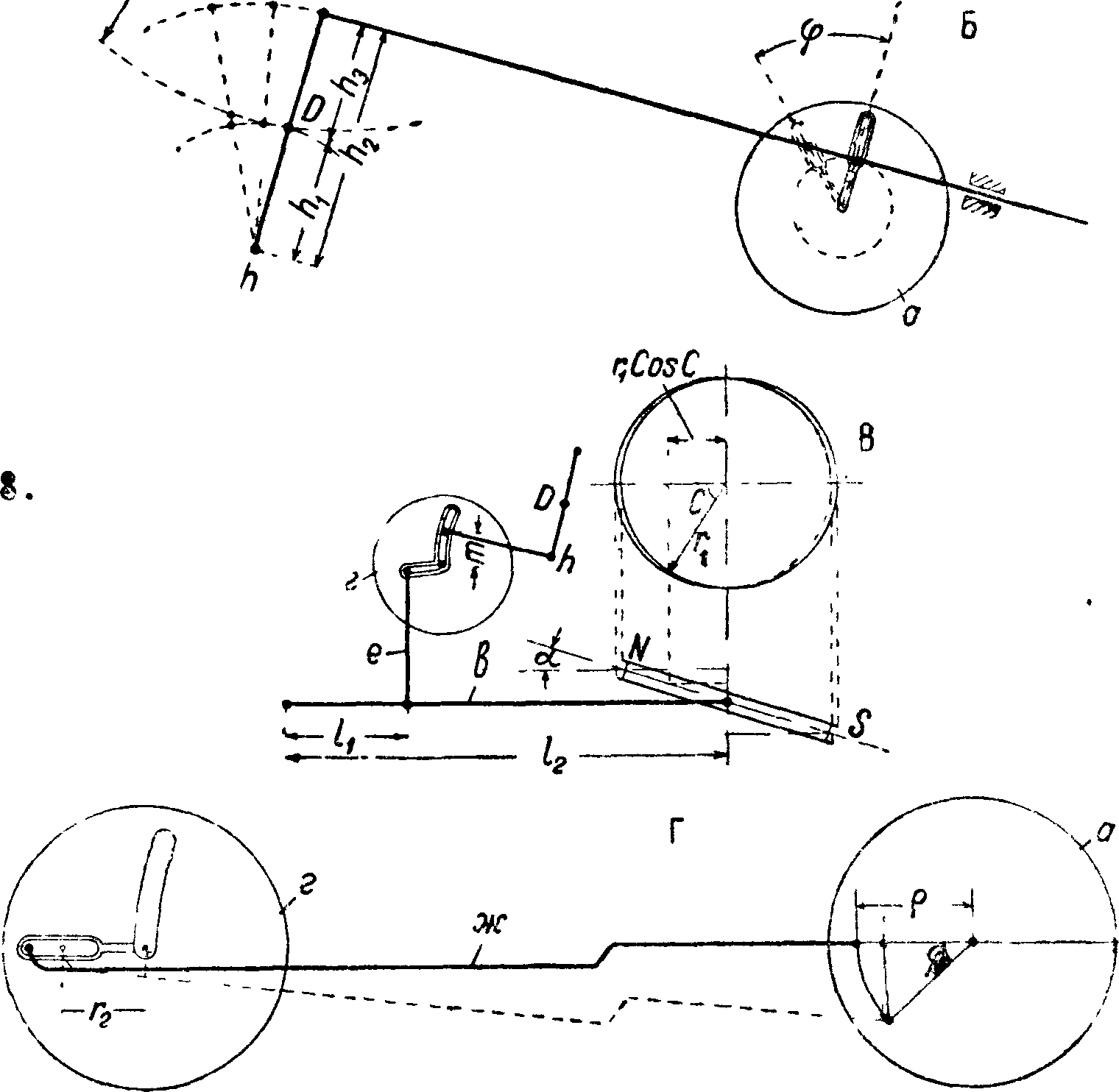
диаметральной плоскостью судна и его траверсом. Если при тех же v и С будет меняться широта, то в поправке, будет изменяться член —ε tg φ (положительными считаются северные широты и западные девиации). Установив циферблат широт а на какую-нибудь северную широту φ (фигура 8,Б), мы тем самым переместим (точка h остается неподвижной) курсовое кольцо I)
на восток на угол δ s* ^ · -^tg φ. Если при неизменной широте φ мы изменяем курс судна, то вместе со следящим кольцом вращается кольцо синусов, перемещающее вверх или вниз на величину г sin a cos С ролик б, сидящий на конце рычага в (фигура 8,В); последний повернет диск скоростей г на угол, равный
ΙχΤχ sin g COS С hr z
Поворот диска скоростей вызовет перемещение курсового кольца на угол, равный ΙχΤχ mhz sin a cos С hr^h^R
Радиус т изменяется прямо пропорционально скорости путем перемещения конца рычага д в прорезе диска, т. e. m=kv. С другой стороны точка прикрепления рычага е к диску г связана тягой ж (фигура 8,Г) с диском широт, и т. о. величина радиуса г2 изменяется в зависимости от положения диска широт, причем r2=g cos <р. Окончательно имеем угол смещения курсового кольца равным
ΙχΤχΚνίΐζ sin a cos C hxb + _ v cos C
Ог V-----
<5 :
hhiRg COS φ
К COS φ
•etg φ,
Где K==Ri-Q И hi=β; “ подставляя
К=464,92 м/ск, получаем необходимую поправку компаса. Предположим, что h1=h3 =
— γ, R=150 миллиметров, 7с =4 (то есть приблизитель но 2 миллиметров на 1 узел), е=0,08, -^-=0,2, rx=150 миллиметров, g=40 миллиметров, тогда b=^ Re=24 миллиметров, sin α==£ · Й 71 ϊβϊ^Ίί=°>2^8, ЧТО соответствует
-α= 12°30. Т. о. корректирующее приспособление, сдвигая нулевую черту курсового кольца на величину девиации компаса при данных условиях, дает отсчет истинного курса судна.
Описанный гирокомпас представляет собой главный компас, компас-матку, к-рый устанавливается в хорошо защищенном месте судна и не служит непосредственно целям управления судна. Для этой цели имеется ряд компа-чюв-указателей, связанных электрически с главным компасом и повторяющих своими картушками положение картушки компаса-матки относительно курсового кольца. Для этого на последнем укреплен передатчик, представляющий собой трехполюсный прерыватель, соединенный зубчатой передачей с ободом зубчатого диска следящего кольца т. о., что при повороте последнего относительно курсового кольца на 1° •{или на 1 зубец, т. к. диск имеет 360 зубцов) валик прерывателя совершит один оборот и дважды замкнет каждый из трех контактов, соединенных соответственно с тремя парами магнитов небольшого электромоторчика, помещающегося в компасе-указателе и зацепляющегося зубчатым колесом, насаженным^ на его якоре с зубчатым венцом, нарезанным по •окружности картушки компаса-указателя. Т. о. вращение следящего кольца относительно курсового кольца, то есть всякое изменение истинного курса судна, передается немедленно всем компасам-указателям, к“рые устанавливаются в потребном числе на судне. При этом положение компасов-указателей не должен быть обязательно горизонтальным, как у обычных компасов, а их можно устанавливать под любым углом к горизонту, смотря по цели данного компаса. То обстоятельство, что гирокомпас дает электросигналы, синхронные с изменением курса корабля, позволяет приводить от него в действие ряд дальнейших Э. п., облегчающих задачу управления судном; к числу этих элек-тронавигационных приборов относятся курсо-граф, одограф, гирорулевой.
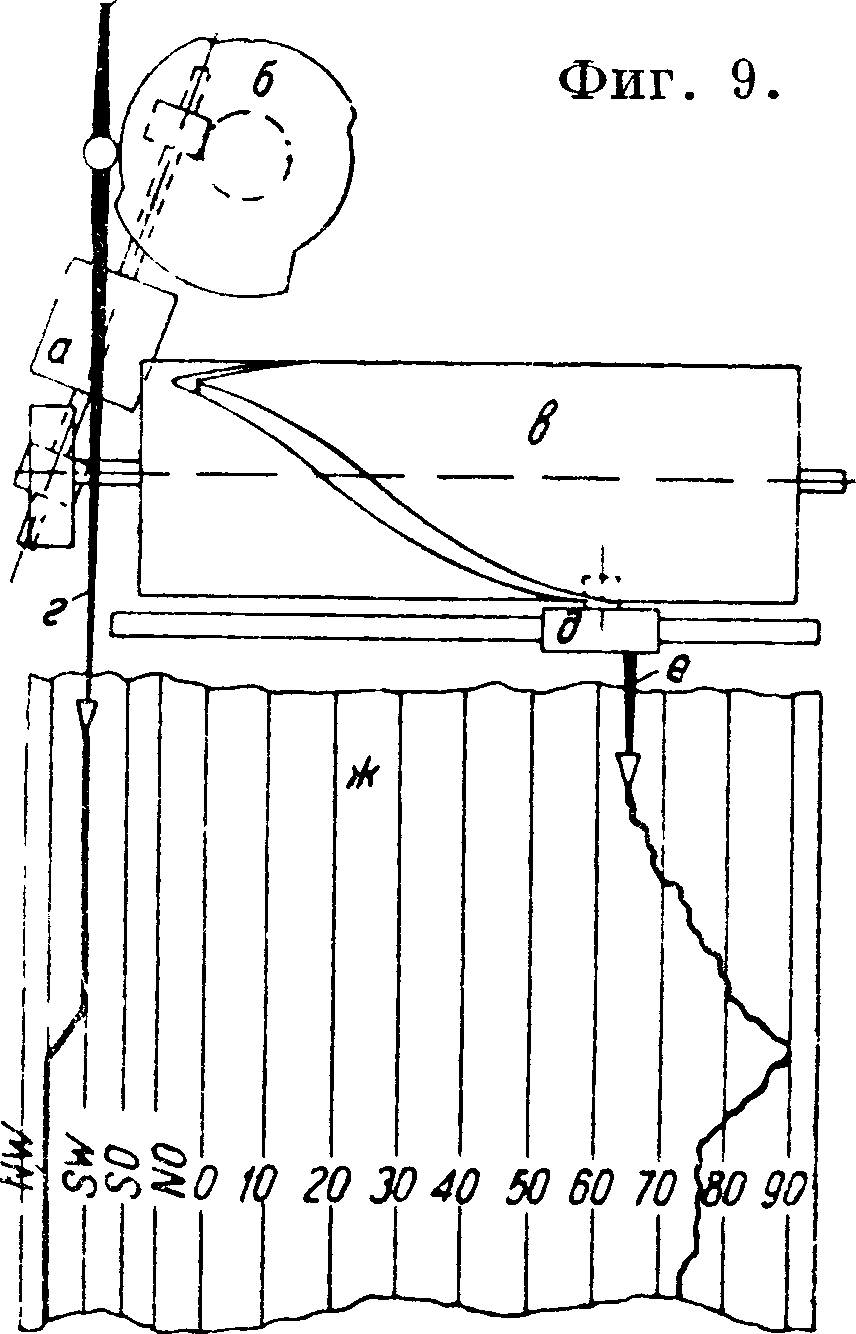
Курсограф Сперр и—прибор для ав-томатич. записи курса корабля в ф-ии времени. Существенной частью этого прибора является моторчик а (фигура 9), электрически связанный с гирокомпасом и приводящий в движение диск б и барабан в; первый обточен по окружности по четвертям различными радиусами и совершает один оборот за один оборот картушки компаса, авто-рой имеет двойную винтовую канавку и совершает два оборота за один оборот картушки. На окружность диска б опирается ролик одного пера г, отмечающего ту четверть компасной розы, в которой лежит отмечаемый курс. В прорез барабана’ в входит палец каретки d, несущей второе перо е, отмечающее курс, указываемый компасом. Бумажная лента ж, перемещаемая часовым механизмом, имеет соответствующую разбивку; на ленте также отмечено время в часах и десятках минут. Прибор допускает беспрерывную работу в течение 30 суток. Прибор дает документальную запись курсов корабля за истекшее время, позволяет проверять работу рулевых, оказывает помощь при балансировке и выверке гирокомпаса и гирорулевого; изготовляется для работы со всеми марками гирокомпасов Сперри.
Одограф Сперри-Виллье (Villiers), прибор для автоматич. прокладки на карте движения корабля, дающий автоматически
счислимое место корабля на карте в каждый момент. Прибор электрически связан с гирокомпасом дающим курс корабля, и с электрическим ла-фиг. 10> гом, сигнализирую щим пройденные кораблем расстояния. Одограф состоит из железной доски, на которой укрепляется карта и к которой прикреплена на двойном шарнирном параллелограмме аа (фигура 10) рамка (платформа) б прибора, свободно перемещающаяся т. о. в любом направлении, но остающаяся всегда параллельной самой себе; на окружности выреза рамки нанесен азимутальный круг. Внутри рамки расположена вращающаяся вокруг вертикальной оси тележка в, несущая вертикально расположенное ведущее колесо г с острым краем, лежащее на карте. Это колесо поворачивается сердечником соленоида д, втягиваю-
Фигура 11.
щимся внутрь последнего при замыкании контактов лага; т. о. рамка одографа получает поступательное движение в направлении плоскости колеса г, совпадающей с плоскостью курсовой черты тележки. Направление курсовой черты определяется моторчиком е, электрически связанным с гирокомпасом и ставящим всегда тележку в направлении имеющегося курса относительно рамки, а следовательно и относительно карты. При пуске одографа курсовая черта устанавливается на истинный курс корабля в данный момент, и одограф в дальнейшем передвигается по карте по линии, изображающей в принятом масштабе путь судна. Для согласования движения одографа с масштабом карты ход сердечника соленоида может ограничиваться навинчивающейся на него гайкой со шкалой масштабов. На шкале нанесены длины мерка-торской мили карты с точностью до 0,001 дм. Пределы установки одографа на масштаб достаточно широки, и он может работать как на планах, так и на генеральных океанских картах. В нижней части одографа имеются два электромагнита, постоянно притягивающие одограф к железной доске, чтобы одограф от толчков и качки не сдвинулся с места. К одографу прикреплен палец с карандашом, острие которого устанавливается на место корабля на карте и к-рый в дальнейшем и производит прокладку. Одограф достаточно точно прокладывает движение корабля; особенно ценен он при маневрировании и эволюциях; при обычном плавании он ценен гл. обр. как контроль прокладки штурмана, т. к. одограф не учитывает сноса корабля от ветра и течений и работает точно только при вполне исправных гирокомпасе и лаге.
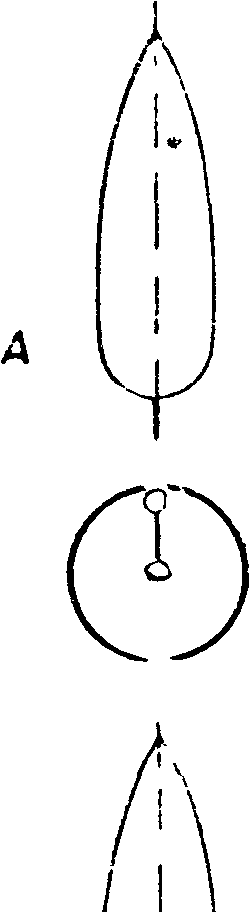
Гирорулево й—прибор для автоматич. удерживания корабля на назначенном курсе, м. б. установлен на судах, имеющих гирокомпас. Приборы изготовляются фирмами Сперри и Аншютц нескольких типов для ^применения с различными рулевыми устройствами. Гирорулевой Сперри имеет следующее устройство. Моторчик а (фигура 11), электрически связанный с гирокомпасом, через диференциал б и вал в передвигает контактный ролик г по двум контактным полукольцам и d2 с изолированным промежутком между ними, соединенным с реле е реверсивного электродвигателя рулевой машины ж. Пока корабль лежит на курсе, ролик находится на изоляторе. Как только корабль отклонится от назначенного курса, ролик накатывается на одно из полуколец, почему реверсивный электродвигатель начнет перекладывать руль т. о., чтобы возвратить корабль на курс. Для ограничения угла кладки руля контактные полукольца сделаны следящими за контактным роликом при помощи ме-ханич. передачи через зубчатые колеса з, и, вал к и сменную передачу л от баллера руля
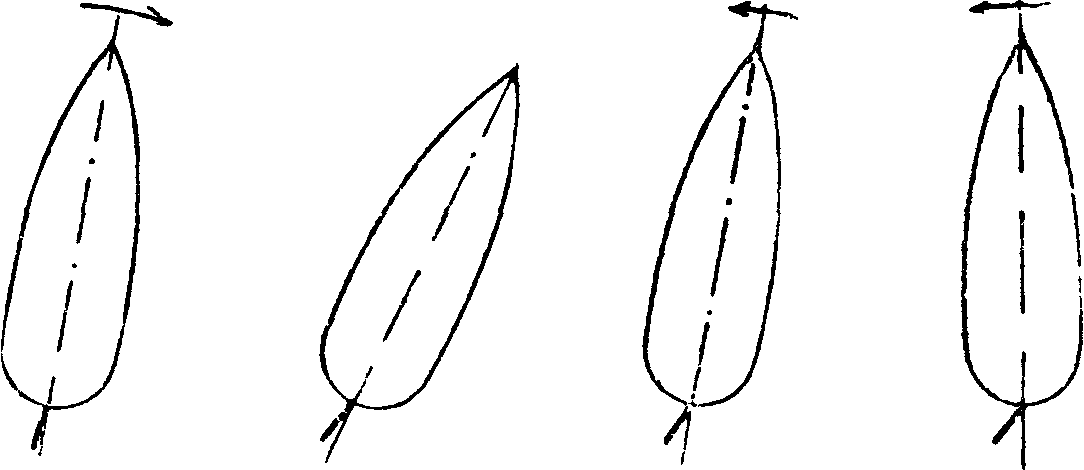
или штурвала на зубчатый венец м, связанный с кольцами дх и d2. Перекладка руля прекращается, как только изолятор между полукольцами догонит ролик. Для достижения необходимой величины начальной кладки руля система полуколец следует за роликом с некоторым запозданием, в течение которого руль будет переложен на больший или меньший угол. Запоздание достигается введением муфты мертвого хода н в передачу движения полуколец; величина мертвого хода регулируется штур-вальчиком о. Необходимость устройства следящих (а не неподвижных) полуколец и д2и муфты мертвого хода ясна из следующего. При неподвижных полукольцах (фигура 12, А) ролик был бы все время в контакте с одним из полуколец, пока корабль был бы отклонен от курса в данную сторону. Следствием этого было бы то, что к моменту прихода корабля на требуемый курс руль оказался отклоненным на максимальный угол, и скорость вращения корабля вокруг вертикальной оси (скорость рыскания) была максимальной, так что корабль, продолжая дальше свое рыскание, увалится на противоположный курс и т. д., таким образом движение его представляло бы собой зигзагообразную линию. При следящих кольцах (фигура 12, Б), наоборот, перекладка руля останавливается, как только корабль остано-
ψ ψ ψ ψ
Θ Θ Θ Θ
I
® <Θ Θ © Θ
г
!Ч
Фигура 12.
0 /0 0 0
вился в своем рыскании (положение III) и при возвращении корабля на курс (F). Однако и в этом случае инерция корабля при возвращении на правильный курс заставляет его перейти последний. Наиболее желательными являются перекладка руля в прямое положение несколько ранее прихода корабля на курс и одерживание его в момент прихода перекладкой руля немного на другую сторону. Для этого вводится в проводку валов, вращающую полукольца, муфта мертвого хода, вызывающая нек-рое запаздывание перемещения колец срав-
нительно с движениями руля. При этом при выходе корабля из курса (фигура 12, В, I, II) немедленно начинает свою работу рулевая машина, перекладывающая руль, кольца же пока остаются в покое; следствием этого является более быстрая перекладка руля, вызывающая скорую остановку рыскания (положение III). Как только корабль начинает возвращаться на курс, ролик накатывается на другое полукольцо и рулевая машина начинает перекладывать руль в обратную сторону, полукольца стоят на месте, пока не будет выбрана вся игра в муфте мертвого хода (положение IV). Т. о. к моменту прихода судна на курс руль окажется слегка переложенным на противоположный борт, а полукольца—совершающими движение в сторону привода (положение F), так что в следующее мгновение рулевая машина начнет перекладывать руль в обратную сторону и т. о. поставит его прямо. Величина мертвого хода зависит от мореходных качеств судна в данных условиях. Помимо величины мертвого хода на скорость движения следования полуколец влияет величина передачи от сектора руля на полукольца, зависящая от положения штурвальчика п (фигура 11), управляющего коробкой передач л. Т. о.
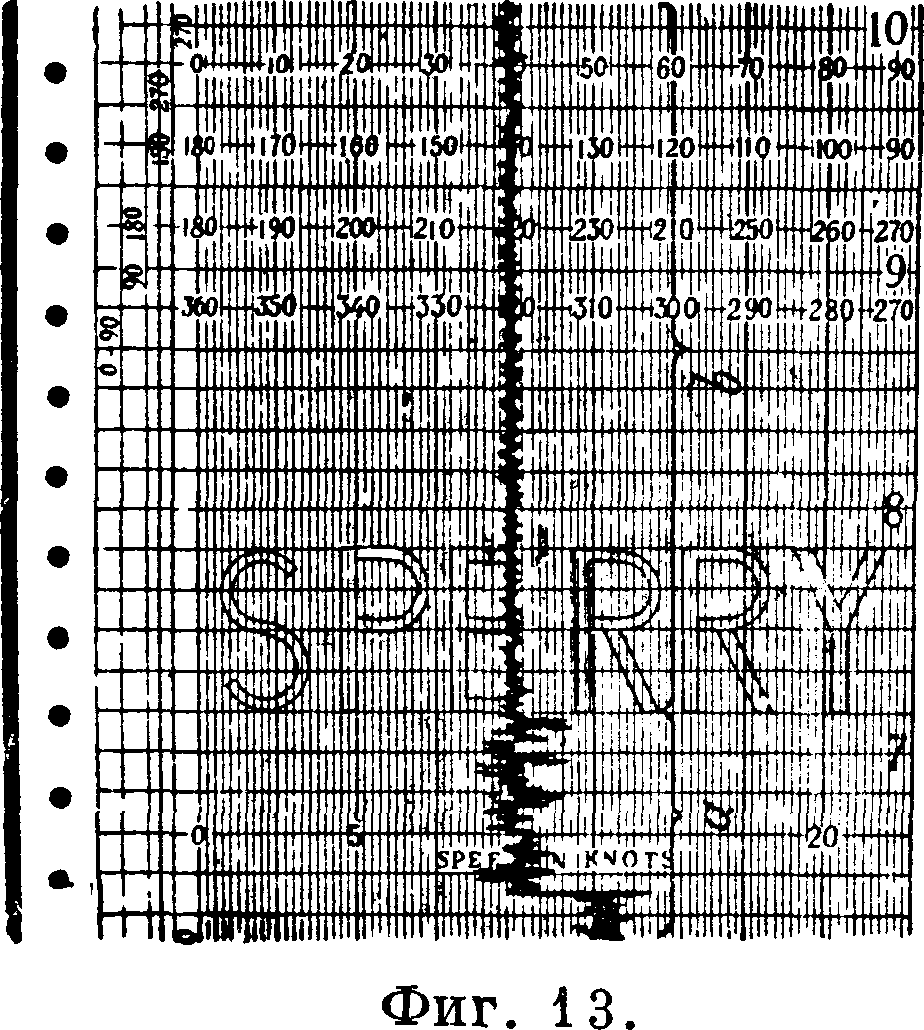
(овместным действием штурвальчиков п и о можно отрегулировать передачу т. о., что гирорулевой будет держать курс постоянным с небольшими отклонениями в ту или иную сторону на 1—1,5°. Сравнение диаграмм курсо-графа при ручном управлении (фигура 13) а и при работе гирорулевого b показывает преимущества последнего; постоянство курса выгодно в том отношении, что, увеличивая скорость корабля при той же мощности двигателя, сокращает время перехода и уменьшает расход топлива; кроме того он значительно облегчает напряженную и тяжелую работу штурвальных и штурманов. Для управления судном на большом волнении бывает желательно, чтобы гирорулевой не реагировал на отклонения судна от курса, обусловленные волной, т. к. эти рыскания взаимно компенсируются и их выправление вызвало бы лишь ненужную работу рулей. Это дости-. гается введением V второй муфты мертвого хода р (фигура
• 11), регулируемой
• штурвальчиком с,
• в линию вала в.
• Изменение кур-
• са производится. штурвалом т,вра-β щающим клетку сателлитов дифе-ренциала б. Пе-
• i ремещением двойного конического колеса у в положение, указанное пунктиром, диференциал освобождается, и штурвал сцепляется с зубчатым колесом ф, насаженным на вал в, что дает возможность управлять рулевой машиной вручную. Гирорулевой получил значительное распространение на коммерческих судах и является в настоящее время необходимым звеном гирокомпасной установки.
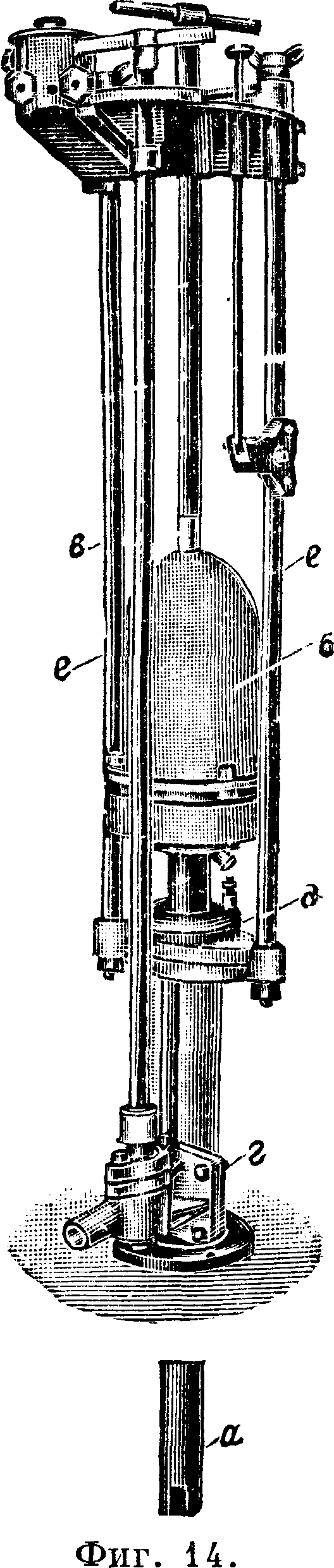
Электромеханические лаги, приборы для измерения скорости корабля и пройденных им расстояний, применяются на современных судах взамен ручного лага и ла га Уокера (смотрите Лаг), в отличие от которых элек-тромеханич. лаги могут применяться при любых скоростях, не стесняют движения корабля и м. б. установлены на подводных лодках. Наиболее распространенными электромеханич. лагами являются лаги Форбса, Сал и Черни-кеева. Лаг Форбса (l· orbes, фирма Elliott, Лондон) состоит из трубки а (фигура 14), опускаемой вертикально в воду под днище корабля. В нижней части трубки находится отверстие, обращенное в нос корабля, вверху погруженной части трубки—отверстие в корму. Внутри трубки расположен винт, сидящий на вертикальной оси, которая соединена с передатчиком, находящимся в верхней части трубки б лага внутри корабля. При движении корабля вода, протекающая в трубе, приводит в движение винт, который вращает якорь магнитомашины передатчика. Напряжение, развиваемое на щетках машины, зависит от скорости вращения винта, то есть от скорости корабля, поэтому вольтметры (до 10 шт.), присоединенные к машине, м. б. проградуированы на узлы и явятся указателями скорости корабля.
Кроме якоря машины винт вращает замыкатель, периодически замыкающий на короткое время ток в цепи электромагнитов счетчиков пройденного расстояния.
Число замыканий электромагнитов зависит от количества оборотов, сделанных винтом, то есть от пройденного кораблем расстояния. Для опускания и поднимания труб и передатчика в междудонном пространстве корабля устанавливается станок в лага с запорным клапаном г, сальником д и направляющими штоками ее, по которым ходит передатчик лага. В днище корабля проделывается отверстие. В поднятом положении лаг удерживается стопором, и запорный клапан м. б. закрыт. В опущенном положении лаг выступает на 38,2 сантиметров (15 дм.) под днище. При закрытом клапане лага трубка и передатчик м. б. вынуты из станка. Для уничтожения поправки счетчиков расстояний в передатчике имеются сменные шестеренки, а для регулировок указателей скорости в цепи вольтметров имеется реостат. Лаг Форбса имеет следующие недостатки: увеличивает осадку корабля на 38,2 сантиметров (15 дм.) и не сохраняет постоянной поправки, последняя изменяется с изменением скорости корабля; на малых ходах лаг мало чувствителен, а при скоростях 2—3 узла не работает вовсе. Шведский лаг Сал (Svenska Actiebolaget Log) основан на разности статич. и динамич. давлений воды (смотрите Лаг) при движении корабля.
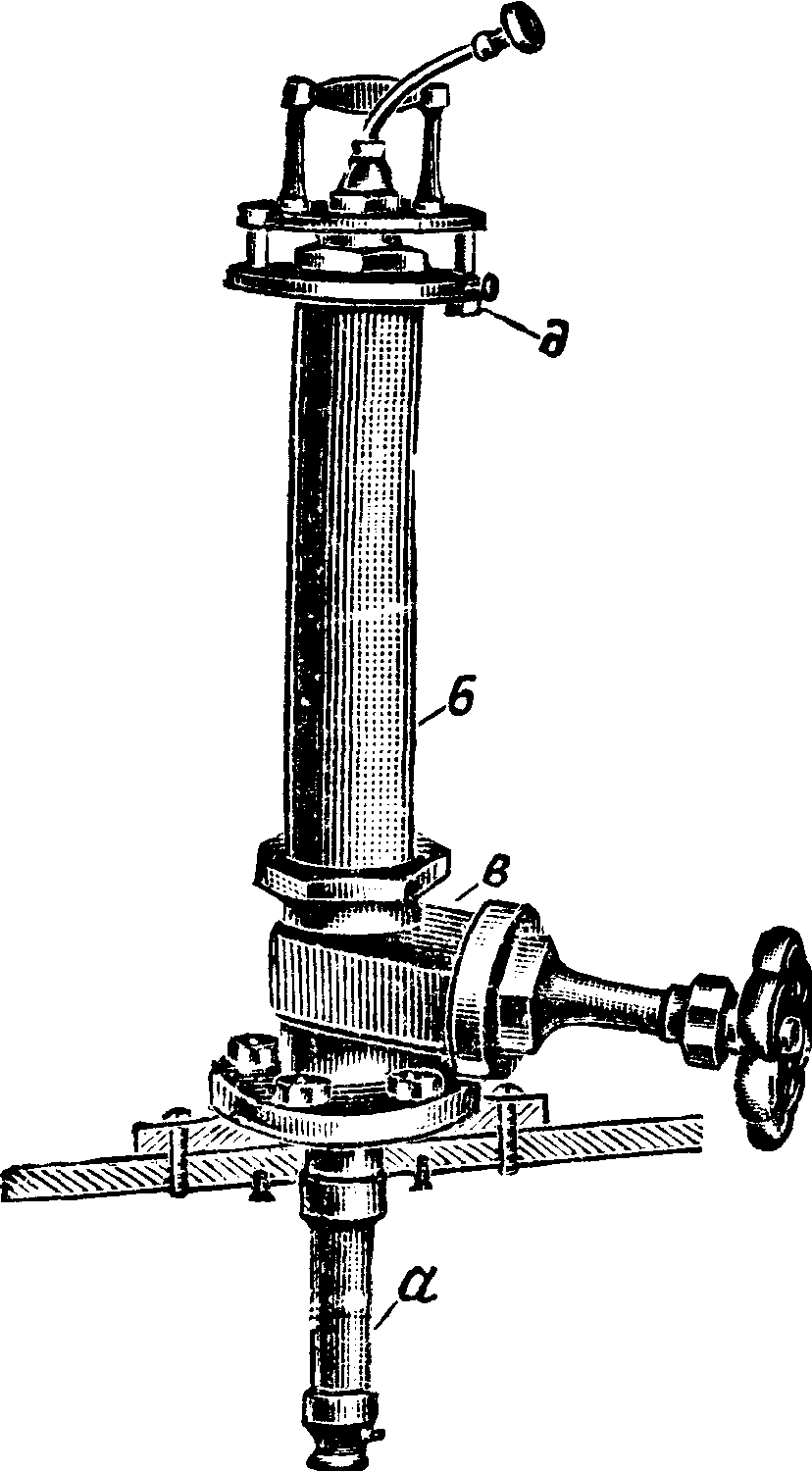
ЛагЧерникеева (The Submerged Electric Log Со., Лондон) состоит из стержня-суппорта а (фигура 15), выставляемого на 38,2 сантиметров (15 дм.) в воду за днище или борт корабля. Для установки лага на корабле в междудонном пространстве находится станок б с запорным клапаном в и сальником д. В нижней части суппорта находится четырехлопастный винт, обращен-
Фигура 15.
ный к носу корабля. Ось винта укреплена в водонепроницаемой камере, внутри которой находятся контакты, замыкаемые при вращении винта. Для полной изоляции контактов от воды камера заполняется маслом. Вращение винта происходит с ничтожным трением, почему лаг чрезвычайно чувствителен. Замыкания контактов лага заставляют работать счетчики пройденного расстояния подобно лагу Форбса. Для указания скорости корабля применен хронометрии, тахометр, учитывающий пройденное им в определенный (18 ск.) промежуток времени расстояние и отсюда выводящий скорость. Основной указатель заключает в себе часовой механизм и дает скорость корабля 3 раза в мин. с точностью 72 узла. Электрич. указатели скорости повторяют показания основного указателя. Лаг Черни-кеева работает с постоянной поправкой при скоростях 1-^-40 узлов; недостатком его является сложность указателя скорости. Лаг Черникеева для торговых судов не имеет указателей скорости, а только счетчики пройденного расстояния.
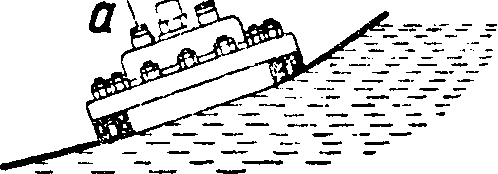
Э х о-л о т—прибор для звукового измерения глубин. Зная скорость звука в воде (смотрите Звук, Подводная а к у с т и к а) и определив промежуток времени между моментами отдачи подводного звукового сигнала и приема эхо этого сигнала, отраженного от грунта, легко найти длину пути звука в воде и определить т. о. глубину. Скорость звука принимается в различных эхо-лотах 1 440^-1 490 м/ск. Эхо-лоты позволяют измерять глубины, не уменьшая хода и не стопоря машины, при любой погоде; измерение глубины требует малого промежутка времени. Этим эхо-^оты выгодно отличаются от ручных и механич. лотов. Некоторые эхо-лоты производят измерения глубин автоматически или полуавтоматически, имеют регистрирующие приборы и позволяют измерять любые глубины до наибольших океанских; другие требуют для измерения глубины выслушивания сигнала и измеряют лишь прибрежные глубины до 200—500 метров Среди многочисленных эхо-лотов более распространенными являются: эхо-лот bathometer, эхо-лот Depth b inder (США), ультразвуковой эхо-лот Langevin-rlorisson, эхо-лот Marti (Франция), Behmlot, Atlaslot, Signallot (Германия) и эхо-лот Британского адмиралтейства для океанских и для малых глубин. Последний пользуется наибольшим распространением. Эхо-лоты имеют Электр одинамич. и электромагнитные звуковые вибраторы; в эхо-лотах сист. Langevin имеется пьезоэлектрич. кварцевый конденсатор—излучатель; применяются также пружинные и пнев-матич. ударные передатчики, ы ов, удары пули о воду и т. д. Автоматические эхолоты имеют усилительные устройства и ряд реле для указания глубин. Однако во всех эхо-лотах измерение глубин сводится к измерению угла поворота диска, вращающегося с постоянной скоростью. Для поддержания постоянства скорости наряду с центробежными электрич. регуляторами применяются фонич. моторы, в которых скорость поддерживается постоянной посредством камертона.
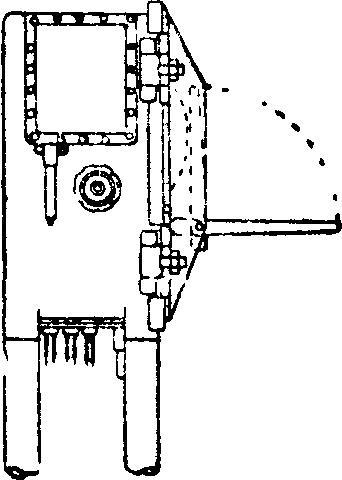
Э х о-л о т Британского адмиралтейства для малых глубин (до 235 м), принятый на судах СССР, состоит из следующих частей (фигура 16): трансмиттера—отправителя сигналов, —гидрофона—приемника их—и приемно-отправитель-ной станции. Трансмиттера представляет собой круглую коробку, в нижней части которой имеется плоская стальная мембрана. Внутри трансмиттера находится ударник, посылаемый пружиной на мембрану: в поднятом положении ударник удерживается электромагнитом. При размыкании тока в цепи последнего ударник падает на мембрану, и трансмиттер подает сигнал. Гидрофон б представляет спбой коробку, подобную трансмиттеру, мембрана гидрофона механически соединена с обычным апериодич. угольным микрофоном. Микрофон, заключенный в гидрофоне, изолирован рядом резиновых прокладок. Трансмиттер и гидрофон устанавливаются в
6
:ФИГ. 1 6.
междудонном пространстве корабля, и их мембраны либо непосредственно соприкасаются с зной водой либо, при установке приборов в заполненных водой ящиках (танках), звук передается в воду через обшивку корабля. Трансмиттер и гидрофон устанавливаются с различных бортов корабля так, чтобы корпус корабля являлся экраном для непосредственного прихода звука от трансмиттера к гидрофону. Приемно-отправительная станция в, схематически изображенная л на фигуре 17, заключает в себе небольшой электродвигатель а, работающий с постоянной скоростью, для чего имеется особый центробежный регулятор. Этот двигатель вращает вал б со скоростью 3 об/ск. На валу укреплены два металлических диска-выключателя в и г, на поверхности которых имеются узкие полоски из изолирующего материала. К выключателю в трансмиттера прилегают 2 щетки, через которые подается ток в обмотки электромагнитов трансмиттера ό; при подходе полоски изолятора под щетки трансмиттер подает сигнал. К выключателю г телефона прилегают щетки, замыкающие нормально телефон е накоротко.
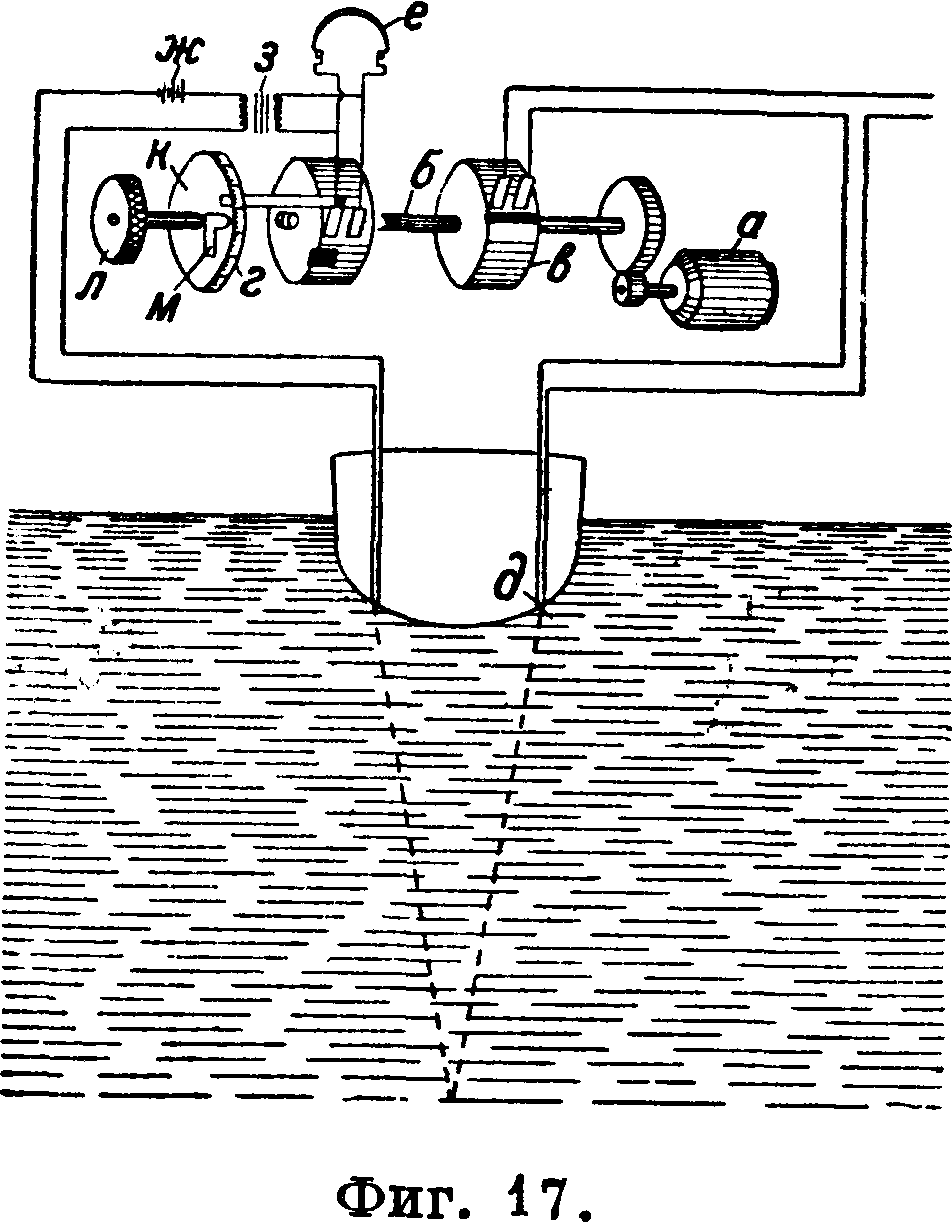
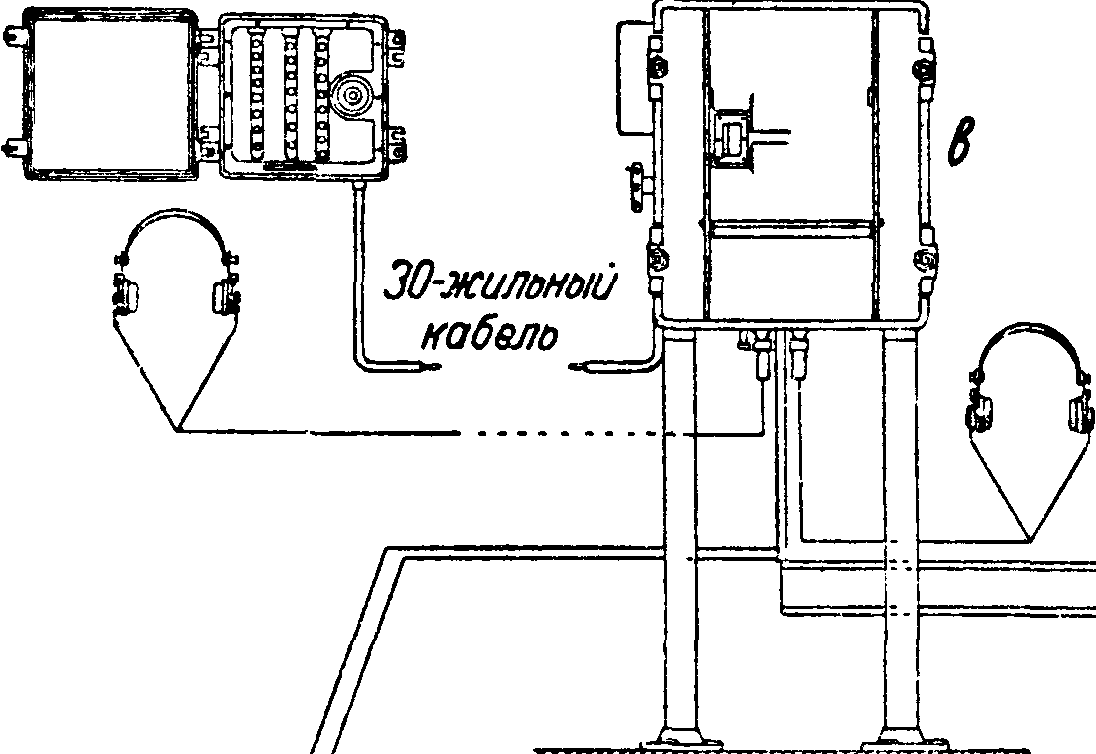
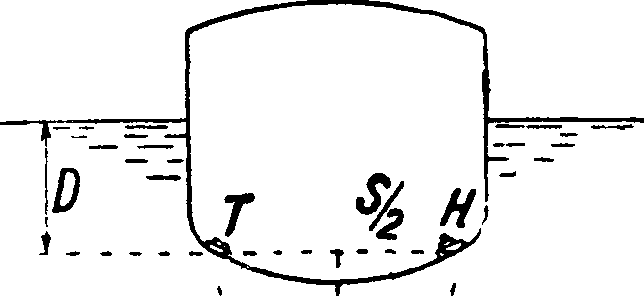
Последний через трансформатор з соединен с линией гидрофона, питаемой батареей ж. Очевидно звук в телефоне может быть услышан лишь 3 раза в ск., когда под одну из щеток подходит изолятор. Телефонные щетки соединены с шкалой глубин к и вместе с шкалой могут поворачиваться с помощью рукоятки л. Шкала имеет неподвижный индекс м. Пусть в некоторый момент под щетками трансмиттера и телефона одновременно находятся полоски изолятора выключателей, шкала глубин при этом стоит на нуле. В этот момент трансмиттер подает сигнал, звук идет к грунту, отражается от него и достигает гидрофона. За время движения звука в воде вал с выключателями успеет повернуться на нек-рый угол, являющийся функцией только глубины, т. к. скорость вращения вала постоянна. Измерив угол поворота изолятора вала, легко определить путь звука в воде и глубину. Если щетки к моменту прихода эхо сигнала находятся в нулевом положении, звук в телефоне услышан не будет, т. к. они замкнуты накоротко. Для измерения угла сдвига изолятора, а следовательно и глубины, наблюдатель должен слушать в телефон и медленно поворачивать рукояткой телефонные щетки в сторону вращения выключателя. В тот момент, когда одновременно с приходом звука к гидрофону под щеткой будет оказываться изолятор, сигнал в телефоне будет слышен, а щетки будут сдвинуты от нулевого положения на угол, измеряющий глубину, к-рую и укажет отсчет шкалы у индекса. Для измерения глубины достаточно пустить эхо-лот в ход, одеть головной телефон и медленно поворачивать рукоятку до тех пор, пока не будут слышны удары трансмиттера. Вся операция требует нескольких секунд. Глубины, измеренные эхо-лотом, должен быть исправлены (фигура 18): 1) на углубление трансмиттера и гидрофона Ό, т. к. глубину надо получить до ватерлинии корабля, а не до линии приборов, как дает эхо-лот; эта поправка исключается сдвигом индекса; 2) на запаздывание удара трансмиттера от момента размыкания его цепи. Запаздывание регулируется до постоянной величины, и поправка исключается сдвигом вперед выключателя трансмиттера, благодаря чему размыкание происходит ранее нулевого момента на величину запаздывания; 3) на расстояние между трансмиттером и гидрофоном, т. к. эхо-лот измеряет сторону тр-ка трансмиттер—грунт—гидрофон (ТРЯ), а не высоту его. Эта поправка
-1
р
Фигура 18.
δλ=ιΛ*+ (!)2-ь
(где h—глубина, S—расстояние между трансмиттером и гидрофоном) зависит от глубины. Поправка исключается при помощи диферен-циального сцепления телефонных щеток с шкалой глубин, к-рое сдвигает вперед щетки на величину поправки относительно шкалы, отсчет которой дает всегда действительную глубину до ватерлинии. В эхо-лоте Брит, адмиралтейства скорость звука принята 1 440 м/ск.
Лит.: КрыловА. и Прутков Ю., Общая теория гироскопов и нек-рых технич. их применений, Л.,
1932; Кудревич Б., Элементарная теория и практика гироскопич. компаса, ч. 1, Элементарная теория, 2 изд.г Л., 1928, ч. 2; Практика гирокомпаса, 2 изд. Л., 1931; Михайлов Д., Иконников Д., Гирокомпасы Сперри, «марка VI» и «марка VIII», 2 изд., Л., 1931; Кудревич Б., Новый Аншютц, Л., 1931; его ж егСборка, балансировка и выверка гирокомпаса Сперри, «марка V», Л., 1927; его же, Гирокомпас и управление огнем, Л., 1928; Страхов Б., Жироскопич. компас Sperry, П., 1916; Минорский Н., Жироскопич. компас, П., 1916; Палецкий П., Одограф Вилье, Л.г1928; А р а н о в Н., Автоматич. рулевой фирмы Сперри, «марка III», Л., 1930; Палецкий П., Лаг Форбса, описание и инструкция по установке и уходу, Л., 1925; Иконников Д., Лаг Черникеева, Л., 1930; Ухов К., Звуковое измерение глубин, Л., 1929; Кудревич Б., Эхо-лот образца британского адмиралтейства для малых глубин, Л., 1929; его же, О применении гироскопич. компаса на коммерческом флоте и миноносцах, «Морской сборник», Л., 1923, I, 2; егоше, Что такое гироскопич. компас, «Красный флот», Л., 1922, 9; его же, Гироскопич. компас в торговом флоте, «Торговый флот», Л., 1923, 3; его же, Новый гирокомпас Сперри, «Записк» по гидрографии», Ленинград, 1923,т. 47; его же, О гирокомпасе Броуна в связи с конструкциями приборов Аншютца и Сперри, там же, Ленинград, 1923, т. 46; егоше, Подводная звуковая сигнализация и ее современное применение, «Военно-морская научная мысль», Ленинград, 1926, 1; егоше, Новейшие электронави-гационные приборы, там же, Ленинград, 1926, 1; Ш в е -Д e Е., Звуковые лоты, «Записки по гидрографии», Ленинград, 1924, т. 48; Палецкий П., Ультразвуковой лот, там же, Ленинград, 1926,т. 51. Д. Михайлов и Л. Павлушков.